
در هواپیماها اگر مرکز بالابر پشت مرکز ثقل باشد، پایداری طولی حفظ میشود.
آیا هلیکوپترها نیز معیارهای پایداری دارند؟
دارای روتور اصلی و دم هستند. ثبات چگونه تحت تأثیر موقعیت مکانی آنها قرار می گیرد؟
آیا مرکز روتور اصلی همیشه با مرکز بالابر مطابقت دارد؟
من خوانده ام که هواپیما از هلیکوپتر پایدارتر است. .در شناور، هلیکوپترها ناپایدار هستند و هیچ کاری نمی توان برای آن انجام داد. زیرا بالابر هنوز در امتداد شفت است، اما مرکز پسا زیر مرکز رانش است و باعث بی ثباتی گشتاور می شود.
در پرواز رو به جلو، تیغه پیشروی بالابر بیشتری ایجاد می کند (مگر اینکه چرخه ای با آن مقابله کند)، که باعث می شود روتور به سمت بالا حرکت کند (تیغه به دلیل اثر ژیروسکوپی بعداً حدود 90 درجه به بالاترین نقطه می رسد)، ایجاد گشتاور تثبیت کننده ای که بر ممان بی ثبات کننده مرکز پایین غلبه می کند. کشش بالاتر از سرعت معین با این حال، هیچ راه آیرودینامیکی برای کاهش سرعت مانند هواپیماها وجود ندارد (البته فنرهای قابل تنظیم در سیستم کنترل وجود دارد).
معیارهای پایداری بالگردها چیست؟
-
rohamavation

نام: roham hesami radرهام حسامی راد
محل اقامت: 100 مایلی شمال لندن جاده آیلستون، لستر، لسترشر. LE2
عضویت : سهشنبه ۱۳۹۹/۸/۲۰ - ۰۸:۳۴
پست: 3286-
سپاس: 5494
- جنسیت:
تماس:
-
rohamavation
نام: roham hesami radرهام حسامی راد
محل اقامت: 100 مایلی شمال لندن جاده آیلستون، لستر، لسترشر. LE2
عضویت : سهشنبه ۱۳۹۹/۸/۲۰ - ۰۸:۳۴
پست: 3286-
سپاس: 5494
- جنسیت:
تماس:
Re: معیارهای پایداری بالگردها چیست؟
خوبپایداری به رفتار هلیکوپتر پس از اختلال در شرایط پرواز ثابت اشاره داره. به عنوان مثال، پس از برخورد باد به هلیکوپتر معلق چه اتفاقی می افتد. چنین اختلالاتی سرعت هلیکوپتر را تغییر میده و باعث حرکت گام، چرخش و/یا انحراف میشه
پس انواع مختلف پایداری در هلیکوپتر چیست؟
دو نوع ثبات وجود داره. پویا و ایستا اگر مثلاً وزش باد، هواپیما را دچار اختلال کنه از وضعیت خود منحرف میشه، اما بلافاصله و بدون ورودی های کنترلی به حالت اولیه خود باز می گرده. این ثبات استاتیکی مثبت است
یک هلیکوپتر با ایجاد تعادل بین نیروهای خارجی ثابت می ماند. هیچ نیروی افقی وجود ندارد، زیرا هلیکوپتر به چپ یا راست حرکت نمی کند، بنابراین هیچ نیروی کششی یا افقی وجود ندارد. تیغهها یک بالابر عمودی ایجاد میکنند و زمانی که دقیقاً با نیروی گرانش متعادل شود، هلیکوپتر ثابت میمونه
پس انواع مختلف پایداری در هلیکوپتر چیست؟
دو نوع ثبات وجود داره. پویا و ایستا اگر مثلاً وزش باد، هواپیما را دچار اختلال کنه از وضعیت خود منحرف میشه، اما بلافاصله و بدون ورودی های کنترلی به حالت اولیه خود باز می گرده. این ثبات استاتیکی مثبت است
یک هلیکوپتر با ایجاد تعادل بین نیروهای خارجی ثابت می ماند. هیچ نیروی افقی وجود ندارد، زیرا هلیکوپتر به چپ یا راست حرکت نمی کند، بنابراین هیچ نیروی کششی یا افقی وجود ندارد. تیغهها یک بالابر عمودی ایجاد میکنند و زمانی که دقیقاً با نیروی گرانش متعادل شود، هلیکوپتر ثابت میمونه

-
rohamavation
نام: roham hesami radرهام حسامی راد
محل اقامت: 100 مایلی شمال لندن جاده آیلستون، لستر، لسترشر. LE2
عضویت : سهشنبه ۱۳۹۹/۸/۲۰ - ۰۸:۳۴
پست: 3286-
سپاس: 5494
- جنسیت:
تماس:
Re: معیارهای پایداری بالگردها چیست؟
ببینید من خوندم که کلا دو نوع پایداری وجود داره. پویا و ایستا
اگر مثلاً وزش باد، هواپیما را دچار اختلال کند، از وضعیت خود منحرف می شود، اما بلافاصله و بدون ورودی های کنترلی به حالت اولیه خود باز می گردد. این ثبات استاتیکی مثبت است. اگر در حالت آشفته باقی بماند مگر اینکه اصلاح شود، پایداری استاتیکی خنثی دارد. اگر به انحراف ادامه دهد، ثبات استاتیکی منفی دارد.
اگر هواپیما به حالت اولیه خود برگردد، کمی بیش از حد عبور کند، سپس اصلاح کند، کمی کمتر از حد معمول عبور کند و غیره، در نهایت به حالت اولیه خود بازگردد، آنگاه پایداری دینامیکی مثبت دارد. اگر این نوسانات ادامه پیدا کند و تا زمانی که حالت اولیه به دست نیامده است، «نم نکند»، آنگاه پایداری دینامیکی خنثی دارد. اگر نوسانات به طور فزاینده ای بزرگ شوند، پایداری دینامیکی منفی دارد.
برای هلیکوپترها، آنهایی که دارای خلبان خودکار، کنترل های هیدرولیک و سیستم های تقویت پایداری هستند را نادیده خواهم گرفت.
تصور کنید شناور هستید. وزش باد به هلیکوپتر می زند. دیسک از وزش طلاطم دور میشود و هلیکوپتر با وزش باد حرکت میکند. هنگامی که وزش باد متوقف می شود، دیسک اکنون جریان هوا را از جهت مخالف تجربه می کند، زیرا اکنون به طرفین حرکت می کند. دیسک به سمت عقب برمیگردد و به حالت خنثی بازمیگردد، اما بدنه مانند آونگی عمل میکند که زیر دیسک آویزان است و حرکت آن باعث میشود تا بیشتر به سمت بیرون حرکت کند، دیسک را بیشتر کج کند و باعث شود هلیکوپتر سریعتر در جهت مخالف حرکت کند. برای بازگشت به نگرش اولیه، هجوم بیشتری لازم است. در نهایت، جریان هوا اکنون از جهتی میآید که هلیکوپتر در آن حرکت میکند، بنابراین دیسک دور میشود، بدنه بیش از حد تاب میخورد و... مگر اینکه اصلاح شود، به چرخش به سمت عقب و جلو، غلتیدن، خمیازه کشیدن و پیچیدن ادامه میدهد. از نظر ایستا پایدار است (زیرا تمایل دارد به حالت اصلی بازگرده) اما از نظر پویایی ناپایداره زیرا همچنان از نگرش اولیه به عقب و جلو می چرخه.
در پرواز رو به جلو (و مگر اینکه بخواهید بدانید، من از جزئیاتی که شامل جهت وزش تندباد، تمایل بدنه به آب و هوا و "باد برگشتی" است صرف نظر می کنم، زیرا همه جزئیات در مورد اینکه دیسک به کدام سمت می چرخد و به کدام سمت می رود. هلیکوپتر از لحاظ استاتیکی پایدار است و از نظر دینامیکی در انحراف پایدار است و از نظر استاتیکی پایدار و از نظر دینامیکی در زمین و چرخش ناپایدار است.
می توانید پاهای خود را از روی پدال بگیرید و هواپیما در حالت انحراف پایدار خواهد بود. می توانید دست خود را از روی دسته بردارید (اگرچه هرگز نباید این کار را انجام دهید - اگر موتور خاموش شود، به آن اهرم سریع نیاز دارید) و در همان حالتی که هست باقی می ماند و شاید لرزش را نادیده بگیرید که باعث می شود در نهایت به سمت بالا یا پایین حرکت کند.
شما نمی توانید دست خود را از چرخه بردارید زیرا این کنترلی است که گام و چرخش را تعیین می کند و ناپایداری دینامیکی را به طور ثابت تصحیح می کند.
در یک هلیکوپتر سبک، در عرض یکی دو ثانیه از کنترل خارج می شوید. در یک زمان سنگین، شاید سه یا چهار ثانیه.
به طور خلاصه، یک هلیکوپتر در هر سه محور در پرواز رو به جلو و شناور بهجز انحراف در پرواز رو به جلو که از نظر دینامیکی پایدار است، از نظر استاتیکی پایدار و از نظر دینامیکی ناپایدار است.
اگر مثلاً وزش باد، هواپیما را دچار اختلال کند، از وضعیت خود منحرف می شود، اما بلافاصله و بدون ورودی های کنترلی به حالت اولیه خود باز می گردد. این ثبات استاتیکی مثبت است. اگر در حالت آشفته باقی بماند مگر اینکه اصلاح شود، پایداری استاتیکی خنثی دارد. اگر به انحراف ادامه دهد، ثبات استاتیکی منفی دارد.
اگر هواپیما به حالت اولیه خود برگردد، کمی بیش از حد عبور کند، سپس اصلاح کند، کمی کمتر از حد معمول عبور کند و غیره، در نهایت به حالت اولیه خود بازگردد، آنگاه پایداری دینامیکی مثبت دارد. اگر این نوسانات ادامه پیدا کند و تا زمانی که حالت اولیه به دست نیامده است، «نم نکند»، آنگاه پایداری دینامیکی خنثی دارد. اگر نوسانات به طور فزاینده ای بزرگ شوند، پایداری دینامیکی منفی دارد.
برای هلیکوپترها، آنهایی که دارای خلبان خودکار، کنترل های هیدرولیک و سیستم های تقویت پایداری هستند را نادیده خواهم گرفت.
تصور کنید شناور هستید. وزش باد به هلیکوپتر می زند. دیسک از وزش طلاطم دور میشود و هلیکوپتر با وزش باد حرکت میکند. هنگامی که وزش باد متوقف می شود، دیسک اکنون جریان هوا را از جهت مخالف تجربه می کند، زیرا اکنون به طرفین حرکت می کند. دیسک به سمت عقب برمیگردد و به حالت خنثی بازمیگردد، اما بدنه مانند آونگی عمل میکند که زیر دیسک آویزان است و حرکت آن باعث میشود تا بیشتر به سمت بیرون حرکت کند، دیسک را بیشتر کج کند و باعث شود هلیکوپتر سریعتر در جهت مخالف حرکت کند. برای بازگشت به نگرش اولیه، هجوم بیشتری لازم است. در نهایت، جریان هوا اکنون از جهتی میآید که هلیکوپتر در آن حرکت میکند، بنابراین دیسک دور میشود، بدنه بیش از حد تاب میخورد و... مگر اینکه اصلاح شود، به چرخش به سمت عقب و جلو، غلتیدن، خمیازه کشیدن و پیچیدن ادامه میدهد. از نظر ایستا پایدار است (زیرا تمایل دارد به حالت اصلی بازگرده) اما از نظر پویایی ناپایداره زیرا همچنان از نگرش اولیه به عقب و جلو می چرخه.
در پرواز رو به جلو (و مگر اینکه بخواهید بدانید، من از جزئیاتی که شامل جهت وزش تندباد، تمایل بدنه به آب و هوا و "باد برگشتی" است صرف نظر می کنم، زیرا همه جزئیات در مورد اینکه دیسک به کدام سمت می چرخد و به کدام سمت می رود. هلیکوپتر از لحاظ استاتیکی پایدار است و از نظر دینامیکی در انحراف پایدار است و از نظر استاتیکی پایدار و از نظر دینامیکی در زمین و چرخش ناپایدار است.
می توانید پاهای خود را از روی پدال بگیرید و هواپیما در حالت انحراف پایدار خواهد بود. می توانید دست خود را از روی دسته بردارید (اگرچه هرگز نباید این کار را انجام دهید - اگر موتور خاموش شود، به آن اهرم سریع نیاز دارید) و در همان حالتی که هست باقی می ماند و شاید لرزش را نادیده بگیرید که باعث می شود در نهایت به سمت بالا یا پایین حرکت کند.
شما نمی توانید دست خود را از چرخه بردارید زیرا این کنترلی است که گام و چرخش را تعیین می کند و ناپایداری دینامیکی را به طور ثابت تصحیح می کند.
در یک هلیکوپتر سبک، در عرض یکی دو ثانیه از کنترل خارج می شوید. در یک زمان سنگین، شاید سه یا چهار ثانیه.
به طور خلاصه، یک هلیکوپتر در هر سه محور در پرواز رو به جلو و شناور بهجز انحراف در پرواز رو به جلو که از نظر دینامیکی پایدار است، از نظر استاتیکی پایدار و از نظر دینامیکی ناپایدار است.
-
rohamavation
نام: roham hesami radرهام حسامی راد
محل اقامت: 100 مایلی شمال لندن جاده آیلستون، لستر، لسترشر. LE2
عضویت : سهشنبه ۱۳۹۹/۸/۲۰ - ۰۸:۳۴
پست: 3286-
سپاس: 5494
- جنسیت:
تماس:
Re: معیارهای پایداری بالگردها چیست؟
پایداری آیرودینامیکی به صورت زیر تعریف میشه
وقتی که بر اثر اختلال در تعادل یک گشتاور آیرودینامیکی ظاهر میشه که هواپیما را وادار به بازگشت به حالت تعادل می کنه از نظر ایستا پایدار است.
اگر حرکتی وجود داشته باشد که به موقعیت تعادل بازگرده با میرایی کافی برای قرار گرفتن در موقعیت تعادل جدید از نظر دینامیکی پایدار
بنابراین پایداری استاتیک نیروها را در نظر می گیره پایداری دینامیکی پاسخ های حرکتی را در طول زمان ناشی از نیروها در نظر می گیرده پایداری استاتیکی شرط لازم برای پایداری دینامیکی است.
پس هلیکوپترها از نظر آیرودینامیکی در زمین ناپایدار هستند و در شناور می چرخند. در انحراف، هوا در شناور هوا خواهد شد.
پایداری در پرواز جلو:
گام: از نظر استاتیکی ناپایدار است، مگر اینکه یک تثبیت کننده افقی نصب شده باشد که پایداری استاتیکی و دینامیکی را با افزایش سرعت رو به جلو فراهم کند.
رول: از نظر استاتیکی ناپایدار. با این حال، تثبیت غلتکی/لغزشی از زاویه مخروطی روتور وجود دارد که مشابه دو وجهی برای هواپیماهای بال ثابت است.
Yaw: از نظر استاتیکی و دینامیکی پایدار است. اگر یک دم عمودی نصب شده باشد، واضح است - اگر نه، روتور دم دقیقاً همان تمایلات تثبیت کننده یک دم عمودی را ارائه میدن امیدوارم براتون جذاب باشه رهام حسامی مشهد
وقتی که بر اثر اختلال در تعادل یک گشتاور آیرودینامیکی ظاهر میشه که هواپیما را وادار به بازگشت به حالت تعادل می کنه از نظر ایستا پایدار است.
اگر حرکتی وجود داشته باشد که به موقعیت تعادل بازگرده با میرایی کافی برای قرار گرفتن در موقعیت تعادل جدید از نظر دینامیکی پایدار
بنابراین پایداری استاتیک نیروها را در نظر می گیره پایداری دینامیکی پاسخ های حرکتی را در طول زمان ناشی از نیروها در نظر می گیرده پایداری استاتیکی شرط لازم برای پایداری دینامیکی است.
پس هلیکوپترها از نظر آیرودینامیکی در زمین ناپایدار هستند و در شناور می چرخند. در انحراف، هوا در شناور هوا خواهد شد.
پایداری در پرواز جلو:
گام: از نظر استاتیکی ناپایدار است، مگر اینکه یک تثبیت کننده افقی نصب شده باشد که پایداری استاتیکی و دینامیکی را با افزایش سرعت رو به جلو فراهم کند.
رول: از نظر استاتیکی ناپایدار. با این حال، تثبیت غلتکی/لغزشی از زاویه مخروطی روتور وجود دارد که مشابه دو وجهی برای هواپیماهای بال ثابت است.
Yaw: از نظر استاتیکی و دینامیکی پایدار است. اگر یک دم عمودی نصب شده باشد، واضح است - اگر نه، روتور دم دقیقاً همان تمایلات تثبیت کننده یک دم عمودی را ارائه میدن امیدوارم براتون جذاب باشه رهام حسامی مشهد
-
rohamavation
نام: roham hesami radرهام حسامی راد
محل اقامت: 100 مایلی شمال لندن جاده آیلستون، لستر، لسترشر. LE2
عضویت : سهشنبه ۱۳۹۹/۸/۲۰ - ۰۸:۳۴
پست: 3286-
سپاس: 5494
- جنسیت:
تماس:
Re: معیارهای پایداری بالگردها چیست؟
حتما این سوالات براتون پیش میاد
میرایی روتور چیست و چگونه بر پایداری هلیکوپتر تأثیر می گذارد؟
منظور از میرایی روتور (از نظر هلیکوپتر) چیست؟
چگونه تحت تأثیر چگالی هوا قرار می گیرد؟
پایداری هلیکوپتر چگونه به میرایی روتور بستگی دارد؟
شما در مورد میرایی سوال می کنید. هنگام برخورد با دینامیک سازه یا پدیده ارتعاشی باید میرایی در نظر گرفته بشه در روتور هلیکوپتر، چندین پدیده می تواند منجر به ارتعاش بشه. برای مثال :
تفاوت در خواص تیغه (عمدتا جرم، اما همچنین سفتی)
عدم تعادل روتور به دلیل عدم قطعیت ماشینکاری
بلبرینگ
موتور، که ممکن است به نوعی نوسانات گشتاور ایجاد کند
گیربکس، که ممکن است نوسانات نیز ایجاد کنه خوب ارتعاشات توری چرخ دنده
عملیات هلیکوپتر (اگر تغییرات سریعی در مسیر پرواز دارین ممکن است منجر به افزایش یا کاهش نیاز به بالابر شود که باعث ایجاد نوسانات گشتاور در خط حرکت می شود)
به طور خلاصه، پدیده های متعدد می توانند روتور را تحریک کنند. مانند هر سازه، هلیکوپتر دارای الگوهای ارتعاشی طبیعی به نام حالت طبیعی است که با فرکانس های طبیعی مرتبط است. با این حال، اگر یک جزء را به اندازه کافی در فرکانس طبیعی آن تحریک کنید، ممکن است منجر به خرابی خستگی شود، بنابراین میرایی بسیار مهم است.
تا آنجا که من میدونم و خوندم قابل مشاهده ترین فناوری مورد استفاده برای افزایش میرایی در روتور هلیکوپتر، دمپرهای ریشه تیغه هستند. فناوریهای متعددی وجود دارند، با این حال به نظر میرسد که آنها همان پدیده را خنثی میکنند: حرکات لبهای تیغه یا به اصطلاح حرکات لید-لگ یا حرکات شکار.
به دمپرهای نیمه فعال می پردازد تا حرکات خمشی لبه تیغه را کنترل کند تا محدودیت های هاب کاهش یابد. اساساً، اگر تیغه به طور مکانیکی به توپی ثابت شود، محدودیتهای بزرگی ممکن است به دلیل بارهای ارتعاشی رخ دهد که به عنوان مثال منجر به شکست خستگی میشه رابط بین توپی و تیغه یک رابط استوانهای است که امکان حرکت چرخشی درون صفحه را فراهم میکند. سپس سیستم میراگر (سفتی-) برای جذب انرژی جنبشی تیغه به منظور محدود کردن بارهای روی توپی استفاده میشود که به کاهش وزن کلی آن کمک میکند.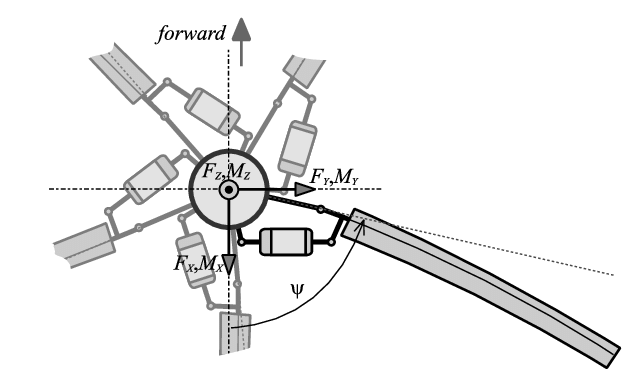
شکل ببینید مفاهیم کلی تری را در مورد فناوری های درگیر در روتور هلیکوپتر ارائه می کند. در اینجا تصویر خوبی از یک روتور مفصلی کامل است. سایر فن آوری های روتور وجود دارد: روتورهای نیمه صلب یا صلب اما آنها از استراتژی متفاوتی برای کاهش ارتعاش و اتصال تیغه هاب استفاده می کنند.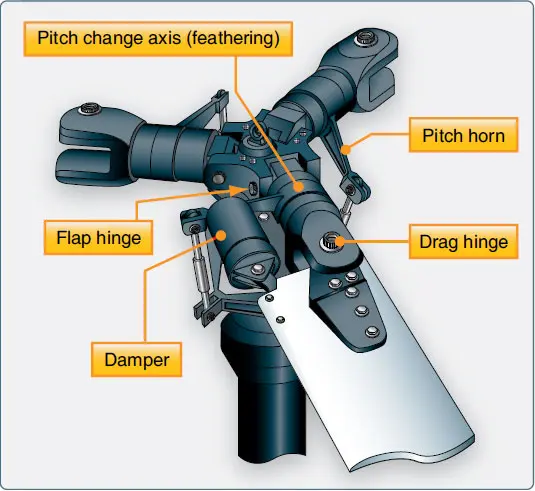
میرایی روتور چیست و چگونه بر پایداری هلیکوپتر تأثیر می گذارد؟
منظور از میرایی روتور (از نظر هلیکوپتر) چیست؟
چگونه تحت تأثیر چگالی هوا قرار می گیرد؟
پایداری هلیکوپتر چگونه به میرایی روتور بستگی دارد؟
شما در مورد میرایی سوال می کنید. هنگام برخورد با دینامیک سازه یا پدیده ارتعاشی باید میرایی در نظر گرفته بشه در روتور هلیکوپتر، چندین پدیده می تواند منجر به ارتعاش بشه. برای مثال :
تفاوت در خواص تیغه (عمدتا جرم، اما همچنین سفتی)
عدم تعادل روتور به دلیل عدم قطعیت ماشینکاری
بلبرینگ
موتور، که ممکن است به نوعی نوسانات گشتاور ایجاد کند
گیربکس، که ممکن است نوسانات نیز ایجاد کنه خوب ارتعاشات توری چرخ دنده
عملیات هلیکوپتر (اگر تغییرات سریعی در مسیر پرواز دارین ممکن است منجر به افزایش یا کاهش نیاز به بالابر شود که باعث ایجاد نوسانات گشتاور در خط حرکت می شود)
به طور خلاصه، پدیده های متعدد می توانند روتور را تحریک کنند. مانند هر سازه، هلیکوپتر دارای الگوهای ارتعاشی طبیعی به نام حالت طبیعی است که با فرکانس های طبیعی مرتبط است. با این حال، اگر یک جزء را به اندازه کافی در فرکانس طبیعی آن تحریک کنید، ممکن است منجر به خرابی خستگی شود، بنابراین میرایی بسیار مهم است.
تا آنجا که من میدونم و خوندم قابل مشاهده ترین فناوری مورد استفاده برای افزایش میرایی در روتور هلیکوپتر، دمپرهای ریشه تیغه هستند. فناوریهای متعددی وجود دارند، با این حال به نظر میرسد که آنها همان پدیده را خنثی میکنند: حرکات لبهای تیغه یا به اصطلاح حرکات لید-لگ یا حرکات شکار.
به دمپرهای نیمه فعال می پردازد تا حرکات خمشی لبه تیغه را کنترل کند تا محدودیت های هاب کاهش یابد. اساساً، اگر تیغه به طور مکانیکی به توپی ثابت شود، محدودیتهای بزرگی ممکن است به دلیل بارهای ارتعاشی رخ دهد که به عنوان مثال منجر به شکست خستگی میشه رابط بین توپی و تیغه یک رابط استوانهای است که امکان حرکت چرخشی درون صفحه را فراهم میکند. سپس سیستم میراگر (سفتی-) برای جذب انرژی جنبشی تیغه به منظور محدود کردن بارهای روی توپی استفاده میشود که به کاهش وزن کلی آن کمک میکند.
شکل ببینید مفاهیم کلی تری را در مورد فناوری های درگیر در روتور هلیکوپتر ارائه می کند. در اینجا تصویر خوبی از یک روتور مفصلی کامل است. سایر فن آوری های روتور وجود دارد: روتورهای نیمه صلب یا صلب اما آنها از استراتژی متفاوتی برای کاهش ارتعاش و اتصال تیغه هاب استفاده می کنند.
-
rohamavation
نام: roham hesami radرهام حسامی راد
محل اقامت: 100 مایلی شمال لندن جاده آیلستون، لستر، لسترشر. LE2
عضویت : سهشنبه ۱۳۹۹/۸/۲۰ - ۰۸:۳۴
پست: 3286-
سپاس: 5494
- جنسیت:
تماس:
Re: معیارهای پایداری بالگردها چیست؟
چگونه هلیکوپتر را در نزدیکی زمین ثابت نگه داریم؟
وقتی هلیکوپترخیلی نزدیک به زمین است، اثر زمین و بالشتک هوایی تقریباً 3-6 اینچی رامیفهمم. با این حساب، سوالات من این است:
چرا هلیکوپتر در نزدیکی زمین به طور ذاتی ناپایدار می شود؟
چه روش هایی برای صاف نگه داشتن آن هنگام کار در نزدیکی زمین وجود دارد؟
اثر زمین می تونه به عنوان افزایش فشار هوا در زیر سطح بالابر دیده شود زیرا هوای پایین جریان نمی تواند از طریق زمین جریان یابد.
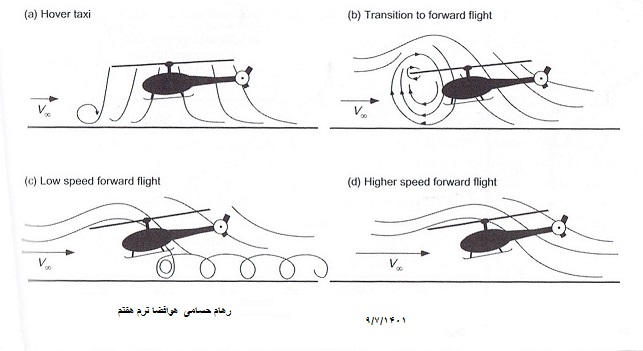
در شناور جریان هوای پایین جریان بسیار مطیع است، با چرخش های آشفته تنها در انتقال به پرواز رو به جلو در اثر زمینی رخ می دهد. هلیکوپترهای مقیاس کامل ذاتاً با یک دوره فرکانس ویژه در حد چند ثانیه ناپایدار هستند و افزایش ناپایداری واقعاً تحت تأثیر اثر زمینی قرار نمی گیرد: مقدار بالابر با اقدام خلبان نسبتاً ثابت نگه داشته می شود و اثر زمین عمدتاً خود را به عنوان نشان می دهد. کاهش درگ القایی
بنابراین برای هلیکوپترهای مقیاس کامل، قابلیت کنترل زمین/غلبه هلیکوپتر (بسیار) در اثر زمینی تغییر نمی کند. بسته به اجسام روی زمین و شیب زمین، میتوان تغییراتی در تریم ایجاد کرد، زیرا برای مثال، افزایش فشار بر دم افقی تأثیر میگذارد، اما این تغییرات اساساً دوره فرکانس ویژه را تغییر نمیدهند.
برای هلیکوپترهای مدل، شناور شدن در اثر زمین کار بسیار دشوارتری است: دوره پره های تکرار شونده باعث افزایش موقت فشار ناشی از ایجاد بالابر می شود.
همانطور که در تئوری فرض شده است، اثر زمینی در واقع یک جریان ثابت نیستش، بلکه جریانی با نوسانات در مقیاس بزرگ است که توسط ناظری که در نزدیکی هلیکوپتر ایستاده است، می تواند به صورت تندباد احساس شود. حدس میزنم که این نوسانات با گردابی مرتبطه که از گردابهای منفرد از ریشههای تیغه تشکیل شدن. این گرداب ظاهراً مانند یک مار در امتداد زمین میپیچد و باعث میشه که کل پیت جابجا شده و تکان بخورد.
از آنجایی که مدلهای مقیاس دارای چرخش بالاتری نسبت به هلیکوپترهای مقیاس کامل هستند، فرکانس و توزیع این گردابها ممکن است باعث ناپایداری بالاتر برای شناور شدن شود.
وقتی هلیکوپترخیلی نزدیک به زمین است، اثر زمین و بالشتک هوایی تقریباً 3-6 اینچی رامیفهمم. با این حساب، سوالات من این است:
چرا هلیکوپتر در نزدیکی زمین به طور ذاتی ناپایدار می شود؟
چه روش هایی برای صاف نگه داشتن آن هنگام کار در نزدیکی زمین وجود دارد؟
اثر زمین می تونه به عنوان افزایش فشار هوا در زیر سطح بالابر دیده شود زیرا هوای پایین جریان نمی تواند از طریق زمین جریان یابد.
در شناور جریان هوای پایین جریان بسیار مطیع است، با چرخش های آشفته تنها در انتقال به پرواز رو به جلو در اثر زمینی رخ می دهد. هلیکوپترهای مقیاس کامل ذاتاً با یک دوره فرکانس ویژه در حد چند ثانیه ناپایدار هستند و افزایش ناپایداری واقعاً تحت تأثیر اثر زمینی قرار نمی گیرد: مقدار بالابر با اقدام خلبان نسبتاً ثابت نگه داشته می شود و اثر زمین عمدتاً خود را به عنوان نشان می دهد. کاهش درگ القایی
بنابراین برای هلیکوپترهای مقیاس کامل، قابلیت کنترل زمین/غلبه هلیکوپتر (بسیار) در اثر زمینی تغییر نمی کند. بسته به اجسام روی زمین و شیب زمین، میتوان تغییراتی در تریم ایجاد کرد، زیرا برای مثال، افزایش فشار بر دم افقی تأثیر میگذارد، اما این تغییرات اساساً دوره فرکانس ویژه را تغییر نمیدهند.
برای هلیکوپترهای مدل، شناور شدن در اثر زمین کار بسیار دشوارتری است: دوره پره های تکرار شونده باعث افزایش موقت فشار ناشی از ایجاد بالابر می شود.
همانطور که در تئوری فرض شده است، اثر زمینی در واقع یک جریان ثابت نیستش، بلکه جریانی با نوسانات در مقیاس بزرگ است که توسط ناظری که در نزدیکی هلیکوپتر ایستاده است، می تواند به صورت تندباد احساس شود. حدس میزنم که این نوسانات با گردابی مرتبطه که از گردابهای منفرد از ریشههای تیغه تشکیل شدن. این گرداب ظاهراً مانند یک مار در امتداد زمین میپیچد و باعث میشه که کل پیت جابجا شده و تکان بخورد.
از آنجایی که مدلهای مقیاس دارای چرخش بالاتری نسبت به هلیکوپترهای مقیاس کامل هستند، فرکانس و توزیع این گردابها ممکن است باعث ناپایداری بالاتر برای شناور شدن شود.
-
rohamavation
نام: roham hesami radرهام حسامی راد
محل اقامت: 100 مایلی شمال لندن جاده آیلستون، لستر، لسترشر. LE2
عضویت : سهشنبه ۱۳۹۹/۸/۲۰ - ۰۸:۳۴
پست: 3286-
سپاس: 5494
- جنسیت:
تماس:
Re: معیارهای پایداری بالگردها چیست؟
تا به حال Autorotation شنیدین چرخش خودکار شرایطی از پرواز هلیکوپتر است که در طی آن روتور اصلی هلیکوپتر تنها توسط نیروهای آیرودینامیکی بدون نیروی موتور به حرکت در می آید. این مانوری است که در آن موتور از سیستم روتور اصلی جدا می شود و تیغه های روتور صرفاً توسط جریان هوا به سمت بالا از طریق روتور به حرکت در می آیند.شرایطی در پرواز است که پروانهٔ اصلی بالگرد بدون دریافت نیرویی از موتور بچرخد. در این شرایط نیرویی که بالگرد را در آسمان نگهداشتهاست و از سقوط آن جلوگیری کرده، درواقع انرژی جنبشی ذخیره شده در پروانه اصلی است. در یک پرواز عادی با بالگرد، پروانههای بالگرد با نیرو گرفتن از موتور آن، هوا را از بالا به پایین میفشارند و نیروی برآر را تأمین میکنند. بعبارت دیگر گشتاور از موتور آغاز شده و سپس به گیربکس و پس از آن به پروانه منتقل میشود؛ ولی درصورتی که موتور از کار بیفتد، شرایط برعکس خواهد بود. در این شرایط انرژی جنبشی ذخیره شده در پروانه باید گیربکس اصلی را هم بچرخاند و از آنجایی که گیربکس بالگردها بسیار سنگین هستند، گشتاور ذخیره شده در پروانه بهسرعت هدر میرود و پروانه طی چند ثانیه از حرکت بازمیایستد که موجب سقوط آزاد بالگرد خواهد شد. به همین دلیل با بهرهگیری از یک سامانهٔ «کلاچ ساچمهای» گیربکس از پروانه جدا میشود تا پروانه برای مدت طولانی با انرژی جنبشی ذخیره شدهاش خودگردی کند و همچنین از فشار جریان هوا رو به بالا برای ادامهٔ چرخش بهره ببرد
چرخش خودکار شرایطی از پرواز هلیکوپتر است که در طی آن روتور اصلی هلیکوپتر تنها توسط نیروهای آیرودینامیکی بدون نیروی موتور به حرکت در می آید. این مانوری است که در آن موتور از سیستم روتور اصلی جدا می شود و تیغه های روتور صرفاً توسط جریان هوا به سمت بالا از طریق روتور به حرکت در می آیند. به عبارت دیگر، موتور دیگر نیروی روتور اصلی را تامین نمی کنه. یک بردار رانش روتور در هلیکوپتر برای ایجاد نیروی رانش به جلو در پرواز با قدرت استفاده میشه. بنابراین، در جایی که هیچ منبع رانش دیگری در هلیکوپتر وجود ندارد، باید در هنگام چرخش خودکار فرود آید. چرخش خودکار وسیله ای است که به وسیله آن می توان هلیکوپتر را در صورت خرابی موتور به طور ایمن فرود آورد.
چرخش خودکار به دنبال موتور یا خرابی روتور دم
شایع ترین دلیل برای چرخش خودکار، خرابی موتور (یا خرابی هر دو موتور در مورد هلیکوپتر دو موتوره) است، اما چرخش خودکار می تواند در صورت خرابی کامل روتور دم نیز انجام شود، زیرا عملاً هیچ گشتاوری تولید نمی شود. در چرخش خودکار (اگرچه در این مورد موتور[ها] باید در مراحل پایانی نزدیک شدن خاموش شوند تا از پاسخ گشتاور موتور در هنگام فرود جلوگیری شود.)
اگر موتور از کار بیفتد، واحد چرخ آزاد به طور خودکار موتور را از روتور اصلی جدا می کند و به روتور اصلی اجازه می دهد آزادانه بچرخد. اساساً هر زمانی که دور موتور (ERPM) کمتر از RPM روتور (RRPM) باشد، واحد چرخ آزاد آزاد می شود.
سازنده حداقل و حداکثر RRPM را برای هر نوع هلیکوپتر مشخص می کند. محدوده معمولی RRPM بر روی گیج RPM به صورت یک قوس سبز مشخص می شود، با محدوده های احتیاطی مجاز که با رنگ زرد یا کهربایی مشخص شده اند و با یک علامت قرمز که حداقل و حداکثر مجاز را نشان می دهد، محصور شده است.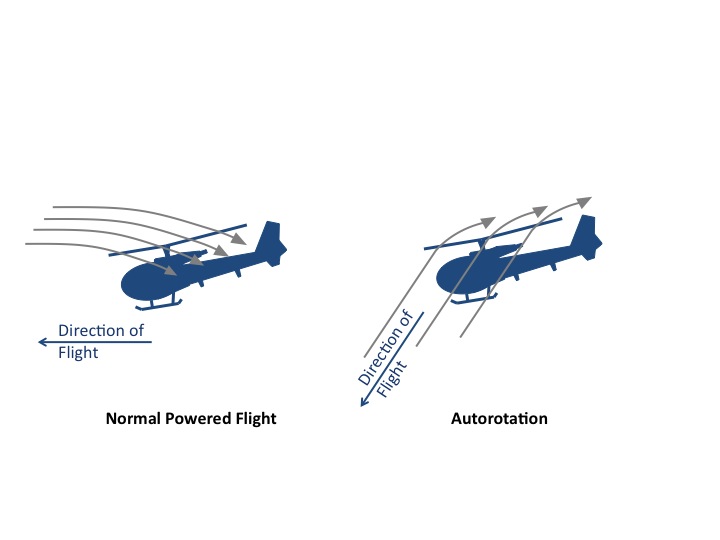
در لحظه از کار افتادن موتور، تیغههای روتور اصلی با ترکیبی از زاویه حمله و سرعت، نیروی بالابر و رانش تولید میکنند. هنگامی که قدرت موتور از کار می افتد، جزء درگ به سرعت سرعت روتور را کاهش می دهد. دفترچه راهنمای پرواز یک حداقل RRPM را تعیین می کند، که کمتر از آن، اگر سرعت روتور کاهش یابد، ممکن است بازگرداندن RRPM به یک مقدار پرواز غیرممکن باشد: روتور به طور کامل متوقف می شود و دیگر نمی چرخد. بنابراین، خلبان باید در صورت از کار افتادن قدرت موتور، فوراً گام جمعی را کاهش دهد (و در نتیجه کشش ناشی از بالابر و کشش پروفیل تیغه را کاهش دهد)، در نتیجه هلیکوپتر بلافاصله فرود را آغاز می کند، بنابراین جریان هوا به سمت بالا را از طریق هوا تولید می کند. سیستم روتور این جریان رو به بالا هوا از طریق روتور، بردارهای بالابر و کشش را در طول دهانه تیغهها تغییر میدهد تا یک بخش داخلی ایجاد کند که در آن در صفحه چرخش تیغهها عمل میکند و بنابراین آنها را در حال چرخش نگه میدارد. این نیروی رانش کافی برای حفظ RPM روتور در سرتاسر فرود فراهم میکند و در عین حال مقداری بالابر را نیز ایجاد میکند. با این وجود، نرخ فرود در چرخش خودکار معمولاً در بسیاری از هلیکوپترها 1500-2000 fpm است و ممکن است در برخی بیشتر باشد. از آنجایی که روتور دم در حین چرخش خودکار توسط گیربکس اصلی روتور هدایت می شود، تعادل مانند پرواز عادی حفظ می شود.
در طول چرخش خودکار، جریان هوا از طریق روتورها به سمت بالا، RPM را حفظ می کند
عوامل متعددی بر سرعت فرود در چرخش خودکار تأثیر میگذارند: ارتفاع چگالی، وزن ناخالص، سرعت هوا و RRPM:
در ارتفاعات با تراکم بالا، سرعت فرود بیشتر خواهد بود زیرا هوا چگالی کمتری دارد.
وزنه های ناخالص بالا هم سرعت فرود و هم RRPM را افزایش می دهد.
در IAS کمتر از حداقل نرخ پیشنهادی نزول IAS، RRPM به سمت انتهای پایین محدوده مجاز خواهد بود و در IAS بالاتر، RRPM ممکن است به سمت انتهای بالای محدوده مجاز باشد.
کنترل اولیه سرعت فرود، سرعت هوایی است. سرعت هوای بالاتر یا پایینتر با کنترل چرخهای نگرش زمین به دست میآید، درست مانند پرواز عادی.
در تئوری، خلبان یک انتخاب از سرعت های هوایی برای تغییر زاویه فرود، از یک فرود عمودی تا حداکثر برد، که حداقل زاویه فرود است، دارد. سرعت فرود در سرعت هوایی صفر زیاد است و بسته به نوع هلیکوپتر خاص و عواملی که ذکر شد، برای اکثر هلیکوپترهای سبک و متوسط به حداقل 50 تا 70 گره کاهش می یابد.
با افزایش سرعت هوا از حدی که حداقل نرخ فرود را می دهد، سرعت فرود دوباره افزایش می یابد. چنین شرایطی ممکن است باعث ایجاد برد اضافی در چرخش خودکار شود، و همانطور که RRPM با افزایش سرعت هوا افزایش مییابد، RRPM ممکن است با یک مقدار کاهشیافته (در محدودههای راهنمای پرواز) با استفاده از گام جمعی اضافی کنترل شود: این معمولاً برد را به حداکثر میرساند.
به طور مشابه، در نوبت، به دلیل افزایش بارگیری تیغه، RRPM تمایل به افزایش خواهد داشت و خلبان ممکن است نیاز به افزایش جزئی گام جمعی داشته باشد تا RRPM را در محدوده های تعیین شده سازنده نگه دارد.
هنگام فرود از یک چرخش خودکار، انرژی ذخیره شده در تیغه های دوار برای کاهش سرعت فرود و ایجاد یک فرود نرم استفاده می شود. برای متوقف کردن هلیکوپتری با سرعت نزول بالا، مقدار بیشتری انرژی روتور نسبت به توقف هلیکوپتری که آهستهتر فرود میآید مورد نیاز است. بنابراین، فرودهای خودگردان در very سرعت های کم یا خیلی زیاد بسیار مهم تر از سرعت های انجام شده در حداقل سرعت هوای فرود است.
علاوه بر این، سرعتی در چرخش خودکار وجود خواهد داشت که بالاتر از آن بخشهای عقبکشنده تیغههای روتور در امتداد دهانه تیغه گسترش مییابند تا جایی که روتور اکنون به طور قابل توجهی کاهش مییابد. این سرعت هوا معمولاً به عنوان محدودیت سرعت هوای دستی پرواز برای چرخش خودکار بیان می شود. از آنجایی که RRPM در یک چرخش خودکار با سرعت هوای صفر یا با سرعت کم در کمترین مقدار خود قرار دارد، و هیچ سرعت هوایی مؤثری برای مانور شعله ور قبل( شراره به دنبال رویکرد نهایی مرحله و مقدم بر مراحل فرود و فرود فرود است از تاچ داون وجود ندارد (در زیر بحث شده است)، ممکن است اینرسی کافی در سیستم روتور برای از بین بردن سرعت فرود قبل از آن وجود نداشته باشد. تاچ داون این امر به ویژه در هلیکوپترهایی با سیستمهای روتور اینرسی کم، مانند مدلهای R22، مدلهای روتوروی، مدلهای انستروم و برخی دیگر صادق است. ثانیاً، چرخش خودکار سرعت برد، هلیکوپتر را در پیکربندی قرار می دهد که باید به موقع اصلاح شود تا خلبان بتواند فرود خودکار (یا موتور خاموش) را انجام دهد. هلیکوپتر باید تا سرعت زمینی مناسب برای تاچ کردن و دویدن روی زمین در امتداد منطقه فرود، چه روی زیرشاخه یا چرخدار، کاهش یابد.
کاربرد عملی آموزش چرخش خودکار شبیه به «تمرین فرود اجباری بدون نیرو» است که توسط خلبانان هواپیما انجام می شود. همانطور که در مورد هواپیما، خلبان هلیکوپتر ممکن است به سادگی قدرت را برای شروع دور زدن در هر ارتفاعی دوباره اعمال کند، و (به استثنای مواردی که دریچه گاز باید توسط خلبان هماهنگ با استفاده از زمین جمعی دستکاری شود. ) در بیشتر موارد این به سادگی بالا بردن اهرم جمعی و تنظیم قدرت صعود، با تنظیم مناسب نگرش زمین است.
در طول چرخش خودکار، هلیکوپتر کاملاً قابل مانور است و ترکیبی از چرخش ها و/یا تغییرات سرعت هوا ممکن است برای تنظیم مسیر پرواز و مانور دادن هواپیما به منطقه فرود مناسب استفاده شود.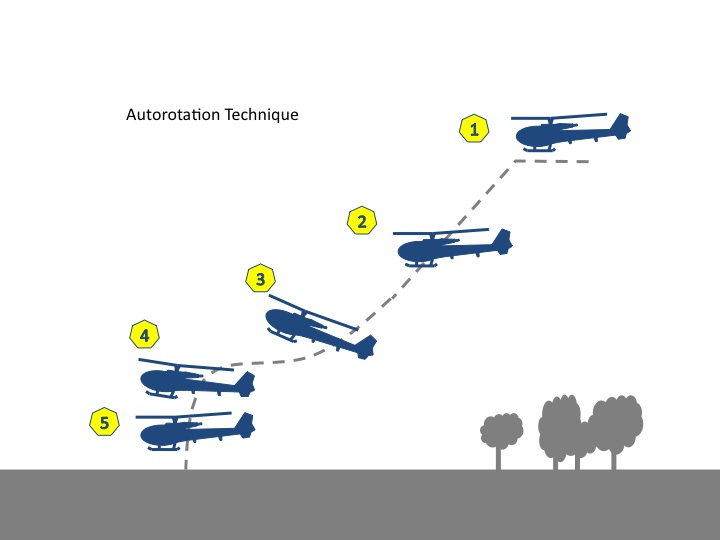
چرخش خودکار به سمت پایین یا فرود موتور خاموش (EOL) تقریباً در همه هلیکوپترهای تک موتوره به طور معمول انجام می شود و یک مانور لازم برای آزمایش مهارت است. هنگام انجام آموزش EOL، مربی یا ممتحن دریچه گاز را به تاخیر می اندازد یا سیستم کنترل موتور را مهار می کند، به طوری که وقتی اهرم جمعی بالا می رود، موتور در حالت آزاد باقی می ماند. بنابراین به این مانورها به درستی فرود خاموش موتور شبیه سازی شده (SEOL) گفته می شود، زیرا موتور در واقع خاموش نمی شود.
تکنیک فرود خودکار
در مواردی که چرخش ها به منظور بهبود منطقه فرود انتخاب شده انجام می شود، هدف همیشه باید این باشد که هلیکوپتر در یک چرخش خودکار ثابت، در محدوده IAS (که معمولاً این کار را انجام می دهد) با منطقه فرود در یک ردیف قرار گیرد. به منظور به حداکثر رساندن مزایای شعله ور شدن، که در زیر مورد بحث قرار می گیرد، چند گره بالاتر از حداقل نرخ فرود IAS باشد. در ارتفاع مناسب (معمولاً بین 40 تا 100 فوت بسته به نوع هلیکوپتر) سرعت هوا برای فرود در حال اجرا با استفاده از حالت شعله ور شدن دماغه به سرعت به سرعتی راحت کاهش می یابد. شعله ور هم در کاهش سرعت رو به جلو و هم افزایش RRPM در حین شعله ور شدن مزیت دارد، که انرژی ذخیره شده در روتور را افزایش می دهد: برای مهار تاچ داون لازم است. بالابر اضافی ایجاد شده در هنگام شعله ور شدن، سرعت فرود را کاهش می دهد. سرعت در تاچ داون و در نتیجه حرکت زمینی به سرعت و میزان شعله ور شدن بستگی دارد. هرچه درجه شعله ور شدن بیشتر باشد و مدت زمان بیشتری نگه داشته شود، سرعت تاچ داون کندتر و مسیر زمین کوتاه تر می شود. هرچه سرعت مورد نظر در هنگام تاچ داون کندتر باشد، زمان و سرعت شعله باید دقیق تر باشد، به خصوص در هلیکوپترهایی با سیستم روتور اینرسی پایین.
از آنجایی که شعله ور معمولاً RRPM را افزایش می دهد، خلبان ممکن است (به استثنای هلیکوپترهایی با سیستم روتور اینرسی پایین) اهرم جمعی را در انتهای شعله کمی بالا ببرد. (افزایش اندک در گام جمعی اغلب به عنوان "چک" شناخته می شود.) این اثر استفاده از مقداری از RRPM اضافی برای ایجاد نیروی رانش اضافی روتور است که هم سرعت فرود را کاهش می دهد و هم باعث کاهش سرعت بیشتر می شود، زیرا رانش روتور برخلاف جهت حرکت رو به جلو عمل می کند.
حالت شعله ور را نمی توان تا زمان لمس کردن نگه داشت، در غیر این صورت دم هلیکوپتر ابتدا به زمین برخورد می کند. بنابراین، هنگامی که شعله ور شدن کامل شد، خلبان باید با استفاده از چوب چرخه ای قبل از تاچ داون، وضعیت زمین سطح را دوباره انتخاب کند.
در مراحل آخر EOL، هلیکوپتر در وضعیت تراز قرار دارد، با سرعت هوایی نسبتاً کم به جلو، و تنها با اینرسی باقیمانده در روتور برای کمک به خلبان در انجام یک لمس ملایم. خلبان باید اهرم جمعی را بالا ببرد تا از بخشی یا تمام انرژی بالابر باقی مانده در سیستم روتور استفاده کند تا تاچ داون را مهار کند.
تا زمان فرود کامل و توقف هلیکوپتر، اهرم فعال نباید حرکت داده شود. با این حال، در صورت لزوم، باید از پدالهای انحراف برای اطمینان از صاف ماندن رول زمین استفاده شود.
تمرین هوا: چرخش مستقیم مستقیم به EOL
تکنیک چرخش خودکار
چرخش خودکار مستقیم به SEOL اغلب برای تمرین آخرین مراحل چرخش خودکار تاچ داون استفاده می شود. با توجه به اینکه در یک فرود اجباری عملی، هدف همیشه این است که در سطح بال ها و در IAS توصیه شده برای EOL با ارتفاع 300 فوت برج، از آن نقطه به بعد، رویه، و به ویژه مدیریت انرژی RRPM، به طور کلی یکسان است.
. از پرواز همسطح با سرعت هوای توصیه شده سازنده، در بیش از 500 فوت AGL و حرکت به سمت باد، به آرامی، اما محکم، اهرم زمین جمعی را به سمت پایین پایین بیاورید، و RRPM را در قوس سبز حفظ کنید.
حرکت جمعی را با پدال های انحرافی هماهنگ کنید تا تعادل را حفظ کنید و از چوب چرخه ای برای تنظیم نگرش زمین برای انتخاب و حفظ سرعت هوای مورد نظر استفاده کنید. در هلیکوپترهای موتور پیستونی، هنگامی که کلکتیو به طور کامل پایین آمد، دریچه گاز را کاهش دهید تا اطمینان حاصل شود که سوزن ها تمیز می شوند. پس از شکافتن سوزنها، دریچه گاز را مجدداً تنظیم کنید تا ERPM بالاتر از سرعت معمولی در حالت عادی باشد، اما آنقدر بالا نباشد که باعث اتصال مجدد سوزنها شود. سازنده اغلب ERPM را برای تنظیم توصیه می کند. تکنیک های مختلف مدیریت موتور ممکن است در کتابچه راهنمای پرواز برای هلیکوپترهای موتور توربین و سایرین با سیستم های کنترل موتور مشخص شود.
در موقعیت 2، هواپیما باید در IAS خودگردان توصیه شده، با IAS ثابت، RRPM در بخش سبز، و با هلیکوپتر در تعادل باشد.
تقریباً در ارتفاع 40 تا 100 فوتی از سطح، یا در ارتفاع توصیه شده توسط سازنده (موقعیت 3)، شعله ور شدن شروع می شود، با انتخاب یک حالت کاهش سرعت با چوب چرخه ای عقب کافی برای کاهش سرعت هوا به جلو و کاهش سرعت فرود. در اجرای فلر باید دقت شود تا چوب چرخه ای به طور ناگهانی به سمت عقب حرکت نکند که باعث بالا رفتن هلیکوپتر شود و همچنین نباید خیلی آهسته حرکت کرد، زیرا در این صورت اثر شعله ور شدن کمی برای کمک به توقف فرود وجود خواهد داشت. . شعله ور شدن ممکن است یک مانور «فقط یک بار» برای نگرش تعریف شده از نویز بالا باشد، یا به صورت تدریجی اعمال شود، اما به گونه ای که از هرگونه نگرش شدید به زمین جلوگیری شود. RRPM باید در حین شعله ور شدن افزایش یابد، و افزایش مشخص در RRPM به خلبان این امکان را می دهد که یک حرکت کوچک به سمت بالا (یا "بررسی") اهرم جمعی انجام دهد تا با هلیکوپتر در حالت شعله ور، هم افزایش و هم کاهش سرعت را به حداکثر برساند.
با کاهش فاصله از زمین بین دم هلیکوپتر و زمین، و سرعت رو به جلو به سرعت ظاهری دونده سریع کاهش می یابد، (موقعیت 4)، چرخه به جلو حرکت می کند تا هلیکوپتر برای فرود در وضعیت بدنه هم سطح قرار گیرد. ارتفاع در این زمان باید تقریباً 8 تا 15 فوت AGL باشد، بسته به ارتفاع توصیه شده توسط سازنده. برای جلوگیری از ارتفاع بیش از حد بینی و پایین بودن دم در ارتفاع زیر 10 فوت باید بسیار احتیاط کرد.
در این مرحله فقط اینرسی باقیمانده در سیستم روتور برای تامین بالابر باقی میماند و هلیکوپتر با سرعت کم به جلو فرود میآید (موقعیت 5). خلبان باید در صورت لزوم گام جمعی را افزایش دهد تا فرود را بررسی کند و فرود را مهار کند. پدال های انحرافی به دلیل کاهش RRPM و در نتیجه کاهش اثر روتور دم برای حفظ هدینگ استفاده می شود.
پس از تاچ داون، و پس از توقف کامل هلیکوپتر، اهرم جمعی به موقعیت کامل پایین می آید. هیچ تلاشی برای توقف حرکت رو به جلو روی زمین با چرخه عقب انجام نشود، زیرا تیغه های روتور اصلی می توانند در RRPM کم به بوم دم ضربه بزنند. در عوض، با کمی پایین آوردن کلکتیو در حین حرکت روی زمین، وزن بیشتری بر روی قسمت زیرین قرار می گیرد و سرعت هلیکوپتر را کاهش می دهد.
برای خلاصه کردن تکنیک EOL از یک چرخش خودکار حالت ثابت در IAS توصیه شده: FLARE (یا F-L-A R-E)، CHECK (به جز سیستم های روتور اینرسی کم) LEVEL، و CUSHION.
خطاهای رایج در چرخش خودکار
عدم استفاده از پدال ضد گشتاور کافی هنگام کاهش قدرت.
پایین آوردن ناگهانی بینی در صورت قطع برق. تخلیه سیستم روتور باعث از دست دادن بیشتر RRPM می شود و نگرش شتابی ممکن است منجر به افزایش بیش از حد در IAS و افزایش نرخ نزول شود.
عدم حفظ RRPM در محدودههای راهنمای پرواز در طول فرود.
عدم رعایت IAS توصیه شده که در آن شعله ور شدن موثر است
شعله ور شدن در ارتفاع اشتباه.
شعله ور شدن بیش از حد تهاجمی یا نه به اندازه کافی تهاجمی.
خاتمه شعله ور شدن خیلی زیاد و/یا…..
.... استفاده از اهرم جمعی بالا در ارتفاع بیش از حد، که منجر به فرود سخت، از دست دادن کنترل حرکت، و آسیب احتمالی به روتور دم و به توقف تیغه روتور اصلی می شود.
عدم تراز کردن هلیکوپتر قبلا
چرخش خودکار شرایطی از پرواز هلیکوپتر است که در طی آن روتور اصلی هلیکوپتر تنها توسط نیروهای آیرودینامیکی بدون نیروی موتور به حرکت در می آید. این مانوری است که در آن موتور از سیستم روتور اصلی جدا می شود و تیغه های روتور صرفاً توسط جریان هوا به سمت بالا از طریق روتور به حرکت در می آیند. به عبارت دیگر، موتور دیگر نیروی روتور اصلی را تامین نمی کنه. یک بردار رانش روتور در هلیکوپتر برای ایجاد نیروی رانش به جلو در پرواز با قدرت استفاده میشه. بنابراین، در جایی که هیچ منبع رانش دیگری در هلیکوپتر وجود ندارد، باید در هنگام چرخش خودکار فرود آید. چرخش خودکار وسیله ای است که به وسیله آن می توان هلیکوپتر را در صورت خرابی موتور به طور ایمن فرود آورد.
چرخش خودکار به دنبال موتور یا خرابی روتور دم
شایع ترین دلیل برای چرخش خودکار، خرابی موتور (یا خرابی هر دو موتور در مورد هلیکوپتر دو موتوره) است، اما چرخش خودکار می تواند در صورت خرابی کامل روتور دم نیز انجام شود، زیرا عملاً هیچ گشتاوری تولید نمی شود. در چرخش خودکار (اگرچه در این مورد موتور[ها] باید در مراحل پایانی نزدیک شدن خاموش شوند تا از پاسخ گشتاور موتور در هنگام فرود جلوگیری شود.)
اگر موتور از کار بیفتد، واحد چرخ آزاد به طور خودکار موتور را از روتور اصلی جدا می کند و به روتور اصلی اجازه می دهد آزادانه بچرخد. اساساً هر زمانی که دور موتور (ERPM) کمتر از RPM روتور (RRPM) باشد، واحد چرخ آزاد آزاد می شود.
سازنده حداقل و حداکثر RRPM را برای هر نوع هلیکوپتر مشخص می کند. محدوده معمولی RRPM بر روی گیج RPM به صورت یک قوس سبز مشخص می شود، با محدوده های احتیاطی مجاز که با رنگ زرد یا کهربایی مشخص شده اند و با یک علامت قرمز که حداقل و حداکثر مجاز را نشان می دهد، محصور شده است.
در لحظه از کار افتادن موتور، تیغههای روتور اصلی با ترکیبی از زاویه حمله و سرعت، نیروی بالابر و رانش تولید میکنند. هنگامی که قدرت موتور از کار می افتد، جزء درگ به سرعت سرعت روتور را کاهش می دهد. دفترچه راهنمای پرواز یک حداقل RRPM را تعیین می کند، که کمتر از آن، اگر سرعت روتور کاهش یابد، ممکن است بازگرداندن RRPM به یک مقدار پرواز غیرممکن باشد: روتور به طور کامل متوقف می شود و دیگر نمی چرخد. بنابراین، خلبان باید در صورت از کار افتادن قدرت موتور، فوراً گام جمعی را کاهش دهد (و در نتیجه کشش ناشی از بالابر و کشش پروفیل تیغه را کاهش دهد)، در نتیجه هلیکوپتر بلافاصله فرود را آغاز می کند، بنابراین جریان هوا به سمت بالا را از طریق هوا تولید می کند. سیستم روتور این جریان رو به بالا هوا از طریق روتور، بردارهای بالابر و کشش را در طول دهانه تیغهها تغییر میدهد تا یک بخش داخلی ایجاد کند که در آن در صفحه چرخش تیغهها عمل میکند و بنابراین آنها را در حال چرخش نگه میدارد. این نیروی رانش کافی برای حفظ RPM روتور در سرتاسر فرود فراهم میکند و در عین حال مقداری بالابر را نیز ایجاد میکند. با این وجود، نرخ فرود در چرخش خودکار معمولاً در بسیاری از هلیکوپترها 1500-2000 fpm است و ممکن است در برخی بیشتر باشد. از آنجایی که روتور دم در حین چرخش خودکار توسط گیربکس اصلی روتور هدایت می شود، تعادل مانند پرواز عادی حفظ می شود.
در طول چرخش خودکار، جریان هوا از طریق روتورها به سمت بالا، RPM را حفظ می کند
عوامل متعددی بر سرعت فرود در چرخش خودکار تأثیر میگذارند: ارتفاع چگالی، وزن ناخالص، سرعت هوا و RRPM:
در ارتفاعات با تراکم بالا، سرعت فرود بیشتر خواهد بود زیرا هوا چگالی کمتری دارد.
وزنه های ناخالص بالا هم سرعت فرود و هم RRPM را افزایش می دهد.
در IAS کمتر از حداقل نرخ پیشنهادی نزول IAS، RRPM به سمت انتهای پایین محدوده مجاز خواهد بود و در IAS بالاتر، RRPM ممکن است به سمت انتهای بالای محدوده مجاز باشد.
کنترل اولیه سرعت فرود، سرعت هوایی است. سرعت هوای بالاتر یا پایینتر با کنترل چرخهای نگرش زمین به دست میآید، درست مانند پرواز عادی.
در تئوری، خلبان یک انتخاب از سرعت های هوایی برای تغییر زاویه فرود، از یک فرود عمودی تا حداکثر برد، که حداقل زاویه فرود است، دارد. سرعت فرود در سرعت هوایی صفر زیاد است و بسته به نوع هلیکوپتر خاص و عواملی که ذکر شد، برای اکثر هلیکوپترهای سبک و متوسط به حداقل 50 تا 70 گره کاهش می یابد.
با افزایش سرعت هوا از حدی که حداقل نرخ فرود را می دهد، سرعت فرود دوباره افزایش می یابد. چنین شرایطی ممکن است باعث ایجاد برد اضافی در چرخش خودکار شود، و همانطور که RRPM با افزایش سرعت هوا افزایش مییابد، RRPM ممکن است با یک مقدار کاهشیافته (در محدودههای راهنمای پرواز) با استفاده از گام جمعی اضافی کنترل شود: این معمولاً برد را به حداکثر میرساند.
به طور مشابه، در نوبت، به دلیل افزایش بارگیری تیغه، RRPM تمایل به افزایش خواهد داشت و خلبان ممکن است نیاز به افزایش جزئی گام جمعی داشته باشد تا RRPM را در محدوده های تعیین شده سازنده نگه دارد.
هنگام فرود از یک چرخش خودکار، انرژی ذخیره شده در تیغه های دوار برای کاهش سرعت فرود و ایجاد یک فرود نرم استفاده می شود. برای متوقف کردن هلیکوپتری با سرعت نزول بالا، مقدار بیشتری انرژی روتور نسبت به توقف هلیکوپتری که آهستهتر فرود میآید مورد نیاز است. بنابراین، فرودهای خودگردان در very سرعت های کم یا خیلی زیاد بسیار مهم تر از سرعت های انجام شده در حداقل سرعت هوای فرود است.
علاوه بر این، سرعتی در چرخش خودکار وجود خواهد داشت که بالاتر از آن بخشهای عقبکشنده تیغههای روتور در امتداد دهانه تیغه گسترش مییابند تا جایی که روتور اکنون به طور قابل توجهی کاهش مییابد. این سرعت هوا معمولاً به عنوان محدودیت سرعت هوای دستی پرواز برای چرخش خودکار بیان می شود. از آنجایی که RRPM در یک چرخش خودکار با سرعت هوای صفر یا با سرعت کم در کمترین مقدار خود قرار دارد، و هیچ سرعت هوایی مؤثری برای مانور شعله ور قبل( شراره به دنبال رویکرد نهایی مرحله و مقدم بر مراحل فرود و فرود فرود است از تاچ داون وجود ندارد (در زیر بحث شده است)، ممکن است اینرسی کافی در سیستم روتور برای از بین بردن سرعت فرود قبل از آن وجود نداشته باشد. تاچ داون این امر به ویژه در هلیکوپترهایی با سیستمهای روتور اینرسی کم، مانند مدلهای R22، مدلهای روتوروی، مدلهای انستروم و برخی دیگر صادق است. ثانیاً، چرخش خودکار سرعت برد، هلیکوپتر را در پیکربندی قرار می دهد که باید به موقع اصلاح شود تا خلبان بتواند فرود خودکار (یا موتور خاموش) را انجام دهد. هلیکوپتر باید تا سرعت زمینی مناسب برای تاچ کردن و دویدن روی زمین در امتداد منطقه فرود، چه روی زیرشاخه یا چرخدار، کاهش یابد.
کاربرد عملی آموزش چرخش خودکار شبیه به «تمرین فرود اجباری بدون نیرو» است که توسط خلبانان هواپیما انجام می شود. همانطور که در مورد هواپیما، خلبان هلیکوپتر ممکن است به سادگی قدرت را برای شروع دور زدن در هر ارتفاعی دوباره اعمال کند، و (به استثنای مواردی که دریچه گاز باید توسط خلبان هماهنگ با استفاده از زمین جمعی دستکاری شود. ) در بیشتر موارد این به سادگی بالا بردن اهرم جمعی و تنظیم قدرت صعود، با تنظیم مناسب نگرش زمین است.
در طول چرخش خودکار، هلیکوپتر کاملاً قابل مانور است و ترکیبی از چرخش ها و/یا تغییرات سرعت هوا ممکن است برای تنظیم مسیر پرواز و مانور دادن هواپیما به منطقه فرود مناسب استفاده شود.
چرخش خودکار به سمت پایین یا فرود موتور خاموش (EOL) تقریباً در همه هلیکوپترهای تک موتوره به طور معمول انجام می شود و یک مانور لازم برای آزمایش مهارت است. هنگام انجام آموزش EOL، مربی یا ممتحن دریچه گاز را به تاخیر می اندازد یا سیستم کنترل موتور را مهار می کند، به طوری که وقتی اهرم جمعی بالا می رود، موتور در حالت آزاد باقی می ماند. بنابراین به این مانورها به درستی فرود خاموش موتور شبیه سازی شده (SEOL) گفته می شود، زیرا موتور در واقع خاموش نمی شود.
تکنیک فرود خودکار
در مواردی که چرخش ها به منظور بهبود منطقه فرود انتخاب شده انجام می شود، هدف همیشه باید این باشد که هلیکوپتر در یک چرخش خودکار ثابت، در محدوده IAS (که معمولاً این کار را انجام می دهد) با منطقه فرود در یک ردیف قرار گیرد. به منظور به حداکثر رساندن مزایای شعله ور شدن، که در زیر مورد بحث قرار می گیرد، چند گره بالاتر از حداقل نرخ فرود IAS باشد. در ارتفاع مناسب (معمولاً بین 40 تا 100 فوت بسته به نوع هلیکوپتر) سرعت هوا برای فرود در حال اجرا با استفاده از حالت شعله ور شدن دماغه به سرعت به سرعتی راحت کاهش می یابد. شعله ور هم در کاهش سرعت رو به جلو و هم افزایش RRPM در حین شعله ور شدن مزیت دارد، که انرژی ذخیره شده در روتور را افزایش می دهد: برای مهار تاچ داون لازم است. بالابر اضافی ایجاد شده در هنگام شعله ور شدن، سرعت فرود را کاهش می دهد. سرعت در تاچ داون و در نتیجه حرکت زمینی به سرعت و میزان شعله ور شدن بستگی دارد. هرچه درجه شعله ور شدن بیشتر باشد و مدت زمان بیشتری نگه داشته شود، سرعت تاچ داون کندتر و مسیر زمین کوتاه تر می شود. هرچه سرعت مورد نظر در هنگام تاچ داون کندتر باشد، زمان و سرعت شعله باید دقیق تر باشد، به خصوص در هلیکوپترهایی با سیستم روتور اینرسی پایین.
از آنجایی که شعله ور معمولاً RRPM را افزایش می دهد، خلبان ممکن است (به استثنای هلیکوپترهایی با سیستم روتور اینرسی پایین) اهرم جمعی را در انتهای شعله کمی بالا ببرد. (افزایش اندک در گام جمعی اغلب به عنوان "چک" شناخته می شود.) این اثر استفاده از مقداری از RRPM اضافی برای ایجاد نیروی رانش اضافی روتور است که هم سرعت فرود را کاهش می دهد و هم باعث کاهش سرعت بیشتر می شود، زیرا رانش روتور برخلاف جهت حرکت رو به جلو عمل می کند.
حالت شعله ور را نمی توان تا زمان لمس کردن نگه داشت، در غیر این صورت دم هلیکوپتر ابتدا به زمین برخورد می کند. بنابراین، هنگامی که شعله ور شدن کامل شد، خلبان باید با استفاده از چوب چرخه ای قبل از تاچ داون، وضعیت زمین سطح را دوباره انتخاب کند.
در مراحل آخر EOL، هلیکوپتر در وضعیت تراز قرار دارد، با سرعت هوایی نسبتاً کم به جلو، و تنها با اینرسی باقیمانده در روتور برای کمک به خلبان در انجام یک لمس ملایم. خلبان باید اهرم جمعی را بالا ببرد تا از بخشی یا تمام انرژی بالابر باقی مانده در سیستم روتور استفاده کند تا تاچ داون را مهار کند.
تا زمان فرود کامل و توقف هلیکوپتر، اهرم فعال نباید حرکت داده شود. با این حال، در صورت لزوم، باید از پدالهای انحراف برای اطمینان از صاف ماندن رول زمین استفاده شود.
تمرین هوا: چرخش مستقیم مستقیم به EOL
تکنیک چرخش خودکار
چرخش خودکار مستقیم به SEOL اغلب برای تمرین آخرین مراحل چرخش خودکار تاچ داون استفاده می شود. با توجه به اینکه در یک فرود اجباری عملی، هدف همیشه این است که در سطح بال ها و در IAS توصیه شده برای EOL با ارتفاع 300 فوت برج، از آن نقطه به بعد، رویه، و به ویژه مدیریت انرژی RRPM، به طور کلی یکسان است.
. از پرواز همسطح با سرعت هوای توصیه شده سازنده، در بیش از 500 فوت AGL و حرکت به سمت باد، به آرامی، اما محکم، اهرم زمین جمعی را به سمت پایین پایین بیاورید، و RRPM را در قوس سبز حفظ کنید.
حرکت جمعی را با پدال های انحرافی هماهنگ کنید تا تعادل را حفظ کنید و از چوب چرخه ای برای تنظیم نگرش زمین برای انتخاب و حفظ سرعت هوای مورد نظر استفاده کنید. در هلیکوپترهای موتور پیستونی، هنگامی که کلکتیو به طور کامل پایین آمد، دریچه گاز را کاهش دهید تا اطمینان حاصل شود که سوزن ها تمیز می شوند. پس از شکافتن سوزنها، دریچه گاز را مجدداً تنظیم کنید تا ERPM بالاتر از سرعت معمولی در حالت عادی باشد، اما آنقدر بالا نباشد که باعث اتصال مجدد سوزنها شود. سازنده اغلب ERPM را برای تنظیم توصیه می کند. تکنیک های مختلف مدیریت موتور ممکن است در کتابچه راهنمای پرواز برای هلیکوپترهای موتور توربین و سایرین با سیستم های کنترل موتور مشخص شود.
در موقعیت 2، هواپیما باید در IAS خودگردان توصیه شده، با IAS ثابت، RRPM در بخش سبز، و با هلیکوپتر در تعادل باشد.
تقریباً در ارتفاع 40 تا 100 فوتی از سطح، یا در ارتفاع توصیه شده توسط سازنده (موقعیت 3)، شعله ور شدن شروع می شود، با انتخاب یک حالت کاهش سرعت با چوب چرخه ای عقب کافی برای کاهش سرعت هوا به جلو و کاهش سرعت فرود. در اجرای فلر باید دقت شود تا چوب چرخه ای به طور ناگهانی به سمت عقب حرکت نکند که باعث بالا رفتن هلیکوپتر شود و همچنین نباید خیلی آهسته حرکت کرد، زیرا در این صورت اثر شعله ور شدن کمی برای کمک به توقف فرود وجود خواهد داشت. . شعله ور شدن ممکن است یک مانور «فقط یک بار» برای نگرش تعریف شده از نویز بالا باشد، یا به صورت تدریجی اعمال شود، اما به گونه ای که از هرگونه نگرش شدید به زمین جلوگیری شود. RRPM باید در حین شعله ور شدن افزایش یابد، و افزایش مشخص در RRPM به خلبان این امکان را می دهد که یک حرکت کوچک به سمت بالا (یا "بررسی") اهرم جمعی انجام دهد تا با هلیکوپتر در حالت شعله ور، هم افزایش و هم کاهش سرعت را به حداکثر برساند.
با کاهش فاصله از زمین بین دم هلیکوپتر و زمین، و سرعت رو به جلو به سرعت ظاهری دونده سریع کاهش می یابد، (موقعیت 4)، چرخه به جلو حرکت می کند تا هلیکوپتر برای فرود در وضعیت بدنه هم سطح قرار گیرد. ارتفاع در این زمان باید تقریباً 8 تا 15 فوت AGL باشد، بسته به ارتفاع توصیه شده توسط سازنده. برای جلوگیری از ارتفاع بیش از حد بینی و پایین بودن دم در ارتفاع زیر 10 فوت باید بسیار احتیاط کرد.
در این مرحله فقط اینرسی باقیمانده در سیستم روتور برای تامین بالابر باقی میماند و هلیکوپتر با سرعت کم به جلو فرود میآید (موقعیت 5). خلبان باید در صورت لزوم گام جمعی را افزایش دهد تا فرود را بررسی کند و فرود را مهار کند. پدال های انحرافی به دلیل کاهش RRPM و در نتیجه کاهش اثر روتور دم برای حفظ هدینگ استفاده می شود.
پس از تاچ داون، و پس از توقف کامل هلیکوپتر، اهرم جمعی به موقعیت کامل پایین می آید. هیچ تلاشی برای توقف حرکت رو به جلو روی زمین با چرخه عقب انجام نشود، زیرا تیغه های روتور اصلی می توانند در RRPM کم به بوم دم ضربه بزنند. در عوض، با کمی پایین آوردن کلکتیو در حین حرکت روی زمین، وزن بیشتری بر روی قسمت زیرین قرار می گیرد و سرعت هلیکوپتر را کاهش می دهد.
برای خلاصه کردن تکنیک EOL از یک چرخش خودکار حالت ثابت در IAS توصیه شده: FLARE (یا F-L-A R-E)، CHECK (به جز سیستم های روتور اینرسی کم) LEVEL، و CUSHION.
خطاهای رایج در چرخش خودکار
عدم استفاده از پدال ضد گشتاور کافی هنگام کاهش قدرت.
پایین آوردن ناگهانی بینی در صورت قطع برق. تخلیه سیستم روتور باعث از دست دادن بیشتر RRPM می شود و نگرش شتابی ممکن است منجر به افزایش بیش از حد در IAS و افزایش نرخ نزول شود.
عدم حفظ RRPM در محدودههای راهنمای پرواز در طول فرود.
عدم رعایت IAS توصیه شده که در آن شعله ور شدن موثر است
شعله ور شدن در ارتفاع اشتباه.
شعله ور شدن بیش از حد تهاجمی یا نه به اندازه کافی تهاجمی.
خاتمه شعله ور شدن خیلی زیاد و/یا…..
.... استفاده از اهرم جمعی بالا در ارتفاع بیش از حد، که منجر به فرود سخت، از دست دادن کنترل حرکت، و آسیب احتمالی به روتور دم و به توقف تیغه روتور اصلی می شود.
عدم تراز کردن هلیکوپتر قبلا