
تو متن بالا که وابسته به یه موتور پروازیه. وقتی هوا رو داخل موتور گرم میکنن، این گرما باعث ایجاد فشار میشه و اونجا یه واکنش رانش به وجود میاد. برای موتورهای توربوجت خالص، خصوصاً اگه کمپرسور گریز از مرکز داشته باشی، این فشار بیشتر از فشار رانش کمپرسور میشه. حتی اگه یکم کوچیکتر از حد تصور باشه.
برای هواپیماهای فراتر از صوت، وقتی هوا وارد میشه، مثل یه کمپرسور ضربهای عمل میکنه که نیروی رانش بیشتری ایجاد میکنه. در عین حال، با گسترش اگزوز در برابر یه نازل واگرا، میشه بیشترین نیروی رانش رو تولید کرد. در سرعتهای بالا، تقریباً تمام نیروی رانش از گازهای گرم حاصل از احتراق سوخت در هوای فشرده بیرون میاد. این گازها به سمت نازل لوله اگزوز فرستاده میشن و باعث ایجاد یه نیروی رانش بزرگ میشن.
نیروی رانش به خودی خود یه چیزی رو "فشار" نمیکنه. این گازها در حال انبساط هستن و تنها یه راه برای رفتن دارن، به همین دلیل به سمت شتاب میگیرن و شما یه عمل واکنش-عکسی نیوتنی دارید، مثل اینکه یه بادکنک رو رها کنید. نیروی رانش از شتاب گازها ناشی میشه که توسط لاستیک بادکنک فشرده میشن و وقتی از دهانه بالون خارج میشن، به سمت عقب حرکت میکنن.
بعضی از بارهای رانش از کمپرسور تا حد زیادی با بارهای پس از توربین جبران میشن، پس قرقره به نوعی سعی میکنه خودشو در حد کشش نگه داره، حتی اگه یه قسمت از نیروی رانش به جلو باشه و بخشی از بار رانش کمپرسور از بعد توربین بیشتر باشه. این بارها به ویژه با استفاده از یاتاقانهای توپی طراحی میشن که بتونند بارهای محوری رو تحمل کنن.
همچنین وقتی به یه توربوجت با کمپرسور گریز از مرکز فکر میکنید، بدون تیغه که به جلو حرکت میکنه، فقط کانالهای هوای انحنادار رو به بیرون پرتاب میکنه. چطور میتونید از این خوراکیترین چیزها سود ببرید؟ توربوجت گریز از مرکز فشار خودش رو از همون محل محوری بین توربین و نازل اگزوز میگیره.
تو یه توربوفن، یک قسمت از انرژی در جریان گازهای خروجی اگزوز توسط یه توربین جداگانه استخراج میشه تا گشتاوری برای چرخاندن فن ایجاد بشه. توربوفن در واقع یه توربوپراپ با توربین آزاده که یه ملخ دنده نشده و گام ثابت با تعداد زیادی پره داره. بخشی از رانش از انبساط انرژی مازاد گاز تا زمانی که توسط توربین فن استخراج میشه و شاید بخشی از بار رانش مازاد از کمپرسور هسته به بیرون هدایت میشه، اما بیشتر از طریق فن است و یاتاقانهای جلوی فن. به گونهای طراحی شده که بتونه بیشترین قابلیت تحمل بار رانش موتور رو داشته باشه.
هوافضا
-
rohamavation

نام: roham hesami radرهام حسامی راد
محل اقامت: 100 مایلی شمال لندن جاده آیلستون، لستر، لسترشر. LE2
عضویت : سهشنبه ۱۳۹۹/۸/۲۰ - ۰۸:۳۴
پست: 3291-
سپاس: 5494
- جنسیت:
تماس:
-
rohamavation
نام: roham hesami radرهام حسامی راد
محل اقامت: 100 مایلی شمال لندن جاده آیلستون، لستر، لسترشر. LE2
عضویت : سهشنبه ۱۳۹۹/۸/۲۰ - ۰۸:۳۴
پست: 3291-
سپاس: 5494
- جنسیت:
تماس:
Re: هوافضا
من در اینجا به سوال مشابهی برخورد کرده ام. اگرچه پاسخ توضیح زیادی در مورد چرایی آن نمی دهد و تا حدودی مبهم است. من خوانده ام که کمپرسور گریز از مرکز می تواند افزایش فشار بالاتری در هر مرحله نسبت به کمپرسور محوری داشته باشد. بنابراین از نظر فنی آنها کمتر مستعد رکود و موج هستند.
چگونه استال و موج در یک کمپرسور گریز از مرکز با آنچه در کمپرسور محوری رخ می دهد متفاوت است. چه سناریوهایی وجود دارد که یک کمپرسور گریز از مرکز از کار می افتد و/یا افزایش می یابد (آیا این سناریوها مانند آن سناریوها در کمپرسور محوری است. اگر چنین است، من یک ایده تقریبی دارم)؟ و اولین بار در کجای کمپرسور گریز از مرکز (پروانه یا دیفیوزر) استال/سرج رخ می دهد؟
آیا به این دلیل است که تیغه های روتور کمپرسورهای گریز از مرکز مانند ایرفویل عمل نمی کنند؟
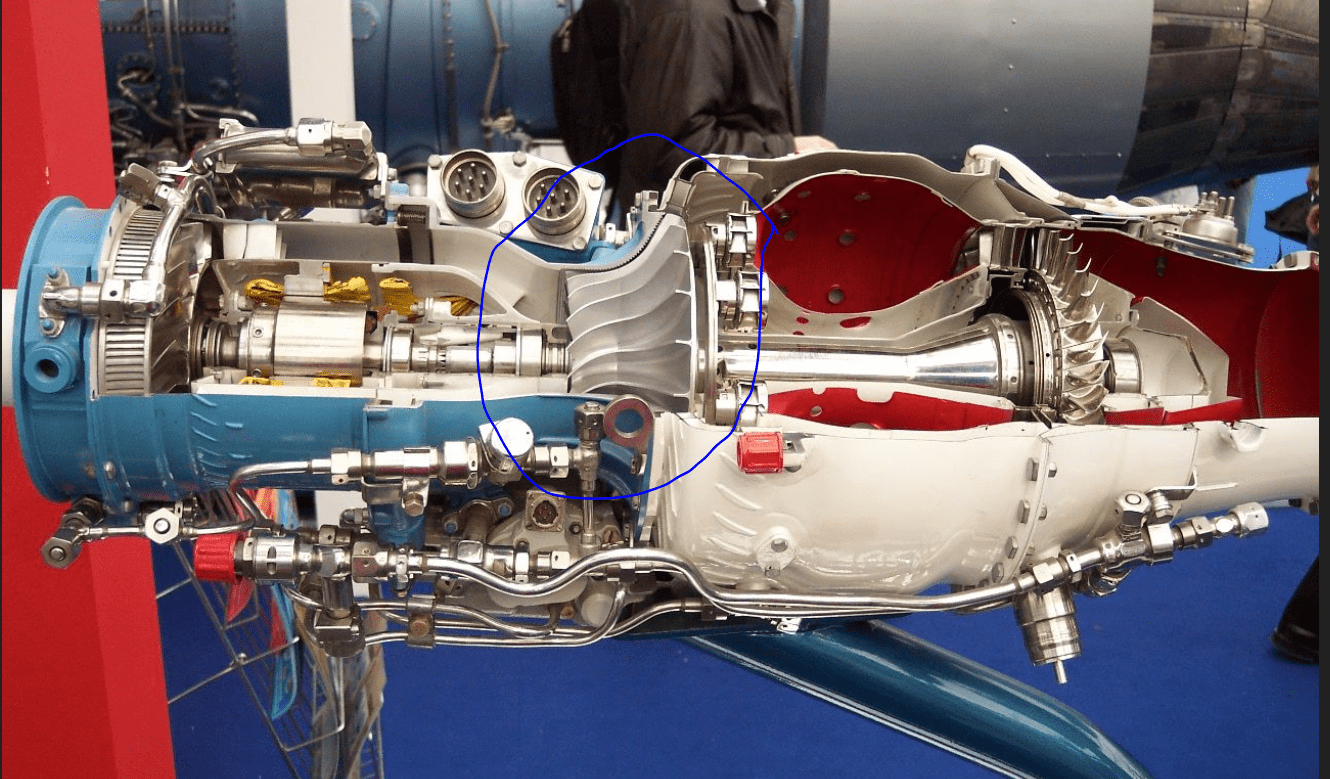
دلیل آن به اصل عملکرد کمپرسورها برمی گردد - کمپرسور گریز از مرکز، همانطور که از نامش پیداست، به سرعت به دور خود می چرخد و نیروی گریز از مرکز هوا را فشرده می کند. همانطور که در تصویر زیر می بینید، پره های پروانه یک کمپرسور گریز از مرکز فقط به فشار دادن هوا در یک دایره (بر خلاف ایرفویل) کمک می کند و نیروی گریز از مرکز فشرده سازی را انجام می دهد: کمپرسور گریز از مرکز به رنگ آبی دایره شده است. همانطور که می بینید، هنگامی که پروانه می چرخد، هوا را به طرفین فشار می دهد. توضیحات تصویر را در اینجا وارد کنید
یک کمپرسور محوری دارای پره هایی است که مانند روتورهای کوچک کار می کنند (که در واقع فقط بال های چرخان هستند) - روتورها هوا را شتاب می دهند و استاتورها دوباره هوا را کاهش می دهند و از انرژی جنبشی برای فشرده سازی گاز استفاده می کنند. درست مانند بال ها، این تیغه ها می توانند هر زمان که جریان ورودی به اندازه کافی مختل شود، متوقف شده و عملکرد خود را از دست بدهند (به طوری که زاویه حمله محلی بخشی از تیغه برای شرایط جریان محلی داده شده بیش از حد بالا باشد). این استال می تواند به طور بالقوه به تیغه های دیگر یا کل موتور سرایت کند.
همانطور که گفتید، پره های یک پروانه در یک کمپرسور گریز از مرکز مانند ایرفویل کار نمی کنند (در عوض، آنها فقط می چرخند و هوا را به اطراف فشار می دهند، مانند یک گردان)، بنابراین اگر با اختلالات جریان هوا مواجه شوند، مانند ایرفویل متوقف نمی شوند. یک ایرفویل خواهد بود. البته، اگر اختلال در جریان هوا چیزی شبیه محدود کردن شدید جریان هوا باشد، کمپرسور افزایش مییابد، اما این در عمل نادر است.
بنابراین، در مقایسه با یک کمپرسور گریز از مرکز، که نیاز به محدود کردن جریان هوا دارد، بسیار سادهتر است که یک کمپرسور محوری را به حالت افزایش یا توقف درآورید (فقط با ایجاد مزاحمت زیاد در جریان هوا).
پاسخ شما در مورد قسمت افزایشی که جزئیاتی در مورد توقف ندارد پاسخ داد. همچنین آیا فقط این است که نیروی گریز از مرکز هوا را فشرده می کند و در نتیجه آن را کمتر افزایش می دهد؟ من از متنی خوانده ام که پروانه می تواند متوقف شود و همچنین امکان استال چرخشی در کمپرسور گریز از مرکز در زیر منطقه پایدار کار وجود دارد. همچنین موج از مسیر عبور دیفیوزر شروع می شود و برای به حداقل رساندن آن تعداد پره ها در دیفیوزر کمتر از تعداد پره ها در پروانه نگه داشته می شود. من اینها را در کتاب درسی خواندم و ممکن است اینها نکاتی باشد که می توانید اضافه کنید. همچنین این فقط چند خطی است که خوانده ام، دلایل آن را نمی دانم. –
رای یک سیستم تراکمی که در شرایط عادی کار می کند، کاهش جرم جریان منجر به افزایش افزایش فشار می شود. با کاهش مداوم جریان جرمی، به نقطه حداکثر نسبت فشار میرسید که پس از آن کمپرسور متفاوت عمل میکند. این می تواند باعث توقف آیرودینامیکی در جریان و کاهش عملکرد شود.
استال چرخشی (اغلب به آن استال گفته می شود) یک مکانیسم عملیاتی پایدار است که به کمپرسور اجازه می دهد تا با جریان جرم بسیار کوچک سازگار شود و بر عملکرد کلی تأثیر می گذارد. برخی از مناطق متوقف به نام "سلول" ظاهر می شوند که جریان بسیار کمی دارند (سرعت کم). می توان این را با استال روی ایرفویل ها مقایسه کرد، اما انسداد ناشی از سلول ها بر بروز تیغه های مجاور (یا ردیف های پایین دست) تأثیر می گذارد. توجه داشته باشید که استال (اغلب در واقع) می تواند قبل از افزایش موج باشد، اما نه همیشه.
سرج فرآیندی ناپایدار است که در آن میانگین جریان جرمی حلقوی با زمان و به صورت چرخه ای تغییر می کند. کمپرسور از یک فاز بدون توقف به فاز متوقف می شود و دوباره برمی گردد. این ناپایداری جریان نه تنها مربوط به کمپرسور به تنهایی بلکه در کل سیستمی است که در آن کار می کند. معمول است که این را با یک دریچه گاز مدل کنید (تصویر زیر را ببینید).
در منطقه عملیاتی اسمی، کمپرسور بدون قید و شرط پایدار است زیرا خطوط کمپرسور و دریچه گاز رفتار «مخالف» دارند. کاهش اندک در جریان جرم منجر به افزایش افزایش فشار از طریق کمپرسور و کاهش افت فشار در گاز می شود. بنابراین، جریان تا زمان تعادل شتاب می گیرد.
در منطقه ناپایدار، دریچه گاز تغییرات افزایش فشار را به دلیل جریان جرمی ناپایدار جبران نمی کند.
برای پاسخ به سوال شما، مکانیسم هایی که قبلا ارائه شده اند برای هر سیستم فشرده سازی معتبر هستند.
در واقع، کمپرسورهای گریز از مرکز گاهی اوقات به دلیل عدم تقارن پایین دست، با استال کار می کنند: نزدیک نوک القاء کننده یا روی پروانه. اما آنها می توانند حتی با وجود توقف پایدار باقی بمانند، و احتمال وقوع افزایش کمتر است.
دلیل این امر این است که بخش بزرگی از فشرده سازی توسط اثرات گریز از مرکز با یا بدون استال چرخشی انجام می شود. خط کمپرسور در ناحیه متوقف شده (در نمودار قبلی) احتمالاً صاف تر است (وبنابراین پایدارتر) برای یک گریز از مرکز.
کار انجام شده توسط یک کمپرسور را می توان با قضیه اویلر تخمین زد (با در نظر گرفتن گشتاور ورودی/خروجی تکانه):
این به دو روش برای انجام کار از طریق کمپرسور اشاره دارد: جریان انحراف (V تتا) و/یا بزرگ کردن بخش (شعاع r). آخرین مورد آشکارا مربوط به نیروهای گریز از مرکز است.
اگر استال رخ دهد، انحراف (V تتا) حداقل به صورت موضعی تحت تأثیر قرار می گیرد (زیرا استال چرخشی یک پدیده سه بعدی غیر متقارن است). برای کمپرسور محوری، بیشتر افزایش فشار توسط انحراف انجام می شود. این برای کمپرسور گریز از مرکز چندان مهم نیست
[/]
چگونه استال و موج در یک کمپرسور گریز از مرکز با آنچه در کمپرسور محوری رخ می دهد متفاوت است. چه سناریوهایی وجود دارد که یک کمپرسور گریز از مرکز از کار می افتد و/یا افزایش می یابد (آیا این سناریوها مانند آن سناریوها در کمپرسور محوری است. اگر چنین است، من یک ایده تقریبی دارم)؟ و اولین بار در کجای کمپرسور گریز از مرکز (پروانه یا دیفیوزر) استال/سرج رخ می دهد؟
آیا به این دلیل است که تیغه های روتور کمپرسورهای گریز از مرکز مانند ایرفویل عمل نمی کنند؟
دلیل آن به اصل عملکرد کمپرسورها برمی گردد - کمپرسور گریز از مرکز، همانطور که از نامش پیداست، به سرعت به دور خود می چرخد و نیروی گریز از مرکز هوا را فشرده می کند. همانطور که در تصویر زیر می بینید، پره های پروانه یک کمپرسور گریز از مرکز فقط به فشار دادن هوا در یک دایره (بر خلاف ایرفویل) کمک می کند و نیروی گریز از مرکز فشرده سازی را انجام می دهد: کمپرسور گریز از مرکز به رنگ آبی دایره شده است. همانطور که می بینید، هنگامی که پروانه می چرخد، هوا را به طرفین فشار می دهد. توضیحات تصویر را در اینجا وارد کنید
یک کمپرسور محوری دارای پره هایی است که مانند روتورهای کوچک کار می کنند (که در واقع فقط بال های چرخان هستند) - روتورها هوا را شتاب می دهند و استاتورها دوباره هوا را کاهش می دهند و از انرژی جنبشی برای فشرده سازی گاز استفاده می کنند. درست مانند بال ها، این تیغه ها می توانند هر زمان که جریان ورودی به اندازه کافی مختل شود، متوقف شده و عملکرد خود را از دست بدهند (به طوری که زاویه حمله محلی بخشی از تیغه برای شرایط جریان محلی داده شده بیش از حد بالا باشد). این استال می تواند به طور بالقوه به تیغه های دیگر یا کل موتور سرایت کند.
همانطور که گفتید، پره های یک پروانه در یک کمپرسور گریز از مرکز مانند ایرفویل کار نمی کنند (در عوض، آنها فقط می چرخند و هوا را به اطراف فشار می دهند، مانند یک گردان)، بنابراین اگر با اختلالات جریان هوا مواجه شوند، مانند ایرفویل متوقف نمی شوند. یک ایرفویل خواهد بود. البته، اگر اختلال در جریان هوا چیزی شبیه محدود کردن شدید جریان هوا باشد، کمپرسور افزایش مییابد، اما این در عمل نادر است.
بنابراین، در مقایسه با یک کمپرسور گریز از مرکز، که نیاز به محدود کردن جریان هوا دارد، بسیار سادهتر است که یک کمپرسور محوری را به حالت افزایش یا توقف درآورید (فقط با ایجاد مزاحمت زیاد در جریان هوا).
پاسخ شما در مورد قسمت افزایشی که جزئیاتی در مورد توقف ندارد پاسخ داد. همچنین آیا فقط این است که نیروی گریز از مرکز هوا را فشرده می کند و در نتیجه آن را کمتر افزایش می دهد؟ من از متنی خوانده ام که پروانه می تواند متوقف شود و همچنین امکان استال چرخشی در کمپرسور گریز از مرکز در زیر منطقه پایدار کار وجود دارد. همچنین موج از مسیر عبور دیفیوزر شروع می شود و برای به حداقل رساندن آن تعداد پره ها در دیفیوزر کمتر از تعداد پره ها در پروانه نگه داشته می شود. من اینها را در کتاب درسی خواندم و ممکن است اینها نکاتی باشد که می توانید اضافه کنید. همچنین این فقط چند خطی است که خوانده ام، دلایل آن را نمی دانم. –
رای یک سیستم تراکمی که در شرایط عادی کار می کند، کاهش جرم جریان منجر به افزایش افزایش فشار می شود. با کاهش مداوم جریان جرمی، به نقطه حداکثر نسبت فشار میرسید که پس از آن کمپرسور متفاوت عمل میکند. این می تواند باعث توقف آیرودینامیکی در جریان و کاهش عملکرد شود.
استال چرخشی (اغلب به آن استال گفته می شود) یک مکانیسم عملیاتی پایدار است که به کمپرسور اجازه می دهد تا با جریان جرم بسیار کوچک سازگار شود و بر عملکرد کلی تأثیر می گذارد. برخی از مناطق متوقف به نام "سلول" ظاهر می شوند که جریان بسیار کمی دارند (سرعت کم). می توان این را با استال روی ایرفویل ها مقایسه کرد، اما انسداد ناشی از سلول ها بر بروز تیغه های مجاور (یا ردیف های پایین دست) تأثیر می گذارد. توجه داشته باشید که استال (اغلب در واقع) می تواند قبل از افزایش موج باشد، اما نه همیشه.
سرج فرآیندی ناپایدار است که در آن میانگین جریان جرمی حلقوی با زمان و به صورت چرخه ای تغییر می کند. کمپرسور از یک فاز بدون توقف به فاز متوقف می شود و دوباره برمی گردد. این ناپایداری جریان نه تنها مربوط به کمپرسور به تنهایی بلکه در کل سیستمی است که در آن کار می کند. معمول است که این را با یک دریچه گاز مدل کنید (تصویر زیر را ببینید).
در منطقه عملیاتی اسمی، کمپرسور بدون قید و شرط پایدار است زیرا خطوط کمپرسور و دریچه گاز رفتار «مخالف» دارند. کاهش اندک در جریان جرم منجر به افزایش افزایش فشار از طریق کمپرسور و کاهش افت فشار در گاز می شود. بنابراین، جریان تا زمان تعادل شتاب می گیرد.
در منطقه ناپایدار، دریچه گاز تغییرات افزایش فشار را به دلیل جریان جرمی ناپایدار جبران نمی کند.
برای پاسخ به سوال شما، مکانیسم هایی که قبلا ارائه شده اند برای هر سیستم فشرده سازی معتبر هستند.
در واقع، کمپرسورهای گریز از مرکز گاهی اوقات به دلیل عدم تقارن پایین دست، با استال کار می کنند: نزدیک نوک القاء کننده یا روی پروانه. اما آنها می توانند حتی با وجود توقف پایدار باقی بمانند، و احتمال وقوع افزایش کمتر است.
دلیل این امر این است که بخش بزرگی از فشرده سازی توسط اثرات گریز از مرکز با یا بدون استال چرخشی انجام می شود. خط کمپرسور در ناحیه متوقف شده (در نمودار قبلی) احتمالاً صاف تر است (وبنابراین پایدارتر) برای یک گریز از مرکز.
کار انجام شده توسط یک کمپرسور را می توان با قضیه اویلر تخمین زد (با در نظر گرفتن گشتاور ورودی/خروجی تکانه):
این به دو روش برای انجام کار از طریق کمپرسور اشاره دارد: جریان انحراف (V تتا) و/یا بزرگ کردن بخش (شعاع r). آخرین مورد آشکارا مربوط به نیروهای گریز از مرکز است.
اگر استال رخ دهد، انحراف (V تتا) حداقل به صورت موضعی تحت تأثیر قرار می گیرد (زیرا استال چرخشی یک پدیده سه بعدی غیر متقارن است). برای کمپرسور محوری، بیشتر افزایش فشار توسط انحراف انجام می شود. این برای کمپرسور گریز از مرکز چندان مهم نیست
[/]

-
rohamavation
نام: roham hesami radرهام حسامی راد
محل اقامت: 100 مایلی شمال لندن جاده آیلستون، لستر، لسترشر. LE2
عضویت : سهشنبه ۱۳۹۹/۸/۲۰ - ۰۸:۳۴
پست: 3291-
سپاس: 5494
- جنسیت:
تماس:
Re: هوافضا
کتاب اصول پیشران یا جلو برندگی رو بگم
اصول پیشرانش جت:
ساختار و عملکرد انواع سیستمهای پیشرانش جت
مدارها و فرایندهای جریان در موتورهای توربوجت، توربوپراپ، توربوفن، توربوشفت، رمجت، توربورمجت، اسکرمجت
نیروی پیشرانش و پارامترهای عملکردی موتورهای جت
نیروی پیشرانش نصب شده، نیروی پیشرانش بر اساس مجموع ضربههای اجزا موتور، نیروی پیشرانش ویژه، مصرف ویژه سوخت، ضربه ویژه، بازده حرارتی، بازده پیشرانش، بازده کل
مبانی طراحی موتورهای جت
الگوریتمهای طراحی، تشریح الگوریتمهای طراحی
تحلیل چرخههای موتورهای جت
تحلیل عملکرد توربین گازی، مولد گاز، موتور توربوجت، موتور توربوجت با پسسوز، موتور توربوفن با نسبت کنارگذر کموزیاد، موتور توربوفن با جریان اگزوز مخلوط و پسسوز، موتور توربوپراپ، تئوری ملخ، تحلیل چرخه موتور توربوپراپ
عملکرد دهانه ورودی و شیپوره
عملکرد دهانه ورودی مادون صوت، عملکرد دیفیوزر مادون صوت، عملکرد دهانه ورودی مافوق صوت، عملکرد شیپوره
- معرفی انواع جلوبرنده ها
- انواع موتورها
- مکانیک و ترمودینامیک جریان سیال
- جریان یک بعدی
- امواج ضربه ای
- لایه هم مرزی
- راندمان
- برد
رم جت
- اثر تلفات ایرودینامیک
- موتور توربوجت
- تحلیل سیکل ترمودینامیکی توربوجت
- توربوجت
- توربوپراپ و توربوشفت
- موتور ایده آل
- عملکرد موتور ایده آل
- سازگاری موتور هواپیما
- دهانه های صوتی
- دهانه های فراصوت
- مساله تداخل لایه مرزی و موج ضربه ای
- محفظه احتراق
- کمپرسورهای محوری
- پدیده surge
- راندمان کمپرسور
- درجه عکس العمل کمپرسور
طراحی هواپیما ۱ (Airplane Design I)
معرفی انواع مختلف هواپیماها و مراحل طراحی آنها از ایده تا تولید و گواهینامهی پرواز.
گروههای طراحی تیمی:
بررسی گروههای طراحی تیمی و نقش هر یک در فرآیند طراحی هواپیما.
طراحی اندازه، ساختار، وزن و جزئیات:
بحث درباره طراحی اندازه، ساختار، وزن و جزئیات هواپیما با توجه به نیازها و مشخصات مورد نظر.
تحلیل کمی حساسیت وزن هواپیما:
تحلیل و بررسی حساسیت وزن هواپیما به عوامل مختلف در فرآیند طراحی.
طراحی اندازه، ساختار، و قدرت موتور:
بررسی و طراحی اندازه، ساختار، و قدرت موتور هواپیما با توجه به عملکرد مورد نظر.
طراحی اندازه، ساختار، و چیدمان معماری هواپیما:
بحث درباره طراحی اندازه، ساختار، و چیدمان معماری هواپیما به منظور بهبود عملکرد و کارایی.
طراحی تلفیق موتور با هواپیما و اندازهگیری قدرت موتور در ارتفاعات و سرعتهای پرواز:
بررسی و طراحی تلفیق موتور با هواپیما و اندازهگیری قدرت موتور در شرایط مختلف پرواز.
طراحی چیدمان و معماری بال و اندازهگیری سطوح کنترل:
بحث درباره طراحی چیدمان و معماری بال و اندازهگیری سطوح کنترل برای کنترل بهینه هواپیما.
طراحی و تحلیل برافزاها و اندازهگیری آنها:
بررسی و طراحی برافزاها و تحلیل عملکرد آنها به منظور بهبود عملکرد هواپیما.
طراحی مساحت و استقرار مجموعه دم و تعیین سطوح کنترلی:
بحث درباره طراحی مساحت و استقرار مجموعه دم و تعیین سطوح کنترلی برای کنترل بهینه هواپیما.
طراحی و استقرار ارابههای فرود اصلی و دماغه و اجابت الزامات واژگونی:
بررسی و طراحی ارابههای فرود اصلی و دماغه به منظور اجابت الزامات واژگونی و ایمنی پرواز.
طراحی و تحلیل مرکز ثقل اجزاء اصلی هواپیما و یافتن محدوده مرکز جرم:
بررسی و تحلیل مرکز ثقل اجزاء اصلی هواپیما و یافتن محدوده مرکز جرم به منظور تعادل مناسب هواپیما.
جمعبندی پیکربندی و دادههای وزنی، مساحتی و فواصل مهم:
جمعبندی و بررسی دادههای وزنی، مساحتی و فواصل مهم و کارایی برجسته و انتشار پنجنمای هواپیما.
طراحی و تحلیل هندسی پایداری استاتیک طولی هواپیما و اصلاح موقعیت آمپناژ (دمهای افقی):
بررسی پایداری استاتیکی طولی هواپیما و تحلیل موقعیت آمپناژ (دمهای افقی) به منظور بهبود عملکرد و استقرار مناسب هواپیما در هنگام پرواز.
طراحی و تحلیل هندسی پایداری استاتیکی سمتی هواپیما و اصلاح موقعیت آمپناژ (دمهای عمودی)، تحلیل پیدایش هواپیما در هنگام خاموش شدن موتور و اصلاح رادار در دمهای عمودی:
بررسی پایداری استاتیکی سمتی هواپیما و اصلاح موقعیت آمپناژ (دمهای عمودی)، تحلیل پیدایش هواپیما در هنگام خاموش شدن موتور و بهبود رادار در دمهای عمودی.
طراحی و معماری عرشه خلبان، استقرار صندلیهای پدال، اهرمها، کنسول و دستهگاز و کنترلهای فرمان، تحلیل و اصلاح فریم و شیشههای عرشه برای اجابت الزامات دید بیرون هواپیما:
طراحی و معماری عرشه خلبان به منظور استقرار صندلیهای پدال، اهرمها، کنسول و دستهگاز و کنترلهای فرمان، تحلیل و بهبود فریم و شیشههای عرشه برای اطمینان از اجابت الزامات دید بیرون هواپیما.
طراحی و معماری و لیآت داخل کابین و پنجرهها، صندلیها، راهروها، رختکن، آشپزخانه و توالت برای مسافر و اجابت الزامات راحتی مسافر:
بررسی و طراحی لیآت و معماری داخل کابین و پنجرهها، صندلیها، راهروها، رختکن، آشپزخانه و توالت برای اطمینان از اراحتی مسافران و اجابت الزامات مربوطه.
طراحی فاصلهگذاری و لیآت معماری سازههای کلیدی بال و بدنه، بر اساس ملاحظات بارهای کلیدی و تداخلات با موتور، ارابههای فرود، کابین مسافر و پنجره و سپر باد و کفسازی، و رادارها و تجهیزات کلیدی هواپیما:
بررسی و طراحی فاصلهگذاری و لیآت معماری سازههای کلیدی بال و بدنه بر اساس بارهای کلیدی و تداخلات با موتور، ارابههای فرود، کابین مسافر و پنجره و سپر باد و کفسازی، و رادارها و تجهیزات کلیدی هواپیما.
**سیستم سوخت در سطح هواپیما: طراحی پروتکلها برای تعریف و تشریح مأموریت و دستهبندی سیستمهای سوختگیری، سیستمهای ونت، سیستمهای سوپلای سوخت به موتور، انتقال سوخت، اندازهگیری و مدیریت سوخت، بلوک دیاگرام، سامانههای کلیدی، و پروتکل استقرار در هواپیما.
**سیستمهای آویونیکس در سطح هواپیما: طراحی پروتکلها برای تعریف و تشریح مأموریت و دستهبندی زیرسیستمهای مخابراتی، ناوبری، وضعیت هواپیما، کمک پرواز و سیستم کمک ایمنی، بلوک دیاگرام، سامانههای کلیدی، و پروتکل استقرار در هواپیما.
**سیستم هیدرولیک در سطح هواپیما: طراحی پروتکلها برای تعریف و تشریح مأموریت و دستهبندی زیرسیستمهای رزروی، توزیع در بازوها، سیستمهای اورژانس در پرواز و فرود، بلوک دیاگرام، سامانههای کلیدی، و پروتکل استقرار در هواپیما.
**سیستمهای حیات در سطح هواپیما: طراحی پروتکلها برای تعریف و تشریح مأموریت و دستهبندی زیرسیستمهای ارکاندیشن، کنترل فشار، اکسیژن، و محافظت از یخزدگی، بلوک دیاگرام، سامانههای کلیدی، و پروتکل استقرار در هواپیما.
برآورد هزینههای طراحی، نمونهسازی، پرواز و گواهی، تولید، بهرهبرداری و اسقاط هواپیما، و تحلیلهای مربوطه و انتشار هزینه چرخه عمر هواپیما:
برآرد هزینههای مختلف مربوط به هواپیما از جمله طراحی، نمونهسازی، پرواز و گواهی، تولید، بهرهبرداری و اسقاط، و تحلیلهای مربوطه و انتشار جزئیات آنها.
جمعبندی پروتکلها و اصلاحات هواپیما و انتشار استاندارد اسپک هواپیما در پیکربندی و معماری سیستم و سازهها:
جمعبندی پروتکلها و اصلاحات مربوط به هواپیما و انتشار استاندارد اسپک هواپیما در پیکربندی و معماری سیستم و سازهها.
اصول پیشرانش جت:
ساختار و عملکرد انواع سیستمهای پیشرانش جت
مدارها و فرایندهای جریان در موتورهای توربوجت، توربوپراپ، توربوفن، توربوشفت، رمجت، توربورمجت، اسکرمجت
نیروی پیشرانش و پارامترهای عملکردی موتورهای جت
نیروی پیشرانش نصب شده، نیروی پیشرانش بر اساس مجموع ضربههای اجزا موتور، نیروی پیشرانش ویژه، مصرف ویژه سوخت، ضربه ویژه، بازده حرارتی، بازده پیشرانش، بازده کل
مبانی طراحی موتورهای جت
الگوریتمهای طراحی، تشریح الگوریتمهای طراحی
تحلیل چرخههای موتورهای جت
تحلیل عملکرد توربین گازی، مولد گاز، موتور توربوجت، موتور توربوجت با پسسوز، موتور توربوفن با نسبت کنارگذر کموزیاد، موتور توربوفن با جریان اگزوز مخلوط و پسسوز، موتور توربوپراپ، تئوری ملخ، تحلیل چرخه موتور توربوپراپ
عملکرد دهانه ورودی و شیپوره
عملکرد دهانه ورودی مادون صوت، عملکرد دیفیوزر مادون صوت، عملکرد دهانه ورودی مافوق صوت، عملکرد شیپوره
- معرفی انواع جلوبرنده ها
- انواع موتورها
- مکانیک و ترمودینامیک جریان سیال
- جریان یک بعدی
- امواج ضربه ای
- لایه هم مرزی
- راندمان
- برد
رم جت
- اثر تلفات ایرودینامیک
- موتور توربوجت
- تحلیل سیکل ترمودینامیکی توربوجت
- توربوجت
- توربوپراپ و توربوشفت
- موتور ایده آل
- عملکرد موتور ایده آل
- سازگاری موتور هواپیما
- دهانه های صوتی
- دهانه های فراصوت
- مساله تداخل لایه مرزی و موج ضربه ای
- محفظه احتراق
- کمپرسورهای محوری
- پدیده surge
- راندمان کمپرسور
- درجه عکس العمل کمپرسور
طراحی هواپیما ۱ (Airplane Design I)
معرفی انواع مختلف هواپیماها و مراحل طراحی آنها از ایده تا تولید و گواهینامهی پرواز.
گروههای طراحی تیمی:
بررسی گروههای طراحی تیمی و نقش هر یک در فرآیند طراحی هواپیما.
طراحی اندازه، ساختار، وزن و جزئیات:
بحث درباره طراحی اندازه، ساختار، وزن و جزئیات هواپیما با توجه به نیازها و مشخصات مورد نظر.
تحلیل کمی حساسیت وزن هواپیما:
تحلیل و بررسی حساسیت وزن هواپیما به عوامل مختلف در فرآیند طراحی.
طراحی اندازه، ساختار، و قدرت موتور:
بررسی و طراحی اندازه، ساختار، و قدرت موتور هواپیما با توجه به عملکرد مورد نظر.
طراحی اندازه، ساختار، و چیدمان معماری هواپیما:
بحث درباره طراحی اندازه، ساختار، و چیدمان معماری هواپیما به منظور بهبود عملکرد و کارایی.
طراحی تلفیق موتور با هواپیما و اندازهگیری قدرت موتور در ارتفاعات و سرعتهای پرواز:
بررسی و طراحی تلفیق موتور با هواپیما و اندازهگیری قدرت موتور در شرایط مختلف پرواز.
طراحی چیدمان و معماری بال و اندازهگیری سطوح کنترل:
بحث درباره طراحی چیدمان و معماری بال و اندازهگیری سطوح کنترل برای کنترل بهینه هواپیما.
طراحی و تحلیل برافزاها و اندازهگیری آنها:
بررسی و طراحی برافزاها و تحلیل عملکرد آنها به منظور بهبود عملکرد هواپیما.
طراحی مساحت و استقرار مجموعه دم و تعیین سطوح کنترلی:
بحث درباره طراحی مساحت و استقرار مجموعه دم و تعیین سطوح کنترلی برای کنترل بهینه هواپیما.
طراحی و استقرار ارابههای فرود اصلی و دماغه و اجابت الزامات واژگونی:
بررسی و طراحی ارابههای فرود اصلی و دماغه به منظور اجابت الزامات واژگونی و ایمنی پرواز.
طراحی و تحلیل مرکز ثقل اجزاء اصلی هواپیما و یافتن محدوده مرکز جرم:
بررسی و تحلیل مرکز ثقل اجزاء اصلی هواپیما و یافتن محدوده مرکز جرم به منظور تعادل مناسب هواپیما.
جمعبندی پیکربندی و دادههای وزنی، مساحتی و فواصل مهم:
جمعبندی و بررسی دادههای وزنی، مساحتی و فواصل مهم و کارایی برجسته و انتشار پنجنمای هواپیما.
طراحی و تحلیل هندسی پایداری استاتیک طولی هواپیما و اصلاح موقعیت آمپناژ (دمهای افقی):
بررسی پایداری استاتیکی طولی هواپیما و تحلیل موقعیت آمپناژ (دمهای افقی) به منظور بهبود عملکرد و استقرار مناسب هواپیما در هنگام پرواز.
طراحی و تحلیل هندسی پایداری استاتیکی سمتی هواپیما و اصلاح موقعیت آمپناژ (دمهای عمودی)، تحلیل پیدایش هواپیما در هنگام خاموش شدن موتور و اصلاح رادار در دمهای عمودی:
بررسی پایداری استاتیکی سمتی هواپیما و اصلاح موقعیت آمپناژ (دمهای عمودی)، تحلیل پیدایش هواپیما در هنگام خاموش شدن موتور و بهبود رادار در دمهای عمودی.
طراحی و معماری عرشه خلبان، استقرار صندلیهای پدال، اهرمها، کنسول و دستهگاز و کنترلهای فرمان، تحلیل و اصلاح فریم و شیشههای عرشه برای اجابت الزامات دید بیرون هواپیما:
طراحی و معماری عرشه خلبان به منظور استقرار صندلیهای پدال، اهرمها، کنسول و دستهگاز و کنترلهای فرمان، تحلیل و بهبود فریم و شیشههای عرشه برای اطمینان از اجابت الزامات دید بیرون هواپیما.
طراحی و معماری و لیآت داخل کابین و پنجرهها، صندلیها، راهروها، رختکن، آشپزخانه و توالت برای مسافر و اجابت الزامات راحتی مسافر:
بررسی و طراحی لیآت و معماری داخل کابین و پنجرهها، صندلیها، راهروها، رختکن، آشپزخانه و توالت برای اطمینان از اراحتی مسافران و اجابت الزامات مربوطه.
طراحی فاصلهگذاری و لیآت معماری سازههای کلیدی بال و بدنه، بر اساس ملاحظات بارهای کلیدی و تداخلات با موتور، ارابههای فرود، کابین مسافر و پنجره و سپر باد و کفسازی، و رادارها و تجهیزات کلیدی هواپیما:
بررسی و طراحی فاصلهگذاری و لیآت معماری سازههای کلیدی بال و بدنه بر اساس بارهای کلیدی و تداخلات با موتور، ارابههای فرود، کابین مسافر و پنجره و سپر باد و کفسازی، و رادارها و تجهیزات کلیدی هواپیما.
**سیستم سوخت در سطح هواپیما: طراحی پروتکلها برای تعریف و تشریح مأموریت و دستهبندی سیستمهای سوختگیری، سیستمهای ونت، سیستمهای سوپلای سوخت به موتور، انتقال سوخت، اندازهگیری و مدیریت سوخت، بلوک دیاگرام، سامانههای کلیدی، و پروتکل استقرار در هواپیما.
**سیستمهای آویونیکس در سطح هواپیما: طراحی پروتکلها برای تعریف و تشریح مأموریت و دستهبندی زیرسیستمهای مخابراتی، ناوبری، وضعیت هواپیما، کمک پرواز و سیستم کمک ایمنی، بلوک دیاگرام، سامانههای کلیدی، و پروتکل استقرار در هواپیما.
**سیستم هیدرولیک در سطح هواپیما: طراحی پروتکلها برای تعریف و تشریح مأموریت و دستهبندی زیرسیستمهای رزروی، توزیع در بازوها، سیستمهای اورژانس در پرواز و فرود، بلوک دیاگرام، سامانههای کلیدی، و پروتکل استقرار در هواپیما.
**سیستمهای حیات در سطح هواپیما: طراحی پروتکلها برای تعریف و تشریح مأموریت و دستهبندی زیرسیستمهای ارکاندیشن، کنترل فشار، اکسیژن، و محافظت از یخزدگی، بلوک دیاگرام، سامانههای کلیدی، و پروتکل استقرار در هواپیما.
برآورد هزینههای طراحی، نمونهسازی، پرواز و گواهی، تولید، بهرهبرداری و اسقاط هواپیما، و تحلیلهای مربوطه و انتشار هزینه چرخه عمر هواپیما:
برآرد هزینههای مختلف مربوط به هواپیما از جمله طراحی، نمونهسازی، پرواز و گواهی، تولید، بهرهبرداری و اسقاط، و تحلیلهای مربوطه و انتشار جزئیات آنها.
جمعبندی پروتکلها و اصلاحات هواپیما و انتشار استاندارد اسپک هواپیما در پیکربندی و معماری سیستم و سازهها:
جمعبندی پروتکلها و اصلاحات مربوط به هواپیما و انتشار استاندارد اسپک هواپیما در پیکربندی و معماری سیستم و سازهها.
-
rohamavation
نام: roham hesami radرهام حسامی راد
محل اقامت: 100 مایلی شمال لندن جاده آیلستون، لستر، لسترشر. LE2
عضویت : سهشنبه ۱۳۹۹/۸/۲۰ - ۰۸:۳۴
پست: 3291-
سپاس: 5494
- جنسیت:
تماس:
Re: هوافضا
واماندگی یا استال تو هواپیماها دو تا حالت داره:
۱. واماندگی سرعت پایین: وقتی هواپیما داره نشستن یا برخاستن میکنه این پدیده رخ میده. به دلیل کم بودن سرعت هواپیما بالها نمیتونن نیروی برا تولید کنن و هواپیما به پایین میره. این حالت خیلی خطرناکه چون فضای کافی برای بازگشت به حالت عادی نیست و هواپیما رو به زمین کنترل نمیشه. اول این واماندگی از پایینهای هواپیما شروع میشه و بعد به جلو حرکت میکنه.
۲. واماندگی دورانی: این حالت وقتی رخ میده که جریان هوا درون کمپرسور هواپیما چرخشی بشه. این اختلال باعث کمکاری کمپرسور میشه ولی کاملاً تولید هوا رو متوقف نمیکنه. این حالت معمولاً وقتی کمپرسور با سرعت کم دورانی هست رخ میده و میتونه یا به صورت آهسته و پیشرونده یا ناگهانی اتفاق بیفته.
واماندگی به دلیل بالا بودن زاویه حمله یه چیز دیگه است که تو هواپیماها اتفاق میافته. وقتی زاویه حمله سریع بالا بره هواپیما دیگه نمیتونه جلوی جریان هوا رو بگیره و جریان هوا از سطح جدا میشه. اینجاست که هواپیما دیگه نمیتونه درست حرکت کنه و ممکنه به سمت زمین بره.
یه نوع واماندگی که مربوط به زاویه حمله هست واماندگی سرچکشی نام داره. واماندگی سرچکشی وقتی اتفاق میافته که هواپیما با زاویه خیلی تند بالا بره و موتور کم توانی داشته باشه. این واماندگی همراه با حرکت شدید و سریع در جهت انحراف از محور به سمت عمودی (Yaw axis) است و بعد از اون هواپیما وارد وضعیت شیرجه میشه و سقوط میکنه.
اکثر موتورهای توربین گاز چه تو نیروگاهها و چه تو هواپیماها از کمپرسورهای جریان محوری استفاده میکنند که هوا رو به داخل میکشن و فشرده میکنن. این کمپرسورها شامل مراحل مختلفی هستن که هر مرحله تیغههای روتوری داره که بر روی یه دیسک چرخان (یا درام) نصب شدن و تیغههای استاتوری که ثابت هستن. تیغههای روتوری مانند بالهای کوچکی هستن که حرکت هوا رو تسریع میدهن و فشار استاتیک و انرژی حرکتی رو افزایش میدهن. استاتورها هم برای فشرده کردن هوا سرعت رو به فشار تبدیل میکنن. تیغهها و استاتورها جریان هوا رو تعدیل میکنن تا فشار استاتیک رو در جهت جریان افزایش بدن اما اگر شیب بیشتر از حد باشه جریان هوا از دست میره. این شکل از واماندگی به دلیل یه شکست در جریان هوا اتفاق میافته که باعث افزایش سرعت میشه و جریان هوا رو کلا تغییر میده.
وقتی زاویه ورودی هوا بالا میره تیغههای کمپرسور میتونن نتونن جریان هوا رو به درستی جمع کنن و هوایی که به تیغهها میرسه به جای روی سطح تیغه جریان میکنه. وقتی این اتفاق میافته تیغهها میتونن متوقف بشن.
وقتی استال ایجاد میشه عملکرد یک مرحله از کمپرسور رو برای هوا فشرده کردن کاهش میده و تیغهها هم بیشتر بالا نمیرن و این باعث میشه که فشار مناسب به دست نیاد. افزایش زاویه ورودی هوا ممکنه به خاطر اختلال در جریان هوا بالادست یا فشار ناگهانی کمپرسور اتفاق بیوفته که باعث کاهش سرعت هوا میشه اغلب به علت بسته شدن مسیر احتراق یا توربین. مشکلات دیگهای مثل زبری سطح تیغه و نشت زیاد از نوک هم میتونن به جداسازی لایه مرزی منجر بشن. وقتی یک تیغه از جای خود برمیاد میتونه بلاک کنه و جریان هوا رو به سمت مراحل بعدی تغییر بده. این مشکل میتونه به ایجاد واماندگی در هواپیما منجر بشه که باعث میشه که جریان هوا نسبت به مراحل نزدیکش رو به جهت مخالف چرخش کمپرسور منحرف بشه. اگه زاویه تغییر بزرگی بده تیغهها ممکنه متوقف بشن و سلولی به نام "سلول اصطبل" ایجاد بشه. جریان میانگین هوا از طریق کمپرسور وقتی این اتفاق میافته متوقف میشه پس کمپرسور هنوز کار میکنه اما با کارایی کمتر.
اگه سلول اصطبل حرکت کنه یه "اصطبل چرخان" ایجاد میکنه که البته مخالف چرخش کمپرسور با سرعت پایینتری میچرخه. این جریان مختل باعث افزایش تنش و لرزش تیغهها میشه که میتونه به کوتاه شدن عمر تیغهها بیانجامه. این "اصطبل چرخان" ممکنه به شکل یک موج تبدیل بشه که این حالت خرابی جدی برای کمپرسوره.
تیغههای کمپرسور مثل ایروفیلها عمل میکنن و بر اساس اصول آیرودینامیک کار میکنن پس هنگامی که یک مرحله از کمپرسور متوقف میشه توانایی کمپرسور برای فشرده کردن هوا رو کاهش میده.
۱. واماندگی سرعت پایین: وقتی هواپیما داره نشستن یا برخاستن میکنه این پدیده رخ میده. به دلیل کم بودن سرعت هواپیما بالها نمیتونن نیروی برا تولید کنن و هواپیما به پایین میره. این حالت خیلی خطرناکه چون فضای کافی برای بازگشت به حالت عادی نیست و هواپیما رو به زمین کنترل نمیشه. اول این واماندگی از پایینهای هواپیما شروع میشه و بعد به جلو حرکت میکنه.
۲. واماندگی دورانی: این حالت وقتی رخ میده که جریان هوا درون کمپرسور هواپیما چرخشی بشه. این اختلال باعث کمکاری کمپرسور میشه ولی کاملاً تولید هوا رو متوقف نمیکنه. این حالت معمولاً وقتی کمپرسور با سرعت کم دورانی هست رخ میده و میتونه یا به صورت آهسته و پیشرونده یا ناگهانی اتفاق بیفته.
واماندگی به دلیل بالا بودن زاویه حمله یه چیز دیگه است که تو هواپیماها اتفاق میافته. وقتی زاویه حمله سریع بالا بره هواپیما دیگه نمیتونه جلوی جریان هوا رو بگیره و جریان هوا از سطح جدا میشه. اینجاست که هواپیما دیگه نمیتونه درست حرکت کنه و ممکنه به سمت زمین بره.
یه نوع واماندگی که مربوط به زاویه حمله هست واماندگی سرچکشی نام داره. واماندگی سرچکشی وقتی اتفاق میافته که هواپیما با زاویه خیلی تند بالا بره و موتور کم توانی داشته باشه. این واماندگی همراه با حرکت شدید و سریع در جهت انحراف از محور به سمت عمودی (Yaw axis) است و بعد از اون هواپیما وارد وضعیت شیرجه میشه و سقوط میکنه.
اکثر موتورهای توربین گاز چه تو نیروگاهها و چه تو هواپیماها از کمپرسورهای جریان محوری استفاده میکنند که هوا رو به داخل میکشن و فشرده میکنن. این کمپرسورها شامل مراحل مختلفی هستن که هر مرحله تیغههای روتوری داره که بر روی یه دیسک چرخان (یا درام) نصب شدن و تیغههای استاتوری که ثابت هستن. تیغههای روتوری مانند بالهای کوچکی هستن که حرکت هوا رو تسریع میدهن و فشار استاتیک و انرژی حرکتی رو افزایش میدهن. استاتورها هم برای فشرده کردن هوا سرعت رو به فشار تبدیل میکنن. تیغهها و استاتورها جریان هوا رو تعدیل میکنن تا فشار استاتیک رو در جهت جریان افزایش بدن اما اگر شیب بیشتر از حد باشه جریان هوا از دست میره. این شکل از واماندگی به دلیل یه شکست در جریان هوا اتفاق میافته که باعث افزایش سرعت میشه و جریان هوا رو کلا تغییر میده.
وقتی زاویه ورودی هوا بالا میره تیغههای کمپرسور میتونن نتونن جریان هوا رو به درستی جمع کنن و هوایی که به تیغهها میرسه به جای روی سطح تیغه جریان میکنه. وقتی این اتفاق میافته تیغهها میتونن متوقف بشن.
وقتی استال ایجاد میشه عملکرد یک مرحله از کمپرسور رو برای هوا فشرده کردن کاهش میده و تیغهها هم بیشتر بالا نمیرن و این باعث میشه که فشار مناسب به دست نیاد. افزایش زاویه ورودی هوا ممکنه به خاطر اختلال در جریان هوا بالادست یا فشار ناگهانی کمپرسور اتفاق بیوفته که باعث کاهش سرعت هوا میشه اغلب به علت بسته شدن مسیر احتراق یا توربین. مشکلات دیگهای مثل زبری سطح تیغه و نشت زیاد از نوک هم میتونن به جداسازی لایه مرزی منجر بشن. وقتی یک تیغه از جای خود برمیاد میتونه بلاک کنه و جریان هوا رو به سمت مراحل بعدی تغییر بده. این مشکل میتونه به ایجاد واماندگی در هواپیما منجر بشه که باعث میشه که جریان هوا نسبت به مراحل نزدیکش رو به جهت مخالف چرخش کمپرسور منحرف بشه. اگه زاویه تغییر بزرگی بده تیغهها ممکنه متوقف بشن و سلولی به نام "سلول اصطبل" ایجاد بشه. جریان میانگین هوا از طریق کمپرسور وقتی این اتفاق میافته متوقف میشه پس کمپرسور هنوز کار میکنه اما با کارایی کمتر.
اگه سلول اصطبل حرکت کنه یه "اصطبل چرخان" ایجاد میکنه که البته مخالف چرخش کمپرسور با سرعت پایینتری میچرخه. این جریان مختل باعث افزایش تنش و لرزش تیغهها میشه که میتونه به کوتاه شدن عمر تیغهها بیانجامه. این "اصطبل چرخان" ممکنه به شکل یک موج تبدیل بشه که این حالت خرابی جدی برای کمپرسوره.
تیغههای کمپرسور مثل ایروفیلها عمل میکنن و بر اساس اصول آیرودینامیک کار میکنن پس هنگامی که یک مرحله از کمپرسور متوقف میشه توانایی کمپرسور برای فشرده کردن هوا رو کاهش میده.
-
rohamavation
نام: roham hesami radرهام حسامی راد
محل اقامت: 100 مایلی شمال لندن جاده آیلستون، لستر، لسترشر. LE2
عضویت : سهشنبه ۱۳۹۹/۸/۲۰ - ۰۸:۳۴
پست: 3291-
سپاس: 5494
- جنسیت:
تماس:
Re: هوافضا
stalling or stall in airplanes has two states:
1. low-speed stall: this phenomenon occurs when the airplane is either taking off or landing. due to the low speed of the airplane the wings cannot generate enough lift and the airplane descends. this condition is very dangerous because there is not enough space to return to normal and the airplane becomes uncontrollable. stall begins from the lower parts of the airplane and then moves forward.
2. rotational stall: this occurs when the airflow within the airplane's compressor becomes rotational. this disruption reduces the compressor's efficiency but does not completely stop airflow. this usually happens when the compressor is rotating at a low speed and can occur either gradually or suddenly. stalling due to an increased angle of attack is another phenomenon that occurs in airplanes. when the angle of attack increases rapidly the airplane can no longer catch the airflow and the airflow separates from the surface. here the airplane can no longer move properly and may descend towards the ground. a type of stall related to the angle of attack is called a compressor stall. compressor stall occurs when the airplane pitches up sharply and the engine has low power. this stall is accompanied by a rapid and severe movement in the direction of yaw and after that the airplane enters a spin and crashes. most gas turbine engines whether in power plants or airplanes use axial flow compressors that draw in and compress air. these compressors consist of different stages each stage having rotor blades mounted on a rotating disk (or drum) and stator blades that are stationary. the rotor blades act like small wings that accelerate airflow and increase static pressure and kinetic energy. the stators are used to convert speed to pressure. the blades and stators modify the airflow to increase static pressure in the direction of flow but if the slope is too steep the airflow is lost. this type of stall occurs due to a disruption in airflow that increases speed and completely changes the airflow. when the inlet angle of airflow increases the compressor blades cannot properly capture the airflow and the air that reaches the blades flows off the blade surface. when this happens the blades can stop. when stall occurs the performance of a compressor stage decreases in compressing air and the blades do not rise higher causing inadequate pressure. an increase in the inlet angle of airflow may occur due to upstream airflow disturbance or sudden compressor pressure drop resulting in reduced airflow speed usually due to combustion chamber or turbine blockage. other problems such as blade surface roughness and excessive tip leakage can also lead to boundary layer separation. when a blade comes off it can block and redirect airflow towards the next stages. this problem can lead to airflow deviation from the near stages in the opposite direction of compressor rotation. if the angle change is significant the blades may stop and a stall cell called a "stall cell" is created. when this happens the average airflow through the compressor stops so the compressor still works but with reduced efficiency. if the stall cell moves it creates a "rotating stall" which however rotates at a lower speed than the compressor rotation. this different flow causes increased stress and vibration of the blades which can lead to shortened blade life. this "rotating stall" can turn into a wave shape which is a serious compressor failure. compressor blades work like airfoils and operate based on aerodynamic principles so when one stage of the compressor stops the compressor's ability to compress air decreases.
1. low-speed stall: this phenomenon occurs when the airplane is either taking off or landing. due to the low speed of the airplane the wings cannot generate enough lift and the airplane descends. this condition is very dangerous because there is not enough space to return to normal and the airplane becomes uncontrollable. stall begins from the lower parts of the airplane and then moves forward.
2. rotational stall: this occurs when the airflow within the airplane's compressor becomes rotational. this disruption reduces the compressor's efficiency but does not completely stop airflow. this usually happens when the compressor is rotating at a low speed and can occur either gradually or suddenly. stalling due to an increased angle of attack is another phenomenon that occurs in airplanes. when the angle of attack increases rapidly the airplane can no longer catch the airflow and the airflow separates from the surface. here the airplane can no longer move properly and may descend towards the ground. a type of stall related to the angle of attack is called a compressor stall. compressor stall occurs when the airplane pitches up sharply and the engine has low power. this stall is accompanied by a rapid and severe movement in the direction of yaw and after that the airplane enters a spin and crashes. most gas turbine engines whether in power plants or airplanes use axial flow compressors that draw in and compress air. these compressors consist of different stages each stage having rotor blades mounted on a rotating disk (or drum) and stator blades that are stationary. the rotor blades act like small wings that accelerate airflow and increase static pressure and kinetic energy. the stators are used to convert speed to pressure. the blades and stators modify the airflow to increase static pressure in the direction of flow but if the slope is too steep the airflow is lost. this type of stall occurs due to a disruption in airflow that increases speed and completely changes the airflow. when the inlet angle of airflow increases the compressor blades cannot properly capture the airflow and the air that reaches the blades flows off the blade surface. when this happens the blades can stop. when stall occurs the performance of a compressor stage decreases in compressing air and the blades do not rise higher causing inadequate pressure. an increase in the inlet angle of airflow may occur due to upstream airflow disturbance or sudden compressor pressure drop resulting in reduced airflow speed usually due to combustion chamber or turbine blockage. other problems such as blade surface roughness and excessive tip leakage can also lead to boundary layer separation. when a blade comes off it can block and redirect airflow towards the next stages. this problem can lead to airflow deviation from the near stages in the opposite direction of compressor rotation. if the angle change is significant the blades may stop and a stall cell called a "stall cell" is created. when this happens the average airflow through the compressor stops so the compressor still works but with reduced efficiency. if the stall cell moves it creates a "rotating stall" which however rotates at a lower speed than the compressor rotation. this different flow causes increased stress and vibration of the blades which can lead to shortened blade life. this "rotating stall" can turn into a wave shape which is a serious compressor failure. compressor blades work like airfoils and operate based on aerodynamic principles so when one stage of the compressor stops the compressor's ability to compress air decreases.
-
rohamavation
نام: roham hesami radرهام حسامی راد
محل اقامت: 100 مایلی شمال لندن جاده آیلستون، لستر، لسترشر. LE2
عضویت : سهشنبه ۱۳۹۹/۸/۲۰ - ۰۸:۳۴
پست: 3291-
سپاس: 5494
- جنسیت:
تماس:
Re: هوافضا
واماندگی هواپیما:
وقتی هواپیما دیگه نمیتونه نیروی برا (لیفت) رو بسازه و نیروی وزن هواپیماشش اونو به پایین میکشه واماندگی هواپیما رخ میده. این واماندگی دو حالت اصلی داره: سرعت پایین و بالا بودن زاویه حمله. وقتی سرعت پایینه معمولاً وقتی هواپیما داره نشستن یا بالا میره این واماندگی رخ میده و خیلی خطرناکه. وقتی هم زاویه حمله بیشتر از حد مجازه واماندگی به دلیل زاویهٔ زیاد حمله به جریان هوا رخ میده و میتونه باعث از دست دادن کنترل هواپیما بشه. یکی از انواع واماندگی که به زاویه حمله مربوطه واماندگی سرچکشیه که خیلی خطرناک و مهمه.
واماندگی کمپرسور:
واماندگی کمپرسور تو موتورهای جت و توربوشارژرها رخ میده. این پدیده اختلالی در جریان هوا تو داخل کمپرسوره که باعث کم شدن کاراییش و گاهاً میتونه جریان هوا رو کاملا از کمپرسور قطع کنه. واماندگی کمپرسور دو نوعه: استال (Stall) و واماندگی چرخشی (Rotating stall). تو واماندگی چرخشی کارایی کمپرسور کم میشه ولی جریان هوا کاملاً قطع نمیشه.
بیشتر موتورهای توربین گاز هم در نیروگاهها و هم در موتورهای جت هواپیما از کمپرسورهای جریان محوری استفاده میکنند تا به فشردهسازی مورد نیاز برسن. این کمپرسورها از مراحل مختلفی تشکیل شدن هر مرحله شامل یک حلقه از تیغههای روتوری که در دیسک چرخان (یا درام) قرار دارن و یک حلقه پایین دست از تیغههای روتور ثابت که در مقابل استاتور موجودن. تیغههای روتوری مانند بالهای کوچکی هستند که سرعت جریان هوا رو افزایش میدهن فشار استاتیک و انرژی جنبشیش رو بالا میبرن. استاتورها برای فشردهسازی هوا سرعت رو به فشار تبدیل میکنن و بیشتر فشار استاتیک رو افزایش میدن انرژی جنبشی رو کاهش میدهن و سرعت چرخشی که تیغههای روتور میتونن ایجاد کنن رو کاهش میدن و جریان هوا رو برای ورود به مرحله بعدی تنظیم میکنن.
تیغهها و استاتورهای کمپرسور بعدا جریان هوا رو تعدیل میکنن تا فشار استاتیک رو در جهت جریان افزایش بدن که کمی شبیه به فشار دادن آب به یک کانال مایل با بسیاری از ضربات کوچک و سریعه. اگر شیب (مشابه نسبت فشار کمپرسور) بیشتر از حد شیب دار باشه آب به سمت پایین شیب حرکت میکنه. برعکس مسیر جریان هوا در جهت محوری فشار استاتیک رو کاهش میده و به نظر میرسه آب از یک کانال شیب دار پایین میره.
استال یا شکست جریان هوا از طریق یک موتور اتفاق میافته. این یک وضعیت پیشرونده است که میتونه منجر به افزایش سرعت بشه که تجزیه کلی جریان هوا در موتوره. در موارد شدید افزایش جریان میتونه منجر به تغییر جهت جریان هوا شه.
هنگامی که زاویه ورودی هوا افزایش مییابه از جهت محوری اندازهگیری میشه میتونه جداسازی لایههای مرزی تیغه رو انجام بده و جریانهای سمت مکش تیغه سطح تیغه رو از نقطه جدایی لایه مرزی دنبال نمیکنن. وقتی این اتفاق افتاد تیغه کمپرسور متوقف میشه
تیغههای کمپرسور تو موتورهای جت و فنهای توربو خیلی مهمن. اینا مثل بال یا پروانهها عمل میکنن فقط توی کمپرسور. این تیغهها یه زاویهای دارن که باعث فشرده شدن هوا میشه و به مراحل بعدی اون رو میفرسته. ولی وقتی یه غرفه کمپرسور میفته جریان هوا قطع میشه و فشار تو کمپرسور به طور ناگهانی بالا میره.
این باعث میشه هوا که جاریه توی کمپرسور کند یا متوقف بشه. اینجوری که شاید یه صدای عجیبی هم باشه از هر دو سمت موتور و حتی از دمای اون هم برمیاد. اگه این اتفاق بزرگ باشه فشار هوا کم میشه و میتونه باعث بیاکسیژن شدن هوا برای احتراق بشه.
تیغهها وقتی دور میشن ممکنه به هوای اطرافشون برخورد کنن. اگه جریان هوای روکش بزرگ باشه ممکنه توانایی تیغهها رو برای چرخش کامل رو نداشته باشه. اون موقع این تیغهها به اصطبل چرخشی معروفن.
وقتی یه غرفه بزرگ بشه توانایی مرحله فن برای فشرده کردن هوا و ارسالش به مراحل بعدی مختل میشه. این باعث ایجاد افت ناگهانی فشار در کمپرسور و کاهش اکسیژن برای احتراق میشه. عملکرد موتور هم تحت تأثیر قرار میگیره و ممکنه به خرابی برسه.
استال کمپرسور یکی از اتفاقات بحرانیه که میتونه باعث از کار افتادن ناگهانی موتورهای گازی بشه. بررسیها نشون داده که شش عامل مهم برای بروز این اتفاق وجود دارن:
اختلال در جریان هوا: وقتی که جریان هوا به موتور وارد میشه عموماً باید یکنواخت باشه. اما اگه این جریان از حالت عادی خارج بشه احتمال استال کمپرسور بالاتر میره.
عوامل مختلف اختلال: میتونه عوامل مختلفی مثل ورود جسم خارجی (مثل پرنده) به داخل موتور وجود قطعات قدیمی و خراب شده درون موتور یخ زدگی در جریان هوا خرابی در طراحی موتور و یا استفاده نادرست از موتور باعث اختلال در جریان هوا میشن.
جدایی جریان هوا و استال: اگه جریان هوا از تیغهها جدا بشه و در زاویه حد بحرانی تیغهها قرار بگیره استال ایجاد میشه. این باعث میشه که جریان هوای غیر قابل پیشبینی به داخل موتور برسه.
ورود جریان هوای غیر قابل پیشبینی: وقتی که جریان هوای غیر قابل پیشبینی وارد موتور میشه باعث ایجاد اختلال در نرخ ورود هوا به موتور میشه که این موضوع استال رو بیشتر میکنه.
مشاهده شعله: وقتی که جریان هوا قطع میشه ممکنه میزان سوخت نسبت به هوا افزایش پیدا کنه و به طور ناگهانی شعلهای دیده بشه. این نشانهای از افزایش سوخت است.
تأثیرات استال کمپرسور: این مشکل میتونه به سادگی باعث نقص در عملکرد کمپرسور یا موتور بشه که از اهمیت بالایی برخورداره.
توی حوزهی سیالات پویا (دینامیکی) استال یا همون واماندگی یک پدیده مهمه. وقتی ضریب نیروی بالابرنده یا لیفت به دلیل افزایش زاویه حمله یاAngle of Attack توسط مقطع آیرودینامیکی بال یا Airfoil کم میشه این پدیده رخ میده.
واماندگی زمانی اتفاق میوفته که زاویه بحرانی حمله از مقطع آیرودینامیکی بال خارج میشه. به عبارت دیگه وقتی زاویه حمله بیشتر از حد بحرانی برای مقطع آیرودینامیکی بال افزایش پیدا میکنه واماندگی رخ میده.معمولاً زاویه بحرانی حمله به 15 درجه تخمین زده میشه اما باید توجه داشت که این مقدار برای هر نوع هواپیما ممکنه متفاوت باشه و به فاکتورهایی مثل طراحی مقطع آیرودینامیکی بال و عدد رینالدز وابستهه.
در سالهای اخیر برای جلوگیری از واماندگی در هواپیماهای همراه با سرنشین و بدون سرنشین از نیروی محوری جلو برنده استفاده میشه.
واماندگی معمولاً در شرایط پروازی هواپیما اتفاق میوفته و میتونه مشکلاتی در پرواز ایجاد کنه. این موضوع در علم مکانیک نیز مورد بررسی قرار میگیره و در هوانوردی به اهمیت ویژهای برخورداره.
وقتی هواپیما دیگه نمیتونه نیروی برا (لیفت) رو بسازه و نیروی وزن هواپیماشش اونو به پایین میکشه واماندگی هواپیما رخ میده. این واماندگی دو حالت اصلی داره: سرعت پایین و بالا بودن زاویه حمله. وقتی سرعت پایینه معمولاً وقتی هواپیما داره نشستن یا بالا میره این واماندگی رخ میده و خیلی خطرناکه. وقتی هم زاویه حمله بیشتر از حد مجازه واماندگی به دلیل زاویهٔ زیاد حمله به جریان هوا رخ میده و میتونه باعث از دست دادن کنترل هواپیما بشه. یکی از انواع واماندگی که به زاویه حمله مربوطه واماندگی سرچکشیه که خیلی خطرناک و مهمه.
واماندگی کمپرسور:
واماندگی کمپرسور تو موتورهای جت و توربوشارژرها رخ میده. این پدیده اختلالی در جریان هوا تو داخل کمپرسوره که باعث کم شدن کاراییش و گاهاً میتونه جریان هوا رو کاملا از کمپرسور قطع کنه. واماندگی کمپرسور دو نوعه: استال (Stall) و واماندگی چرخشی (Rotating stall). تو واماندگی چرخشی کارایی کمپرسور کم میشه ولی جریان هوا کاملاً قطع نمیشه.
بیشتر موتورهای توربین گاز هم در نیروگاهها و هم در موتورهای جت هواپیما از کمپرسورهای جریان محوری استفاده میکنند تا به فشردهسازی مورد نیاز برسن. این کمپرسورها از مراحل مختلفی تشکیل شدن هر مرحله شامل یک حلقه از تیغههای روتوری که در دیسک چرخان (یا درام) قرار دارن و یک حلقه پایین دست از تیغههای روتور ثابت که در مقابل استاتور موجودن. تیغههای روتوری مانند بالهای کوچکی هستند که سرعت جریان هوا رو افزایش میدهن فشار استاتیک و انرژی جنبشیش رو بالا میبرن. استاتورها برای فشردهسازی هوا سرعت رو به فشار تبدیل میکنن و بیشتر فشار استاتیک رو افزایش میدن انرژی جنبشی رو کاهش میدهن و سرعت چرخشی که تیغههای روتور میتونن ایجاد کنن رو کاهش میدن و جریان هوا رو برای ورود به مرحله بعدی تنظیم میکنن.
تیغهها و استاتورهای کمپرسور بعدا جریان هوا رو تعدیل میکنن تا فشار استاتیک رو در جهت جریان افزایش بدن که کمی شبیه به فشار دادن آب به یک کانال مایل با بسیاری از ضربات کوچک و سریعه. اگر شیب (مشابه نسبت فشار کمپرسور) بیشتر از حد شیب دار باشه آب به سمت پایین شیب حرکت میکنه. برعکس مسیر جریان هوا در جهت محوری فشار استاتیک رو کاهش میده و به نظر میرسه آب از یک کانال شیب دار پایین میره.
استال یا شکست جریان هوا از طریق یک موتور اتفاق میافته. این یک وضعیت پیشرونده است که میتونه منجر به افزایش سرعت بشه که تجزیه کلی جریان هوا در موتوره. در موارد شدید افزایش جریان میتونه منجر به تغییر جهت جریان هوا شه.
هنگامی که زاویه ورودی هوا افزایش مییابه از جهت محوری اندازهگیری میشه میتونه جداسازی لایههای مرزی تیغه رو انجام بده و جریانهای سمت مکش تیغه سطح تیغه رو از نقطه جدایی لایه مرزی دنبال نمیکنن. وقتی این اتفاق افتاد تیغه کمپرسور متوقف میشه
تیغههای کمپرسور تو موتورهای جت و فنهای توربو خیلی مهمن. اینا مثل بال یا پروانهها عمل میکنن فقط توی کمپرسور. این تیغهها یه زاویهای دارن که باعث فشرده شدن هوا میشه و به مراحل بعدی اون رو میفرسته. ولی وقتی یه غرفه کمپرسور میفته جریان هوا قطع میشه و فشار تو کمپرسور به طور ناگهانی بالا میره.
این باعث میشه هوا که جاریه توی کمپرسور کند یا متوقف بشه. اینجوری که شاید یه صدای عجیبی هم باشه از هر دو سمت موتور و حتی از دمای اون هم برمیاد. اگه این اتفاق بزرگ باشه فشار هوا کم میشه و میتونه باعث بیاکسیژن شدن هوا برای احتراق بشه.
تیغهها وقتی دور میشن ممکنه به هوای اطرافشون برخورد کنن. اگه جریان هوای روکش بزرگ باشه ممکنه توانایی تیغهها رو برای چرخش کامل رو نداشته باشه. اون موقع این تیغهها به اصطبل چرخشی معروفن.
وقتی یه غرفه بزرگ بشه توانایی مرحله فن برای فشرده کردن هوا و ارسالش به مراحل بعدی مختل میشه. این باعث ایجاد افت ناگهانی فشار در کمپرسور و کاهش اکسیژن برای احتراق میشه. عملکرد موتور هم تحت تأثیر قرار میگیره و ممکنه به خرابی برسه.
استال کمپرسور یکی از اتفاقات بحرانیه که میتونه باعث از کار افتادن ناگهانی موتورهای گازی بشه. بررسیها نشون داده که شش عامل مهم برای بروز این اتفاق وجود دارن:
اختلال در جریان هوا: وقتی که جریان هوا به موتور وارد میشه عموماً باید یکنواخت باشه. اما اگه این جریان از حالت عادی خارج بشه احتمال استال کمپرسور بالاتر میره.
عوامل مختلف اختلال: میتونه عوامل مختلفی مثل ورود جسم خارجی (مثل پرنده) به داخل موتور وجود قطعات قدیمی و خراب شده درون موتور یخ زدگی در جریان هوا خرابی در طراحی موتور و یا استفاده نادرست از موتور باعث اختلال در جریان هوا میشن.
جدایی جریان هوا و استال: اگه جریان هوا از تیغهها جدا بشه و در زاویه حد بحرانی تیغهها قرار بگیره استال ایجاد میشه. این باعث میشه که جریان هوای غیر قابل پیشبینی به داخل موتور برسه.
ورود جریان هوای غیر قابل پیشبینی: وقتی که جریان هوای غیر قابل پیشبینی وارد موتور میشه باعث ایجاد اختلال در نرخ ورود هوا به موتور میشه که این موضوع استال رو بیشتر میکنه.
مشاهده شعله: وقتی که جریان هوا قطع میشه ممکنه میزان سوخت نسبت به هوا افزایش پیدا کنه و به طور ناگهانی شعلهای دیده بشه. این نشانهای از افزایش سوخت است.
تأثیرات استال کمپرسور: این مشکل میتونه به سادگی باعث نقص در عملکرد کمپرسور یا موتور بشه که از اهمیت بالایی برخورداره.
توی حوزهی سیالات پویا (دینامیکی) استال یا همون واماندگی یک پدیده مهمه. وقتی ضریب نیروی بالابرنده یا لیفت به دلیل افزایش زاویه حمله یاAngle of Attack توسط مقطع آیرودینامیکی بال یا Airfoil کم میشه این پدیده رخ میده.
واماندگی زمانی اتفاق میوفته که زاویه بحرانی حمله از مقطع آیرودینامیکی بال خارج میشه. به عبارت دیگه وقتی زاویه حمله بیشتر از حد بحرانی برای مقطع آیرودینامیکی بال افزایش پیدا میکنه واماندگی رخ میده.معمولاً زاویه بحرانی حمله به 15 درجه تخمین زده میشه اما باید توجه داشت که این مقدار برای هر نوع هواپیما ممکنه متفاوت باشه و به فاکتورهایی مثل طراحی مقطع آیرودینامیکی بال و عدد رینالدز وابستهه.
در سالهای اخیر برای جلوگیری از واماندگی در هواپیماهای همراه با سرنشین و بدون سرنشین از نیروی محوری جلو برنده استفاده میشه.
واماندگی معمولاً در شرایط پروازی هواپیما اتفاق میوفته و میتونه مشکلاتی در پرواز ایجاد کنه. این موضوع در علم مکانیک نیز مورد بررسی قرار میگیره و در هوانوردی به اهمیت ویژهای برخورداره.
-
rohamavation
نام: roham hesami radرهام حسامی راد
محل اقامت: 100 مایلی شمال لندن جاده آیلستون، لستر، لسترشر. LE2
عضویت : سهشنبه ۱۳۹۹/۸/۲۰ - ۰۸:۳۴
پست: 3291-
سپاس: 5494
- جنسیت:
تماس:
Re: هوافضا
استپر موتور چگونه کار می کند؟ موتورهای پله ای دارای یک شفت دوار مغناطیسی دائمی به نام روتور و آهنرباهای الکتریکی ثابت اطراف روتور به نام استاتور هستند.
استپر موتور ( Stepper Motor ) یا استپ موتور ( Step Motor ) یا موتور پله ای یک موتور براشلس (Brushless ) الکتریکی DC است که یک دور کامل ( ۳۶۰ درجه ) را به تعدادی پله یا استپ مساوی تقسیم می نماید. کنترل موقعیت موتور پله ای برای رفتن به یک پله خاص یا ماندن در آن پله بدون استفاده از سیستم فیدبک می باشد و این نشانه دقت بالای این موتور ها است
. در موتور های DC معمولی ما برای کنترل چرخش شفت نیاز به کنترل لحظه به لحظه و سیستم بازخورد داریم. استپ موتورها معمولا دارای سرعت نسبتا پایینی در حدود 200 الی 300 دور در دقیقه هستند. اما موتورهایی با سرعت 1000 دور در دقیقه هم وجود دارند.
این موتور ها در هر پله یا استپ به میزان خاصی بر حسب درجه دوران می کنند ، به عنوان مثال محور استپ موتور ۲۰۰ استپ در هر استپ ۱/۸ درجه دوران می کنند
موتورهای پلهای معمولاً دارای 50 تا 100 قطب مغناطیس الکترومغناطیس (جفت قطب شمال و جنوب) هستند که توسط یک آهنربای دائمی یا یک جریان الکتریکی تولید میشوند.موتور پلهای یک موتور بدون جاروبک و سنکرون است که حرکت آن به صورت پلهای و گسسته است. در حالت کلی، موتور پلهای در هر پله یا گام به اندازه ۱٫۸ درجه میچرخد و در نتیجه، ۲۰۰ پله را برای چرخش یک دور کامل میپیماید. این نوع موتورها در زاویههای پله ۳۰، ۱۵، ۵، ۲٫۵ و ۲ درجهای نیز موجود هستند. موتورهای پلهای بر اساس اصول الکترومغناطیس کار میکنند و میتوان آنها را بدون فیدبک کنترل کرد. از آنجایی که موقعیت و سرعت این موتورها با کمک سیستمهای کنترل پیشرفته رایانهای به دقت قابل کنترل است، در بسیاری از کاربردهای مرتبط با کنترل دقیق موقعیت، مانند رباتیک، مورد استفاده قرار میگیرند.مانند سایر موتورهای الکتریکی، موتور پلهای یک بخش متحرک به نام روتور (Rotor) و یک بخش ثابت به نام استاتور (Stator) دارد. استاتور و روتور قطبهای مغناطیسی دارند و با انرژیدار کردن قطبهای استاتور، روتور برای تراز شدن با استاتور حرکت میکند. روتور یک قطعه آهن دندانهدار به شکل چرخدهنده است. استاتور نیز از مجموعه آهنرباهای الکتریکی تشکیل شده که در حول محور دندانهدار مرکزی قرار گرفتهاند.وقتی جریان از سیمپیچیهای فاز موتور پلهای عبور کند، شار مغناطیسی در استاتور و عمود بر جهت گذر جریان به وجود میآید. آهنرباها به طور همزمان انرژیدار میشوند. هنگامی که یک آهنربا با کمک یک مدار درایور خارجی یا میکروکنترلر انرژی میگیرد، شفت یا محور روتور طوری میچرخد که نسبت به استاتور در موقعیتی قرار گیرد که کمترین مقاومت را در برابر شار داشته باشد. این بدین معنی است که الکترومگنت (آهنربای الکتریکی) آن دندانههایی از چرخدنده را جذب میکند که نسبت به بقیه آهنرباها انحراف دارند. به همین دلیل، هنگامی که آهنربای بعدی روشن یا برقدار است، آهنربای قبلی خاموش میشود که منجر به جذب دندانههای چرخدهنده توسط آهنربای دوم خواهد شد. بنابراین، چرخش روتور به صورت پلهای خواهد بود و تعداد پلهها عدد صحیحی است که با توجه به زاویه حرکت در هر مرحله تعیین میشود
با کنترل زاویه هر پله، میتوانیم دقت و نرمی چرخش روتورِ موتور را کنترل کنیم. در موتور پلهای، سه مُد یا حالت تحریک وجود دارد که تحریک موتور پلهای
عملکرد پله کامل
در این حالت، روتور در یک مرحله به اندازه زاویه پایه 1٫8 درجه حرکت میکند و بدین ترتیب 200 پله برای اتمام چرخش آن لازم است. میتوانیم این حالت را با انرژیدار کردن فقط یک فاز از سیمپیچهای استاتور یا دو فاز عملی کنیم. عملکرد با یک فاز حداقل توان را از مدار درایور مصرف خواهد کرد. از سوی دیگر، وقتی دو فاز را در یک لحظه انرژیدار میکنیم، گشتاور و سرعت زیاد میشود.
مد تحریک موتور پلهای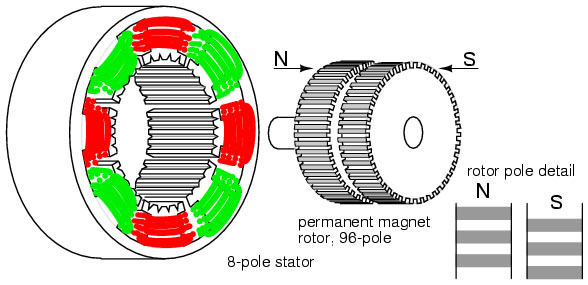
عملکرد نصف پله
در این حالت، روتور به اندازه نصف زاویه پایه یک پله کامل میچرخد و در نتیجه گشتاور نسبت به عملکرد پله کامل بهبود مییابد. همچنین، نرمی و دقت حرکت دو برابر میشود.
عملکرد نصف گام
در عملکرد پله کوچک، زاویه پایه به مقادیر کوچکتر، حتی ۲۵۶ قسمت، تقسیم میشود. وقتی که افزایش نرمی حرکت مورد نظر باشد، عملکرد گام کوچک یا ریز مورد توجه قرار میگیرد.
انواع موتورهای پلهای
سه نوع موتور پلهای وجود داره که در زیر میارم براتون.
موتور پلهای مغناطیس دائم
زاویه پله معمولی یک موتور پلهای با آهنربای مغناطیس دائم 7٫5 تا 15 درجه است. شفت آهنی روتور با تغییر قطب شمال و جنوب در یک خط مستقیم موازی آهنی مغناطیسی میشود که نتیجه آن افزایش شدت شار مغناطیسی است و به همین دلیل گشتاور این نوع موتورها به طور قابل توجهی افزایش مییابد. موتورهای پلهای آهنربای دائم به دلیل مقادیر بالاتر زاویههای پله، رزولوشن یا دقت و نرمی پایینتری دارند. البته این موتورها، موتورهای کمهزینهای هست
هر قطب آهنربای دائمی یک نقطه توقف طبیعی برای شفت موتور ارائه می دهد.
تعداد بیشتر قطب ها به یک موتور پله ای اجازه می دهد تا خود را به طور دقیق و دقیق بین هر یک از قطب ها قرار دهد.
این یکی از ویژگیهای راحت موتور پلهای است، زیرا قطبهای درون یک موتور پلهای اجازه میدهد تا بدون هیچ گونه بازخورد موقعیتی، بهطور دقیق قرار گیرد
به عبارت دیگر در یک سیستم کنترل حلقه باز کار می کند. کنترل حلقه باز اجازه می دهد تا یک پالس الکتریکی از یک کنترل کننده، شفت موتور را از یک قطب به قطب دیگر حرکت دهد و بدون بازخورد موقعیتی به کنترل کننده، در تراز با قطب الکترومغناطیسی متوقف شود.
این یکی از مزایای موتور پله ای است، اما مزایای اضافی استپر موتور در مقاله ای جداگانه مورد بحث قرار خواهد گرفت.
هنگامی که می خواهیم وضوح را افزایش دهیم یا به کوچکترین حرکت چرخشی دست یابیم، طراحی پله حاوی تعداد بیشتری از قطب های مغناطیسی خواهد بود.
اساساً، اندازه پله افزایشی یک موتور پلهای بر اساس تعداد قطبهای آهنربای الکترومغناطیس به درجه خاصی از چرخش ثابت میشود. بنابراین، حرکت به یک موقعیت دقیق صرفاً ارسال تعداد صحیح دستورات پالس است.
موتورهای پله ای ممکن است تا 200 دندانه روتور یا 200-400 پله کامل در هر چرخش شفت موتور داشته باشند.
برای تعیین وضوح چرخش می توانیم کمی ریاضی انجام دهیم. اگر یک موتور پله ای 200 پله افزایشی داشته باشد و بدانیم که چرخش کامل برابر با یک دایره یا 360 درجه است، می توانیم 360 درجه را بر 200 تقسیم کنیم. این معادل 1.8 درجه چرخش زاویه کامل است.
400 پله تقسیم شده به 360 درجه، 0.9 درجه چرخش زاویه کامل گام را فراهم می کند.
خروجی یک پالس دیجیتال از درایور کنترلر معادل یک مرحله چرخش است.
با این افزایش در تعداد قطب های آهنربای الکترومغناطیسی، عملیات اساساً مانند مثال ارائه شده با استفاده از چرخش 90 درجه است، اما اکنون چرخش بیشتر شبیه به 1.8 درجه چرخش است که قبلاً ذکر شد.
در موقعیت 1، روتور در موقعیت بالایی با الکترومغناطیسی استاتور بالایی فعال شده است که نشان دهنده S برای قطبش جنوبی است و در موقعیت 2 استاتور الکترومغناطیس بالایی بدون انرژی است و استاتور مغناطیس الکترومغناطیسی به سمت راست فعال است، روتور در جهت عقربه های ساعت حرکت می کند و با آن هم تراز می شود. این الکترومغناطیس قطبش S جدید را نشان می دهد که امکان حرکت چرخشی دقیق درجه را فراهم می کند.
این تغییر قطبش الکترومغناطیسی به ایجاد چرخش 360 درجه ادامه می دهد. هرچه سرعت eپلاریزاسیون الکترومغناطیسی هر چه سرعت بیشتر باشد اتفاق می افتد.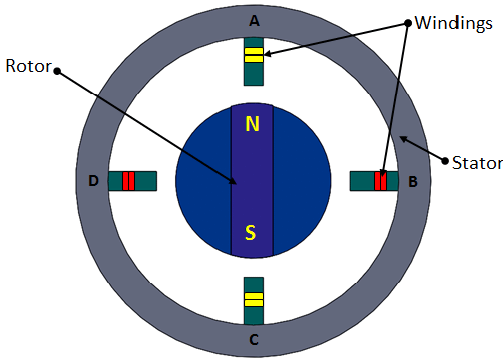
پیش درآمدی بر استپر موتور
موتورهای DC معمولی تنها با یک کلید خاموش و روشن فعالیت می کنند و با وارد کردن ولتاژ شاهد چرخش موتور هستیم، برای برعکس کردن جهت چرخش هم کافیست نحوه اتصال قطب ها را عوض کنیم، اما استپ موتور ها امکان کنترل دقیقتر را به ما می دهند، اما چگونه ؟
ساختار استپ موتور
استپ موتورها دارای 2 بخش اصلی هستند.
روتور
استاتور
روتور : روتور همان سیلندر مرکزی استپ موتور است که روی آن تعدادی استپ قرار گرفته است، در موتور های جریان مستقیم ( موتورهای DC ) معمولی سیم پیچ ها روی روتور قرار دارند و آهنربای دائم روی استاتور تعبیه شده اما در استپ موتور ها، سیم پیچ ها روی استاتور تعبیه شده اند. در واقع در موتور های DC معمولی سیم پیچ ها همراه روتور در چرخش هستند اما در استپ موتورها اینچنین نیست.
استاتور : استاتور قسمت ثابت استپ موتورها هستند که روتور درون آن چرخش می کند، استاتور در این موتور ها دارای سیم پیچ هایی است که به آنها فاز می گوییم، وارد شدن پالس های الکتریکی به این فازها باعث چرخش روتور می شود.
دیاگرام استپر موتور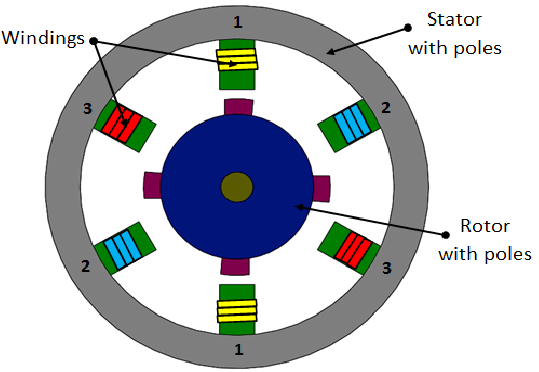
گام استپر موتور
منظور از گام، کوچک ترین چرخش قابل کنترل در استپر موتور است. استپ موتورها بسته به نوع کاربرد با دقت های مختلفی ساخته می شوند. زاویه گام همان زاویه ای است که به ازای هر گام طی می شود.
رابطه بین دور موتور و استپ ها : برای محاسبه تعداد استپ هایی که در یک ثانیه توسط موتور طی می شود باید تعداد دور بر دقیقه را در تعداد استپ های یک دور کامل ضرب کنیم و عدد حاصل را تقسیم بر 60 کنیم.
مثال : برای یک استپر موتور با دور 300 RPM یا 300 دور در دقیقه با تعداد استپ 200، تعداد استپ هایی که در یک ثانیه طی می شود به شکل زیر است :
1000=60/(200*300)
به این شکل می توان به دقت واقعی استپ موتور پی برد، در حالیکه 1000 استپ در ثانیه رد می شود اما ثانیه بعد می توان در یک استپ مشخص، حرکت موتور را به حالت سکون تبدیل کنیم.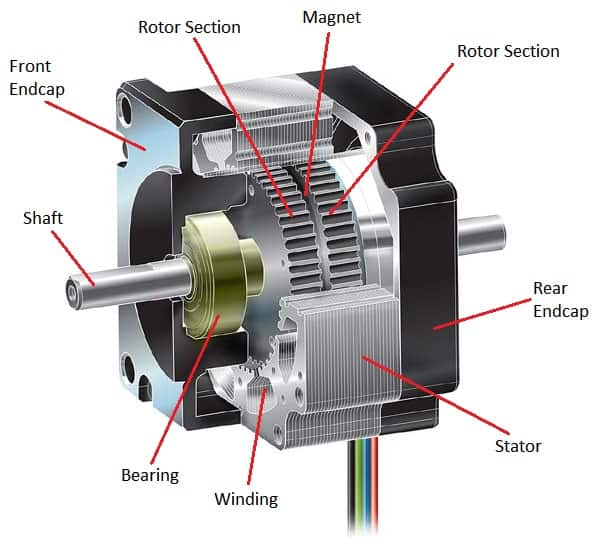
عملکرد استپ موتور
درون استاتورِ استپر موتور تعدادی آهنربای الکتریکی وجود دارد که دارای استپ ( پله/دندانه ) هستند، این آهنرباها توسط سیستم کنترل با ارسال پالس هایی فعال و غیر فعال می شوند. در مرکز موتور روتور وجود دارد. روتور سیلندری آهنی دارای خاصیت مغناطیسی است که روی آن استپ هایی وجود دارد. با ارسال اولین پالس و فعال شدن اولین آهنربای الکتریکی، روتور شروع به چرخش می کند تا استپ های رتور دقیقا روبروی آهنربای الکتریکی فعال قرار بگیرند. در این حالت استپِ روتور با بقیه استپ های استاتور دارای انحرافی کم است. همراه با فعال شدن آهنربای الکتریکی بعدی و غیر فعال شدن آهنربای اول، استپ های روتور با استپ های آهنربای بعدی در یک راستا قرار می گیرند. با ادامه این روند روتور چرخش می کند و ما می توانیم شفت استپر موتور را در زاویه دلخواه قرار بدهیم.
برای مثال یک استپ موتور با درجه 1.8 باید 200 گام را طی کند تا یک دور کامل چرخش داشته باشد.
( 360 = 200 * 1.8 )
عملکرد استپر
و به این ترتیب می توان گفت هر چه تعداد استپ ها بیشتر باشد دقت عملکرد بیشتر می شود. استپ موتورها دارای سیستم کنترل حلقه باز هستند، به این معنی که نیاز به سیستم بازخورد ندارند. نحوه کار سیستم حلقه باز به این شکل است :
سیستم حلقه باز
انواع استپ موتور
مغناطیس دائم : دارای روتوری با آهنربای دائمی هستند و برای تجهیزاتی با سرعت پایین، گشتاور بالا و همچنین زاویه پله بالا مانند 45 یا 90 درجه استفاده می شود.
با مغناطیس متغیر : ساده ترین نوع استپ موتور، که روتور آن دارای خاصیت مغناطیس شونده است. با وارد کردن ولتاژ DC به سیم پیچ های استاتور، استپ های روتور به سمت قطب مغناطیسی ایجاد شده حرکت کرده و باعث چرخش موتور می شوند.
استپر موتور هیبرید : این استپ موتورها ترکیبی از 2 مدل استپ موتورهای بالا هستند، مرکز روتور قطب S و استپ های روتور قطب N است. استپر موتور های هیبریدی دارای 3 درجه استاندارد 0.9 و 1.8 و 3.6 درجه هستند.
استپر موتور هیبرید
استپ موتور ترمزدار : استپر موتور گاهی برای حمل و جابه جایی وزنه یا بار در محور عمودی استفاده می شوند، هنگامی که جریان برق به استپر موتور متصل نیست، ما ممکن است برای نگه داشتن استپ موتور در مکانی ثابت به ترمز نیاز داشته باشیم. برای این مورد استپر موتور ترمزدار پیشنهاد می شود. استپ موتور ترمزدار این قابلیت را ایجاد میکند که هنگامی که جریان برق به استپ موتور متصل نیست هیچ حرکتی انجام نشود و به اصطلاح استپ موتور در حالت قفل باشد.
استپ موتور گیربکس دار : در مواقعی که کاربرد ما به شکلی باشد که نیاز به کنترل دور موتور و گشتاور داشته باشیم از گیربکس برای استپ موتور استفاده میکنیم. عموما برای رسیدن به گشتاور بالا در سرعت های پایین از استپر موتور های گیربکس دار استفاده می شود.
استپر موتور انکودر دار : همانطور که با هم بررسی کردیم، عموما استپ موتورها در سیستم های حلقه باز کنترل می شوند. نحوه کار سیستم حلقه باز به این شکل است که داده ها وارد می شوند، فرآیند انجام می شود و داده ها خارج می شوند و به این شکل ما هیچگونه کنترلی بر موقعیت مکانی نخواهیم داشت. اما در مواقعی ممکن است نیاز به سیستم کنترل حلقه بسته در سرعت های پایین داشته باشیم. این کار با استفاده از استپر موتور معمولی قابل اجرا نیست و همینطور استفاده از سروو موتور به دلیل قیمت بالای آن باعث افزایش هزینه خواهد شد. در این مواقع استفاده از استپ موتور انکودر دار بسیار مقرون به صرفه خواهد بود.
استپر موتور ضد آب : انواعی از استپ موتور وجود دارند که دارای استاندارد ضد آب IP65 هستند. این استاندارد به استپر موتور این قابلیت را می دهد که در مقابل پاشش آب از هر زاویه ای مقاومت داشته باشد. به یاد داشته باشید این استاندارد به این معنا نیست که بتوان استپ موتور را زیر آب استفاده کرد، بلکه در مواقعی که ممکن است استپ موتور در معرض پاشش آب قرار گیرد از استپ موتور ضد آب استفاده می شود.
استپر موتور
انواع استپ موتور بر اساس شفت :
استپ موتور ها دارای شفت های مختلفی هستند که با توجه به نوع کاربرد باید استپر موتور با شفت مناسب را انتخاب کنیم. شفت در استپ موتور ها به 3 شکل زیر وجود دارند.
شفت دی شکل یا راند (D or Round ) : شفت های راند در سایز های مختلف موجود هستند. این شفت ها دارای یک سمت صاف و یک سمت بشکل D هستند و برای جلوگیری از لیز خوردن استفاده می شوند، در مواقعی که گشتاور بالا نیاز باشد از این شفت ها بخوبی میتوان استفاده کرد.
شفت دارای دنده : این شفت ها درای دندانه هایی هستند که برای وارد آوردن فشار بیشتر هنگام چرخش استفاده می شوند.
شفت لید اسکرو : شفت های لید اسکرو برای عملکرد های خطی بکار می روند، در تجهیزاتی که نیاز است هدی که اطلاعات را میخواند جابجا شود از این شفت استفاده می شود. برای مثال در دستگاهی مثل هارد درایو برای جابجایی هدی که روی دیسک مغناطیسی وجود دارد از شفت لید اسکرو مینیاتوری استفاده می شود.
شفت استپ موتور
انواع سیم پیچی استپر موتور
تک قطبی : مورد استفاده ترین استپر موتور تک قطبی دارای 4 سیم پیچِ استاتور است. این 4 سیم پیچ بصورت 2 به 2 با هم زوج هستن و دارای یک سر وسط مشترک هستند. در این نوع از استپر موتورها، از سیم پیچ ها در یک جهت جریان عبور داده می شود و به همین دلیل به نام استپر موتور 4 فاز یا تک قطبی شناخته می شوند. استپر موتور تک قطبی دارای 5 یا 6 سیم است و عموما با درجه حرکت 3.6 یا 7.5 ساخته می شوند.
دو قطبی : در استپر موتور 2 قطبی، هر سیم پیچ می تواند از 2 طرف برق دار شود. هر سیم پیچ در استپ موتور 2 قطبی به یک منبع تغذیه معکوس شونده نیاز دارد. استپر موتورهای 2 قطبی از انواع تک قطبی قدرت بیشتری دارند و به همین دلیل در طراحی هایی که فضا محدودتر است استفاده می شوند.
تک قطبی و دو قطبی
فاز در استپ موتور
منظور از قطب در استپر موتور همان قطب های آهنربا هستند. در استپر موتورها ممکن است تعداد مختلفی سیم پیچ وجود داشته باشد. اما این سیم پیچ ها بشکل گروه هایی به نام فاز با هم در ارتباط هستند. تمامی سیم پیچ های یک فاز با یکدیگر شروع بکار میکنند. استپ موتور ها عموما دارای 2 فاز هستند، اما استپر موتورهای 3 فاز و 5 فاز هم موجود هستند. بعضی اوقات استپ موتور تک قطبی به اسم استپ موتور 4 فاز شناخته می شود، در حالیکه در واقع 2 فاز دارد.
زاویه گام = 360 ÷ ( تعداد قطب ها به ازای هر فاز * تعداد فازها ) = 360 ÷ تعداد کل فازها
سیم بندی در استپر موتور
یک استپ موتور 2 قطبیِ 2 فاز دارای 2 گروه سیم پیچ است، استپ موتور 2 قطبیِ 2 فاز دارای 4 سیم است که هر گروه از سیم پیچی ها دارای 2 سیم است. یک موتور 4 فاز تک قطبی دارای 4 سیم پیچ است. بعضی از استپ موتورها دارای سیم بندی انعطاف پذیر هستند که این اجازه را به ما می دهد که استپ موتور را به هم بصورت تک قطبی و هم 2 قطبی راه اندازی کنیم.
استپر موتورها با توجه به تک قطبی یا 2 قطبی بودنشان و کاربردی که از آنها انتظار داریم سیم بندی های متفاوتی دارند.
5 سیم : این استایل سیم بندی در استپر موتور های تک قطبی کوچک رایج است. سیم های مشترک به هم میپیوندند و یک سیم پنجم مشترک تشکیل می شود. اینگونه استپ موتور را فقط بصورت تک قطبی می توان راه اندازی کرد.
6 سیم : در اینگونه استپ موتور ها هر فاز دارای 3 سیم است، میتوان 2 سیم وسط را به یکدیگر اتصال داد و از آن به عنوان استپر موتور تک قطبی استفاده کرد یا اتصال نداد و از آن بعنوان استپ موتور 2 قطبی استفاده کرد.
8 سیم : همه کاره ترین استپ موتور ها، 8 سیمه هستند، این استپر موتورها را می توان به شکل های مختلف راه اندازی کرد.
4 فاز تک قطبی : مانند استپ موتور 5 سیمه تمام سیم های مشترک را می توان یکی کرد.
2 فازِ 2 قطبیِ سری : فازها به شکل سری متصل هستند، مانند استپ موتور 6 سیمه.
2 فازِ 2 قطبیِ موازی : فاز ها بشکل موازی به هم متصل هستند. نتیجه مقاومت کمتر در مدار است اما نیازمند ورود 2 برابر جریان بیشتر است. نتیجه ی این سیم بندی، گشتاور و سرعت نهایی بالاتر است.
درایور استپر موتور چیست ؟
درایور استپ موتور در حقیقت راه انداز آن است، همانطور که ذکر شد استپر موتور پالس هایی به شکل on و off دریافت میکند و این پالسها هستند که شکل حرکت و عملکرد استپ موتور را کنترل می کنند. در عملکرد استپر موتور 2 ماژول دیگر به نام کنترلر و درایور وجود دارند، وظیفه درایور دریافت اطلاعات از کنترلر و تبدیل آن ها به پالس هایی برای حرکت دقیق استپ موتور است.
درایور استپ موتور
راه اندازی استپر موتور و مفهوم میکرو استپینگ
از آنجا که استپر موتورها برای دستیابی به حرکت های دقیق و با شرایط کاملا کنترل شده، طراحی و ساخته شده اند، به همین منظور و برای ارسال مجموعه ای از دستورها و فرمان های حرکتی نیاز به سیستم کنترلی دارند. این مجموعه کنترلی شامل دو بخش اصلی کنترلر (پردازشگر،CPU) و درایور است. کنترلر های صنعتی انواع و اقسام متفاوتی دارند که از میان آنها می توان به PLC ها، بردهای Mach3 ، آردوئینو، رزبری پای و ... اشاره کرد. این کنترلر ها بر اساس پارامترها و ساختارهای ذاتی خود، سیگنال های حرکتی اعم از سرعت، زاویه، شتاب، جهت و ... را بر اساس کدهای مرجع به درایور موتور منتقل نموده و درایور استپ موتور نیز با تقویت این سیگنال ها و ارسال فرمان های حرکتی بر مبنای ولتاژ و جریان، استپ موتور را با شرایط حرکتی خواسته شده به حرکت در می آورند. برنامه ریزی حرکتی استپر موتور ها از طریق نرم افزارهای مربوط به کنترلرها اتفاق می افتد و درایور توانایی خاصی در این زمینه ندارد و تنها تقویت کننده سیگنال و ارسال ولتاژ و جریان مورد نیاز برای هر نوع حرکتی به سمت موتور بر عهده این قطعه است. همانطور که کنترلر ها انواع مختلفی دارند، درایور استپر موتور نیز دارای انواع مختلفی مانند رو بردی، درایورهای صنعتی و دارای قابلیت میکرو استپینگ ( micro stepping ) است. مصرف کنندگان این قطعات با توجه به طراحی ها و نیازهای خود، مدل های مختلفی از موتور، درایور و کنترلر را انتخاب کرده و سیستم خود را راه اندازی می نمایند. همانطور که می دانید استپر موتورها دارای یک زاویه گام ذاتی هستند. به عنوان مثال 1.8 درجه. در صورتیکه دقت حرکتی بیشتر از این مقدار نیاز باشد، می بایست از قابلیت micro stepping درایور که به صورت دیپ سوئیچ هایی روی درایور است (نحوه ی تنظیمات داخل دیتاشیت های هر درایور وجود دارد) استفاده نمود و با استفاده از کنترلر، فرمان های حرکتی را به آن منتقل کرد. برخی از درایور های استپر موتور توانایی تقسیم هر گام موتور به 1024 قسمت را دارند. اما کنترل این موضوع نیز کار ساده ای نبوده و ممکن است دقت حرکتی را با خطای زیاد روبرو کند و یا اینکه به موتور آسیب وارد نماید. به همین منظور می بایست هر سه بخش این سیستم یعنی موتور، درایور و کنترلر توانایی و آمادگی این رفتار را داشته باشند.
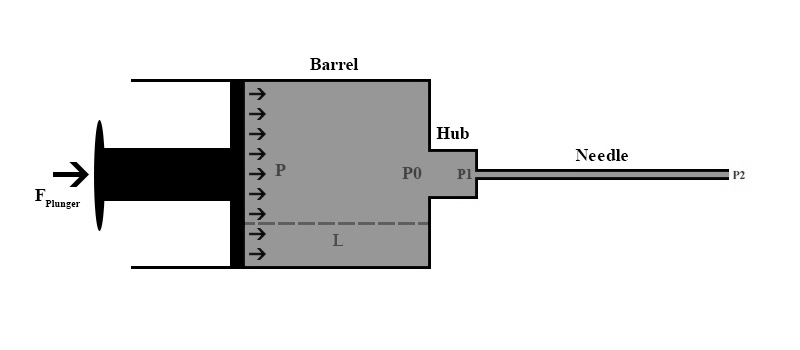
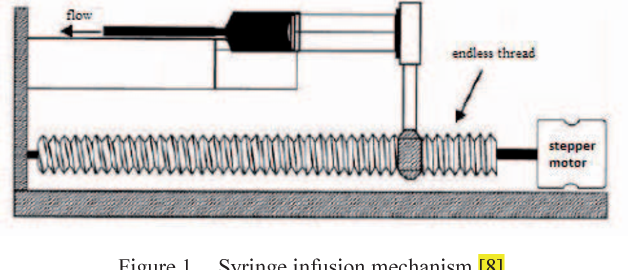
فشار خروجی پمپ سرنگ را محاسبه کنیدپمپ تزریق سرم (پمپ پریستالتیک یا پمپ ولومتریک-پمپ اینفیوژن )
من این پمپ سرنگ را طبق این دستورالعمل ها ساخته ام. اکنون من نیاز دارم که چگونه فشار خروجی را با توجه به سرعت استپ موتور و برعکس محاسبه کنم.
به هر حال نمیدانم مفید است یا نه، اما میدانم که رابطه بین گشتاور اعمال شده توسط موتور و نیروی خطی روی پیستون سرنگ به صورت زیر است:
$M = F r_a \tan(\alpha), \; \tan(\alpha) = \frac{p}{2 \pi r_a}$
که در آن $r_a$ شعاع میله رزوه ای، $\alpha$زاویه رزوه و p گام است.
بدین ترتیب داریم:
$M = \frac{F p}{2 \pi} = \frac{P r^2 p}{2}$
جایی که r شعاع سرنگ است. تا الان درسته؟ علاوه بر این، آیا مفید است؟ من خودم را ناخواسته در این پروژه گرفتار کردم اما هرگز چنین مواردی را مطالعه نکردم.
مشکل اینجاست که گشتاور اعمالشده به بار بستگی دارد، بنابراین نمیدانم چگونه فشار مایع خروجی را با سرعت استپ موتور مرتبط کنم.
مسیتونم از Unipolar stepper motor, six wire. It has a resolution of 200 steps per revolution (1.8 degrees). It is powered by 12 V and draws 310 mA current per coil. The torque is 1.6 kg*cm (0.15 Nm). Dimensions are 42 x 42 x 34 mm
استپ موتور ZK-3518HB1 دو فاز با گام ۱٫۸ درجه
چرا از سرعت تغییر حجم استفاده نمی کنیم و از بقای جرم استفاده نمی کنیم؟ –
این بستگی به حد جریان موتور، شتاب تمام گام، حداکثر شتاب و سرعت بالاتر و نرخ جریان مطلوب دارد. –
سوال این است که چگونه می توان فشار خروجی را از نرخ پله استخراج کرد.
پاسخ تمام محاسبات را انجام نمی دهد بلکه سعی می کند متغیرها را تعریف کند.
حداقل مشخصات مورد نیاز:
s = گام افزایشی [m] (پس از کاهش دنده)
$(°/step * mm/rev(wormgear) * 360°/1000[mm/m])$
F = حداقل نیروی پله [کیلوگرم] (که باید از بار بیشتر باشد تا از پرش در سرعت جلوگیری شود)
گشتاور * شعاع دنده، r [m] = F [kg] (تبدیل شده از N-m)
حداقل نیروی پله ای F باید از نیروی بار ورودی سرنگ تجاوز کند
F=Pi/Area برای جلوگیری از پرش
پی = فشار ورودی
Po = فشار خروجی
L = طول لوله
η = ویسکوزیته
R = شعاع
V = حجم سیال در فشار خروجی
v = سرعت سیال در فشار خروجی
برای هر مرحله متحدالمرکز تکرار کنید
$Flowrate = \dfrac{π\cdot r^4 \cdot (P-Po) }{ 8\cdot η\cdot L} [m^3/s]$
اگر خروجی زیر در هوا باشد، آیا می توانیم P1=P2 را فرض کنیم؟ نه
شاید بهتر باشد سرعت جریان را با ورودی نیرو برای سرنگ هدف اندازه گیری کنید، سپس دبی مورد نظر را تعریف کنید، سپس نسبت دنده و گشتاور موتور و سرعت گام مورد نیاز برای انجام کار را تعیین کنید.
با این حال، در نظر گرفتن بهینهسازی سرعت استپر، یک شتاب کنترلشده برای جلوگیری از پرش است.
اگر نرم افزار منبع باز GRBL Panel (S/W) را با این متغیرها در یک محافظ آردوینو CNC دارید، می توانید سرعت را به حداکثر برسانید و سپس نسبت آن را برای سرعت جریان کنترل کنید، با این S/W بهتر از هر چیز دیگری که من دارم. مواجه شدن.
، اما وقتی فشار پیستون، سپس نیروی مورد نیاز و در نهایت گشتاور را محاسبه کردم، چگونه آن را با سرعت گام مرتبط کنم؟ دیتاشیت ها فقط حداکثر گشتاور را ارائه می دهند و برخی از پله ها (نه این یکی) نیز با حداکثر گشتاور به عنوان تابعی از نرخ گام ارائه می شوند. این میزان گام را نشان نمی دهد که آن فشار در پیستون وجود دارد -
، اندازه های مختلف سوزن را دریافت کنم، نرخ جریان را اندازه گیری کنم. فرمول ها چسبندگی اولیه یا نیروی استاتیک پله ای را پوشش نمی دهند. سرعت جریان به نیروی بیشتری در برخی از سرعتها که نیروهای پلهای کاهش مییابند، نیاز دارد. شتاب سرعت گام کاهشی، سرعت پله را به میزان قابل توجهی افزایش می دهد، بنابراین، نیروی دینامیکی در سرعت تعیین شده توسط نرخ گام ممکن است با طراحی بهینه شود. بنابراین من هیچ ایده ای ندارم که شما می توانید به آن دست پیدا کنید، اما می تواند با آنچه من می توانستم به دست بیاورم متفاوت باشد. حداقل فرمول ها به شما کمک می کند تا مبادلات را درک کنید.
به عبارت دیگر محدوده جریان های مورد نیاز، سرعت جریان، سطح نازل، سطح بشکه، سطح پله* خطی = حجم پله را تعریف کنید، سپس نرخ گام را به سمت پایین شیب دار کنید و برای یک حجم کنترل شده متوقف شوید. سرعت سیال مقداری محدودیت خواهد داشت،
استپر موتور ( Stepper Motor ) یا استپ موتور ( Step Motor ) یا موتور پله ای یک موتور براشلس (Brushless ) الکتریکی DC است که یک دور کامل ( ۳۶۰ درجه ) را به تعدادی پله یا استپ مساوی تقسیم می نماید. کنترل موقعیت موتور پله ای برای رفتن به یک پله خاص یا ماندن در آن پله بدون استفاده از سیستم فیدبک می باشد و این نشانه دقت بالای این موتور ها است
. در موتور های DC معمولی ما برای کنترل چرخش شفت نیاز به کنترل لحظه به لحظه و سیستم بازخورد داریم. استپ موتورها معمولا دارای سرعت نسبتا پایینی در حدود 200 الی 300 دور در دقیقه هستند. اما موتورهایی با سرعت 1000 دور در دقیقه هم وجود دارند.
این موتور ها در هر پله یا استپ به میزان خاصی بر حسب درجه دوران می کنند ، به عنوان مثال محور استپ موتور ۲۰۰ استپ در هر استپ ۱/۸ درجه دوران می کنند
موتورهای پلهای معمولاً دارای 50 تا 100 قطب مغناطیس الکترومغناطیس (جفت قطب شمال و جنوب) هستند که توسط یک آهنربای دائمی یا یک جریان الکتریکی تولید میشوند.موتور پلهای یک موتور بدون جاروبک و سنکرون است که حرکت آن به صورت پلهای و گسسته است. در حالت کلی، موتور پلهای در هر پله یا گام به اندازه ۱٫۸ درجه میچرخد و در نتیجه، ۲۰۰ پله را برای چرخش یک دور کامل میپیماید. این نوع موتورها در زاویههای پله ۳۰، ۱۵، ۵، ۲٫۵ و ۲ درجهای نیز موجود هستند. موتورهای پلهای بر اساس اصول الکترومغناطیس کار میکنند و میتوان آنها را بدون فیدبک کنترل کرد. از آنجایی که موقعیت و سرعت این موتورها با کمک سیستمهای کنترل پیشرفته رایانهای به دقت قابل کنترل است، در بسیاری از کاربردهای مرتبط با کنترل دقیق موقعیت، مانند رباتیک، مورد استفاده قرار میگیرند.مانند سایر موتورهای الکتریکی، موتور پلهای یک بخش متحرک به نام روتور (Rotor) و یک بخش ثابت به نام استاتور (Stator) دارد. استاتور و روتور قطبهای مغناطیسی دارند و با انرژیدار کردن قطبهای استاتور، روتور برای تراز شدن با استاتور حرکت میکند. روتور یک قطعه آهن دندانهدار به شکل چرخدهنده است. استاتور نیز از مجموعه آهنرباهای الکتریکی تشکیل شده که در حول محور دندانهدار مرکزی قرار گرفتهاند.وقتی جریان از سیمپیچیهای فاز موتور پلهای عبور کند، شار مغناطیسی در استاتور و عمود بر جهت گذر جریان به وجود میآید. آهنرباها به طور همزمان انرژیدار میشوند. هنگامی که یک آهنربا با کمک یک مدار درایور خارجی یا میکروکنترلر انرژی میگیرد، شفت یا محور روتور طوری میچرخد که نسبت به استاتور در موقعیتی قرار گیرد که کمترین مقاومت را در برابر شار داشته باشد. این بدین معنی است که الکترومگنت (آهنربای الکتریکی) آن دندانههایی از چرخدنده را جذب میکند که نسبت به بقیه آهنرباها انحراف دارند. به همین دلیل، هنگامی که آهنربای بعدی روشن یا برقدار است، آهنربای قبلی خاموش میشود که منجر به جذب دندانههای چرخدهنده توسط آهنربای دوم خواهد شد. بنابراین، چرخش روتور به صورت پلهای خواهد بود و تعداد پلهها عدد صحیحی است که با توجه به زاویه حرکت در هر مرحله تعیین میشود
با کنترل زاویه هر پله، میتوانیم دقت و نرمی چرخش روتورِ موتور را کنترل کنیم. در موتور پلهای، سه مُد یا حالت تحریک وجود دارد که تحریک موتور پلهای
عملکرد پله کامل
در این حالت، روتور در یک مرحله به اندازه زاویه پایه 1٫8 درجه حرکت میکند و بدین ترتیب 200 پله برای اتمام چرخش آن لازم است. میتوانیم این حالت را با انرژیدار کردن فقط یک فاز از سیمپیچهای استاتور یا دو فاز عملی کنیم. عملکرد با یک فاز حداقل توان را از مدار درایور مصرف خواهد کرد. از سوی دیگر، وقتی دو فاز را در یک لحظه انرژیدار میکنیم، گشتاور و سرعت زیاد میشود.
مد تحریک موتور پلهای
عملکرد نصف پله
در این حالت، روتور به اندازه نصف زاویه پایه یک پله کامل میچرخد و در نتیجه گشتاور نسبت به عملکرد پله کامل بهبود مییابد. همچنین، نرمی و دقت حرکت دو برابر میشود.
عملکرد نصف گام
در عملکرد پله کوچک، زاویه پایه به مقادیر کوچکتر، حتی ۲۵۶ قسمت، تقسیم میشود. وقتی که افزایش نرمی حرکت مورد نظر باشد، عملکرد گام کوچک یا ریز مورد توجه قرار میگیرد.
انواع موتورهای پلهای
سه نوع موتور پلهای وجود داره که در زیر میارم براتون.
موتور پلهای مغناطیس دائم
زاویه پله معمولی یک موتور پلهای با آهنربای مغناطیس دائم 7٫5 تا 15 درجه است. شفت آهنی روتور با تغییر قطب شمال و جنوب در یک خط مستقیم موازی آهنی مغناطیسی میشود که نتیجه آن افزایش شدت شار مغناطیسی است و به همین دلیل گشتاور این نوع موتورها به طور قابل توجهی افزایش مییابد. موتورهای پلهای آهنربای دائم به دلیل مقادیر بالاتر زاویههای پله، رزولوشن یا دقت و نرمی پایینتری دارند. البته این موتورها، موتورهای کمهزینهای هست
هر قطب آهنربای دائمی یک نقطه توقف طبیعی برای شفت موتور ارائه می دهد.
تعداد بیشتر قطب ها به یک موتور پله ای اجازه می دهد تا خود را به طور دقیق و دقیق بین هر یک از قطب ها قرار دهد.
این یکی از ویژگیهای راحت موتور پلهای است، زیرا قطبهای درون یک موتور پلهای اجازه میدهد تا بدون هیچ گونه بازخورد موقعیتی، بهطور دقیق قرار گیرد
به عبارت دیگر در یک سیستم کنترل حلقه باز کار می کند. کنترل حلقه باز اجازه می دهد تا یک پالس الکتریکی از یک کنترل کننده، شفت موتور را از یک قطب به قطب دیگر حرکت دهد و بدون بازخورد موقعیتی به کنترل کننده، در تراز با قطب الکترومغناطیسی متوقف شود.
این یکی از مزایای موتور پله ای است، اما مزایای اضافی استپر موتور در مقاله ای جداگانه مورد بحث قرار خواهد گرفت.
هنگامی که می خواهیم وضوح را افزایش دهیم یا به کوچکترین حرکت چرخشی دست یابیم، طراحی پله حاوی تعداد بیشتری از قطب های مغناطیسی خواهد بود.
اساساً، اندازه پله افزایشی یک موتور پلهای بر اساس تعداد قطبهای آهنربای الکترومغناطیس به درجه خاصی از چرخش ثابت میشود. بنابراین، حرکت به یک موقعیت دقیق صرفاً ارسال تعداد صحیح دستورات پالس است.
موتورهای پله ای ممکن است تا 200 دندانه روتور یا 200-400 پله کامل در هر چرخش شفت موتور داشته باشند.
برای تعیین وضوح چرخش می توانیم کمی ریاضی انجام دهیم. اگر یک موتور پله ای 200 پله افزایشی داشته باشد و بدانیم که چرخش کامل برابر با یک دایره یا 360 درجه است، می توانیم 360 درجه را بر 200 تقسیم کنیم. این معادل 1.8 درجه چرخش زاویه کامل است.
400 پله تقسیم شده به 360 درجه، 0.9 درجه چرخش زاویه کامل گام را فراهم می کند.
خروجی یک پالس دیجیتال از درایور کنترلر معادل یک مرحله چرخش است.
با این افزایش در تعداد قطب های آهنربای الکترومغناطیسی، عملیات اساساً مانند مثال ارائه شده با استفاده از چرخش 90 درجه است، اما اکنون چرخش بیشتر شبیه به 1.8 درجه چرخش است که قبلاً ذکر شد.
در موقعیت 1، روتور در موقعیت بالایی با الکترومغناطیسی استاتور بالایی فعال شده است که نشان دهنده S برای قطبش جنوبی است و در موقعیت 2 استاتور الکترومغناطیس بالایی بدون انرژی است و استاتور مغناطیس الکترومغناطیسی به سمت راست فعال است، روتور در جهت عقربه های ساعت حرکت می کند و با آن هم تراز می شود. این الکترومغناطیس قطبش S جدید را نشان می دهد که امکان حرکت چرخشی دقیق درجه را فراهم می کند.
این تغییر قطبش الکترومغناطیسی به ایجاد چرخش 360 درجه ادامه می دهد. هرچه سرعت eپلاریزاسیون الکترومغناطیسی هر چه سرعت بیشتر باشد اتفاق می افتد.
پیش درآمدی بر استپر موتور
موتورهای DC معمولی تنها با یک کلید خاموش و روشن فعالیت می کنند و با وارد کردن ولتاژ شاهد چرخش موتور هستیم، برای برعکس کردن جهت چرخش هم کافیست نحوه اتصال قطب ها را عوض کنیم، اما استپ موتور ها امکان کنترل دقیقتر را به ما می دهند، اما چگونه ؟
ساختار استپ موتور
استپ موتورها دارای 2 بخش اصلی هستند.
روتور
استاتور
روتور : روتور همان سیلندر مرکزی استپ موتور است که روی آن تعدادی استپ قرار گرفته است، در موتور های جریان مستقیم ( موتورهای DC ) معمولی سیم پیچ ها روی روتور قرار دارند و آهنربای دائم روی استاتور تعبیه شده اما در استپ موتور ها، سیم پیچ ها روی استاتور تعبیه شده اند. در واقع در موتور های DC معمولی سیم پیچ ها همراه روتور در چرخش هستند اما در استپ موتورها اینچنین نیست.
استاتور : استاتور قسمت ثابت استپ موتورها هستند که روتور درون آن چرخش می کند، استاتور در این موتور ها دارای سیم پیچ هایی است که به آنها فاز می گوییم، وارد شدن پالس های الکتریکی به این فازها باعث چرخش روتور می شود.
دیاگرام استپر موتور
گام استپر موتور
منظور از گام، کوچک ترین چرخش قابل کنترل در استپر موتور است. استپ موتورها بسته به نوع کاربرد با دقت های مختلفی ساخته می شوند. زاویه گام همان زاویه ای است که به ازای هر گام طی می شود.
رابطه بین دور موتور و استپ ها : برای محاسبه تعداد استپ هایی که در یک ثانیه توسط موتور طی می شود باید تعداد دور بر دقیقه را در تعداد استپ های یک دور کامل ضرب کنیم و عدد حاصل را تقسیم بر 60 کنیم.
مثال : برای یک استپر موتور با دور 300 RPM یا 300 دور در دقیقه با تعداد استپ 200، تعداد استپ هایی که در یک ثانیه طی می شود به شکل زیر است :
1000=60/(200*300)
به این شکل می توان به دقت واقعی استپ موتور پی برد، در حالیکه 1000 استپ در ثانیه رد می شود اما ثانیه بعد می توان در یک استپ مشخص، حرکت موتور را به حالت سکون تبدیل کنیم.
عملکرد استپ موتور
درون استاتورِ استپر موتور تعدادی آهنربای الکتریکی وجود دارد که دارای استپ ( پله/دندانه ) هستند، این آهنرباها توسط سیستم کنترل با ارسال پالس هایی فعال و غیر فعال می شوند. در مرکز موتور روتور وجود دارد. روتور سیلندری آهنی دارای خاصیت مغناطیسی است که روی آن استپ هایی وجود دارد. با ارسال اولین پالس و فعال شدن اولین آهنربای الکتریکی، روتور شروع به چرخش می کند تا استپ های رتور دقیقا روبروی آهنربای الکتریکی فعال قرار بگیرند. در این حالت استپِ روتور با بقیه استپ های استاتور دارای انحرافی کم است. همراه با فعال شدن آهنربای الکتریکی بعدی و غیر فعال شدن آهنربای اول، استپ های روتور با استپ های آهنربای بعدی در یک راستا قرار می گیرند. با ادامه این روند روتور چرخش می کند و ما می توانیم شفت استپر موتور را در زاویه دلخواه قرار بدهیم.
برای مثال یک استپ موتور با درجه 1.8 باید 200 گام را طی کند تا یک دور کامل چرخش داشته باشد.
( 360 = 200 * 1.8 )
عملکرد استپر
و به این ترتیب می توان گفت هر چه تعداد استپ ها بیشتر باشد دقت عملکرد بیشتر می شود. استپ موتورها دارای سیستم کنترل حلقه باز هستند، به این معنی که نیاز به سیستم بازخورد ندارند. نحوه کار سیستم حلقه باز به این شکل است :
سیستم حلقه باز
انواع استپ موتور
مغناطیس دائم : دارای روتوری با آهنربای دائمی هستند و برای تجهیزاتی با سرعت پایین، گشتاور بالا و همچنین زاویه پله بالا مانند 45 یا 90 درجه استفاده می شود.
با مغناطیس متغیر : ساده ترین نوع استپ موتور، که روتور آن دارای خاصیت مغناطیس شونده است. با وارد کردن ولتاژ DC به سیم پیچ های استاتور، استپ های روتور به سمت قطب مغناطیسی ایجاد شده حرکت کرده و باعث چرخش موتور می شوند.
استپر موتور هیبرید : این استپ موتورها ترکیبی از 2 مدل استپ موتورهای بالا هستند، مرکز روتور قطب S و استپ های روتور قطب N است. استپر موتور های هیبریدی دارای 3 درجه استاندارد 0.9 و 1.8 و 3.6 درجه هستند.
استپر موتور هیبرید
استپ موتور ترمزدار : استپر موتور گاهی برای حمل و جابه جایی وزنه یا بار در محور عمودی استفاده می شوند، هنگامی که جریان برق به استپر موتور متصل نیست، ما ممکن است برای نگه داشتن استپ موتور در مکانی ثابت به ترمز نیاز داشته باشیم. برای این مورد استپر موتور ترمزدار پیشنهاد می شود. استپ موتور ترمزدار این قابلیت را ایجاد میکند که هنگامی که جریان برق به استپ موتور متصل نیست هیچ حرکتی انجام نشود و به اصطلاح استپ موتور در حالت قفل باشد.
استپ موتور گیربکس دار : در مواقعی که کاربرد ما به شکلی باشد که نیاز به کنترل دور موتور و گشتاور داشته باشیم از گیربکس برای استپ موتور استفاده میکنیم. عموما برای رسیدن به گشتاور بالا در سرعت های پایین از استپر موتور های گیربکس دار استفاده می شود.
استپر موتور انکودر دار : همانطور که با هم بررسی کردیم، عموما استپ موتورها در سیستم های حلقه باز کنترل می شوند. نحوه کار سیستم حلقه باز به این شکل است که داده ها وارد می شوند، فرآیند انجام می شود و داده ها خارج می شوند و به این شکل ما هیچگونه کنترلی بر موقعیت مکانی نخواهیم داشت. اما در مواقعی ممکن است نیاز به سیستم کنترل حلقه بسته در سرعت های پایین داشته باشیم. این کار با استفاده از استپر موتور معمولی قابل اجرا نیست و همینطور استفاده از سروو موتور به دلیل قیمت بالای آن باعث افزایش هزینه خواهد شد. در این مواقع استفاده از استپ موتور انکودر دار بسیار مقرون به صرفه خواهد بود.
استپر موتور ضد آب : انواعی از استپ موتور وجود دارند که دارای استاندارد ضد آب IP65 هستند. این استاندارد به استپر موتور این قابلیت را می دهد که در مقابل پاشش آب از هر زاویه ای مقاومت داشته باشد. به یاد داشته باشید این استاندارد به این معنا نیست که بتوان استپ موتور را زیر آب استفاده کرد، بلکه در مواقعی که ممکن است استپ موتور در معرض پاشش آب قرار گیرد از استپ موتور ضد آب استفاده می شود.
استپر موتور
انواع استپ موتور بر اساس شفت :
استپ موتور ها دارای شفت های مختلفی هستند که با توجه به نوع کاربرد باید استپر موتور با شفت مناسب را انتخاب کنیم. شفت در استپ موتور ها به 3 شکل زیر وجود دارند.
شفت دی شکل یا راند (D or Round ) : شفت های راند در سایز های مختلف موجود هستند. این شفت ها دارای یک سمت صاف و یک سمت بشکل D هستند و برای جلوگیری از لیز خوردن استفاده می شوند، در مواقعی که گشتاور بالا نیاز باشد از این شفت ها بخوبی میتوان استفاده کرد.
شفت دارای دنده : این شفت ها درای دندانه هایی هستند که برای وارد آوردن فشار بیشتر هنگام چرخش استفاده می شوند.
شفت لید اسکرو : شفت های لید اسکرو برای عملکرد های خطی بکار می روند، در تجهیزاتی که نیاز است هدی که اطلاعات را میخواند جابجا شود از این شفت استفاده می شود. برای مثال در دستگاهی مثل هارد درایو برای جابجایی هدی که روی دیسک مغناطیسی وجود دارد از شفت لید اسکرو مینیاتوری استفاده می شود.
شفت استپ موتور
انواع سیم پیچی استپر موتور
تک قطبی : مورد استفاده ترین استپر موتور تک قطبی دارای 4 سیم پیچِ استاتور است. این 4 سیم پیچ بصورت 2 به 2 با هم زوج هستن و دارای یک سر وسط مشترک هستند. در این نوع از استپر موتورها، از سیم پیچ ها در یک جهت جریان عبور داده می شود و به همین دلیل به نام استپر موتور 4 فاز یا تک قطبی شناخته می شوند. استپر موتور تک قطبی دارای 5 یا 6 سیم است و عموما با درجه حرکت 3.6 یا 7.5 ساخته می شوند.
دو قطبی : در استپر موتور 2 قطبی، هر سیم پیچ می تواند از 2 طرف برق دار شود. هر سیم پیچ در استپ موتور 2 قطبی به یک منبع تغذیه معکوس شونده نیاز دارد. استپر موتورهای 2 قطبی از انواع تک قطبی قدرت بیشتری دارند و به همین دلیل در طراحی هایی که فضا محدودتر است استفاده می شوند.
تک قطبی و دو قطبی
فاز در استپ موتور
منظور از قطب در استپر موتور همان قطب های آهنربا هستند. در استپر موتورها ممکن است تعداد مختلفی سیم پیچ وجود داشته باشد. اما این سیم پیچ ها بشکل گروه هایی به نام فاز با هم در ارتباط هستند. تمامی سیم پیچ های یک فاز با یکدیگر شروع بکار میکنند. استپ موتور ها عموما دارای 2 فاز هستند، اما استپر موتورهای 3 فاز و 5 فاز هم موجود هستند. بعضی اوقات استپ موتور تک قطبی به اسم استپ موتور 4 فاز شناخته می شود، در حالیکه در واقع 2 فاز دارد.
زاویه گام = 360 ÷ ( تعداد قطب ها به ازای هر فاز * تعداد فازها ) = 360 ÷ تعداد کل فازها
سیم بندی در استپر موتور
یک استپ موتور 2 قطبیِ 2 فاز دارای 2 گروه سیم پیچ است، استپ موتور 2 قطبیِ 2 فاز دارای 4 سیم است که هر گروه از سیم پیچی ها دارای 2 سیم است. یک موتور 4 فاز تک قطبی دارای 4 سیم پیچ است. بعضی از استپ موتورها دارای سیم بندی انعطاف پذیر هستند که این اجازه را به ما می دهد که استپ موتور را به هم بصورت تک قطبی و هم 2 قطبی راه اندازی کنیم.
استپر موتورها با توجه به تک قطبی یا 2 قطبی بودنشان و کاربردی که از آنها انتظار داریم سیم بندی های متفاوتی دارند.
5 سیم : این استایل سیم بندی در استپر موتور های تک قطبی کوچک رایج است. سیم های مشترک به هم میپیوندند و یک سیم پنجم مشترک تشکیل می شود. اینگونه استپ موتور را فقط بصورت تک قطبی می توان راه اندازی کرد.
6 سیم : در اینگونه استپ موتور ها هر فاز دارای 3 سیم است، میتوان 2 سیم وسط را به یکدیگر اتصال داد و از آن به عنوان استپر موتور تک قطبی استفاده کرد یا اتصال نداد و از آن بعنوان استپ موتور 2 قطبی استفاده کرد.
8 سیم : همه کاره ترین استپ موتور ها، 8 سیمه هستند، این استپر موتورها را می توان به شکل های مختلف راه اندازی کرد.
4 فاز تک قطبی : مانند استپ موتور 5 سیمه تمام سیم های مشترک را می توان یکی کرد.
2 فازِ 2 قطبیِ سری : فازها به شکل سری متصل هستند، مانند استپ موتور 6 سیمه.
2 فازِ 2 قطبیِ موازی : فاز ها بشکل موازی به هم متصل هستند. نتیجه مقاومت کمتر در مدار است اما نیازمند ورود 2 برابر جریان بیشتر است. نتیجه ی این سیم بندی، گشتاور و سرعت نهایی بالاتر است.
درایور استپر موتور چیست ؟
درایور استپ موتور در حقیقت راه انداز آن است، همانطور که ذکر شد استپر موتور پالس هایی به شکل on و off دریافت میکند و این پالسها هستند که شکل حرکت و عملکرد استپ موتور را کنترل می کنند. در عملکرد استپر موتور 2 ماژول دیگر به نام کنترلر و درایور وجود دارند، وظیفه درایور دریافت اطلاعات از کنترلر و تبدیل آن ها به پالس هایی برای حرکت دقیق استپ موتور است.
درایور استپ موتور
راه اندازی استپر موتور و مفهوم میکرو استپینگ
از آنجا که استپر موتورها برای دستیابی به حرکت های دقیق و با شرایط کاملا کنترل شده، طراحی و ساخته شده اند، به همین منظور و برای ارسال مجموعه ای از دستورها و فرمان های حرکتی نیاز به سیستم کنترلی دارند. این مجموعه کنترلی شامل دو بخش اصلی کنترلر (پردازشگر،CPU) و درایور است. کنترلر های صنعتی انواع و اقسام متفاوتی دارند که از میان آنها می توان به PLC ها، بردهای Mach3 ، آردوئینو، رزبری پای و ... اشاره کرد. این کنترلر ها بر اساس پارامترها و ساختارهای ذاتی خود، سیگنال های حرکتی اعم از سرعت، زاویه، شتاب، جهت و ... را بر اساس کدهای مرجع به درایور موتور منتقل نموده و درایور استپ موتور نیز با تقویت این سیگنال ها و ارسال فرمان های حرکتی بر مبنای ولتاژ و جریان، استپ موتور را با شرایط حرکتی خواسته شده به حرکت در می آورند. برنامه ریزی حرکتی استپر موتور ها از طریق نرم افزارهای مربوط به کنترلرها اتفاق می افتد و درایور توانایی خاصی در این زمینه ندارد و تنها تقویت کننده سیگنال و ارسال ولتاژ و جریان مورد نیاز برای هر نوع حرکتی به سمت موتور بر عهده این قطعه است. همانطور که کنترلر ها انواع مختلفی دارند، درایور استپر موتور نیز دارای انواع مختلفی مانند رو بردی، درایورهای صنعتی و دارای قابلیت میکرو استپینگ ( micro stepping ) است. مصرف کنندگان این قطعات با توجه به طراحی ها و نیازهای خود، مدل های مختلفی از موتور، درایور و کنترلر را انتخاب کرده و سیستم خود را راه اندازی می نمایند. همانطور که می دانید استپر موتورها دارای یک زاویه گام ذاتی هستند. به عنوان مثال 1.8 درجه. در صورتیکه دقت حرکتی بیشتر از این مقدار نیاز باشد، می بایست از قابلیت micro stepping درایور که به صورت دیپ سوئیچ هایی روی درایور است (نحوه ی تنظیمات داخل دیتاشیت های هر درایور وجود دارد) استفاده نمود و با استفاده از کنترلر، فرمان های حرکتی را به آن منتقل کرد. برخی از درایور های استپر موتور توانایی تقسیم هر گام موتور به 1024 قسمت را دارند. اما کنترل این موضوع نیز کار ساده ای نبوده و ممکن است دقت حرکتی را با خطای زیاد روبرو کند و یا اینکه به موتور آسیب وارد نماید. به همین منظور می بایست هر سه بخش این سیستم یعنی موتور، درایور و کنترلر توانایی و آمادگی این رفتار را داشته باشند.
فشار خروجی پمپ سرنگ را محاسبه کنیدپمپ تزریق سرم (پمپ پریستالتیک یا پمپ ولومتریک-پمپ اینفیوژن )
من این پمپ سرنگ را طبق این دستورالعمل ها ساخته ام. اکنون من نیاز دارم که چگونه فشار خروجی را با توجه به سرعت استپ موتور و برعکس محاسبه کنم.
به هر حال نمیدانم مفید است یا نه، اما میدانم که رابطه بین گشتاور اعمال شده توسط موتور و نیروی خطی روی پیستون سرنگ به صورت زیر است:
$M = F r_a \tan(\alpha), \; \tan(\alpha) = \frac{p}{2 \pi r_a}$
که در آن $r_a$ شعاع میله رزوه ای، $\alpha$زاویه رزوه و p گام است.
بدین ترتیب داریم:
$M = \frac{F p}{2 \pi} = \frac{P r^2 p}{2}$
جایی که r شعاع سرنگ است. تا الان درسته؟ علاوه بر این، آیا مفید است؟ من خودم را ناخواسته در این پروژه گرفتار کردم اما هرگز چنین مواردی را مطالعه نکردم.
مشکل اینجاست که گشتاور اعمالشده به بار بستگی دارد، بنابراین نمیدانم چگونه فشار مایع خروجی را با سرعت استپ موتور مرتبط کنم.
مسیتونم از Unipolar stepper motor, six wire. It has a resolution of 200 steps per revolution (1.8 degrees). It is powered by 12 V and draws 310 mA current per coil. The torque is 1.6 kg*cm (0.15 Nm). Dimensions are 42 x 42 x 34 mm
استپ موتور ZK-3518HB1 دو فاز با گام ۱٫۸ درجه
چرا از سرعت تغییر حجم استفاده نمی کنیم و از بقای جرم استفاده نمی کنیم؟ –
این بستگی به حد جریان موتور، شتاب تمام گام، حداکثر شتاب و سرعت بالاتر و نرخ جریان مطلوب دارد. –
سوال این است که چگونه می توان فشار خروجی را از نرخ پله استخراج کرد.
پاسخ تمام محاسبات را انجام نمی دهد بلکه سعی می کند متغیرها را تعریف کند.
حداقل مشخصات مورد نیاز:
s = گام افزایشی [m] (پس از کاهش دنده)
$(°/step * mm/rev(wormgear) * 360°/1000[mm/m])$
F = حداقل نیروی پله [کیلوگرم] (که باید از بار بیشتر باشد تا از پرش در سرعت جلوگیری شود)
گشتاور * شعاع دنده، r [m] = F [kg] (تبدیل شده از N-m)
حداقل نیروی پله ای F باید از نیروی بار ورودی سرنگ تجاوز کند
F=Pi/Area برای جلوگیری از پرش
پی = فشار ورودی
Po = فشار خروجی
L = طول لوله
η = ویسکوزیته
R = شعاع
V = حجم سیال در فشار خروجی
v = سرعت سیال در فشار خروجی
برای هر مرحله متحدالمرکز تکرار کنید
$Flowrate = \dfrac{π\cdot r^4 \cdot (P-Po) }{ 8\cdot η\cdot L} [m^3/s]$
اگر خروجی زیر در هوا باشد، آیا می توانیم P1=P2 را فرض کنیم؟ نه
شاید بهتر باشد سرعت جریان را با ورودی نیرو برای سرنگ هدف اندازه گیری کنید، سپس دبی مورد نظر را تعریف کنید، سپس نسبت دنده و گشتاور موتور و سرعت گام مورد نیاز برای انجام کار را تعیین کنید.
با این حال، در نظر گرفتن بهینهسازی سرعت استپر، یک شتاب کنترلشده برای جلوگیری از پرش است.
اگر نرم افزار منبع باز GRBL Panel (S/W) را با این متغیرها در یک محافظ آردوینو CNC دارید، می توانید سرعت را به حداکثر برسانید و سپس نسبت آن را برای سرعت جریان کنترل کنید، با این S/W بهتر از هر چیز دیگری که من دارم. مواجه شدن.
، اما وقتی فشار پیستون، سپس نیروی مورد نیاز و در نهایت گشتاور را محاسبه کردم، چگونه آن را با سرعت گام مرتبط کنم؟ دیتاشیت ها فقط حداکثر گشتاور را ارائه می دهند و برخی از پله ها (نه این یکی) نیز با حداکثر گشتاور به عنوان تابعی از نرخ گام ارائه می شوند. این میزان گام را نشان نمی دهد که آن فشار در پیستون وجود دارد -
، اندازه های مختلف سوزن را دریافت کنم، نرخ جریان را اندازه گیری کنم. فرمول ها چسبندگی اولیه یا نیروی استاتیک پله ای را پوشش نمی دهند. سرعت جریان به نیروی بیشتری در برخی از سرعتها که نیروهای پلهای کاهش مییابند، نیاز دارد. شتاب سرعت گام کاهشی، سرعت پله را به میزان قابل توجهی افزایش می دهد، بنابراین، نیروی دینامیکی در سرعت تعیین شده توسط نرخ گام ممکن است با طراحی بهینه شود. بنابراین من هیچ ایده ای ندارم که شما می توانید به آن دست پیدا کنید، اما می تواند با آنچه من می توانستم به دست بیاورم متفاوت باشد. حداقل فرمول ها به شما کمک می کند تا مبادلات را درک کنید.
به عبارت دیگر محدوده جریان های مورد نیاز، سرعت جریان، سطح نازل، سطح بشکه، سطح پله* خطی = حجم پله را تعریف کنید، سپس نرخ گام را به سمت پایین شیب دار کنید و برای یک حجم کنترل شده متوقف شوید. سرعت سیال مقداری محدودیت خواهد داشت،
-
rohamavation
نام: roham hesami radرهام حسامی راد
محل اقامت: 100 مایلی شمال لندن جاده آیلستون، لستر، لسترشر. LE2
عضویت : سهشنبه ۱۳۹۹/۸/۲۰ - ۰۸:۳۴
پست: 3291-
سپاس: 5494
- جنسیت:
تماس:
Re: هوافضا
اینجا یک نمونه ساده از استفاده از پایتون برای مدلسازی یک سیستم مبتنی بر فنر و دمپر که به صورت موازی به یک جرم متصل شده اوردم
import matplotlib.pyplot as plt
import numpy as np
from scipy.integrate import odeint
def MassSpringDamper(state, t):
k = 124e3 # ثابت فنر، نیوتن بر متر
m = 64.2 # جرم، کیلوگرم
c = 3 # ضریب کاهش، نیوتن ضرب ثانیه بر متر
g = 9.8 # متر بر ثانیه مربع
x, xd = state # جابجایی، x و سرعت x'
xdd = -k*x/m - c*xd - g # محاسبه شتاب، xdd = x''
return [xd, xdd]
# شرایط اولیه
state0 = [0.0, 1.2] # [x0, v0] [متر، متر بر ثانیه]
ti = 0.0 # زمان اولیه
tf = 4.0 # زمان نهایی
step = 0.001 # گام زمانی
t = np.arange(ti, tf, step)
# حل معادله دیفرانسیل
state = odeint(MassSpringDamper, state0, t)
x = np.array(state[:, 0]) # آرایه جابجایی
xd = np.array(state[:, 1]) # آرایه سرعت
# نمایش نتایج
plt.figure(figsize=(10, 6))
plt.plot(t, x * 1e3, 'b', label=r'$x (mm)$')
plt.plot(t, xd, 'g--', label=r'$\dot{x} (m/sec)$')
plt.xlabel('زمان (ثانیه)')
plt.ylabel('جابجایی (میلیمتر) / سرعت (متر بر ثانیه)')
plt.title('سیستم فنر-دمپر-جرم')
plt.legend()
plt.grid(True)
plt.show()
import matplotlib.pyplot as plt
import numpy as np
from scipy.integrate import odeint
def MassSpringDamper(state, t):
k = 124e3 # ثابت فنر، نیوتن بر متر
m = 64.2 # جرم، کیلوگرم
c = 3 # ضریب کاهش، نیوتن ضرب ثانیه بر متر
g = 9.8 # متر بر ثانیه مربع
x, xd = state # جابجایی، x و سرعت x'
xdd = -k*x/m - c*xd - g # محاسبه شتاب، xdd = x''
return [xd, xdd]
# شرایط اولیه
state0 = [0.0, 1.2] # [x0, v0] [متر، متر بر ثانیه]
ti = 0.0 # زمان اولیه
tf = 4.0 # زمان نهایی
step = 0.001 # گام زمانی
t = np.arange(ti, tf, step)
# حل معادله دیفرانسیل
state = odeint(MassSpringDamper, state0, t)
x = np.array(state[:, 0]) # آرایه جابجایی
xd = np.array(state[:, 1]) # آرایه سرعت
# نمایش نتایج
plt.figure(figsize=(10, 6))
plt.plot(t, x * 1e3, 'b', label=r'$x (mm)$')
plt.plot(t, xd, 'g--', label=r'$\dot{x} (m/sec)$')
plt.xlabel('زمان (ثانیه)')
plt.ylabel('جابجایی (میلیمتر) / سرعت (متر بر ثانیه)')
plt.title('سیستم فنر-دمپر-جرم')
plt.legend()
plt.grid(True)
plt.show()
-
rohamavation
نام: roham hesami radرهام حسامی راد
محل اقامت: 100 مایلی شمال لندن جاده آیلستون، لستر، لسترشر. LE2
عضویت : سهشنبه ۱۳۹۹/۸/۲۰ - ۰۸:۳۴
پست: 3291-
سپاس: 5494
- جنسیت:
تماس:
Re: هوافضا
کتاب درسیم میگه در چرخش ثابت بانکی نرخ چرخش به صورت زیر داده می شود: $\omega_{turn} = V/r$ (من متوجه شدم) 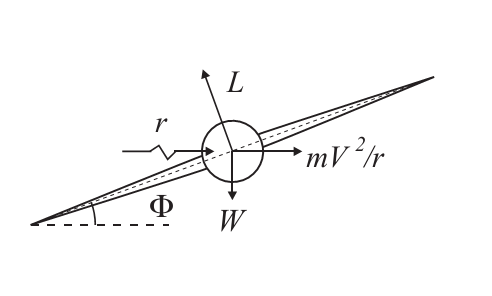
و بنابراین هواپیما نرخ انحراف و پیچ ثابتی را تجربه میکند که توسط دو معادله زیر بدست میاد
$n_{yaw}= \omega_{turn}cos \phi$
$q = \omega_{turn}sin \phi$
من 2 معادله بالا را متوجه نشدم. من فکر می کنم نرخ انحراف برابر با نرخ چرخشه و نرخ زمین صفره
نرخ انحراف و سرعت زمین در قاب هواپیما است نه در قاب زمین. اگر سرعت زمین صفر باشه، آنگاه هواپیما با مشاهده روی زمین یک مسیر دایرهای شیبدار (یک طرف دایره بالاتر است) پرواز میکنه. –
نرخ چرخش به محورهای زمین نرخ انحراف به محورهای هواپیما از این رو cosΦ ارجاع داده میشه
اگر در Φ = 0 بپیچید، نرخ چرخش شما نرخ انحراف و نرخ پیچ صفره
اگر در 90 درجه Φ بچرخونم سرعت انحرافم صفر و نرخ گام = سرعت چرخشه
برای حفظ یک چرخش ثابت و عدم از دست دادن ارتفاع، خلبان باید هنگام چرخش دسته را بکشه
در اینجا من دو معادله برای توضیح نرخ انحراف و نرخ پیچی هواپیما در چرخش ثابت بانکی برایت توضیح میدم
1. نرخ انحراف (yaw rate) که با $n_{yaw}$ نمایش داده میشود نشان میدهد که هواپیما چقدر در راستای محور Z (عمودی عمود بر سطح زمین) دوران میکنه. این فرمول نرخ چرخش هواپیما ($\omega_{turn}$) را با cosinus زاویه $\phi$ (فای) ضرب میکنه. این معادله برای توصیف چرخشهایی استفاده میشه که به زوایای غیر عمودی نسبت به محور اصلی حرکت دارن.
2. نرخ پیچ (pitch rate) که با $q$ نمایش داده میشود نشون میده که هواپیما چه مقدار در راستای محور Y (افقی موازی با سطح زمین) دوران میکند. این فرمول نرخ چرخش هواپیما ($\omega_{turn}$) را با sinus زاویه $\phi$ (فای) ضرب میکنه.
به عبارت دیگر $\phi$ زاویه بین محور چرخش هواپیما و محور Z است. این زاویه توسط خلبان کنترل میشه و تعیینکنندهی شیوهی چرخش هواپیما در هواست. اگر $\phi$ برابر با ۰ درجه باشد هواپیما دورانی در راستای محور Z نخواهد داشت و نرخ انحراف و پیچی هواپیما برابر با صفرهستش دیگه . اما اگر $\phi$ برابر با ۹۰ درجه باشه هواپیما در حال برخورد با زمین یا فرود ناپذیر بوده و نرخ انحراف و پیچی برابر با نرخ چرخش هواپیما داره
سعی میکنم مفهوم نرخ انحراف و نرخ پیچی هواپیما رو بهتون توضیح بدم:
1. نرخ انحراف (Yaw Rate):
• این نرخ نشون میده که هواپیما چقدر در راستای محور Z (عمودی عمود بر سطح زمین) دوران میکنه یعنی چقدر به چپ یا راست میپیچه.
• وقتی هواپیما به سمت راست یا چپ بپیچه این دوران به صورت یه پیچش حول محور عمودی اتفاق میافته که ما بهش "انحراف" میگیم.
• فرمول محاسبه نرخ انحراف اینجوریه: $n_yaw=\omega_{turn}×cosϕ$
• تو این فرمول $\omega_{turn}$ نرخ چرخش هواپیماست و $\phi$ زاویهایه که محور چرخش هواپیما با محور Z داره.
2. نرخ پیچ (Pitch Rate):
• این نرخ نشون میده که هواپیما چقدر در راستای محور Y (افقی موازی با سطح زمین) دوران میکنه یعنی چقدر به بالا یا پایین میپیچه.
• وقتی هواپیما به سمت بالا یا پایین بپیچه این دوران به صورت یه پیچش حول محور افقی اتفاق میافته که ما بهش "پیچ" میگیم.
• فرمول محاسبه نرخ پیچ اینجوریه: $q=\omega_{turn}×sinϕ$
• تو این فرمول $\omega_{turn}$ نرخ چرخش هواپیماست و $\phi$ زاویهایه که محور چرخش هواپیما با محور Z داره.
این دو نرخ به هواپیما کمک میکنه که درست و به شیوهی درستی توی هوا حرکت کنه. خلبان با کنترل کردن زاویه $\phi$ میتونه جهت و نحوهی چرخش هواپیما رو تنظیم کنه تا هواپیما به درستی در فضا حرکت کنه.
و بنابراین هواپیما نرخ انحراف و پیچ ثابتی را تجربه میکند که توسط دو معادله زیر بدست میاد
$n_{yaw}= \omega_{turn}cos \phi$
$q = \omega_{turn}sin \phi$
من 2 معادله بالا را متوجه نشدم. من فکر می کنم نرخ انحراف برابر با نرخ چرخشه و نرخ زمین صفره
نرخ انحراف و سرعت زمین در قاب هواپیما است نه در قاب زمین. اگر سرعت زمین صفر باشه، آنگاه هواپیما با مشاهده روی زمین یک مسیر دایرهای شیبدار (یک طرف دایره بالاتر است) پرواز میکنه. –
نرخ چرخش به محورهای زمین نرخ انحراف به محورهای هواپیما از این رو cosΦ ارجاع داده میشه
اگر در Φ = 0 بپیچید، نرخ چرخش شما نرخ انحراف و نرخ پیچ صفره
اگر در 90 درجه Φ بچرخونم سرعت انحرافم صفر و نرخ گام = سرعت چرخشه
برای حفظ یک چرخش ثابت و عدم از دست دادن ارتفاع، خلبان باید هنگام چرخش دسته را بکشه
در اینجا من دو معادله برای توضیح نرخ انحراف و نرخ پیچی هواپیما در چرخش ثابت بانکی برایت توضیح میدم
1. نرخ انحراف (yaw rate) که با $n_{yaw}$ نمایش داده میشود نشان میدهد که هواپیما چقدر در راستای محور Z (عمودی عمود بر سطح زمین) دوران میکنه. این فرمول نرخ چرخش هواپیما ($\omega_{turn}$) را با cosinus زاویه $\phi$ (فای) ضرب میکنه. این معادله برای توصیف چرخشهایی استفاده میشه که به زوایای غیر عمودی نسبت به محور اصلی حرکت دارن.
2. نرخ پیچ (pitch rate) که با $q$ نمایش داده میشود نشون میده که هواپیما چه مقدار در راستای محور Y (افقی موازی با سطح زمین) دوران میکند. این فرمول نرخ چرخش هواپیما ($\omega_{turn}$) را با sinus زاویه $\phi$ (فای) ضرب میکنه.
به عبارت دیگر $\phi$ زاویه بین محور چرخش هواپیما و محور Z است. این زاویه توسط خلبان کنترل میشه و تعیینکنندهی شیوهی چرخش هواپیما در هواست. اگر $\phi$ برابر با ۰ درجه باشد هواپیما دورانی در راستای محور Z نخواهد داشت و نرخ انحراف و پیچی هواپیما برابر با صفرهستش دیگه . اما اگر $\phi$ برابر با ۹۰ درجه باشه هواپیما در حال برخورد با زمین یا فرود ناپذیر بوده و نرخ انحراف و پیچی برابر با نرخ چرخش هواپیما داره
سعی میکنم مفهوم نرخ انحراف و نرخ پیچی هواپیما رو بهتون توضیح بدم:
1. نرخ انحراف (Yaw Rate):
• این نرخ نشون میده که هواپیما چقدر در راستای محور Z (عمودی عمود بر سطح زمین) دوران میکنه یعنی چقدر به چپ یا راست میپیچه.
• وقتی هواپیما به سمت راست یا چپ بپیچه این دوران به صورت یه پیچش حول محور عمودی اتفاق میافته که ما بهش "انحراف" میگیم.
• فرمول محاسبه نرخ انحراف اینجوریه: $n_yaw=\omega_{turn}×cosϕ$
• تو این فرمول $\omega_{turn}$ نرخ چرخش هواپیماست و $\phi$ زاویهایه که محور چرخش هواپیما با محور Z داره.
2. نرخ پیچ (Pitch Rate):
• این نرخ نشون میده که هواپیما چقدر در راستای محور Y (افقی موازی با سطح زمین) دوران میکنه یعنی چقدر به بالا یا پایین میپیچه.
• وقتی هواپیما به سمت بالا یا پایین بپیچه این دوران به صورت یه پیچش حول محور افقی اتفاق میافته که ما بهش "پیچ" میگیم.
• فرمول محاسبه نرخ پیچ اینجوریه: $q=\omega_{turn}×sinϕ$
• تو این فرمول $\omega_{turn}$ نرخ چرخش هواپیماست و $\phi$ زاویهایه که محور چرخش هواپیما با محور Z داره.
این دو نرخ به هواپیما کمک میکنه که درست و به شیوهی درستی توی هوا حرکت کنه. خلبان با کنترل کردن زاویه $\phi$ میتونه جهت و نحوهی چرخش هواپیما رو تنظیم کنه تا هواپیما به درستی در فضا حرکت کنه.
-
rohamavation
نام: roham hesami radرهام حسامی راد
محل اقامت: 100 مایلی شمال لندن جاده آیلستون، لستر، لسترشر. LE2
عضویت : سهشنبه ۱۳۹۹/۸/۲۰ - ۰۸:۳۴
پست: 3291-
سپاس: 5494
- جنسیت:
تماس:
Re: هوافضا
چرا بعضی جنگنده ها بال متحرک دارند مثا اف 14 ولی الان بال متحرک استفاده نمیشه
بعضی از جنگندهها مثل اف-۱۴ قدیمیترها بالهای متحرک داشتن که با استفاده از اونها میتونستن تغییراتی توی پرواز ایجاد کنن. ولی الان، با پیشرفت تکنولوژی، جنگندهها از سیستمهای مدرنتری استفاده میکنن که به جای بالهای متحرک، از تکنیکهای دیجیتالی و وکتورینگ برداری استفاده میکنن.
این تغییرات به خاطر مزایایی مثل سبکتر بودن و کارآیی بیشتر در کنترل پرواز، کاهش هزینهها و افزایش ایمنی پرواز انجام شده. بنابراین، برای جنگندههای جدید، استفاده از سیستمهای دیجیتالی بیشتر رواج داره تا بالهای متحرک.قبلاً جنگندهها برای کنترل پرواز از بالهای متحرک استفاده میکردن. این بالها، که به فلاپ و یا سپویلر هم معروف هستن، میتونستن در زمانهای مختلف پرواز، مانند هنگام فرود و بلند شدن، تغییراتی رو در پرواز جنگنده ایجاد کنن.
اما با پیشرفت فناوری، روشهای جدیدتری برای کنترل پرواز پدیدار شد. به جای استفاده از بالهای متحرک، سیستمهای دیجیتالی و تکنولوژیهای متقدم مثل وکتورینگ برداری به کار گرفته شدن. این سیستمها با استفاده از کامپیوترها و سنسورهای پیشرفته، به طور دقیق تر و کارآمدتر میتونن پرواز جنگنده رو کنترل کنن.
یکی از دلایلی که این تغییرات صورت گرفته، وزن سبکتر و کارآیی بالاتر این سیستمهای دیجیتالیه. همچنین، استفاده از این تکنولوژیها باعث کاهش هزینهها و افزایش ایمنی پرواز شده. بنابراین برای جنگندههای جدید، استفاده از سیستمهای دیجیتالی به جای بالهای متحرک، رایجتر شده.
بعضی از جنگندهها مثل اف-۱۴ قدیمیترها بالهای متحرک داشتن که با استفاده از اونها میتونستن تغییراتی توی پرواز ایجاد کنن. ولی الان، با پیشرفت تکنولوژی، جنگندهها از سیستمهای مدرنتری استفاده میکنن که به جای بالهای متحرک، از تکنیکهای دیجیتالی و وکتورینگ برداری استفاده میکنن.
این تغییرات به خاطر مزایایی مثل سبکتر بودن و کارآیی بیشتر در کنترل پرواز، کاهش هزینهها و افزایش ایمنی پرواز انجام شده. بنابراین، برای جنگندههای جدید، استفاده از سیستمهای دیجیتالی بیشتر رواج داره تا بالهای متحرک.قبلاً جنگندهها برای کنترل پرواز از بالهای متحرک استفاده میکردن. این بالها، که به فلاپ و یا سپویلر هم معروف هستن، میتونستن در زمانهای مختلف پرواز، مانند هنگام فرود و بلند شدن، تغییراتی رو در پرواز جنگنده ایجاد کنن.
اما با پیشرفت فناوری، روشهای جدیدتری برای کنترل پرواز پدیدار شد. به جای استفاده از بالهای متحرک، سیستمهای دیجیتالی و تکنولوژیهای متقدم مثل وکتورینگ برداری به کار گرفته شدن. این سیستمها با استفاده از کامپیوترها و سنسورهای پیشرفته، به طور دقیق تر و کارآمدتر میتونن پرواز جنگنده رو کنترل کنن.
یکی از دلایلی که این تغییرات صورت گرفته، وزن سبکتر و کارآیی بالاتر این سیستمهای دیجیتالیه. همچنین، استفاده از این تکنولوژیها باعث کاهش هزینهها و افزایش ایمنی پرواز شده. بنابراین برای جنگندههای جدید، استفاده از سیستمهای دیجیتالی به جای بالهای متحرک، رایجتر شده.
-
rohamavation
نام: roham hesami radرهام حسامی راد
محل اقامت: 100 مایلی شمال لندن جاده آیلستون، لستر، لسترشر. LE2
عضویت : سهشنبه ۱۳۹۹/۸/۲۰ - ۰۸:۳۴
پست: 3291-
سپاس: 5494
- جنسیت:
تماس:
Re: هوافضا
اجزای مختلف دکل موتور چیست؟
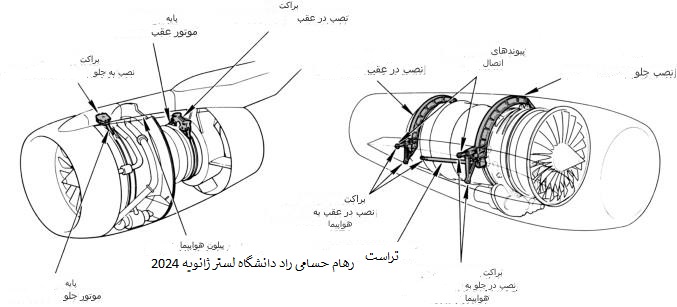
در فیرینگ پیلون موتور هواپیما، اجزای مختلفی داریم که هرکدام وظایف مختلفی رو به عهده دارن. این اجزا شامل:
پوسته (فیرینگ): این بخش مثل پوششی حول موتور قرار داره که بیرونیش رو درست میکنه. پوستهها معمولا از آلیاژهای مقاوم مثل تیتانیوم (Ti-64) یا آلومینیوم ساخته میشن. آلیاژ تیتانیوم به دلیل مقاومت بالاش در برابر دما و وزن سبکش مناسبه.
پایهها و براکتها: این قسمتها برای نصب و نگهداری موتور در داخل فیرینگ پیلون استفاده میشن. آنها معمولا از آلیاژهای مقاوم ساخته میشن که بتونن با بارهای وزن موتور و فشارهای دینامیکی سر و کار داشته باشن.
سیستمهای سرمایش و گرمایش: این سیستمها در داخل فیرینگ پیلون نصب میشن تا دمای موتور رو در محدوده مطلوب نگه دارن. برای اجزای این سیستمها از آلیاژهای مقاوم به دما استفاده میشه.
سیستمهای صوتی و صدایی: بعضی از فیرینگهای پیلون دارای سیستمهای کنترل و کاهنده صدا برای کم کردن نویز موتور هستن. این سیستمها هم با استانداردهای صنعتی از آلیاژهای مقاوم ساخته میشن.
در مورد استفاده از آلومینیوم به جای آلیاژ تیتانیوم (Ti-64) برای پایهها و فیرینگهای پیلون موتور هواپیما، بله ممکنه ولی باید مطمئن بشیم که آلومینیومی که استفاده میکنیم از آلیاژهای مناسبیه که مقاومت لازم رو در برابر دما و فشار دارن.یژگیهای مهم این آلیاژ عبارتند از:
مقاومت در برابر دما: آلیاژ Ti-64 دارای مقاومت بالا در برابر دما و حرارت است، که این ویژگی آن را مناسب برای محیطهای با دماهای بالا میکند.
مقاومت در برابر خوردگی: این آلیاژ دارای مقاومت خوبی در برابر خوردگی و اکسیداسیون است که آن را به یک گزینه مناسب در برابر شرایط زیست محیطی و شیمیایی میکند.
وزن سبک: به دلیل استفاده از تیتانیوم و آلومینیوم، این آلیاژ وزن سبکی دارد که آن را برای کاربردهایی که نیاز به وزن کم دارند، مناسب میسازد.
مقاومت مکانیکی: آلیاژ Ti-64 دارای مقاومت مکانیکی بالا و استحکام مناسبی است که آن را برای استفاده در قطعاتی که نیاز به استحکام و مقاومت دارند، مناسب میکند.
۱. تیر/پایه نصب رو به جلو: این قسمت به صورت عمودی به محور موتور اتصال میشه و بیشتر وزن موتور رو تحمل میکنه. همچنین بارهای تصادفی و اضطراری مثل FBO رو هم پشتیبانی میکنه.
۲. تراست استرات/پیوند/موتور: این بخش بیشتر با خط رانش موتور هماهنگ شده و بار رو از موتور به بدنه هواپیما منتقل میکنه. همچنین بارهای تصادفی رو هم حمل میکنه.
۳. تیر/تیر برای نصب عقب/عقب: این قسمت بر روی محور موتور نصب میشه و معمولاً از قاب به یوغ یا پایههای نازکی که ارتباط موتور رو با ساختار دکل برقرار میکنن استفاده میشه. این اجزا به تنظیم انبساط موتور کمک میکنن.
۴. قاب فضایی: این بخش بیشتر برای توزیع بارها و ایجاد استحکام در ساختار استفاده میشه و از عناصر قبلی پشتیبانی میکنه.
در مورد مواد استفاده شده هم، آلومینیوم به طور گسترده در پایهها استفاده میشه، با فولاد در صورت نیاز، و تیتانیوم زمانی که مطالعات تجاری وزن به قیمتش توجیه میکنه. تیتانیوم گرونه و ماشینکاریش هم سخته، بنابراین زیاد ازش استفاده نمیشه، البته اخیراً در طرحهای جدید بیشتر دیده میشه.
دما هم باید در نظر گرفته بشه، اما معمولاً یک عامل اساسی نیست، مخصوصاً برای موتورهای نصب شده روی بدنه، و مناطق کناری بخشهای سرد موتور. قسمتهای سنگین موتور، مثل فن، که جلوش سرده، با پایههای بزرگ و پیچیده با سطح مقطع بزرگ و ممان اینرسی (مثلاً یوغ) پشتیبانی میشن و واکنش میگیرن.
ساخت این قطعات از تیتانیوم گرونه و بهتره از آلومینیوم ساخته بشن. قسمتهای داغ عقب موتور هم با پایههای سادهتر و کوچکتر، که میتونن از تیتانیوم باشن، پشتیبانی میشن.
به طور کلی، داشتن اتصالات تیتانیومی کوچکتر و سادهتر عملیتره، به خاطر توزیع مساوی وزن بین پایههای جلو و عقب، حتی اگه ناحیه دکل بر روی بال معرض گرما باشه.
در فیرینگ پیلون موتور هواپیما، اجزای مختلفی داریم که هرکدام وظایف مختلفی رو به عهده دارن. این اجزا شامل:
پوسته (فیرینگ): این بخش مثل پوششی حول موتور قرار داره که بیرونیش رو درست میکنه. پوستهها معمولا از آلیاژهای مقاوم مثل تیتانیوم (Ti-64) یا آلومینیوم ساخته میشن. آلیاژ تیتانیوم به دلیل مقاومت بالاش در برابر دما و وزن سبکش مناسبه.
پایهها و براکتها: این قسمتها برای نصب و نگهداری موتور در داخل فیرینگ پیلون استفاده میشن. آنها معمولا از آلیاژهای مقاوم ساخته میشن که بتونن با بارهای وزن موتور و فشارهای دینامیکی سر و کار داشته باشن.
سیستمهای سرمایش و گرمایش: این سیستمها در داخل فیرینگ پیلون نصب میشن تا دمای موتور رو در محدوده مطلوب نگه دارن. برای اجزای این سیستمها از آلیاژهای مقاوم به دما استفاده میشه.
سیستمهای صوتی و صدایی: بعضی از فیرینگهای پیلون دارای سیستمهای کنترل و کاهنده صدا برای کم کردن نویز موتور هستن. این سیستمها هم با استانداردهای صنعتی از آلیاژهای مقاوم ساخته میشن.
در مورد استفاده از آلومینیوم به جای آلیاژ تیتانیوم (Ti-64) برای پایهها و فیرینگهای پیلون موتور هواپیما، بله ممکنه ولی باید مطمئن بشیم که آلومینیومی که استفاده میکنیم از آلیاژهای مناسبیه که مقاومت لازم رو در برابر دما و فشار دارن.یژگیهای مهم این آلیاژ عبارتند از:
مقاومت در برابر دما: آلیاژ Ti-64 دارای مقاومت بالا در برابر دما و حرارت است، که این ویژگی آن را مناسب برای محیطهای با دماهای بالا میکند.
مقاومت در برابر خوردگی: این آلیاژ دارای مقاومت خوبی در برابر خوردگی و اکسیداسیون است که آن را به یک گزینه مناسب در برابر شرایط زیست محیطی و شیمیایی میکند.
وزن سبک: به دلیل استفاده از تیتانیوم و آلومینیوم، این آلیاژ وزن سبکی دارد که آن را برای کاربردهایی که نیاز به وزن کم دارند، مناسب میسازد.
مقاومت مکانیکی: آلیاژ Ti-64 دارای مقاومت مکانیکی بالا و استحکام مناسبی است که آن را برای استفاده در قطعاتی که نیاز به استحکام و مقاومت دارند، مناسب میکند.
۱. تیر/پایه نصب رو به جلو: این قسمت به صورت عمودی به محور موتور اتصال میشه و بیشتر وزن موتور رو تحمل میکنه. همچنین بارهای تصادفی و اضطراری مثل FBO رو هم پشتیبانی میکنه.
۲. تراست استرات/پیوند/موتور: این بخش بیشتر با خط رانش موتور هماهنگ شده و بار رو از موتور به بدنه هواپیما منتقل میکنه. همچنین بارهای تصادفی رو هم حمل میکنه.
۳. تیر/تیر برای نصب عقب/عقب: این قسمت بر روی محور موتور نصب میشه و معمولاً از قاب به یوغ یا پایههای نازکی که ارتباط موتور رو با ساختار دکل برقرار میکنن استفاده میشه. این اجزا به تنظیم انبساط موتور کمک میکنن.
۴. قاب فضایی: این بخش بیشتر برای توزیع بارها و ایجاد استحکام در ساختار استفاده میشه و از عناصر قبلی پشتیبانی میکنه.
در مورد مواد استفاده شده هم، آلومینیوم به طور گسترده در پایهها استفاده میشه، با فولاد در صورت نیاز، و تیتانیوم زمانی که مطالعات تجاری وزن به قیمتش توجیه میکنه. تیتانیوم گرونه و ماشینکاریش هم سخته، بنابراین زیاد ازش استفاده نمیشه، البته اخیراً در طرحهای جدید بیشتر دیده میشه.
دما هم باید در نظر گرفته بشه، اما معمولاً یک عامل اساسی نیست، مخصوصاً برای موتورهای نصب شده روی بدنه، و مناطق کناری بخشهای سرد موتور. قسمتهای سنگین موتور، مثل فن، که جلوش سرده، با پایههای بزرگ و پیچیده با سطح مقطع بزرگ و ممان اینرسی (مثلاً یوغ) پشتیبانی میشن و واکنش میگیرن.
ساخت این قطعات از تیتانیوم گرونه و بهتره از آلومینیوم ساخته بشن. قسمتهای داغ عقب موتور هم با پایههای سادهتر و کوچکتر، که میتونن از تیتانیوم باشن، پشتیبانی میشن.
به طور کلی، داشتن اتصالات تیتانیومی کوچکتر و سادهتر عملیتره، به خاطر توزیع مساوی وزن بین پایههای جلو و عقب، حتی اگه ناحیه دکل بر روی بال معرض گرما باشه.
-
rohamavation
نام: roham hesami radرهام حسامی راد
محل اقامت: 100 مایلی شمال لندن جاده آیلستون، لستر، لسترشر. LE2
عضویت : سهشنبه ۱۳۹۹/۸/۲۰ - ۰۸:۳۴
پست: 3291-
سپاس: 5494
- جنسیت:
تماس:
Re: هوافضا
همچین که بگم این کار کردن با مواد کمتر و استفاده از طراحیهای کمتر جامد و ضخامت کمتر میتونه به استحکام و استحکام مورد نیاز ارتعاش کمک کنه با این الگوهای بافتی که تغییر میکنن به راحتی و با کارایی بالا میشه این کارو انجام داد. این الگوها اجازه میدن خواص مختلفی رو بدون تغییر در ضخامت ساختار "پایه" اعمال کنیم. استفاده موفقیتآمیز از این روش نیازمند تواناییهای محاسباتی و ساخت پیشرفته است و بنابراین در گذشته معمولاً مورد استفاده قرار نمیگرفت.
الگوهای کاشی کاری مثلثی مثل "تایل پیچشی" تو طراحی کیس (محفظه) موتورها برای بهبود کارایی هواپیما و موتورها استفاده میشن. این الگوها که به عنوان "تایل پیچشی" یا "سهگوش" شناخته میشن در موتورهای هواپیماها بهویژه در نسل جدید دیده میشن. دلایل استفاده از این الگوها شامل:
1. کاهش نویز: این الگوی کاشی کاری میتونه با کاهش نویز در حین پرواز تاثیرگذاری بالاتری داشته باشه.
2. افزایش بهرهوری: الگوهای کاشی کاری مثلثی میتونند به افزایش کارایی هواپیما و موتورها کمک کنن.
3. بهبود آرومایی جریان هوا: این الگو باعث بهبود آرومایی جریان هوا به سمت توربین میشه.
4. طراحی سبکتر: این الگوها به طراحان امکان میدن که کیس موتور رو با وزن کمتری طراحی کنن.
5. راحتی سیستمهای خنککننده: این الگوها ممکنه در طراحی بهینهتر سیستمهای خنککننده درون کیس موتور نقش داشته باشن.
به طور کلی استفاده از الگوهای کاشی کاری مثلثی در کیس موتورها برای بهبود کارایی و کاهش نویز از دلایل اصلی طراحی مدرن موتورها است.
پوشش سطح خارجی موتورهای جت یا کیس موتور با الگوهای کاشی کاری مثلثی یک تکنیک طراحی است که برای بهبود کارایی هواپیما و موتورها استفاده میشه. این الگوها با شباهت به مثلثهای کوچک یا مشابه آنها در سطح خارجی کیس موتور به صورت یک الگوی هندسی استفاده میشن. این الگوها ممکنه شامل مثلثهای متساویالساقین مثلثهای متساویالاضلاع یا حتی مثلثهای به شکل کمان باشن.
پوشش کیس موتورها با الگوی کاشی کاری مثلثی یا "تایل پیچشی" یک تکنیک طراحیه که سطح کیس موتور رو با تایلهایی که الگوهای مثلثی دارن پوشانده میشه. این تایلها به شکل مثلثهای کوچک یا تایلهای به شکل کاشی طراحی شدن و به صورت تکراری روی سطح کیس موتور قرار میگیرن و یک الگوی پیچش رو ایجاد میکنن. این الگوی مثلثی نه تنها از لحاظ علمی و کاربردی مؤثره بلکه در طراحی ظاهری هواپیماها هم جذابیت ایجاد میکنه.
استفاده از این تکنیک میتونه به بهبود کارایی موتورها و هواپیماها کمک کنه اما تنها یکی از عواملیه که در طراحی موتورها و هواپیماها استفاده میشه و به تنهایی نمیتونه کلیه تغییرات و بهبودهای کارایی رو فراهم کنه.
الگوهای کاشی کاری مثلثی مثل "تایل پیچشی" تو طراحی کیس (محفظه) موتورها برای بهبود کارایی هواپیما و موتورها استفاده میشن. این الگوها که به عنوان "تایل پیچشی" یا "سهگوش" شناخته میشن در موتورهای هواپیماها بهویژه در نسل جدید دیده میشن. دلایل استفاده از این الگوها شامل:
1. کاهش نویز: این الگوی کاشی کاری میتونه با کاهش نویز در حین پرواز تاثیرگذاری بالاتری داشته باشه.
2. افزایش بهرهوری: الگوهای کاشی کاری مثلثی میتونند به افزایش کارایی هواپیما و موتورها کمک کنن.
3. بهبود آرومایی جریان هوا: این الگو باعث بهبود آرومایی جریان هوا به سمت توربین میشه.
4. طراحی سبکتر: این الگوها به طراحان امکان میدن که کیس موتور رو با وزن کمتری طراحی کنن.
5. راحتی سیستمهای خنککننده: این الگوها ممکنه در طراحی بهینهتر سیستمهای خنککننده درون کیس موتور نقش داشته باشن.
به طور کلی استفاده از الگوهای کاشی کاری مثلثی در کیس موتورها برای بهبود کارایی و کاهش نویز از دلایل اصلی طراحی مدرن موتورها است.
پوشش سطح خارجی موتورهای جت یا کیس موتور با الگوهای کاشی کاری مثلثی یک تکنیک طراحی است که برای بهبود کارایی هواپیما و موتورها استفاده میشه. این الگوها با شباهت به مثلثهای کوچک یا مشابه آنها در سطح خارجی کیس موتور به صورت یک الگوی هندسی استفاده میشن. این الگوها ممکنه شامل مثلثهای متساویالساقین مثلثهای متساویالاضلاع یا حتی مثلثهای به شکل کمان باشن.
پوشش کیس موتورها با الگوی کاشی کاری مثلثی یا "تایل پیچشی" یک تکنیک طراحیه که سطح کیس موتور رو با تایلهایی که الگوهای مثلثی دارن پوشانده میشه. این تایلها به شکل مثلثهای کوچک یا تایلهای به شکل کاشی طراحی شدن و به صورت تکراری روی سطح کیس موتور قرار میگیرن و یک الگوی پیچش رو ایجاد میکنن. این الگوی مثلثی نه تنها از لحاظ علمی و کاربردی مؤثره بلکه در طراحی ظاهری هواپیماها هم جذابیت ایجاد میکنه.
استفاده از این تکنیک میتونه به بهبود کارایی موتورها و هواپیماها کمک کنه اما تنها یکی از عواملیه که در طراحی موتورها و هواپیماها استفاده میشه و به تنهایی نمیتونه کلیه تغییرات و بهبودهای کارایی رو فراهم کنه.
-
rohamavation
نام: roham hesami radرهام حسامی راد
محل اقامت: 100 مایلی شمال لندن جاده آیلستون، لستر، لسترشر. LE2
عضویت : سهشنبه ۱۳۹۹/۸/۲۰ - ۰۸:۳۴
پست: 3291-
سپاس: 5494
- جنسیت:
تماس:
Re: هوافضا
سیستم برق هواپیما یکی از جوونترین و پیچیدهترین قسمتاشه. این سیستم برق مسئول اینه که برق برای همه سیستمهای الکتریکی و الکترونیکی هواپیما تأمین بشه، از روشنایی کابین و سیستمهای ارتباطی گرفته تا تجهیزات ناوبری و سیستمهای پیشرانش موتورها.
منابع تولید برق هواپیما معمولاً شامل یک یا چند توربین گازی میشن. این توربینها با سوخت هواپیما کار میکنن و برق تولید میکنن که بعدش توزیع میشه.
ولتاژ برق در هواپیما معمولاً حدود ۲۸ ولته. این ولتاژ توسط ژنراتورها یا مولدهای برق اصلی تولید میشه و بعدش توسط تبدیلکنندهها به ولتاژهای مختلفی تبدیل میشه که برای سیستمهای مختلف استفاده میشه. برای مثال، ولتاژ برای روشنایی کابین یا تجهیزات الکترونیکی ممکنه متفاوت باشه.
چرا فرکانس برق هواپیما ۴۰۰ هرتزه؟
فرکانس برق به تعداد دورهایی که در هر ثانیه اتفاق میفته اندازهگیری میشه و این واحد رو هرتز میگن. در بسیاری از کشورها، مثل آمریکا و کشورهای اروپایی، فرکانس استاندارد برق شبکهها ۵۰ یا ۶۰ هرتزه، اما در هواپیماها فرکانس معمولاً ۴۰۰ هرتزه.
دلیل این تفاوت به دو چیز مربوطه:
۱. وزن و حجم: با افزایش فرکانس، اندازه و وزن تبدیلکنندهها و تجهیزات الکترونیکی که برای این فرکانس ساخته میشن، کمتر میشه. این در هواپیماها، جایی که هر کیلوگرم اضافی خیلی مهمه، خیلی اهمیت داره.
۲. مقاومت در برابر توربولانس: فرکانس بالا به اندازهگیریهای الکتریکی در مقابل نوسانات و توربولانسهای هواپیما کمک میکنه. این باعث میشه که سیستم برق هواپیما به طور کلی پایدارتر عمل کنه.
بنابراین، با توجه به این دو عامل، انتخاب فرکانس ۴۰۰ هرتز برای هواپیماها معمولاً بهترین گزینه است."
منابع تولید برق هواپیما معمولاً شامل یک یا چند توربین گازی میشن. این توربینها با سوخت هواپیما کار میکنن و برق تولید میکنن که بعدش توزیع میشه.
ولتاژ برق در هواپیما معمولاً حدود ۲۸ ولته. این ولتاژ توسط ژنراتورها یا مولدهای برق اصلی تولید میشه و بعدش توسط تبدیلکنندهها به ولتاژهای مختلفی تبدیل میشه که برای سیستمهای مختلف استفاده میشه. برای مثال، ولتاژ برای روشنایی کابین یا تجهیزات الکترونیکی ممکنه متفاوت باشه.
چرا فرکانس برق هواپیما ۴۰۰ هرتزه؟
فرکانس برق به تعداد دورهایی که در هر ثانیه اتفاق میفته اندازهگیری میشه و این واحد رو هرتز میگن. در بسیاری از کشورها، مثل آمریکا و کشورهای اروپایی، فرکانس استاندارد برق شبکهها ۵۰ یا ۶۰ هرتزه، اما در هواپیماها فرکانس معمولاً ۴۰۰ هرتزه.
دلیل این تفاوت به دو چیز مربوطه:
۱. وزن و حجم: با افزایش فرکانس، اندازه و وزن تبدیلکنندهها و تجهیزات الکترونیکی که برای این فرکانس ساخته میشن، کمتر میشه. این در هواپیماها، جایی که هر کیلوگرم اضافی خیلی مهمه، خیلی اهمیت داره.
۲. مقاومت در برابر توربولانس: فرکانس بالا به اندازهگیریهای الکتریکی در مقابل نوسانات و توربولانسهای هواپیما کمک میکنه. این باعث میشه که سیستم برق هواپیما به طور کلی پایدارتر عمل کنه.
بنابراین، با توجه به این دو عامل، انتخاب فرکانس ۴۰۰ هرتز برای هواپیماها معمولاً بهترین گزینه است."
-
rohamavation
نام: roham hesami radرهام حسامی راد
محل اقامت: 100 مایلی شمال لندن جاده آیلستون، لستر، لسترشر. LE2
عضویت : سهشنبه ۱۳۹۹/۸/۲۰ - ۰۸:۳۴
پست: 3291-
سپاس: 5494
- جنسیت:
تماس:
Re: هوافضا
عناصر اصلی تولید برق توی هواپیما شامل باتریها واحدهای قدرت کمکی (APU) ژنراتورهای متصل به موتور هواپیما و توربین هوایی قوسی (RAT) هستن که برای برق اضطراری استفاده میشن. یه سیستم الکتریکی هواپیما یه شبکه مستقل از اجزای تولید کننده انتقال توزیع استفاده و ذخیره انرژی الکتریکی داره. تصویر یک سیستم الکتریکی یه جزء لاینفک و ضروری در همه طرحها به جز ساده ترین طراحی هواپیما است. ظرفیت و پیچیدگی سیستم الکتریکی بین یه هواپیمای سبک تک پیستونی تک موتوره و یه هواپیمای جت تجاری مدرن و چند موتوره بسیار متفاوته. با این حال سیستم الکتریکی هواپیماها در هر دو انتهای طیف پیچیدگی دارای بسیاری از اجزای اساسی مشابهه. همه سیستمهای الکتریکی هواپیما دارای قطعاتی با قابلیت تولید برق هستن. بسته به هواپیما از ژنراتورها یا دینامها برای تولید برق استفاده میشه. این موتورها معمولاً با موتور کار میکنن اما ممکنه از APU موتور هیدرولیک یا توربین هوایی Ram (RAT) هم استفاده کنن. خروجی ژنراتور معمولاً 115-120V/400HZ AC 28V DC یا 14V DCهست. برق ژنراتور ممکنه بدون تغییر استفاده بشه یا از طریق ترانسفورماتورها یکسو کنندهها یا اینورترها جهت تغییر ولتاژ یا نوع جریان هدایت بشه. خروجی ژنراتور معمولاً به یک یا چند گذر توزیع هدایت میشه. قطعات جداگانه از گذرگاه با محافظت از مدار به شکل یه قطع کننده مدار یا فیوز موجود در سیمکشی تغذیه میشن. خروجی ژنراتور برای شارژ باتری (های) هواپیما هم استفاده میشه. باتریها معمولاً از انواع سربی-اسیدی یا NICAD هستن اما باتریهای لیتیومی روز به روز رایجتر میشن. از آنها برای راهاندازی هواپیما و به عنوان منبع اضطراری نیرو در صورت خرابی سیستم تولید یا توزیع استفاده میشه. سیستمهای الکتریکی اولیه هواپیما برخی از هواپیماهای تک موتوره بسیار ساده دارای سیستم برقی نیستن. موتور پیستون مجهز به سیستم جرقهزنی مگنتو است که خودکار تغذیه میشه و مخزن سوخت به گونهای قرار گرفته است که موتور را به طور گرانشی تغذیه میکنه. هواپیما با استفاده از یک چرخ دنده و میللنگ یا با "حرکت دستی" موتور راهاندازی میکنه. اگر بخواهید یک استارت برقی چراغ ابزارهای برقی پرواز وسایل ناوبری یا رادیوها وجود داشته باشه یه سیستم الکتریکی به یه ضرورت تبدیل میشه. در بیشتر موارد سیستم با استفاده از یه گذرگاه توزیع یه باتری و یه ژنراتور یا دینام با موتور واحد تغذیه DC میکنه. مقررات به شکل سوئیچ روشن/خاموش برای جدا کردن باتری از گذرگاه و جداسازی ژنراتور/دینام از گذرگاه در نظر گرفته میشه. یه آمپرمتر بار سنج یا یه چراغ هشدار هم برای نشون دادن خرابی سیستم شارژ تعبیه شده. قطعات الکتریکی به نوار باس متصل میشن که از قطعکننده مدار یا فیوزهایی برای محافظت از مدار استفاده میکنه. ممکنه مقرراتی در نظر گرفته بشه که به منبع تغذیه خارجی مثل باتری اضافی یا واحد قدرت زمینی (GPU) متصل بشه تا به استارت موتور کمک کنه یا در حالی که موتور در حال کار نیست برق رو تأمین کنه.عناصر اصلی تولید برق توی هواپیما شامل باتریها واحدهای قدرت کمکی (APU) ژنراتورهای متصل به موتور هواپیما و توربین هوایی قوسی (RAT) هستن که برای برق اضطراری استفاده میشن. یه سیستم الکتریکی هواپیما یه شبکه مستقل از اجزای تولید کننده انتقال توزیع استفاده و ذخیره انرژی الکتریکی داره. تصویر یک سیستم الکتریکی یه جزء لاینفک و ضروری در همه طرحها به جز ساده ترین طراحی هواپیما است. ظرفیت و پیچیدگی سیستم الکتریکی بین یه هواپیمای سبک تک پیستونی تک موتوره و یه هواپیمای جت تجاری مدرن و چند موتوره بسیار متفاوته. با این حال سیستم الکتریکی هواپیماها در هر دو انتهای طیف پیچیدگی دارای بسیاری از اجزای اساسی مشابهه. همه سیستمهای الکتریکی هواپیما دارای قطعاتی با قابلیت تولید برق هستن. بسته به هواپیما از ژنراتورها یا دینامها برای تولید برق استفاده میشه. این موتورها معمولاً با موتور کار میکنن اما ممکنه از APU موتور هیدرولیک یا توربین هوایی Ram (RAT) هم استفاده کنن. خروجی ژنراتور معمولاً 115-120V/400HZ AC 28V DC یا 14V DCهست. برق ژنراتور ممکنه بدون تغییر استفاده بشه یا از طریق ترانسفورماتورها یکسو کنندهها یا اینورترها جهت تغییر ولتاژ یا نوع جریان هدایت بشه. خروجی ژنراتور معمولاً به یک یا چند گذر توزیع هدایت میشه. قطعات جداگانه از گذرگاه با محافظت از مدار به شکل یه قطع کننده مدار یا فیوز موجود در سیمکشی تغذیه میشن. خروجی ژنراتور برای شارژ باتری (های) هواپیما هم استفاده میشه. باتریها معمولاً از انواع سربی-اسیدی یا NICAD هستن اما باتریهای لیتیومی روز به روز رایجتر میشن. از آنها برای راهاندازی هواپیما و به عنوان منبع اضطراری نیرو در صورت خرابی سیستم تولید یا توزیع استفاده میشه. سیستمهای الکتریکی اولیه هواپیما برخی از هواپیماهای تک موتوره بسیار ساده دارای سیستم برقی نیستن. موتور پیستون مجهز به سیستم جرقهزنی مگنتو است که خودکار تغذیه میشه و مخزن سوخت به گونهای قرار گرفته است که موتور را به طور گرانشی تغذیه میکنه. هواپیما با استفاده از یک چرخ دنده و میللنگ یا با "حرکت دستی" موتور راهاندازی میکنه. اگر بخواهید یک استارت برقی چراغ ابزارهای برقی پرواز وسایل ناوبری یا رادیوها وجود داشته باشه یه سیستم الکتریکی به یه ضرورت تبدیل میشه. در بیشتر موارد سیستم با استفاده از یه گذرگاه توزیع یه باتری و یه ژنراتور یا دینام با موتور واحد تغذیه DC میکنه. مقررات به شکل سوئیچ روشن/خاموش برای جدا کردن باتری از گذرگاه و جداسازی ژنراتور/دینام از گذرگاه در نظر گرفته میشه. یه آمپرمتر بار سنج یا یه چراغ هشدار هم برای نشون دادن خرابی سیستم شارژ تعبیه شده. قطعات الکتریکی به نوار باس متصل میشن که از قطعکننده مدار یا فیوزهایی برای محافظت از مدار استفاده میکنه. ممکنه مقرراتی در نظر گرفته بشه که به منبع تغذیه خارجی مثل باتری اضافی یا واحد قدرت زمینی (GPU) متصل بشه تا به استارت موتور کمک کنه یا در حالی که موتور در حال کار نیست برق رو تأمین کنه.
پس سیستمهای الکتریکی پیچیدهتر در هواپیماها عموما از سیستمهای ولتاژ چندگانه تشکیل شدهاند که از ترکیب اتوبوسهای AC و DC برای تأمین برق اجزای مختلف هواپیما استفاده میکنن. تولید برق اولیه معمولا به صورت AC با استفاده از یک یا چند واحد ترانسفورماتور (TRU) است که ولتاژ DC را برای تغذیه اتوبوسهای DC فراهم میکنند. تولید AC ثانویه از APU معمولا برای استفاده در زمین در صورت عدم کارکرد موتورها و برای استفاده در هوا در صورت خرابی قطعات ارائه میشود. تولید درجه سوم به شکل موتور هیدرولیک یا RAT نیز ممکن است در سیستم گنجانده شود تا در صورت بروز خرابیهای متعدد افزونگی ایجاد شود. قطعات ضروری AC و DC به اتوبوسهای خاص متصل میشوند و تقریبا در همه شرایط خرابی نیروهایی برای تأمین برق این اتوبوسها در نظر گرفته شده است. در صورت از بین رفتن تمام توان AC اینورتر استاتیک در سیستم گنجانده شده است تا گذرگاه Essential AC از باتریهای هواپیما تغذیه شود.
مقررات قوی نظارت و هشدار خرابی سیستم در سیستم الکتریکی گنجانده شده است و در صورت لزوم به خلبانان ارائه میشود. هشدارها ممکن است شامل خرابی/اختلال ژنراتور خرابی TRU خرابی باتری خرابی/اختلال اتوبوس و نظارت بر قطع کننده مدار باشد اما محدود به آن نمیشود. سازنده همچنین روشهای دقیق جداسازی سیستم الکتریکی را ارائه میدهد تا در صورت بروز آتشسوزی الکتریکی مورد استفاده قرار گیرد.
مطابق با مقررات قابل اجرا قطعاتی مانند ابزارهای آماده به کار و روشنایی مسیرهای اضطراری هواپیما دارای منبع تغذیه پشتیبان خود هستند در حالی که ژنراتورها منبع اصلی نیروی هواپیما هستند چندین منبع تکمیلی در هواپیما برای افزونگی ضروری هستند بنابراین GE بر روی تعدادی از فناوریهای جدید از جمله سلولهای سوختی خازنهای فوقالعاده و پرانرژی کار میکند. لیتیومیون با چگالی بالا.
یک هواپیما شامل دو مدار اصلی الکتریکی و یک مدار متناوب است. دو مدار یکی در هر طرف هواپیما به یک ژنراتور متصل است. این ژنراتور است که با استفاده از انرژی مکانیکی تامین شده توسط یکی از موتورها برق تولید میکند. این همان چیزی است که ما آن را تولید برق مینامیم.
در این قسمت هواپیماها از ژنراتورهایی با خروجی 115 ولت و 400 هرتز 3 فاز استفاده میشه. این هواپیما دو ژنراتور روی موتورها و ژنراتور سوم روی APU نصب شده که توسط سامانه کنترل خودکار ترمینالها میتونن به ترمینالهای مربوطه وصل بشن. ترمینالها دارای سه فاز هستن که هر فاز به مصرفکننده مربوط خود متصل میشه. در شرایط عادی ژنراتور شماره 1 ترمینال AC شماره 1 و همچنین ترمینال ضروری رو تغذیه میکنه و ژنراتور شماره 2 ترمینال AC شماره 2 رو تغذیه میکنه. ژنراتور شماره 3 هم آماده است تا در صورت از کار افتادن هر یک از ژنراتورها به طور خودکار توسط سامانه کنترلی گفته شده جایگزین ژنراتور معیوب بشه.
در صورت قطع توان ژنراتورهای اصلی ژنراتورهای اضطراری که شامل واحد توان کمکی و باتریها هستند وظیفه تأمین انرژی هواپیما رو برعهده دارن. برق جریان متناوب هواپیما در مواقع اضطراری از طریق ژنراتور APU تأمین میشه. این ژنراتور میتونه در حین پرواز جایگزین یک یا هردوی ژنراتورهای موتورگرد (اصلی) بشه.
همچنین این ژنراتور در روی زمین هم در صورت نبودن منبع ولتاژ خارجی برق هواپیما رو تأمین میکنه. برق DC هواپیما توسط دو باتری تأمین میشه که هر کدوم از آنها توان نامی ۲۳ آمپر ساعت دارن. منابع تغذیه اصولاً برای موارد راهاندازی APU در پرواز و در روی زمین و تغذیه شبکه DC/AC اضطراری استفاده میشه.
دلیل استفاده از برق ۴۰۰ هرتز در هواپیما به این دلیله که در طراحی هواپیما توافقاتی باید در نظر گرفته بشه که موازنه بهینه در خصوص راه حلها رو فراهم کنه. استفاده از سیستم برق ۴۰۰ هرتز به جای ۶۰ هرتز مزیتهایی داره از جمله کاهش وزن به منظور حصول حداکثر کارایی.
پس سیستمهای الکتریکی پیچیدهتر در هواپیماها عموما از سیستمهای ولتاژ چندگانه تشکیل شدهاند که از ترکیب اتوبوسهای AC و DC برای تأمین برق اجزای مختلف هواپیما استفاده میکنن. تولید برق اولیه معمولا به صورت AC با استفاده از یک یا چند واحد ترانسفورماتور (TRU) است که ولتاژ DC را برای تغذیه اتوبوسهای DC فراهم میکنند. تولید AC ثانویه از APU معمولا برای استفاده در زمین در صورت عدم کارکرد موتورها و برای استفاده در هوا در صورت خرابی قطعات ارائه میشود. تولید درجه سوم به شکل موتور هیدرولیک یا RAT نیز ممکن است در سیستم گنجانده شود تا در صورت بروز خرابیهای متعدد افزونگی ایجاد شود. قطعات ضروری AC و DC به اتوبوسهای خاص متصل میشوند و تقریبا در همه شرایط خرابی نیروهایی برای تأمین برق این اتوبوسها در نظر گرفته شده است. در صورت از بین رفتن تمام توان AC اینورتر استاتیک در سیستم گنجانده شده است تا گذرگاه Essential AC از باتریهای هواپیما تغذیه شود.
مقررات قوی نظارت و هشدار خرابی سیستم در سیستم الکتریکی گنجانده شده است و در صورت لزوم به خلبانان ارائه میشود. هشدارها ممکن است شامل خرابی/اختلال ژنراتور خرابی TRU خرابی باتری خرابی/اختلال اتوبوس و نظارت بر قطع کننده مدار باشد اما محدود به آن نمیشود. سازنده همچنین روشهای دقیق جداسازی سیستم الکتریکی را ارائه میدهد تا در صورت بروز آتشسوزی الکتریکی مورد استفاده قرار گیرد.
مطابق با مقررات قابل اجرا قطعاتی مانند ابزارهای آماده به کار و روشنایی مسیرهای اضطراری هواپیما دارای منبع تغذیه پشتیبان خود هستند در حالی که ژنراتورها منبع اصلی نیروی هواپیما هستند چندین منبع تکمیلی در هواپیما برای افزونگی ضروری هستند بنابراین GE بر روی تعدادی از فناوریهای جدید از جمله سلولهای سوختی خازنهای فوقالعاده و پرانرژی کار میکند. لیتیومیون با چگالی بالا.
یک هواپیما شامل دو مدار اصلی الکتریکی و یک مدار متناوب است. دو مدار یکی در هر طرف هواپیما به یک ژنراتور متصل است. این ژنراتور است که با استفاده از انرژی مکانیکی تامین شده توسط یکی از موتورها برق تولید میکند. این همان چیزی است که ما آن را تولید برق مینامیم.
در این قسمت هواپیماها از ژنراتورهایی با خروجی 115 ولت و 400 هرتز 3 فاز استفاده میشه. این هواپیما دو ژنراتور روی موتورها و ژنراتور سوم روی APU نصب شده که توسط سامانه کنترل خودکار ترمینالها میتونن به ترمینالهای مربوطه وصل بشن. ترمینالها دارای سه فاز هستن که هر فاز به مصرفکننده مربوط خود متصل میشه. در شرایط عادی ژنراتور شماره 1 ترمینال AC شماره 1 و همچنین ترمینال ضروری رو تغذیه میکنه و ژنراتور شماره 2 ترمینال AC شماره 2 رو تغذیه میکنه. ژنراتور شماره 3 هم آماده است تا در صورت از کار افتادن هر یک از ژنراتورها به طور خودکار توسط سامانه کنترلی گفته شده جایگزین ژنراتور معیوب بشه.
در صورت قطع توان ژنراتورهای اصلی ژنراتورهای اضطراری که شامل واحد توان کمکی و باتریها هستند وظیفه تأمین انرژی هواپیما رو برعهده دارن. برق جریان متناوب هواپیما در مواقع اضطراری از طریق ژنراتور APU تأمین میشه. این ژنراتور میتونه در حین پرواز جایگزین یک یا هردوی ژنراتورهای موتورگرد (اصلی) بشه.
همچنین این ژنراتور در روی زمین هم در صورت نبودن منبع ولتاژ خارجی برق هواپیما رو تأمین میکنه. برق DC هواپیما توسط دو باتری تأمین میشه که هر کدوم از آنها توان نامی ۲۳ آمپر ساعت دارن. منابع تغذیه اصولاً برای موارد راهاندازی APU در پرواز و در روی زمین و تغذیه شبکه DC/AC اضطراری استفاده میشه.
دلیل استفاده از برق ۴۰۰ هرتز در هواپیما به این دلیله که در طراحی هواپیما توافقاتی باید در نظر گرفته بشه که موازنه بهینه در خصوص راه حلها رو فراهم کنه. استفاده از سیستم برق ۴۰۰ هرتز به جای ۶۰ هرتز مزیتهایی داره از جمله کاهش وزن به منظور حصول حداکثر کارایی.
-
rohamavation
نام: roham hesami radرهام حسامی راد
محل اقامت: 100 مایلی شمال لندن جاده آیلستون، لستر، لسترشر. LE2
عضویت : سهشنبه ۱۳۹۹/۸/۲۰ - ۰۸:۳۴
پست: 3291-
سپاس: 5494
- جنسیت:
تماس:
Re: هوافضا
من سعی می کنم ساختار پایه هواپیما را که یک موتور جت به آن متصل است، در تحلیل اجزای محدود مدل کنم. از آنجایی که من فقط نگران ساختار محل نصب هستم، آن را جدا کرده ام و این تنها بخش در مدل FEA من است. من می خواهم بدانم که چگونه باید از حداکثر نیروی رانش به FEA خود استفاده کنم.
وقتی موتور جت هواپیما روشن میشه و میخواد حرکت کنه، نیروی رانش از عقب موتور به بیرون پرتاب میشه. این نیرو باعث جلوبردن هواپیما میشه. یعنی هواپیما با دفع جت از عقب، خودش رو به سمت جلو حرکت میده. اینقدرا سادهترش بگم، وقتی موتور جت گازها رو به عقب میپرتابه، هواپیما جلو میره. این اتفاق به اصطلاح "عمل و پیش" معروفه که بر اساس قانون سوم نیوتنه. در واقع هر عملی واکنش معادل و مخالف داره. اینجا هم گازهای پرتاب شده به عقب یک عمله و نیرویی که هواپیما رو جلو میبره، واکنش معادله.
وقتی یک موتور جت هواپیما را به جلو میبرد، نیروی رانش با اصطلاح "عمل و پیش" (action and reaction) عمل میکنه، که بر اساس قانون سوم نیوتن هست. این قانون میگه هر عمل، واکنش معادل و مخالف داره. در موتورهای جت، این اصل به وضوح قابل مشاهده است:
در حین احتراق و تولید جت: وقتی سوخت در موتور سوخت میشه و گازهای خروجی با سرعت زیاد از مکش جت خارج میشوند، این گازها به سمت عقب پرتاب میشوند.
حرکت به جلوی هواپیما: نیروی رانش ناشی از پرتاب گازهای خروجی، به صورت واکنشی روی هواپیما اثر میگذارد و آن را به جلو حرکت میدهد.
توضیح نیروی رانش: اگر هواپیما در حال حرکت باشد، نیروی رانش باعث حرکت به جلوی هواپیما میشود. این نیرو در جهت معکوس حرکت گازهای خروجی عمل میکند.
کشش به جلو: نیروی رانش همچنین باعث کشش به جلوی هواپیما میشود. این کشش ناشی از تداخل گازهای خروجی با هوا در جلوی هواپیماست و موتور جت انرژی از این تداخل را به دست میآورد.
در کل، نیروی رانش تولید شده توسط موتور جت به دلیل پرتاب گازهای خروجی عقب، باعث جلوبردن هواپیما و حرکت به جلو میشود. این اصل اساسی در فیزیک نیوتن بر اساس حفظ مقدار و تعادل نیروها قرار دارد.
درسته که وقتی موتور جت نیروی رانش تولید میکنه، شتابی به وجود میاره و نیروهای اینرسی کل هواپیما رو خنثی میکنه. اما این برداشت کلیتری از وضعیته.
در واقعیت، ساختار پایه ای که موتور جت به آن متصله، تحت تأثیر نیروهای اینرسی موتور جت و همچنین نیروهای جانبی مثل اصطکاک لاستیکها، جریان هوا و... قرار میگیره. پس میتونیم بگیم این ساختار به نوعی با تمامی نیروهای اعمالی به هواپیما ارتباط داره.
در مورد وارد کردن نیروی رانش در همون مکانها که موتور وصله، میشه گفت که بله، ولی با توجه به مواضع مختلف نیروها. در ابتدا، رانش بیشتر برای غلبه بر اصطکاک ایستا و سپس دینامیکی لاستیکها اعمال میشه. برای موتورهای جنگنده، هم ممکنه یک قسمت از رانش برای ایجاد شتاب مصرف بشه، ولی این موضوع به نوع هواپیما و نیازهای پروازی مربوطه بستگی داره.
در زمان برخاستن، تراست باعث ایجاد دو لحظه میشه. یکی به دلیل بازوی لحظه ای بین جتها و مرکز پسا آیرودینامیکی، و دیگری به دلیل گشتاور لحظه ای به مرکز جرم. این لحظات میتونند تأثیر گذاری در جلوه پروازی هواپیما داشته باشند.
اگر بخواهید نیرو رانش رو روی پایه اعمال کنید، بله، اما باید یک لحظه خمشی هم در نظر بگیرید. این ممان خمشی برابر با حاصلضرب رانش (T) در فاصله بین محور محور و نقاط اتصال باشد.
می دانیم که وقتی موتور جت نیروی رانش تولید می کند، شتاب تولید می کند و رانش خالص با اینرسی کل هواپیما خنثی می شود. بنابراین ساختار پایه ای که موتور جت به آن متصل است، فقط تحت نیروهای اینرسی موتور جت قرار می گیرد؟
اما در عین حال، نیروی رانش خالص وجود دارد که هواپیما را به جلو می راند. آیا باید این نیروی رانش را در همان مکانها روی پایهای که موتور وصل است وارد کنم یا خیر؟ بله یا خیر لطفا توضیح دهید ممنون
در شروع حرکت هواپیما، رانش بیشتر برای غلبه بر اصطکاک ایستا و سپس دینامیکی لاستیک ها انجام می شود، بنابراین باید لحظه را با توجه به فاصله مرکز موتورهای جت تا باند فرودگاه در نظر بگیریم (برای شما طرح).
سپس رانش بیشتر برای غلبه بر درگ و کشش انگل ناشی از لیفت انجام می شود. و کسری از رانش برای ایجاد شتاب می رود، مگر در جت های جنگنده که مقدار قابل توجهی از رانش به سمت شتاب می رود و به مرکز جرم جت جنگنده اعمال می شود.
تراست زمان برخاستن در هواپیمای جت باعث دو لحظه می شود:
یکی به دلیل بازوی لحظه ای بین جت ها و مرکز پسا آیرودینامیکی و دیگری گشتاور لحظه ای به مرکز جرم.
من فکر می کنم رانش به طور کلی همانطور که در قسمت بالای تصویر زیر نشان داده شده اعمال می شود.
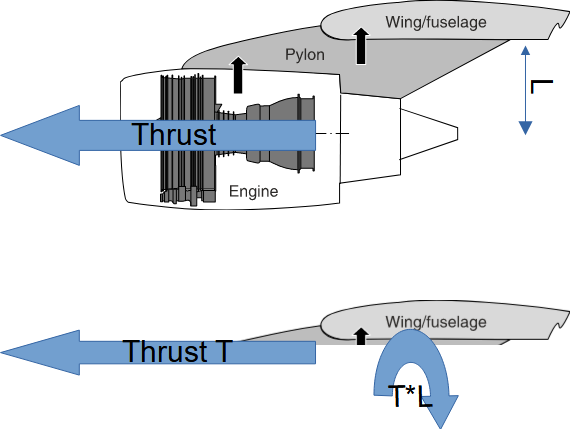
اگر میخواهید نیرو را روی پایه اعمال کنید، همان نیرو اعمال میشود، اما باید یک لحظه خمشی اضافه کنید. ممان خمشی باید برابر با حاصل ضرب رانش T، برابر فاصله بین محور محور و نقاط اتصال باشد.
وقتی موتور جت هواپیما روشن میشه و میخواد حرکت کنه، نیروی رانش از عقب موتور به بیرون پرتاب میشه. این نیرو باعث جلوبردن هواپیما میشه. یعنی هواپیما با دفع جت از عقب، خودش رو به سمت جلو حرکت میده. اینقدرا سادهترش بگم، وقتی موتور جت گازها رو به عقب میپرتابه، هواپیما جلو میره. این اتفاق به اصطلاح "عمل و پیش" معروفه که بر اساس قانون سوم نیوتنه. در واقع هر عملی واکنش معادل و مخالف داره. اینجا هم گازهای پرتاب شده به عقب یک عمله و نیرویی که هواپیما رو جلو میبره، واکنش معادله.
وقتی یک موتور جت هواپیما را به جلو میبرد، نیروی رانش با اصطلاح "عمل و پیش" (action and reaction) عمل میکنه، که بر اساس قانون سوم نیوتن هست. این قانون میگه هر عمل، واکنش معادل و مخالف داره. در موتورهای جت، این اصل به وضوح قابل مشاهده است:
در حین احتراق و تولید جت: وقتی سوخت در موتور سوخت میشه و گازهای خروجی با سرعت زیاد از مکش جت خارج میشوند، این گازها به سمت عقب پرتاب میشوند.
حرکت به جلوی هواپیما: نیروی رانش ناشی از پرتاب گازهای خروجی، به صورت واکنشی روی هواپیما اثر میگذارد و آن را به جلو حرکت میدهد.
توضیح نیروی رانش: اگر هواپیما در حال حرکت باشد، نیروی رانش باعث حرکت به جلوی هواپیما میشود. این نیرو در جهت معکوس حرکت گازهای خروجی عمل میکند.
کشش به جلو: نیروی رانش همچنین باعث کشش به جلوی هواپیما میشود. این کشش ناشی از تداخل گازهای خروجی با هوا در جلوی هواپیماست و موتور جت انرژی از این تداخل را به دست میآورد.
در کل، نیروی رانش تولید شده توسط موتور جت به دلیل پرتاب گازهای خروجی عقب، باعث جلوبردن هواپیما و حرکت به جلو میشود. این اصل اساسی در فیزیک نیوتن بر اساس حفظ مقدار و تعادل نیروها قرار دارد.
درسته که وقتی موتور جت نیروی رانش تولید میکنه، شتابی به وجود میاره و نیروهای اینرسی کل هواپیما رو خنثی میکنه. اما این برداشت کلیتری از وضعیته.
در واقعیت، ساختار پایه ای که موتور جت به آن متصله، تحت تأثیر نیروهای اینرسی موتور جت و همچنین نیروهای جانبی مثل اصطکاک لاستیکها، جریان هوا و... قرار میگیره. پس میتونیم بگیم این ساختار به نوعی با تمامی نیروهای اعمالی به هواپیما ارتباط داره.
در مورد وارد کردن نیروی رانش در همون مکانها که موتور وصله، میشه گفت که بله، ولی با توجه به مواضع مختلف نیروها. در ابتدا، رانش بیشتر برای غلبه بر اصطکاک ایستا و سپس دینامیکی لاستیکها اعمال میشه. برای موتورهای جنگنده، هم ممکنه یک قسمت از رانش برای ایجاد شتاب مصرف بشه، ولی این موضوع به نوع هواپیما و نیازهای پروازی مربوطه بستگی داره.
در زمان برخاستن، تراست باعث ایجاد دو لحظه میشه. یکی به دلیل بازوی لحظه ای بین جتها و مرکز پسا آیرودینامیکی، و دیگری به دلیل گشتاور لحظه ای به مرکز جرم. این لحظات میتونند تأثیر گذاری در جلوه پروازی هواپیما داشته باشند.
اگر بخواهید نیرو رانش رو روی پایه اعمال کنید، بله، اما باید یک لحظه خمشی هم در نظر بگیرید. این ممان خمشی برابر با حاصلضرب رانش (T) در فاصله بین محور محور و نقاط اتصال باشد.
می دانیم که وقتی موتور جت نیروی رانش تولید می کند، شتاب تولید می کند و رانش خالص با اینرسی کل هواپیما خنثی می شود. بنابراین ساختار پایه ای که موتور جت به آن متصل است، فقط تحت نیروهای اینرسی موتور جت قرار می گیرد؟
اما در عین حال، نیروی رانش خالص وجود دارد که هواپیما را به جلو می راند. آیا باید این نیروی رانش را در همان مکانها روی پایهای که موتور وصل است وارد کنم یا خیر؟ بله یا خیر لطفا توضیح دهید ممنون
در شروع حرکت هواپیما، رانش بیشتر برای غلبه بر اصطکاک ایستا و سپس دینامیکی لاستیک ها انجام می شود، بنابراین باید لحظه را با توجه به فاصله مرکز موتورهای جت تا باند فرودگاه در نظر بگیریم (برای شما طرح).
سپس رانش بیشتر برای غلبه بر درگ و کشش انگل ناشی از لیفت انجام می شود. و کسری از رانش برای ایجاد شتاب می رود، مگر در جت های جنگنده که مقدار قابل توجهی از رانش به سمت شتاب می رود و به مرکز جرم جت جنگنده اعمال می شود.
تراست زمان برخاستن در هواپیمای جت باعث دو لحظه می شود:
یکی به دلیل بازوی لحظه ای بین جت ها و مرکز پسا آیرودینامیکی و دیگری گشتاور لحظه ای به مرکز جرم.
من فکر می کنم رانش به طور کلی همانطور که در قسمت بالای تصویر زیر نشان داده شده اعمال می شود.
اگر میخواهید نیرو را روی پایه اعمال کنید، همان نیرو اعمال میشود، اما باید یک لحظه خمشی اضافه کنید. ممان خمشی باید برابر با حاصل ضرب رانش T، برابر فاصله بین محور محور و نقاط اتصال باشد.