
مشکل حمل استراکچرهای موشک به لانچ پد بگوییم طراحی تقویت کننده معمولا با بارگیری گیج کنترل میشه که تعداد اتصالات بخش را ضروری میکنه، حمل و نقل از کارخانه به مونتاژ یک مسئله اصلی است/. بخشهای SRB عمدتاً توسط واگن ریلی حمل میشوند و بنابراین باید در پوشش ابعاد استاندارد خطوط راهآهن باری ایالات متحده قرار گیرند تا اطمینان حاصل شود که از طریق هر تونل، پل و یا چندین منطقه مسیر موازی بین نقاط حمل و نقل و دریافت جابشن در حمل جاده ای هم معمولا با بارکشهای سنگین اما باز باید گیج پلها و جاده ها در نظر گرفته شود در اخرهم از کیسهای قطعهبندی شده در طراحی استفاده میشه .این ادعا که قطر تقویت کننده های موشکها توسط گیج راه آهن ساخته میشه چقدر درسته ؟آیا بوسترها دقیقاً چنین قطری داشتند زیرا هر چه بزرگتر باشد بهتر است با این حال، قطر بوسترهای حدود (12 فوت) از عرض بارگیری هم عموماً 10 فوت و 8 اینچ است) بیشتره . محمولههایی که از عرض بارگذاری استاندارد فراتر میروند خیلی غیرمعمول نیستند خوب معمولا گیج اندازه رو تحت تأثیر قرار داده است. معمولا در نزدیک لانچ پد ها از گیج های متفاوتی استفاده میشه اما مثالا بوستر تقویت تو یک ایالت ساخته میشه و تا مرکز پرتاب کندی فاصله داره و باید از همان ساختار گیج استاندارد استفاده کنه خوب مجبورند اندازها در حد امکان با استاندارد یکی باشه این بدان معناست که SRBها نهایتاً از نظر قطر محدود هستند که البته در یک موشک جامد هسته سوز مدت زمان سوختن (کمتر یا بیشتر) را تعیین می کنه
لذا طرح دوگانه مثل از طراحی تقویتکننده تقسیمبندی شده برای Ariane 5 نیز استفاده میکنه. سوخت بخش بالا در ایتالیا و دو بخش پایین تر در فرودگاه فضایی کورو سوخت می شوند. آنها با ساختاری شبیه به شاتل SRB به یکدیگر متصل می شوند
هوافضا
-
rohamavation

نام: roham hesami radرهام حسامی راد
محل اقامت: 100 مایلی شمال لندن جاده آیلستون، لستر، لسترشر. LE2
عضویت : سهشنبه ۱۳۹۹/۸/۲۰ - ۰۸:۳۴
پست: 3286-
سپاس: 5494
- جنسیت:
تماس:
-
rohamavation
نام: roham hesami radرهام حسامی راد
محل اقامت: 100 مایلی شمال لندن جاده آیلستون، لستر، لسترشر. LE2
عضویت : سهشنبه ۱۳۹۹/۸/۲۰ - ۰۸:۳۴
پست: 3286-
سپاس: 5494
- جنسیت:
تماس:
Re: هوافضا
آيا تا به حال به اين فكر كردین كه هواپيماهايي با وزن چند تُن چگونه به راحتي در باند فرودگاه ها لندینگ یا تیک اف میکنند وسيله اي كه هواپيما ها به واسطه ي آن ، امر مهم فرود را انجام ميدهند Landing Gear هست
ارابه فرود سازه اي است كه هواپيما در هنگام توقف يا حركت روي زمين بر آن تكيه دارد اين وسيله داراي دو وظيفه اصلي است ببینید
١- تحمل وزن هواپيما روي زمين
٢- جذب نيرو هاي وارده به هواپيما در حين تماس با زمين
در طراحي هاي جديد با توجه به وزن و اندازه هواپيما تعداد متعددي ارابه فرود اصلي وجود دارد.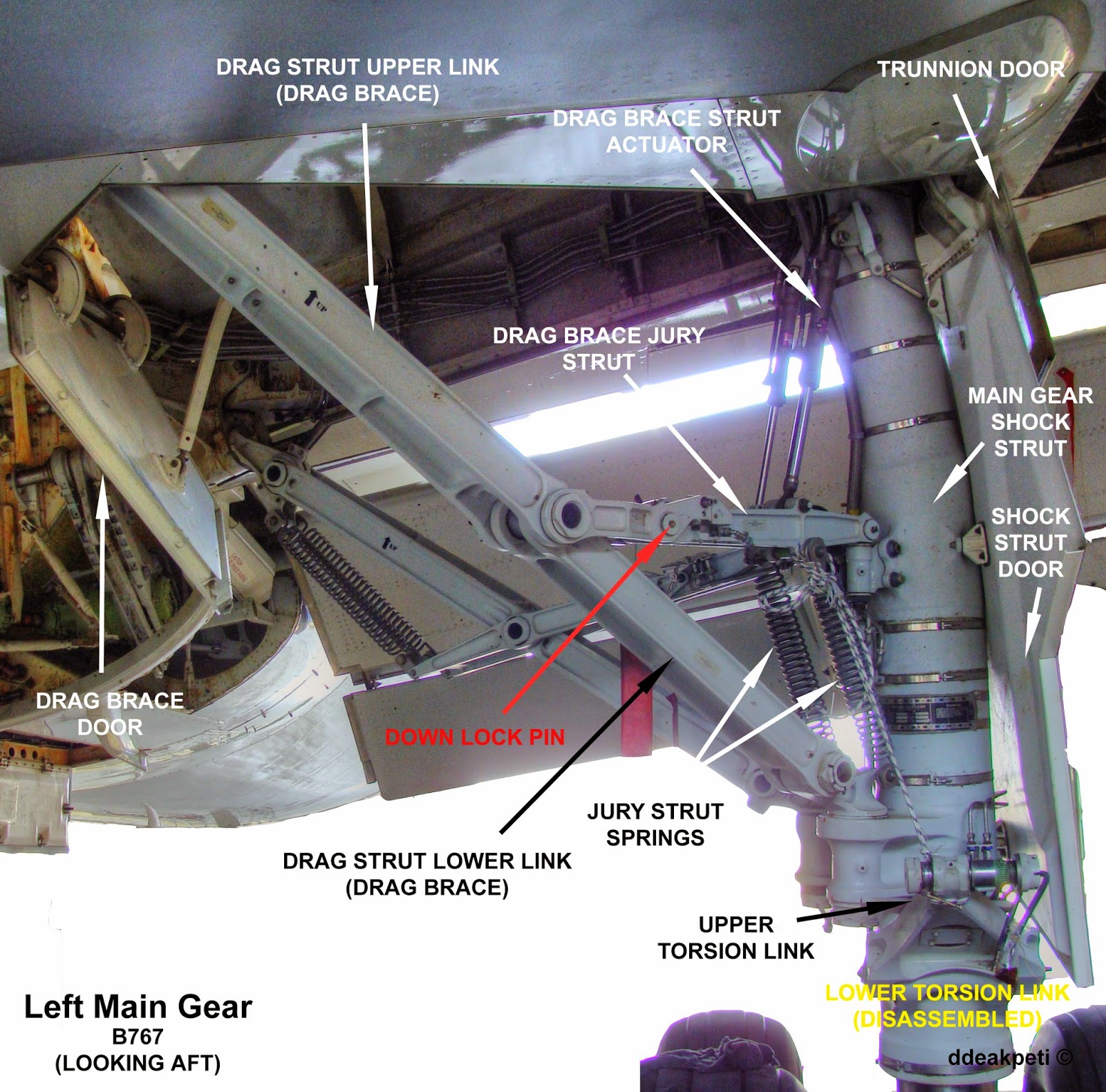
به طوري كه بين بدنه و لاستيك هر ارابه فرود يك سيلندر و پيستون وجود دارد كه در داخل آن روغن هيدروليك و نيتروژن وجود دارد, نيتروژن ضربه هاي هنگام خزش و روغن ضربه هاي هنگام فرود را خنثي ميكند.
انواع Landing Gear
برخي از انواع لندينگ گير عبارت اند از :
١- لندينگ گير ثابت فنري
٢- لندينگ گير ثابت تلسكوپي
٣- لندينگ گير ثابت اهرمي
٤- لندينگ گير جمع شونده تلسكوپي
٥- لندينگ گير جمع شونده اهرمي
طراحي لندگينگ گير
معيار هايي كه در بخش طراحي لندينگ گير مطرح هستند عبارت اند از ١- ضريب پسا ٢- وزن فرود ٣- پايداري زميني هواگرد ٤- قابليت هدايت زميني ٥- واكنش در مقابل نوسانات زميني
لندينگ گير در هواپيما هاي سبك
ارابه فرود در هواپيما هاي سبك معمولا به دو صورت ميباشد در حالت اول دو چرخ بر روي يك مهور به عنوان ارابه فرود اصلي در جلوي بدنه و يك چرخه دُم هم در عقب قرار دارد• در حالت دوم دو چرخ بر روي يك محور در وسط بدنه و يك چرخ هم در زير دماغه هواپيما قرار ميگرد.
به چرخ زير دماغهnose wheel يا tree cycle ميگويند و چرخ زير دُم هواپيما tail wheel گويند .
ارابه فرود هواپيما از نظر هدايت پذيري
-steerable:به هواپيمايي با چرخ دماغه مه قابليت هدايت دارد.
-castering:نوعي از طراحي چرخ دماغه هواپيما كه قابليت هدايت پذيري ندارد
-differential braking:به قابليت استفاده جداگانه از ترمز ها گفته ميشود.ترمز هاي هواپيما بر روي چرخ هاي اصلي قرار دارند و وجود differential braking براي چرخ هاي castering الزامي است، زيرا بدون وجود اين قابليت هواپيما توان چرخش بر روي زمين را ندارد اما در هواپيما هاي steerable قابليت فرمان پذيري بر روي زمين افزايش ميابد
: oleo strutاين سيستم داراي سيلندر، پيستون درون آن، محفظه روغن و هوا است كه ضربات ناشي از فرود را جذب كرده و رها ميسازد. داخل اين سيلندر و پيستون ها علاوه بر هوا روغن هيدروليك و نيتروژن وجود دارد، نيتروژن ضربه هاي هنگام خزش و روغن هيدروليك ضربه هاي هنگام فرود را خنثي ميكند.
بطور کلی ارابه فرود دارای شش نوع یا حالت اصلی است .
یک چرخ اصلی و سه چرخ کوچک (Single main )
چرخ دمی (Tail gear )
4 چرخه (quadricycle )
دو چرخ اصلی و دو چرخ کوچک (Bicycle )
سه چرخه (یا چرخ دماغه ای ) (Tricycle یا Nose gear )
چند چرخه (Multi bogey )
بدون ارابه
مشخصات انواع ارابه فرود
به طور خلاصه مشخصات انواع ارابه فرود به شرح زیر است :
الف) یک چرخ اصلی و سه چرخ کوچک
از این نوع ارابه فرود در بسیاری از هواسرها به دلیل سادگی زیاد استفاده می شود .چرخ اصلی هم می تواند جلوتر از مرکز ثقل و یا در عقب آن باشد که در این صورت باید زیر بدنه و جلوی مرکز ثقل یک سکان (Skid) قرار داد .
ب ) دو چرخه (Bicycle )
این نوع ارابه فرود دارای دو چرخ اصلی است یکی جلو ودیگری در عقب مرکز ثقل ، به اضافه دو چرخ کوچک دیگر در زیر بالها برای حفظ پایداری هواپیما در روی زمین قرار داده می شود. چرخ عقب این نوع ارابه فرود آنقدر عقب تر از مرکز ثقل است که هواپیما باید بطور افقی فرود آمده و بلند شود. در این صورت هواپیما باید طوری طراحی شده باشد که با زاویه حمله کم بال، بتواند ضریب برآی زیادی تولید کند (یعنی باید دارای A.R، مقطع ایرفول کلفت و فلپ قوی باشد) این نوع فقط در هواپیماهایی استفاده می شود که دارای بدنه لاغر و دراز و بالهای پهنی می باشند . هواپیمای B47 دارای چنین ارابه فرودی است .
ج ) ارابه فرود چرخ دمی (Tail gear )
این نوع ارابه فرود دارای 2 چرخ اصلی در جلوی مرکز ثقل و یک چرخ کمکی در زیر دم است. از آنجا که چرخ عقب بسیار کوچکتر از چرخهای جلو است، گاهی به جای آن یک تیغه Skid قرار می دهند، در این صورت به آن Tail Dragger گویند. این نوع ارابه فرود قبلا به عنوان ارابه فرود معمولی Conventioanal نامیده میشد چرا که در 40 سال اول هوانوردی بطور وسیع استفاده می شد. این ارابه فرود دارای وزن و پسای کمتر بوده و به ملخ فاصله بیشتری از زمین می دهد. همچنین در زمینهای ناهموار، باعث می شود بال، برای بیشتری در مقایسه با نوع سه چرخه بدهد. با این وجود، این نوع ارابه فرود، ذاتا ناپایدار است. اگر هواپیما شروع به دور زدن در روی زمین بکند، بدلیل اینکه مرکز ثقل عقب تر از چرخهای اصلی است، دور زدن مداوم در حال سخت تر شدن است. و وقتی هواپیما می خواهد خود را صاف کند، یا نوک یکی از بالها به زمین می خورد و یا ارابه فرود می شکند و یا هواپیما از باند خارج می شود. یکی از اشکالات این نوع ارابه فرود این است که هواپیما وقتی روی زمین است افقی نیست و دماغه مقداری بالاتر از دم قرار دارد. لذا خلبان و مسافرین در هنگام سوار شدن قدری مشکل دارند. اشکال دیگر این نوع ارابه فرود عدم وجود بینایی کافی در هنگام حرکت روی باند فرودگاه است.
د) سه چرخ یا چرخ دماغه ای Tricycleو یا Nose Gear
عمومی ترین و شایع ترین نوع ارابه فرود، نوع سه چرخه است که دارای دو چرخ اصلی در عقب مرکز ثقل و یک چرخ کمکی در جلوی مرکز ثقل است. بر خلاف چرخ دمی، هر سه چرخ این نوع ارابه فرود هم اندازه اند و بنابر این هواپیما روی باند کاملا افقی قرار دارد. بدلیل اینکه مرکز ثقل در جلوی چرخهای اصلی قرار دارد، هواپیما در روی زمین پایدار است و نیز هنگام فرود می تواند بصورت کج بنشیند.
ه) چهار چرخه Quadricycle
ارابه فرود چهار چرخه مانند ارابه فرود دو چرخه است جز اینکه چرخها در کناره های بدنه قرار دارند. با این ارابه فرود نیز هواپیما مجبور است بطور افقی بنشیند و بلند شود. . چرا که دارای مزیت داشتن کف اتاق نزدیک به زمین هستند که بسیار مناسب بارگیری است. بطور کلی هرچه وزن هواپیما افزایش یابد، تعداد چرخها نیز افزایش می یابد و لذا تمامی پنج حالت فوق می تواند دارای 4-2 یا تعداد بیشتری چرخ بجای چرخهای اصلی باشند. هرچه وزن افزایش یابد ابعاد چرخها افزایش می یابد و لذا با استفاده از چرخهای بیشتر، ابعاد چرخها کاهش یافته و بار بین چرخها تقسیم می شود.
و) چند چرخه Multi Bogey
جهت رعایت مسائل ایمنی، و نیز کاهش ابعاد هر چرخ استفاده از نوع چند چرخی با داشتن 4 چرخ یا بیشتر بسیار بهتر است. وقتی نوع چند چرخه استفاده می شود، آنها به سازه ای بنام Bogey وصل می شوند که آنها نیز به انتهای پایه جذب کننده ضربه گیر وصل می شوند.
بطور کلی وقتی جرم هواپیما زیر lb 50.000باشد، برای هر پایه یک چرخ استفاده می شود، هر چند جهت رعایت مسائل ایمنی ( پنجری) استفاده از دو چرخ برای هر پایه بهتر است. در صورتی که وزن هواپیما بین 50.000lb و 150.000lb باشد معمول است برای هر پایه دو چرخ قرار می دهند حتی گاهی 2 چرخ برای هر پایه تا جرم 250000lb نیز استفاده می شود. هواپیماهای مسافربری پهن پیکر مانند B747,A310 دارای ارابه فرود چند چرخه اند.
ز) بدون ارابه فرود
هواپیما می تواند ارابه فرود نداشته باشد. این حالت بندرت در هواپیما یافت می گردد، زیرا در عمل با مشکلات فراوانی روبه رو می شوند.این نوع ارابه فرود بیشتر در پرند های بدون سر نشین استفاه می شوند. هواپیماهایی که قرار است روی آب فرود آمده و از روی آن برخیزند، ارابه فرود مخصوصی دارند تا وسیله سر خوردن هواپیما را روی آب فراهم آورد. به این نوع ارابه فرود وسیله سرش یا تیغه گویند.
3- ارابه فرود ثابت و یا جمع شونده
یکی از تصمیمات اولیه در طراحی ارابه فرود، این است که آیا ارابه فرود در طول پرواز ثابت باشد و یا اینکه قابلیت جمع شدن در داخل هواپیما را داشته باشد. معمولا این تصمیم پس از آنکه نوع ارابه فرود تعیین گردید گرفته می شود. بطور کلی ارابه فرود ثابت Fixed در مقایسه با ارابه فرود جمع شونده Retractable دارای مزایا و معایب زیر است:
الف- مزایا:
هزینه ساخت هواپیما کمتر است.
هواپیما سبک تر خواهد بود.
طراحی و ساخت آسانتر است.
ب- معایب:
دارای نیروی پسای بیشتری است.
کارایی هواپیما کاهش می یابد.
با توجه به ایمنی نشست و برخاست هواپیما، بهتر آن است که ارابه فرود در بال جمع گردد. در شکل زیر انواع ارابه فرود که در زیر بال، داخل بدنه، کنار بدنه، در داخل بال و بدنه، در داخل پوشش موتور نشان داده شده است.
بطور کلی دو محل اصلی جمع شدن ارابه فرود، بال و بدنه است. بطور کلی طراحی هواپیمایی که ارابه فرودش قرار است در بدنه جمع شود آسانتر از هواپیماهایی است که ارابه فرودش در بال جمع می گردد.
3-اصول کلی ساختمان انواع ارابه فرود
در این نوع ارابه فرود، بطور کلی محل مرکز ثقل باید قدری عقب تر از نقطه وسط بین دو چرخ باشد ( به عبارت دیگر فاصله بین مرکز ثقل تا چرخ جلو بایستی بیشتر از فاصله مرکز ثقل تا چرخ عقب باشد). در شکل زیر این امر نشان داده شده است.
در صورتیکه هواپیما افقی باشد، زاویه بین خط مماس مشترک چرخهای جلو وعقب و خط افق باید بین 10تا 15 درجه باشد. همچنین زاویه خطوط گذرنده از عقب ترین و جلوترین محل مرکز ثقل چرخ جلو با خط قائم باید بین 16-25 درجه عقب تر از خط عمودی چرخ جلو باشند. در صورتی که مرکز ثقل خیلی جلو باشد، احتمال کله معلق شدن هواپیما وجود دارد و در صورت خیلی عقب بودن احتمال دور زدن هواپیما دور خودش دو روی زمین در هنگام حرکت وجود دارد. برای جلوگیری از واژگون شدن هواپیما به بغل نیز باید چرخ عقب در راستای مرکز ثقل و دو چرخ جلو باید دارای زاویه بیش از 25 درجه با مرکز ثقل باشند سیستمهای تابع ارابه فرود
ضربه گیرShock Absorber
یکی از ماموریتهای ارابه فرود، جذب ضربه به هنگام نشستن بد و نیز هنگام بارگیری و حرکت در باند بوده که حرکت را نرم می کند. بخشی از این کار توسط تایرها انجام می شود. بعضی هوپیماهای دست ساز و اکثر هواسرها نیز فاقد سیستم مجزای ضربه گیر هستند. ضربه گیری آنها تنها متکی به لاستیکها است و دارای محور سخت هستند. تایرها در هنگام فرود و یا برخورد با مانع سرعت گیر قدری فشرده شده و لذا ضربه را جذب می کنند. انواع مشهور ضربه گیر عبارتند از:
- بدون ضربه گیر Rigid Axle
- فنر سخت Solid Spring
- لاستیک و لولا Rubber & Hinge
- سیستم هیدورولیکی لوله ای Oleo Pneumatic Shoch Strut
- سیستم هیدرولیکی لولاییPneumatic Hinge Oleo
1- ضربه گیر فنر سخت:
ضربه گیر فنر سخت در بسیاری از هواپیماهای عمومی هوانوردی استفاده می شود ( مخصوصا هواپیماهای سسنا) . این نوع ضربه گیر بسیار ساده است ولی از انواع دیگر سنگین تر است. فنر سخت از نوع تخت است که با خم شدن ضربه را جذب می کند. البته این باعث می شود که تایر نسبت به باند کج شود.
2- ضربه گیر اهرمی یا لاستیک و لولا:
این نوع ضربه گیر در هواپیماهای قدیمی استفاده فراوان داشت. مثلا در هواپیماهای Piper Cub پای چرخ به بدنه لولا شده و با استفاده از کابلهای لاستیکی در زیر پای چرخ ضربه توسط کشش آنها جذب می شود. این نوع ارابه فرود سبک است ولی پسای زیادی دارد.
3- ضربه گیر هیدرولیکی:
امروزه عمومی ترین نوع ضربه گیر، هیدرولیکی است. در این ضربه گیر ضربه بوسیله اثری شیبه اثر فنر خنثی می شود. برای افرایش راندمان ضربه گیر، اکثر ضربه گیرهای هیدرولیکی دارای مکانیزمی هستند که توسط آن مقدار فشار وارده بر چرخها را با استفاده از میزان ضربه تنظیم می کند.
جدول 1- راندمان انواع ضربه گیر
راندمان نوع ضربه گیر
0.5 فنر تخت فولادی
0.62 فنر مارپیچی فولادی
0.45 چرخ بدون ضربه گیر
0.6 تکه لاستیکی
0.58 سیستمهای لاستیکی
0.65-0.8 هیدرولیکی
ارابه فرود یا Landing Gearتمامی هواپیماهایی که در جهان از ابتدای اختراع تا به الان ساخته شده اند، برای فرود آمدن به ۲ نوع ارابه و یا چرخ فرود اتکا می کنند و از آن چرخ ها برای فرود خود استفاده می کنند. در این حالت یکی ارابه های اصلی که در زیر بال و یا بدنه ی اصلی قرار گرفته است و ارابه ای دیگر که در زیر دماغه ی هواپیما است، از آن برای حفظ تعادل استفاده می شود.قسمتي از هواپيما كه چرخها در آن قرار ميگيرند، محل جمع شدن ارابه فرود ميگويند و فقط به هنگام نشست و برخاست هواپيما از آنها استفاده ميشود. عمل جمع شدن و باز شدن چرخها توسط عملكنندههايي با استفاده از سيستمهاي هواپيما از قبيل هيدروليك و ....صورت ميگيرد و به هواپيما اجازه ميدهند روي زمين فرود آمده و حركت كند و در طول پرواز، هواپيما به آنها نياز ندارد. به گزارش خبرنگار سرويس : چرخها بعد از برخاستن هواپيما جمع ميشوند و اين عمل به يك دليل مهم صورت ميگيرد و آن اين است كه براي آن كه هواپيما سرعتش زياد شود، بايد كمترين مقاومت را در برابر هوا داشته باشد. يعني بايد به بيشترين حالت آيروديناميكي ممكن برسد. اگر چرخها جمع نشوند يك مقاومت جدي در برابر باد ايجاد خواهد شد و مانند ترمز باعث كاهش سرعت ميشوند. هواپيما چگونه روي باند فرود ترمز كرده و متوقف ميشود؟ هنر خلبان اين است كه هواپيما را آرام در محلي مشخص و با سرعتي خاص روي باند فرودگاه بنشاند. اگر باد جانبي خيلي قوي باشد، سكان هدايت بايد بسرعت وارد عمل شود. وقتي هواپيما با زمين تماس ميگيرد، سرعتش بيش از 200 كيلومتر در ساعت است كه اين سرعت بايد به شدت كاهش يابد، در غير اين صورت هواپيما از باند خارج ميشود. با اين كار بالهها بلند ميشوند و زمينه ترمز در هواپيما را فراهم ميكنند
هواپیما
ارابه فرود سازه ای است که هواپیما در هنگام توقف یا حرکت بر روی زمین از آن استفاده می کند. ارابه فرود معمولاً دارای چرخ است ولی در برخی هواپیماها اسکی (استفاده بر روی برف) و محفظه هوا (استفاده بر روی آب) نیز به جای چرخ به کار می رود.
در نگاه کلی ارابه فرود را به دو نوع ثابت و جمع شونده تقسیم می کنند، در ابتدا تمام هواپیماها دارای ارابه فرود ثابت بودند همانطور که از اسم این نوع ارابه فرود معلوم است این ارابه فرودها روی بدنه هواپیما ثابت هستند و پس از بلند شدن هواپیما از روی زمین تغییری در مکان ارابه فرود به وجود نمی آید، با پیشرفت تکنولوژی و افزایش سرعت هواپیماها و برای کاهش درگ و به طبع کاهش مصرف سوخت و در نتیجه افزایش برد هواپیما نیاز به نوع دیگری ارابه فرود احساس میشد که به ارابه فرود جمع شونده مشهور است.
ارابه فرود دو وظیفه اصلی دارد:
تحمل وزن هواپیما بر روی زمین
جذب نیروهای وارده به هواپیما در حین تماس با زمین، فرود و خزش
شکل ابتدایی ارابه های فرود به این صورت بود که دو چرخ جلوتر از مرکز ثقل هواپیما و یک چرخ کوچک در انتهای هواپیما و زیر دم قرار میگرفت که وزن کلی هواپیما را تحمل می کرد.
یکی از نکات مثبت در استفاده از این نوع ارابه فرود در هواپیماهای ملخ دار این بود که با توجه به پایین رفتن دم یک فاصله ایمن بین نوک ملخ و زمین ایجاد می شد، اما از نواقص این ارابه های فرود می توان به زاویه دید خلبان در حین عملیات نشست و برخاست هواپیما و همچنین خزش اشاره کرد، چراکه با توجه به زاویه هواپیما دید خلبان بنحوی نبود که بتواند به اطراف پرنده خود و همینطور افراد دور و بر هواپیمای خود اشراف داشته باشد، این زاویه دید نامناسب باعث می شد خلبان در هنگام فرود به باند نیز تسلط نداشته باشد که ایمنی پرواز به خطر می افتاد.
برای مرتفع کردن نواقص طرح قبلی شکل نوین ارابه های فرود (شکل کنونی ارابه های فرود در هواپیماهای مسافربری) طراحی شد که به جای چرخ زیر دم از یک چرخ در زیر دماغه هواپیما استفاده می شود (دو چرخی که در هواپیماهای اولیه جلوتر از مرکز ثقل قرار داشتند نیز عقب تر از CG قرار گرفتند) که هواپیما را در زاویه ای قرار می دهد که ایمنی آن در شرایط مختلف به خطر نمی افتد، لازم به ذکر است که چرخ زیر دماغه nose landin gear و چرخ های زیر دیگر ارابه فرود اصلی یا main landing gear نامیده می شوند.
در طراحی جدید با توجه به وزن و اندازه هواپیما تعداد متعددی ارابه فرود اصلی قرار می گیرد
برای کاهش کشیدن در زیر واگنهای هواپیما ، به بالها و / یا بدنه چرخیده با سطح چرخانده شده یا در پشت درهای نصب شده مخفی پنهان می شوند. به این چرخ دنده جمع می شود . اگر چرخ ها کاملاً جمع نشوند اما تا حدی در معرض جریان هوا بیرون بیایند ، به آن دنده نیمه جمع شدنی می گویند.
بیشتر چرخ دنده های جمع شونده به صورت هیدرولیکی کار می کنند ، اگرچه برخی از آنها با هواپیما بسیار سبک کار می کنند یا حتی به صورت دستی کار می کنند. چرخ دنده در محفظه ای بنام چاه چرخ قرار دارد.
خلبانان تأیید می کنند که تجهیزات فرود آنها پایین است و قفل شده است به "سه سبز" یا "سه در سبز" اشاره دارد ، اشاره به چراغ های نشانگر الکتریکی (یا صفحه های رنگ آمیزی شده از واحدهای نشانگر مکانیکی) از چرخ دنده / چرخ عقب و دو اصلی چرخ دنده چراغ های سبز چشمک زن یا چراغ های قرمز نشان می دهند که دنده در حال عبور است و نه بالا و قفل شده یا پایین و قفل شده است. هنگامی که چرخ دنده کاملاً محکم با قفل های بالا جمع می شود ، چراغ ها معمولاً خاموش می شوند تا از فلسفه کابین خلبان تاریک پیروی کنند. بعضی از هواپیماها دارای چراغ های نشانگر دنده
اینجا می رود از همان ابتدا
چرخ دنده های فرود هواپیمای مدرن از نوع شوک های اولئو پنوماتیک هستند ، به این معنی که آنها کمک فنرهایی هستند که از هوا و روغن اگر می خواهید
4 نوع پایه استرینگ چرخ دنده فرود وجود دارد که همه آنها برای کمک به "شوک" از فرود شما طراحی شده اند. در اینجا نحوه کار آنها وجود دارد.
Struts سخت
پایه های صلب نوع اصلی چرخ دنده ها بودند. ایده ساده بود: چرخ ها را به چارچوب هوا جوش دهید. مشکل فرود ناقص بود. یک لمس سخت به این معنی بود که انتقال بار شدید شوک مستقیماً وارد چارچوب هواپیما شد. و خلبان و مسافران قطعاً آن را احساس کردند.
اندکی بعد مهندسان هواپیما لاستیک های بادی را روی هواپیما گذاشتند و هوا بار ضربه را نرم کرد. گرچه راه حل مناسبی نبود ، اما قطعاً کمک کرد.
گرچه این روزها آنها را اغلب مشاهده نمی کنید ، هنوز هم می توانید شیب های سخت روی سطح شیب دار پیدا کنید. تقریباً همه هلی کوپترها از آنها به صورت لغزش های فلزی متصل به قاب هلیکوپتر استفاده می کنند.
استرچ های فولادی بهاری
یکی از رایج ترین سیستم های فرود استرینگ در هواپیماهای عمومی هواپیمایی ، پایه فولادی فنر است.
در بسیاری از طراحی های هواپیما ، به ویژه منفردهای سسنا ، از پایه های دنده ای فولادی فنر شوک (تخت یا لوله ای) استفاده می شود ،
با لمس هواپیما به سمت پایین ، فنرها به سمت بالا خم می شوند ، پراکنده می شوند و بار ضربه را به سرعت به چوب هواپیما منتقل می کنند که (امیدوارم) هواپیما را خم نکند. فولاد فنر محبوب است زیرا از نظر مکانیکی ساده است ، به طور معمول سبک است و به تعمیر و نگهداری کمی نیاز دارد
طناب بانجی
طناب های بانجی اغلب در هواپیماهای چرخ عقب و هواپیماهای backcountry یافت می شوند. ت.
تارهای بانجی دقیقاً همین است - یک سری تارهای الاستیک بین قاب هوا و سیستم دنده انعطاف پذیر پیچیده شده ، به چرخ دنده اجازه می دهد تا بار ضربه ای را به هواپیما منتقل کند با سرعتی که به هواپیما آسیب نرساند. در حالی که برخی هواپیماها از بالشتک لاستیکی از نوع دونات استفاده می کنند ، بیشتر آنها از رشته های جداگانه مواد الاستیک برای از بین بردن شوک استفاده می کنند ، مانند آنچه در تصویر زیر مشاهده می کنید.
طرح های ساده چرخ دنده فرود از نوع فنر هنگام استفاده در هواپیماهای سبک دارای برخی مزایای چشمگیر هستند. ارزان ، سبک وزن ، به حداقل تعداد قطعات نیاز دارند و اساساً فاقد تعمیر و نگهداری هستند. تارهای شوک لاستیکی با افزایش سن خراب می شوند و گاهی اوقات به تعویض نیاز دارند ، اما پایه های دنده ای از نوع فولاد فنر نوع ویتمن اغلب عمر بدون درز سیستم را حفظ می کنند و هیچ تعمیر و نگهداری ندارند.
متأسفانه ، آنها همچنین دو معایب جدی دارند. اول ، مقیاس آنها برای هواپیماهای سنگین تر خیلی خوب نیست. با افزایش وزن هواپیما ، اندازه فنرهای لاستیکی یا استیل یا کامپوزیت مورد نیاز برای جذب شوک ناشی از فرود به طور غیر عملی بزرگ می شود.
پایه دوم و شاید مهمتر ، پایه های دنده ای ساده از نوع فنر در مهار عقب نشستن سخت سخت نیست. هرچه فرود سخت تر باشد ، فنرهای چرخ دنده فرود انرژی بیشتری جذب می کنند و پس زدن آن انرژی بیشتری دارد. نتیجه این است که فرود سخت روی یک چرخ دنده از نوع فنر اغلب منجر به فرود برگشتی می شود - که در بهترین حالت ممکن است شرم آور باشد و در بدترین حالت ممکن است منجر به از دست رفتن کنترل و آسیب رسیدن به هواپیما شود.
آخرین نوع استرینگ تنها موردی است که یک ضربه گیر واقعی است. قفل شوک ، که اغلب به آن زنجیرهای اولئو یا هوا / روغن گفته می شود ، از ترکیبی از نیتروژن (یا گاهی هوای فشرده) و مایع هیدرولیک برای جذب و پراکندگی بارهای ضربه ای هنگام فرود استفاده می کند. می توانید آنها را در برخی هواپیماهای کوچکتر مانند Piper Cherokee پیدا کنید ، اما اغلب آنها را در هواپیماهای بزرگتر مانند جت های تجاری و هواپیماهای مسافربری پیدا می کنید.
پایه های شوک از دو سیلندر تلسکوپی استفاده می کنند که هر دو در انتهای خارجی بسته شده اند. سیلندر بالایی به هواپیما و سیلندر پایینی به چرخ دنده متصل است. سیلندر پایین ، که به طور معمول پیستون نامیده می شود ، همچنین می تواند آزادانه به داخل سیلندر بالایی بلغزد.
قایق "اولئو" از هوای فشرده یا نیتروژن همراه با مایع هیدرولیک برای جذب و از بین بردن شوک ناشی از فرود استفاده می کند ، و برای خنثی کردن پس زدن از زمین برای به حداقل رساندن فرودهای برگشتی استفاده می کند. این پایه از دو لوله تلسکوپی با انتهای بسته شده خارجی تشکیل شده است. از نوع فوقانی در طول تاریخ "سیلندر" و از لوله پایینی "پیستون" (به دلایلی که کاملاً مشخص نیستند) نامیده می شود.
دو سیلندر تلسکوپی محفظه ای با جابجایی متغیر تشکیل می دهند که حاوی مایع هیدرولیک در پایین و هوای فشرده یا نیتروژن در بالا است. وقتی کمپ در هنگام فرود فشرده می شود ، سیال هیدرولیکی غیرقابل تراکم حجم ثابت را حفظ می کند ، در حالی که گاز در بالای پایه به حجم کمتر و فشار بالاتر فشرده می شود. گاز فشرده مانند فنر عمل می کند و عملکرد مشابه سیم ضربه یا فولاد فنر یک چرخ دنده از نوع فنر ساده را انجام می دهد.
قسمت پایین لوله فوقانی ("سیلندر") به مهر و موم فشار قوی مجهز شده است تا از فشرده شدن و کشیده شدن پایه ، از خروج مایع یا گاز از محفظه جلوگیری کند. برای اتصالات شوک سبک ، مهر و موم ممکن است یک حلقه O ساده باشد. برای سازه های سنگین تر ، کمی عجیب تر می شود. درست در زیر مهر و موم ، یک حلقه اسکرابر وجود دارد که هدف آن جلوگیری از آسیب رساندن خاک و سایر مواد خارجی به مهر و موم در هنگام فشرده شدن پایه است. حلقه مهر و موم و تراشنده به طور معمول توسط یک حلقه ضربه محکم نگهداری می شود.
اگر به برش دو سیلندر نگاه کنید ، چیزی که تقریباً همیشه می یابید سیلندر پایینی پر از مایع هیدرولیک ، سیلندر بالایی پر از نیتروژن و یک سوراخ کوچک به نام روزنه است که این دو را به هم متصل می کند.
هنگام فرود ، فشار چرخ ها به زمین مایع هیدرولیک را از طریق روزنه بالا می برد و به محفظه بالا و نیتروژن پر می کند. همانطور که مایع از طریق سوراخ حرکت می کند (اتفاقاً خیلی سریع) ، گرما ایجاد می کند. و اساساً ، انرژی جنبشی سیال هیدرولیکی سریع حرکت می کند و به انرژی گرمایی منتقل می شود و شوک لمسی شما جذب می شود.
plate یک صفحه روزنه ، پایه را به دو محفظه تقسیم می کند. یک پین اندازه گیری مخروطی روزنه را به هنگام فشرده سازی قفسه منقبض می کند ، در نتیجه در هنگام لمس اولیه واکنش نرم و افزایش سفتی و میرایی با نزدیک شدن قدم به حالت کاملاً فشرده شده خود.
با جزئیات: هدف از "روغن" (در واقع ، مایع هیدرولیکی) در یک محفظه اولئو این است که عملکرد "فنر" گاز را کاهش دهد ، و سرعت جذب شوک های فرود را تحت فشار قرار دهد ، و عقب افتادگی پس از ضربه برای به حداقل رساندن احتمال فرود برگشتن.
برای تحقق این امر ، پایه دارای صفحه سوراخ است که قسمت مایع تحمل زیره را به دو اتاق تقسیم می کند. وقتی کمپ در هنگام فرود فشرده می شود ، مایع از طریق روزنه از محفظه تحتانی به محفظه فوقانی منتقل می شود ، و با گسترش امتداد عقب در هنگام عقب انداختن پس از فرود (یا برخاستن) ، مایع از طریق روزنه در جهت مخالف مجبور می شود . اندازه روزنه و ویسکوزیته سیال سرعت فشرده سازی یا کشیدگی پایه را محدود می کند.
اکنون اینجا جایی است که همه چیز کاملاً هوشمندانه انجام می شود. اکثر پایه های اولئو از یک "پین اندازه گیری" مخروطی استفاده می کنند تا اندازه موثر روزنه را تغییر دهند و بنابراین سرعت جریان سیال را از یک محفظه به اتاق دیگر تغییر دهند. هرچه کمپرس تراش بیشتر شود ، روزنه محکمتر می شود و مقاومت آن در برابر فشار یا کشش مقاومت بیشتری دارد.
نتیجه این است که یک چرخ دنده فرود می شود که در هنگام لمس بسیار نرم شروع به کار می کند ، و با فشرده شدن پایه و اتلاف انرژی فرود سفت می شود. وقتی تقریباً کاملاً فشرده می شوید پس از فرود ، پایه کاملاً میرایی شده و به آرامی و با اکراه زیاد عقب می رود
چرا مکانیسم های عقب نشینی ارابه فرود بیشتر بر اساس سیستم چهار میله ای است؟به نظر می رسد در بیشتر موارد حدود یک سیستم چهار میله باشد. این در نگاه اول پیچیده تر از آنچه لازم است به نظر می رسد، چرا طراحی با یک لولای ساده با یک محرک که پایه را به داخل می کشد کافی نیست؟
بیشتر مکانیزمهای پسکشی شامل قطعات زیادی با حرکات پیچیده است. من می خواهم سینماتیکی را درک کنم که استفاده از بیش از یک یا دو میله را توجیه می کند. به طور شهودی، تنها می توان انتظار داشت که یک محرک مستقیماً روی ارابه فرود عمل کند و آن را در موقعیت خود نگه دارد، اما واقعیت همیشه شامل سینماتیک چرخشی پیچیده است.
این سوال در مورد سینماتیک آهنگ های فلپ نیز صدق می کند، که به نظر می رسد نسبتاً پیچیده نیز باشد.شماتیک بالا (با چهار قوس که به راحتی قابل ردیابی است) امیدواریم به عنوان نقطه شروع عمل کند. این یک مکانیسم نسبتاً ساده است، مثلاً در مقایسه با ارابه فرود بدنه A380.
این اصل را می توان با امتحان راه حل پیشنهادی توضیح داد و ببینید با چه مشکلاتی مواجه می شویم. اگر فقط یک محرک را برای چرخاندن ارابه فرود در نقطه اتصال* به هواپیما قرار دهید (دایره سرخابی رنگ)، با مشکلات زیادی مواجه خواهید شد: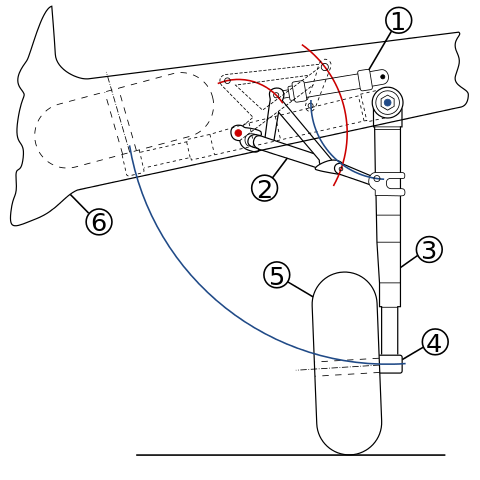
بدون مکانیسم قفل
بازوی اهرمی کوچک
نیروی محرک بزرگتر مورد نیاز است
حرکت محدود (بدون امکان پس زدن/بسط کامل)، مگر اینکه
بسته بندی مکانیزم در حجم کم لازم نیست
پیوندهای بیشتری اضافه شده است.
نتیجه نهایی: بازگشت به نقطه اول، 3 مشکل اول، و فضایی برای آن در حجم محدود بال/شکم وجود ندارد.
اگر محرک را در مکان مناسبتری مانند نزدیک ریشه بال قرار دهید، نمیتواند از مسیر برای قرار دادن ارابه فرود خارج شود، مگر اینکه یک بال غیرواقعی بسیار ضخیم داشته باشید.
از شماتیک بالا توجه داشته باشید که سیلندر هیدرولیک (1) فقط باید در یک فاصله نسبتاً کوتاه جمع شود / منبسط شود تا پسکشی / امتداد را انجام دهد.
فلپ ها و نوارها نیز پیچیده هستند، نه تنها باید چیزی را حول یک محور بچرخانید، بلکه باید آن را نیز ترجمه کنید، شکاف های دیده شده را ایجاد کنید، و آن را به طور مرتب در حجم کم بسته بندی کنید.
اگر این هدف اساسی اکنون روشن است، گام بعدی این است که بیشتر بخوانید و مدلها بسازید و/یا با نرمافزار شبیهسازی سینماتیک بازی کنید. سعی کنید همان مکانیزم را با یک لینک بسازید و سپس سعی کنید مشکلاتی را که با آن مواجه هستید حل کنید.
ارابه فرود سازه اي است كه هواپيما در هنگام توقف يا حركت روي زمين بر آن تكيه دارد اين وسيله داراي دو وظيفه اصلي است ببینید
١- تحمل وزن هواپيما روي زمين
٢- جذب نيرو هاي وارده به هواپيما در حين تماس با زمين
در طراحي هاي جديد با توجه به وزن و اندازه هواپيما تعداد متعددي ارابه فرود اصلي وجود دارد.
به طوري كه بين بدنه و لاستيك هر ارابه فرود يك سيلندر و پيستون وجود دارد كه در داخل آن روغن هيدروليك و نيتروژن وجود دارد, نيتروژن ضربه هاي هنگام خزش و روغن ضربه هاي هنگام فرود را خنثي ميكند.
انواع Landing Gear
برخي از انواع لندينگ گير عبارت اند از :
١- لندينگ گير ثابت فنري
٢- لندينگ گير ثابت تلسكوپي
٣- لندينگ گير ثابت اهرمي
٤- لندينگ گير جمع شونده تلسكوپي
٥- لندينگ گير جمع شونده اهرمي
طراحي لندگينگ گير
معيار هايي كه در بخش طراحي لندينگ گير مطرح هستند عبارت اند از ١- ضريب پسا ٢- وزن فرود ٣- پايداري زميني هواگرد ٤- قابليت هدايت زميني ٥- واكنش در مقابل نوسانات زميني
لندينگ گير در هواپيما هاي سبك
ارابه فرود در هواپيما هاي سبك معمولا به دو صورت ميباشد در حالت اول دو چرخ بر روي يك مهور به عنوان ارابه فرود اصلي در جلوي بدنه و يك چرخه دُم هم در عقب قرار دارد• در حالت دوم دو چرخ بر روي يك محور در وسط بدنه و يك چرخ هم در زير دماغه هواپيما قرار ميگرد.
به چرخ زير دماغهnose wheel يا tree cycle ميگويند و چرخ زير دُم هواپيما tail wheel گويند .
ارابه فرود هواپيما از نظر هدايت پذيري
-steerable:به هواپيمايي با چرخ دماغه مه قابليت هدايت دارد.
-castering:نوعي از طراحي چرخ دماغه هواپيما كه قابليت هدايت پذيري ندارد
-differential braking:به قابليت استفاده جداگانه از ترمز ها گفته ميشود.ترمز هاي هواپيما بر روي چرخ هاي اصلي قرار دارند و وجود differential braking براي چرخ هاي castering الزامي است، زيرا بدون وجود اين قابليت هواپيما توان چرخش بر روي زمين را ندارد اما در هواپيما هاي steerable قابليت فرمان پذيري بر روي زمين افزايش ميابد
: oleo strutاين سيستم داراي سيلندر، پيستون درون آن، محفظه روغن و هوا است كه ضربات ناشي از فرود را جذب كرده و رها ميسازد. داخل اين سيلندر و پيستون ها علاوه بر هوا روغن هيدروليك و نيتروژن وجود دارد، نيتروژن ضربه هاي هنگام خزش و روغن هيدروليك ضربه هاي هنگام فرود را خنثي ميكند.
بطور کلی ارابه فرود دارای شش نوع یا حالت اصلی است .
یک چرخ اصلی و سه چرخ کوچک (Single main )
چرخ دمی (Tail gear )
4 چرخه (quadricycle )
دو چرخ اصلی و دو چرخ کوچک (Bicycle )
سه چرخه (یا چرخ دماغه ای ) (Tricycle یا Nose gear )
چند چرخه (Multi bogey )
بدون ارابه
مشخصات انواع ارابه فرود
به طور خلاصه مشخصات انواع ارابه فرود به شرح زیر است :
الف) یک چرخ اصلی و سه چرخ کوچک
از این نوع ارابه فرود در بسیاری از هواسرها به دلیل سادگی زیاد استفاده می شود .چرخ اصلی هم می تواند جلوتر از مرکز ثقل و یا در عقب آن باشد که در این صورت باید زیر بدنه و جلوی مرکز ثقل یک سکان (Skid) قرار داد .
ب ) دو چرخه (Bicycle )
این نوع ارابه فرود دارای دو چرخ اصلی است یکی جلو ودیگری در عقب مرکز ثقل ، به اضافه دو چرخ کوچک دیگر در زیر بالها برای حفظ پایداری هواپیما در روی زمین قرار داده می شود. چرخ عقب این نوع ارابه فرود آنقدر عقب تر از مرکز ثقل است که هواپیما باید بطور افقی فرود آمده و بلند شود. در این صورت هواپیما باید طوری طراحی شده باشد که با زاویه حمله کم بال، بتواند ضریب برآی زیادی تولید کند (یعنی باید دارای A.R، مقطع ایرفول کلفت و فلپ قوی باشد) این نوع فقط در هواپیماهایی استفاده می شود که دارای بدنه لاغر و دراز و بالهای پهنی می باشند . هواپیمای B47 دارای چنین ارابه فرودی است .
ج ) ارابه فرود چرخ دمی (Tail gear )
این نوع ارابه فرود دارای 2 چرخ اصلی در جلوی مرکز ثقل و یک چرخ کمکی در زیر دم است. از آنجا که چرخ عقب بسیار کوچکتر از چرخهای جلو است، گاهی به جای آن یک تیغه Skid قرار می دهند، در این صورت به آن Tail Dragger گویند. این نوع ارابه فرود قبلا به عنوان ارابه فرود معمولی Conventioanal نامیده میشد چرا که در 40 سال اول هوانوردی بطور وسیع استفاده می شد. این ارابه فرود دارای وزن و پسای کمتر بوده و به ملخ فاصله بیشتری از زمین می دهد. همچنین در زمینهای ناهموار، باعث می شود بال، برای بیشتری در مقایسه با نوع سه چرخه بدهد. با این وجود، این نوع ارابه فرود، ذاتا ناپایدار است. اگر هواپیما شروع به دور زدن در روی زمین بکند، بدلیل اینکه مرکز ثقل عقب تر از چرخهای اصلی است، دور زدن مداوم در حال سخت تر شدن است. و وقتی هواپیما می خواهد خود را صاف کند، یا نوک یکی از بالها به زمین می خورد و یا ارابه فرود می شکند و یا هواپیما از باند خارج می شود. یکی از اشکالات این نوع ارابه فرود این است که هواپیما وقتی روی زمین است افقی نیست و دماغه مقداری بالاتر از دم قرار دارد. لذا خلبان و مسافرین در هنگام سوار شدن قدری مشکل دارند. اشکال دیگر این نوع ارابه فرود عدم وجود بینایی کافی در هنگام حرکت روی باند فرودگاه است.
د) سه چرخ یا چرخ دماغه ای Tricycleو یا Nose Gear
عمومی ترین و شایع ترین نوع ارابه فرود، نوع سه چرخه است که دارای دو چرخ اصلی در عقب مرکز ثقل و یک چرخ کمکی در جلوی مرکز ثقل است. بر خلاف چرخ دمی، هر سه چرخ این نوع ارابه فرود هم اندازه اند و بنابر این هواپیما روی باند کاملا افقی قرار دارد. بدلیل اینکه مرکز ثقل در جلوی چرخهای اصلی قرار دارد، هواپیما در روی زمین پایدار است و نیز هنگام فرود می تواند بصورت کج بنشیند.
ه) چهار چرخه Quadricycle
ارابه فرود چهار چرخه مانند ارابه فرود دو چرخه است جز اینکه چرخها در کناره های بدنه قرار دارند. با این ارابه فرود نیز هواپیما مجبور است بطور افقی بنشیند و بلند شود. . چرا که دارای مزیت داشتن کف اتاق نزدیک به زمین هستند که بسیار مناسب بارگیری است. بطور کلی هرچه وزن هواپیما افزایش یابد، تعداد چرخها نیز افزایش می یابد و لذا تمامی پنج حالت فوق می تواند دارای 4-2 یا تعداد بیشتری چرخ بجای چرخهای اصلی باشند. هرچه وزن افزایش یابد ابعاد چرخها افزایش می یابد و لذا با استفاده از چرخهای بیشتر، ابعاد چرخها کاهش یافته و بار بین چرخها تقسیم می شود.
و) چند چرخه Multi Bogey
جهت رعایت مسائل ایمنی، و نیز کاهش ابعاد هر چرخ استفاده از نوع چند چرخی با داشتن 4 چرخ یا بیشتر بسیار بهتر است. وقتی نوع چند چرخه استفاده می شود، آنها به سازه ای بنام Bogey وصل می شوند که آنها نیز به انتهای پایه جذب کننده ضربه گیر وصل می شوند.
بطور کلی وقتی جرم هواپیما زیر lb 50.000باشد، برای هر پایه یک چرخ استفاده می شود، هر چند جهت رعایت مسائل ایمنی ( پنجری) استفاده از دو چرخ برای هر پایه بهتر است. در صورتی که وزن هواپیما بین 50.000lb و 150.000lb باشد معمول است برای هر پایه دو چرخ قرار می دهند حتی گاهی 2 چرخ برای هر پایه تا جرم 250000lb نیز استفاده می شود. هواپیماهای مسافربری پهن پیکر مانند B747,A310 دارای ارابه فرود چند چرخه اند.
ز) بدون ارابه فرود
هواپیما می تواند ارابه فرود نداشته باشد. این حالت بندرت در هواپیما یافت می گردد، زیرا در عمل با مشکلات فراوانی روبه رو می شوند.این نوع ارابه فرود بیشتر در پرند های بدون سر نشین استفاه می شوند. هواپیماهایی که قرار است روی آب فرود آمده و از روی آن برخیزند، ارابه فرود مخصوصی دارند تا وسیله سر خوردن هواپیما را روی آب فراهم آورد. به این نوع ارابه فرود وسیله سرش یا تیغه گویند.
3- ارابه فرود ثابت و یا جمع شونده
یکی از تصمیمات اولیه در طراحی ارابه فرود، این است که آیا ارابه فرود در طول پرواز ثابت باشد و یا اینکه قابلیت جمع شدن در داخل هواپیما را داشته باشد. معمولا این تصمیم پس از آنکه نوع ارابه فرود تعیین گردید گرفته می شود. بطور کلی ارابه فرود ثابت Fixed در مقایسه با ارابه فرود جمع شونده Retractable دارای مزایا و معایب زیر است:
الف- مزایا:
هزینه ساخت هواپیما کمتر است.
هواپیما سبک تر خواهد بود.
طراحی و ساخت آسانتر است.
ب- معایب:
دارای نیروی پسای بیشتری است.
کارایی هواپیما کاهش می یابد.
با توجه به ایمنی نشست و برخاست هواپیما، بهتر آن است که ارابه فرود در بال جمع گردد. در شکل زیر انواع ارابه فرود که در زیر بال، داخل بدنه، کنار بدنه، در داخل بال و بدنه، در داخل پوشش موتور نشان داده شده است.
بطور کلی دو محل اصلی جمع شدن ارابه فرود، بال و بدنه است. بطور کلی طراحی هواپیمایی که ارابه فرودش قرار است در بدنه جمع شود آسانتر از هواپیماهایی است که ارابه فرودش در بال جمع می گردد.
3-اصول کلی ساختمان انواع ارابه فرود
در این نوع ارابه فرود، بطور کلی محل مرکز ثقل باید قدری عقب تر از نقطه وسط بین دو چرخ باشد ( به عبارت دیگر فاصله بین مرکز ثقل تا چرخ جلو بایستی بیشتر از فاصله مرکز ثقل تا چرخ عقب باشد). در شکل زیر این امر نشان داده شده است.
در صورتیکه هواپیما افقی باشد، زاویه بین خط مماس مشترک چرخهای جلو وعقب و خط افق باید بین 10تا 15 درجه باشد. همچنین زاویه خطوط گذرنده از عقب ترین و جلوترین محل مرکز ثقل چرخ جلو با خط قائم باید بین 16-25 درجه عقب تر از خط عمودی چرخ جلو باشند. در صورتی که مرکز ثقل خیلی جلو باشد، احتمال کله معلق شدن هواپیما وجود دارد و در صورت خیلی عقب بودن احتمال دور زدن هواپیما دور خودش دو روی زمین در هنگام حرکت وجود دارد. برای جلوگیری از واژگون شدن هواپیما به بغل نیز باید چرخ عقب در راستای مرکز ثقل و دو چرخ جلو باید دارای زاویه بیش از 25 درجه با مرکز ثقل باشند سیستمهای تابع ارابه فرود
ضربه گیرShock Absorber
یکی از ماموریتهای ارابه فرود، جذب ضربه به هنگام نشستن بد و نیز هنگام بارگیری و حرکت در باند بوده که حرکت را نرم می کند. بخشی از این کار توسط تایرها انجام می شود. بعضی هوپیماهای دست ساز و اکثر هواسرها نیز فاقد سیستم مجزای ضربه گیر هستند. ضربه گیری آنها تنها متکی به لاستیکها است و دارای محور سخت هستند. تایرها در هنگام فرود و یا برخورد با مانع سرعت گیر قدری فشرده شده و لذا ضربه را جذب می کنند. انواع مشهور ضربه گیر عبارتند از:
- بدون ضربه گیر Rigid Axle
- فنر سخت Solid Spring
- لاستیک و لولا Rubber & Hinge
- سیستم هیدورولیکی لوله ای Oleo Pneumatic Shoch Strut
- سیستم هیدرولیکی لولاییPneumatic Hinge Oleo
1- ضربه گیر فنر سخت:
ضربه گیر فنر سخت در بسیاری از هواپیماهای عمومی هوانوردی استفاده می شود ( مخصوصا هواپیماهای سسنا) . این نوع ضربه گیر بسیار ساده است ولی از انواع دیگر سنگین تر است. فنر سخت از نوع تخت است که با خم شدن ضربه را جذب می کند. البته این باعث می شود که تایر نسبت به باند کج شود.
2- ضربه گیر اهرمی یا لاستیک و لولا:
این نوع ضربه گیر در هواپیماهای قدیمی استفاده فراوان داشت. مثلا در هواپیماهای Piper Cub پای چرخ به بدنه لولا شده و با استفاده از کابلهای لاستیکی در زیر پای چرخ ضربه توسط کشش آنها جذب می شود. این نوع ارابه فرود سبک است ولی پسای زیادی دارد.
3- ضربه گیر هیدرولیکی:
امروزه عمومی ترین نوع ضربه گیر، هیدرولیکی است. در این ضربه گیر ضربه بوسیله اثری شیبه اثر فنر خنثی می شود. برای افرایش راندمان ضربه گیر، اکثر ضربه گیرهای هیدرولیکی دارای مکانیزمی هستند که توسط آن مقدار فشار وارده بر چرخها را با استفاده از میزان ضربه تنظیم می کند.
جدول 1- راندمان انواع ضربه گیر
راندمان نوع ضربه گیر
0.5 فنر تخت فولادی
0.62 فنر مارپیچی فولادی
0.45 چرخ بدون ضربه گیر
0.6 تکه لاستیکی
0.58 سیستمهای لاستیکی
0.65-0.8 هیدرولیکی
ارابه فرود یا Landing Gearتمامی هواپیماهایی که در جهان از ابتدای اختراع تا به الان ساخته شده اند، برای فرود آمدن به ۲ نوع ارابه و یا چرخ فرود اتکا می کنند و از آن چرخ ها برای فرود خود استفاده می کنند. در این حالت یکی ارابه های اصلی که در زیر بال و یا بدنه ی اصلی قرار گرفته است و ارابه ای دیگر که در زیر دماغه ی هواپیما است، از آن برای حفظ تعادل استفاده می شود.قسمتي از هواپيما كه چرخها در آن قرار ميگيرند، محل جمع شدن ارابه فرود ميگويند و فقط به هنگام نشست و برخاست هواپيما از آنها استفاده ميشود. عمل جمع شدن و باز شدن چرخها توسط عملكنندههايي با استفاده از سيستمهاي هواپيما از قبيل هيدروليك و ....صورت ميگيرد و به هواپيما اجازه ميدهند روي زمين فرود آمده و حركت كند و در طول پرواز، هواپيما به آنها نياز ندارد. به گزارش خبرنگار سرويس : چرخها بعد از برخاستن هواپيما جمع ميشوند و اين عمل به يك دليل مهم صورت ميگيرد و آن اين است كه براي آن كه هواپيما سرعتش زياد شود، بايد كمترين مقاومت را در برابر هوا داشته باشد. يعني بايد به بيشترين حالت آيروديناميكي ممكن برسد. اگر چرخها جمع نشوند يك مقاومت جدي در برابر باد ايجاد خواهد شد و مانند ترمز باعث كاهش سرعت ميشوند. هواپيما چگونه روي باند فرود ترمز كرده و متوقف ميشود؟ هنر خلبان اين است كه هواپيما را آرام در محلي مشخص و با سرعتي خاص روي باند فرودگاه بنشاند. اگر باد جانبي خيلي قوي باشد، سكان هدايت بايد بسرعت وارد عمل شود. وقتي هواپيما با زمين تماس ميگيرد، سرعتش بيش از 200 كيلومتر در ساعت است كه اين سرعت بايد به شدت كاهش يابد، در غير اين صورت هواپيما از باند خارج ميشود. با اين كار بالهها بلند ميشوند و زمينه ترمز در هواپيما را فراهم ميكنند
هواپیما
ارابه فرود سازه ای است که هواپیما در هنگام توقف یا حرکت بر روی زمین از آن استفاده می کند. ارابه فرود معمولاً دارای چرخ است ولی در برخی هواپیماها اسکی (استفاده بر روی برف) و محفظه هوا (استفاده بر روی آب) نیز به جای چرخ به کار می رود.
در نگاه کلی ارابه فرود را به دو نوع ثابت و جمع شونده تقسیم می کنند، در ابتدا تمام هواپیماها دارای ارابه فرود ثابت بودند همانطور که از اسم این نوع ارابه فرود معلوم است این ارابه فرودها روی بدنه هواپیما ثابت هستند و پس از بلند شدن هواپیما از روی زمین تغییری در مکان ارابه فرود به وجود نمی آید، با پیشرفت تکنولوژی و افزایش سرعت هواپیماها و برای کاهش درگ و به طبع کاهش مصرف سوخت و در نتیجه افزایش برد هواپیما نیاز به نوع دیگری ارابه فرود احساس میشد که به ارابه فرود جمع شونده مشهور است.
ارابه فرود دو وظیفه اصلی دارد:
تحمل وزن هواپیما بر روی زمین
جذب نیروهای وارده به هواپیما در حین تماس با زمین، فرود و خزش
شکل ابتدایی ارابه های فرود به این صورت بود که دو چرخ جلوتر از مرکز ثقل هواپیما و یک چرخ کوچک در انتهای هواپیما و زیر دم قرار میگرفت که وزن کلی هواپیما را تحمل می کرد.
یکی از نکات مثبت در استفاده از این نوع ارابه فرود در هواپیماهای ملخ دار این بود که با توجه به پایین رفتن دم یک فاصله ایمن بین نوک ملخ و زمین ایجاد می شد، اما از نواقص این ارابه های فرود می توان به زاویه دید خلبان در حین عملیات نشست و برخاست هواپیما و همچنین خزش اشاره کرد، چراکه با توجه به زاویه هواپیما دید خلبان بنحوی نبود که بتواند به اطراف پرنده خود و همینطور افراد دور و بر هواپیمای خود اشراف داشته باشد، این زاویه دید نامناسب باعث می شد خلبان در هنگام فرود به باند نیز تسلط نداشته باشد که ایمنی پرواز به خطر می افتاد.
برای مرتفع کردن نواقص طرح قبلی شکل نوین ارابه های فرود (شکل کنونی ارابه های فرود در هواپیماهای مسافربری) طراحی شد که به جای چرخ زیر دم از یک چرخ در زیر دماغه هواپیما استفاده می شود (دو چرخی که در هواپیماهای اولیه جلوتر از مرکز ثقل قرار داشتند نیز عقب تر از CG قرار گرفتند) که هواپیما را در زاویه ای قرار می دهد که ایمنی آن در شرایط مختلف به خطر نمی افتد، لازم به ذکر است که چرخ زیر دماغه nose landin gear و چرخ های زیر دیگر ارابه فرود اصلی یا main landing gear نامیده می شوند.
در طراحی جدید با توجه به وزن و اندازه هواپیما تعداد متعددی ارابه فرود اصلی قرار می گیرد
برای کاهش کشیدن در زیر واگنهای هواپیما ، به بالها و / یا بدنه چرخیده با سطح چرخانده شده یا در پشت درهای نصب شده مخفی پنهان می شوند. به این چرخ دنده جمع می شود . اگر چرخ ها کاملاً جمع نشوند اما تا حدی در معرض جریان هوا بیرون بیایند ، به آن دنده نیمه جمع شدنی می گویند.
بیشتر چرخ دنده های جمع شونده به صورت هیدرولیکی کار می کنند ، اگرچه برخی از آنها با هواپیما بسیار سبک کار می کنند یا حتی به صورت دستی کار می کنند. چرخ دنده در محفظه ای بنام چاه چرخ قرار دارد.
خلبانان تأیید می کنند که تجهیزات فرود آنها پایین است و قفل شده است به "سه سبز" یا "سه در سبز" اشاره دارد ، اشاره به چراغ های نشانگر الکتریکی (یا صفحه های رنگ آمیزی شده از واحدهای نشانگر مکانیکی) از چرخ دنده / چرخ عقب و دو اصلی چرخ دنده چراغ های سبز چشمک زن یا چراغ های قرمز نشان می دهند که دنده در حال عبور است و نه بالا و قفل شده یا پایین و قفل شده است. هنگامی که چرخ دنده کاملاً محکم با قفل های بالا جمع می شود ، چراغ ها معمولاً خاموش می شوند تا از فلسفه کابین خلبان تاریک پیروی کنند. بعضی از هواپیماها دارای چراغ های نشانگر دنده
اینجا می رود از همان ابتدا
چرخ دنده های فرود هواپیمای مدرن از نوع شوک های اولئو پنوماتیک هستند ، به این معنی که آنها کمک فنرهایی هستند که از هوا و روغن اگر می خواهید
4 نوع پایه استرینگ چرخ دنده فرود وجود دارد که همه آنها برای کمک به "شوک" از فرود شما طراحی شده اند. در اینجا نحوه کار آنها وجود دارد.
Struts سخت
پایه های صلب نوع اصلی چرخ دنده ها بودند. ایده ساده بود: چرخ ها را به چارچوب هوا جوش دهید. مشکل فرود ناقص بود. یک لمس سخت به این معنی بود که انتقال بار شدید شوک مستقیماً وارد چارچوب هواپیما شد. و خلبان و مسافران قطعاً آن را احساس کردند.
اندکی بعد مهندسان هواپیما لاستیک های بادی را روی هواپیما گذاشتند و هوا بار ضربه را نرم کرد. گرچه راه حل مناسبی نبود ، اما قطعاً کمک کرد.
گرچه این روزها آنها را اغلب مشاهده نمی کنید ، هنوز هم می توانید شیب های سخت روی سطح شیب دار پیدا کنید. تقریباً همه هلی کوپترها از آنها به صورت لغزش های فلزی متصل به قاب هلیکوپتر استفاده می کنند.
استرچ های فولادی بهاری
یکی از رایج ترین سیستم های فرود استرینگ در هواپیماهای عمومی هواپیمایی ، پایه فولادی فنر است.
در بسیاری از طراحی های هواپیما ، به ویژه منفردهای سسنا ، از پایه های دنده ای فولادی فنر شوک (تخت یا لوله ای) استفاده می شود ،
با لمس هواپیما به سمت پایین ، فنرها به سمت بالا خم می شوند ، پراکنده می شوند و بار ضربه را به سرعت به چوب هواپیما منتقل می کنند که (امیدوارم) هواپیما را خم نکند. فولاد فنر محبوب است زیرا از نظر مکانیکی ساده است ، به طور معمول سبک است و به تعمیر و نگهداری کمی نیاز دارد
طناب بانجی
طناب های بانجی اغلب در هواپیماهای چرخ عقب و هواپیماهای backcountry یافت می شوند. ت.
تارهای بانجی دقیقاً همین است - یک سری تارهای الاستیک بین قاب هوا و سیستم دنده انعطاف پذیر پیچیده شده ، به چرخ دنده اجازه می دهد تا بار ضربه ای را به هواپیما منتقل کند با سرعتی که به هواپیما آسیب نرساند. در حالی که برخی هواپیماها از بالشتک لاستیکی از نوع دونات استفاده می کنند ، بیشتر آنها از رشته های جداگانه مواد الاستیک برای از بین بردن شوک استفاده می کنند ، مانند آنچه در تصویر زیر مشاهده می کنید.
طرح های ساده چرخ دنده فرود از نوع فنر هنگام استفاده در هواپیماهای سبک دارای برخی مزایای چشمگیر هستند. ارزان ، سبک وزن ، به حداقل تعداد قطعات نیاز دارند و اساساً فاقد تعمیر و نگهداری هستند. تارهای شوک لاستیکی با افزایش سن خراب می شوند و گاهی اوقات به تعویض نیاز دارند ، اما پایه های دنده ای از نوع فولاد فنر نوع ویتمن اغلب عمر بدون درز سیستم را حفظ می کنند و هیچ تعمیر و نگهداری ندارند.
متأسفانه ، آنها همچنین دو معایب جدی دارند. اول ، مقیاس آنها برای هواپیماهای سنگین تر خیلی خوب نیست. با افزایش وزن هواپیما ، اندازه فنرهای لاستیکی یا استیل یا کامپوزیت مورد نیاز برای جذب شوک ناشی از فرود به طور غیر عملی بزرگ می شود.
پایه دوم و شاید مهمتر ، پایه های دنده ای ساده از نوع فنر در مهار عقب نشستن سخت سخت نیست. هرچه فرود سخت تر باشد ، فنرهای چرخ دنده فرود انرژی بیشتری جذب می کنند و پس زدن آن انرژی بیشتری دارد. نتیجه این است که فرود سخت روی یک چرخ دنده از نوع فنر اغلب منجر به فرود برگشتی می شود - که در بهترین حالت ممکن است شرم آور باشد و در بدترین حالت ممکن است منجر به از دست رفتن کنترل و آسیب رسیدن به هواپیما شود.
آخرین نوع استرینگ تنها موردی است که یک ضربه گیر واقعی است. قفل شوک ، که اغلب به آن زنجیرهای اولئو یا هوا / روغن گفته می شود ، از ترکیبی از نیتروژن (یا گاهی هوای فشرده) و مایع هیدرولیک برای جذب و پراکندگی بارهای ضربه ای هنگام فرود استفاده می کند. می توانید آنها را در برخی هواپیماهای کوچکتر مانند Piper Cherokee پیدا کنید ، اما اغلب آنها را در هواپیماهای بزرگتر مانند جت های تجاری و هواپیماهای مسافربری پیدا می کنید.
پایه های شوک از دو سیلندر تلسکوپی استفاده می کنند که هر دو در انتهای خارجی بسته شده اند. سیلندر بالایی به هواپیما و سیلندر پایینی به چرخ دنده متصل است. سیلندر پایین ، که به طور معمول پیستون نامیده می شود ، همچنین می تواند آزادانه به داخل سیلندر بالایی بلغزد.
قایق "اولئو" از هوای فشرده یا نیتروژن همراه با مایع هیدرولیک برای جذب و از بین بردن شوک ناشی از فرود استفاده می کند ، و برای خنثی کردن پس زدن از زمین برای به حداقل رساندن فرودهای برگشتی استفاده می کند. این پایه از دو لوله تلسکوپی با انتهای بسته شده خارجی تشکیل شده است. از نوع فوقانی در طول تاریخ "سیلندر" و از لوله پایینی "پیستون" (به دلایلی که کاملاً مشخص نیستند) نامیده می شود.
دو سیلندر تلسکوپی محفظه ای با جابجایی متغیر تشکیل می دهند که حاوی مایع هیدرولیک در پایین و هوای فشرده یا نیتروژن در بالا است. وقتی کمپ در هنگام فرود فشرده می شود ، سیال هیدرولیکی غیرقابل تراکم حجم ثابت را حفظ می کند ، در حالی که گاز در بالای پایه به حجم کمتر و فشار بالاتر فشرده می شود. گاز فشرده مانند فنر عمل می کند و عملکرد مشابه سیم ضربه یا فولاد فنر یک چرخ دنده از نوع فنر ساده را انجام می دهد.
قسمت پایین لوله فوقانی ("سیلندر") به مهر و موم فشار قوی مجهز شده است تا از فشرده شدن و کشیده شدن پایه ، از خروج مایع یا گاز از محفظه جلوگیری کند. برای اتصالات شوک سبک ، مهر و موم ممکن است یک حلقه O ساده باشد. برای سازه های سنگین تر ، کمی عجیب تر می شود. درست در زیر مهر و موم ، یک حلقه اسکرابر وجود دارد که هدف آن جلوگیری از آسیب رساندن خاک و سایر مواد خارجی به مهر و موم در هنگام فشرده شدن پایه است. حلقه مهر و موم و تراشنده به طور معمول توسط یک حلقه ضربه محکم نگهداری می شود.
اگر به برش دو سیلندر نگاه کنید ، چیزی که تقریباً همیشه می یابید سیلندر پایینی پر از مایع هیدرولیک ، سیلندر بالایی پر از نیتروژن و یک سوراخ کوچک به نام روزنه است که این دو را به هم متصل می کند.
هنگام فرود ، فشار چرخ ها به زمین مایع هیدرولیک را از طریق روزنه بالا می برد و به محفظه بالا و نیتروژن پر می کند. همانطور که مایع از طریق سوراخ حرکت می کند (اتفاقاً خیلی سریع) ، گرما ایجاد می کند. و اساساً ، انرژی جنبشی سیال هیدرولیکی سریع حرکت می کند و به انرژی گرمایی منتقل می شود و شوک لمسی شما جذب می شود.
plate یک صفحه روزنه ، پایه را به دو محفظه تقسیم می کند. یک پین اندازه گیری مخروطی روزنه را به هنگام فشرده سازی قفسه منقبض می کند ، در نتیجه در هنگام لمس اولیه واکنش نرم و افزایش سفتی و میرایی با نزدیک شدن قدم به حالت کاملاً فشرده شده خود.
با جزئیات: هدف از "روغن" (در واقع ، مایع هیدرولیکی) در یک محفظه اولئو این است که عملکرد "فنر" گاز را کاهش دهد ، و سرعت جذب شوک های فرود را تحت فشار قرار دهد ، و عقب افتادگی پس از ضربه برای به حداقل رساندن احتمال فرود برگشتن.
برای تحقق این امر ، پایه دارای صفحه سوراخ است که قسمت مایع تحمل زیره را به دو اتاق تقسیم می کند. وقتی کمپ در هنگام فرود فشرده می شود ، مایع از طریق روزنه از محفظه تحتانی به محفظه فوقانی منتقل می شود ، و با گسترش امتداد عقب در هنگام عقب انداختن پس از فرود (یا برخاستن) ، مایع از طریق روزنه در جهت مخالف مجبور می شود . اندازه روزنه و ویسکوزیته سیال سرعت فشرده سازی یا کشیدگی پایه را محدود می کند.
اکنون اینجا جایی است که همه چیز کاملاً هوشمندانه انجام می شود. اکثر پایه های اولئو از یک "پین اندازه گیری" مخروطی استفاده می کنند تا اندازه موثر روزنه را تغییر دهند و بنابراین سرعت جریان سیال را از یک محفظه به اتاق دیگر تغییر دهند. هرچه کمپرس تراش بیشتر شود ، روزنه محکمتر می شود و مقاومت آن در برابر فشار یا کشش مقاومت بیشتری دارد.
نتیجه این است که یک چرخ دنده فرود می شود که در هنگام لمس بسیار نرم شروع به کار می کند ، و با فشرده شدن پایه و اتلاف انرژی فرود سفت می شود. وقتی تقریباً کاملاً فشرده می شوید پس از فرود ، پایه کاملاً میرایی شده و به آرامی و با اکراه زیاد عقب می رود
چرا مکانیسم های عقب نشینی ارابه فرود بیشتر بر اساس سیستم چهار میله ای است؟به نظر می رسد در بیشتر موارد حدود یک سیستم چهار میله باشد. این در نگاه اول پیچیده تر از آنچه لازم است به نظر می رسد، چرا طراحی با یک لولای ساده با یک محرک که پایه را به داخل می کشد کافی نیست؟
بیشتر مکانیزمهای پسکشی شامل قطعات زیادی با حرکات پیچیده است. من می خواهم سینماتیکی را درک کنم که استفاده از بیش از یک یا دو میله را توجیه می کند. به طور شهودی، تنها می توان انتظار داشت که یک محرک مستقیماً روی ارابه فرود عمل کند و آن را در موقعیت خود نگه دارد، اما واقعیت همیشه شامل سینماتیک چرخشی پیچیده است.
این سوال در مورد سینماتیک آهنگ های فلپ نیز صدق می کند، که به نظر می رسد نسبتاً پیچیده نیز باشد.شماتیک بالا (با چهار قوس که به راحتی قابل ردیابی است) امیدواریم به عنوان نقطه شروع عمل کند. این یک مکانیسم نسبتاً ساده است، مثلاً در مقایسه با ارابه فرود بدنه A380.
این اصل را می توان با امتحان راه حل پیشنهادی توضیح داد و ببینید با چه مشکلاتی مواجه می شویم. اگر فقط یک محرک را برای چرخاندن ارابه فرود در نقطه اتصال* به هواپیما قرار دهید (دایره سرخابی رنگ)، با مشکلات زیادی مواجه خواهید شد:
بدون مکانیسم قفل
بازوی اهرمی کوچک
نیروی محرک بزرگتر مورد نیاز است
حرکت محدود (بدون امکان پس زدن/بسط کامل)، مگر اینکه
بسته بندی مکانیزم در حجم کم لازم نیست
پیوندهای بیشتری اضافه شده است.
نتیجه نهایی: بازگشت به نقطه اول، 3 مشکل اول، و فضایی برای آن در حجم محدود بال/شکم وجود ندارد.
اگر محرک را در مکان مناسبتری مانند نزدیک ریشه بال قرار دهید، نمیتواند از مسیر برای قرار دادن ارابه فرود خارج شود، مگر اینکه یک بال غیرواقعی بسیار ضخیم داشته باشید.
از شماتیک بالا توجه داشته باشید که سیلندر هیدرولیک (1) فقط باید در یک فاصله نسبتاً کوتاه جمع شود / منبسط شود تا پسکشی / امتداد را انجام دهد.
فلپ ها و نوارها نیز پیچیده هستند، نه تنها باید چیزی را حول یک محور بچرخانید، بلکه باید آن را نیز ترجمه کنید، شکاف های دیده شده را ایجاد کنید، و آن را به طور مرتب در حجم کم بسته بندی کنید.
اگر این هدف اساسی اکنون روشن است، گام بعدی این است که بیشتر بخوانید و مدلها بسازید و/یا با نرمافزار شبیهسازی سینماتیک بازی کنید. سعی کنید همان مکانیزم را با یک لینک بسازید و سپس سعی کنید مشکلاتی را که با آن مواجه هستید حل کنید.

-
rohamavation
نام: roham hesami radرهام حسامی راد
محل اقامت: 100 مایلی شمال لندن جاده آیلستون، لستر، لسترشر. LE2
عضویت : سهشنبه ۱۳۹۹/۸/۲۰ - ۰۸:۳۴
پست: 3286-
سپاس: 5494
- جنسیت:
تماس:
Re: هوافضا
چگونه لوله ها / شیلنگ های مختلف موتور هواپیما را شناسایی کنیم؟
وقتی به موتور هواپیما نگاه می کنید (بدون هیچ گونه پوششی) آیا راه آسانی برای تشخیص اینکه چه لوله هایی برای سوخت، هوا، روغن، هیدرولیک و غیره هستند وجود داره شاید قطر لوله های سیال خاصی با اندازه های مختلف باشد یا فقط باید سیستم موتور و اجزایی که ارائه می دهند را بشناسید تا بتوانید تشخیص دهید؟
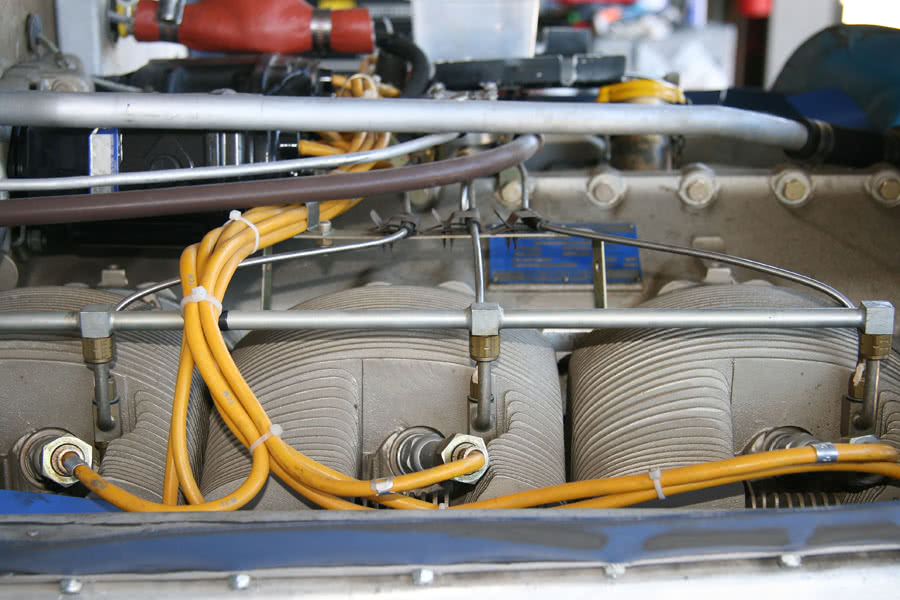
Piper Arrow شش سیلندر قاره ای
بیایید با موارد ساده برای شناسایی شروع کنیم. شما باید بتوانید به راحتی لوله اگزوز را پیدا کنید. در تصویر پیکان توجه کنید که لوله های نارنجی بزرگ زیادی وجود دارد. این لوله اسکات نامیده می شود و برای حرکت هوا در محفظه موتور استفاده می شود. در اکثر مجردها یک کفن در اطراف صدا خفه کن وجود دارد که شیلنگ های نارنجی رنگی از آن خارج می شود. آنهایی که وارد فایروال می شوند گرمای کابین و یخ زدایی را تامین می کنند. آنهایی که به کاربراتور می روند گرمای کربوهیدرات را برای جلوگیری از یخ زدگی فراهم می کنند.
به لوله های زنگ زده ای که از پایین موتور خارج می شوند توجه کنید. اینها لوله های اگزوز هستند و دیدن آن در این تصویر سخت است، اما آنها به صدا خفه کن متصل می شوند. لوله مشکی بزرگ بالای موتور به فیلتر هوا متصل است و ورودی هوا است. لوله های تمیز در امتداد بالای موتور، لوله های ورودی هوا هستند. بیشتر موتورهای تزریق سوخت دارای ورودی هوا در بالای موتور هستند.
موتورهای تزریق سوخت نیز دارای خطوط کوچکی هستند که سوخت را مستقیماً در هر سیلندر قرار می دهند. خط ورودی به "عنکبوت" در بالا یک خط سوخت است و می توانید آن را به پمپ بنزین ردیابی کنید.
تزریق سوخت
شیلنگ قهوه ای در تصویر زیر که به سمت عنکبوت می رود یک خط سوخت است.
خط سوخت
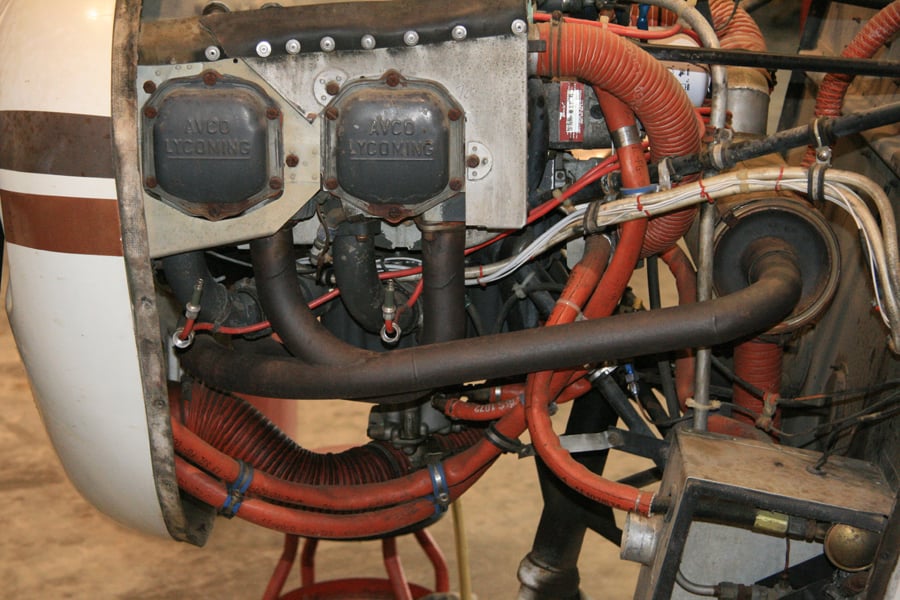
موتور چروکی
این را با موتور کاربراتوری در چروکی مقایسه کنید. هر چه لوله های زنگ زده بیشتر اگزوز هستند و لوله های آبی تمیزتر از کاربراتور با هوا و سوخت می آیند.
اگر بتوانید پمپ خلاء (مورد تیره سمت راست فیلتر روغن با نوارهای قرمز) را پیدا کنید، می توانید شلنگی را که به نشانگر وضعیت و نشانگر سمت راست می رود، شناسایی کنید. معمولاً یک فیلتر به شیلنگ ها و یک خط منتهی به گیج خلاء متصل است - اگرچه گاهی اوقات این فیلتر در داخل کابین است. شلنگ بزرگ با انتهای باز اگزوز پمپ است.
پمپ خلاء
در اینجا چهار سیلندر دیگر وجود دارد که می توانید ورودی و اگزوز را ببینید. به خطوط نقره ای با اتصالات آبی توجه کنید. این خطوط پرایمر هستند. در پایین سمت چپ یک خنک کننده روغن قرار دارد. یک لوله اسکات وجود دارد که هوا را به کولر می آورد و دو خط به داخل و خارج می شود.
موتور چهار سیلندر
کولرهای روغنی مانند این اغلب در جلوی کاسه قرار دارند. اگر خطوطی به چیزی که شبیه این است وصل شده باشد، خطوط نفت هستند.
کولر روغن
این یک روش متفاوت برای گرم کردن کربوهیدرات لوله کشی است. هوای داغ به جای خارج شدن از صدا خفه کن مستقیماً از موتور می آید.
گرمای کربوهیدرات
شیلنگ چروکی
دو شیلنگ کوچک در پایین تصویر به کولر روغن وصل شده است. اگر آنها را دنبال کنید، پمپ روغن را پیدا خواهید کرد.
کاربراتوری را میبینید که یک لوله اسکات از فیلتر هوا بیرون میآید و یکی در قسمت پشتی که از پوشش صدا خفهکن میآید. دو شیلنگ کوچکی که وارد کربوهیدرات می شوند خطوط سوخت هستند.
لوله نقرهای عمودی که از بالای تصویر، به سمت پایین از صدا خفهکن میرود و از پایین، خط تنفسی میل لنگ است.
جعبه در گوشه سمت راست پایین دارای پمپ سوخت الکتریکی (بوست پمپ) است. خطی که از آن خارج می شود یک خط سوخت است. لوله نقره ای داخل جعبه به دستگاه گازسوز می رود.
شما همچنین باید یک خط نفت را ببینید که از فایروال عبور می کند که فشار روغن را اندازه گیری می کند و یکی برای فشار سوخت، اما من عکسی نگرفتم از کارگاه که آنها را نشون بدم
لوله های هوا همیشه قطری بسیار بزرگتر از هر چیز دیگری دارند. اما فراتر از آن من هیچ قانون کلی نمی دانم. خطوط سوخت نفت و هیدرولیک می توانند بسیار شبیه به هم باشند. اگر آن را به یک موتور خاص محدود کنید (مثلاً یک cfm56-7)، ممکن است کسی بتواند اکتشافی ارائه دهد. اما فقط موتورها به طور کلی بسیار گسترده است.
در هواپیماهای GA معمولاً شیلنگ بافته شده مشکی ساخته شده به MIL-H-8794 (فشار انفجاری چند هزار PSI) را می بینید که برای هر چیزی که مایعات را تحت فشار قابل توجهی حمل می کند (روغن موتور، سوخت، خطوط ترمز و خنک کننده در موتور با خنک کننده مایع) استفاده می شود. ). متداولترین آنها Aeroquip 303 و Stratoflex 111 هستند که بافت سطح بیرونی آن از پارچه بافتهشده سیاه رنگ است (که مدل شلنگ در امتداد آن به رنگ زرد یا سفید چاپ شده است).
انواع شیلنگ لاستیکی فشار قوی با یک لایه بافته ضد زنگ اضافی در خارج (Stratoflex 156 و Aeroquip 601) و همچنین ضد زنگ بافته شده روی شلنگ داخلی تفلون (Stratoflex 124 و Aeroquip 666) وجود دارد.
در هواپیماهای حمل و نقل و شاید در برخی از هواپیماهای GA وجود دارد
نوار شناسایی چاپی چسبناکی خواهد بود که روی آن FUEL، OIL و غیره نوشته شده است. در غیر این صورت، باید از اجزایی که شیلنگ به آنها می رود (مثل شلنگی که به سمت فیلتر روغن یا خنک کننده می رود) بروید.
به عنوان یک قانون کلی در هواپیماهای سبک، شلنگ هایی که نسبتاً ضخیم هستند، ضخامت 3/4 تا 1 اینچ در محفظه موتور احتمالاً روغن موتور هستند و شلنگ های کوچکتر مثلاً 1/2 یا 5/8 اینچ، سوخت یا ترمز هستند.
فراتر از آن، اگر شیلنگ لاستیکی مشکی بافت صافی داشته باشد، شلنگ کم فشاری است که برای خطوط هواکش یا خطوط پمپ خلاء ابزاری مانند Aeroquip 306 استفاده میشود.
بنابراین به طور خلاصه، در هواپیماهای سبک:
شیلنگ چاقتر تا 1 اینچ با بافت بیرونی بافته شده، سیاه یا فولادی ضد زنگ، معمولاً روغن موتور یا خنککننده است اگر موتور از آن استفاده کند.
شلنگ نازکتر، مثلاً تا 5/8 اینچ با بافت خارجی بافته شده، سیاه یا فولادی ضد زنگ، معمولاً سوخت یا هیدرولیک (ترمز).
شلنگ سیاه چاقتر با بافت بیرونی صاف معمولاً چیزی با هوای کم فشار مانند دریچه میل لنگ است.
شلنگ سیاه نازکتر با بافت بیرونی صاف معمولاً چیزی با هوای کم فشار یا مکش مانند یک خط خلاء که از پمپ خلاء به دیوار آتش میرود، یا یک خط فشار منیفولد که از موتور به دیوار آتش میرود، میشود.
یکی از مشکلات این است که در خطوط سوخت، روغن و هیدرولیک زیر پوشش، شیلنگها معمولاً امروزه با پوشش محافظ پوشانده میشوند که زیر آن را پنهان میکند، بنابراین اغلب شما بدون توجه به آنچه در انتهای آن قرار دارد، در انتها گیر میکنید.
Cessna 172 182 Piper



اینم کاربراتورش


پمپ سوخت هواپیما:
پمپ سوخت هواپیما جزء مختص به سیستم سوخت هواپیما است. از این رو، اجازه دهید ابتدا یاد بگیریم که سیستم سوخت هواپیما چیست.
سیستم سوخت هواپیما چیست؟ | طراحی سیستم سوخت هواپیما
خدمه می توانند از سیستم سوخت هواپیما برای پمپاژ، مدیریت و رساندن سوخت هواپیما به واحدهای نیروی محرکه و کمکی هواپیما (APU) استفاده کنند.
سوخت aircrfat
سوخت از طریق خطوط سوخت (معمولاً به عنوان انتخابگر سوخت شناخته می شود) به شیر کنترل سوخت تحویل داده می شود. این شیر دارای عملکردهای مختلفی است. اولین مورد این است که به عنوان یک شیر خاموش کننده بنزین عمل می کند. خلبان می تواند انتخاب کند که کدام مخزن موتور را در عملکرد دوم تغذیه می کند.
عملکرد خاموش کردن یک سوپاپ جداگانه است که بعد از دریچه انتخاب سوخت در برخی از هواپیماها قرار دارد. گازکولاتور فیلتر سوختی است که ممکن است روی زمین باز شود و از آلایندههای بنزین سنگینتر از نفت، عمدتاً آب و گل و لای، به دنبال سوپاپ انتخاب - که در موقعیت پایینی در جریان سوخت قرار دارد، تخلیه شود.
صرف نظر از شرایط عملیاتی هواپیما، هر سیستم سوخت هواپیما باید سوخت تمیز را با فشار و نرخ جریانی که بتواند عملیات را حفظ کند، ذخیره و توزیع کند. با توجه به اندازه نسبی و پیچیدگی هواپیماهایی که در آن نصب می شوند، سیستم های سوخت به طور قابل توجهی از یک هواپیما به هواپیمای دیگر متفاوت است.
یک سیستم سوخت شامل یک مخزن بنزین تغذیه گرانشی و خط سوختی است که آن را در ابتدایی ترین شکل به موتور هواپیما متصل می کند. سیستم سوخت در یک هواپیمای مسافربری یا باری امروزی، چند موتوره، احتمالاً از مخازن سوخت بسیاری تشکیل شده است که در بال، بدنه (یا هر دو) و در برخی شرایط، در بال قرار دارند. پمپهای سوخت داخلی و سوپاپها و لولههای همراه در هر مخزن برای تغذیه موتورها، امکان سوختگیری و سوختگیری، جداسازی مخازن مختلف، و در برخی موارد امکان تخلیه سوخت یا بهینهسازی مرکز ثقل هواپیما را فراهم میکنند، نصب خواهند شد.
کاربرد پمپ سوخت در هواپیما چیست؟
که نصب پمپ سوخت هواپیما فقط تا حدی مشکل تحویل سوخت به موتور بدون کمک گرانش را حل کند. گرانش در برابر خرابی غیر قابل نفوذ است، اما پمپ های سوخت هواپیما غیرقابل نفوذ هستند. در نتیجه، باید یک نوع پمپ پشتیبان اضافه کنید تا از خود در برابر این احتمال محافظت کنید.
شما اکنون دو پمپ دارید، اما چگونه متوجه می شوید که آنها به درستی کار می کنند؟ برای به دست آوردن این اطلاعات، باید یک فشارسنج سوخت یا یک دبی سنج (که در اصل همان فشار سنج بنزین است) نصب کنید. همین است - فقط اندکی از پیچیدگی اضافی که یک سیستم پمپ سوخت اولیه هواپیما را از یک سیستم بنزین جریان گرانشی متمایز می کند.
سیستم پمپ سوخت هواپیما | پمپ بنزین هواپیما چگونه کار می کند؟
سیستم پمپ بنزین از هر نظر کاملاً شبیه سیستم جریان گرانشی است. مخازن سوخت نقطه شروع هر دو سیستم هستند. توزیع سوخت زمانی شروع می شود که سوخت از یک خروجی پوشیده شده با صفحه انگشت در پایین مخزن سوخت عبور کند. سوخت از طریق یک خط آلومینیومی (قطر حداقل 3/8 اینچ) از مخزن به یک سوپاپ مناسب انتخاب سوخت در کابین خلبان جریان می یابد.
بنزین پس از عبور از شیر انتخاب کننده مخزن به فیلتر اولیه فرستاده می شود که به آن "گاسکولاتور" نیز می گویند که قبلاً در مورد آن صحبت کردیم. گازکولر معمولاً روی دیوار آتش یافت می شود و باید پایین ترین جزء سیستم سوخت باشد. همیشه مجهز به یک دریچه تخلیه سریع است که به کل سیستم سوخت اجازه می دهد یکباره تخلیه شود.
در طول معاینه قبل از پرواز، گازکولر همچنین اجازه تخلیه مقداری سوخت را برای بررسی وجود آب می دهد. بدون برداشتن هیچ پوشش یا پوششی، تخلیه سریع باید بلافاصله در دسترس باشد. پس از عبور از گازکولر، سوخت فیلتر شده وارد یک پمپ پشتیبان می شود یا از آن عبور می کند. به طور معمول، این یک پمپ الکتریکی است، اگرچه ممکن است یک پمپ دستی نیز باشد.
در نهایت، سوخت به پمپ موتور محرکه می رسد که قلب سیستم پمپ سوخت است. این پمپ مکانیکی موتور محور مستقیماً به یک لنت کمکی روی میل لنگ موتور بسته می شود و از آنجا سوخت را تحت فشار به انژکتور یا کاربراتور سوخت می رساند. اگرچه پمپ موتور محرک منبع فشار سوخت اولیه است، هواپیماهایی که تحت یک گواهی نوع تایید شده تولید می شوند باید یک پمپ سوخت کمکی پشتیبان نصب کنند.
از آنجایی که این پمپ های بنزین باید فشار کافی برای انتقال سوخت از مخازن به کاربراتور یا انژکتور سوخت را فراهم کنند، باید راهی برای تعیین اینکه آیا فشار مناسب تولید می شود یا خیر. این مشکل جزئی با نصب یک فشارسنج سوخت حل می شود.
نصب گیج فشار سوخت
آیا موتورهای جت واقعاً به پمپ های سوخت با فشار بالا نیاز دارند و اگر چنین است چه مقدار فشار نیاز دارند؟
گیج فشار سوختی که قرار است نصب شود باید طوری کالیبره شود تا با محدوده فشار سوخت سیستم مطابقت داشته باشد. برای مثال، یک انژکتور سوخت، به فشار سوخت استاندارد حدود 24 psi نیاز دارد، در حالی که یک کاربراتور نوع فشار بیش از 15 psi نیاز ندارد. از سوی دیگر، فشار سنج سوختی که قادر به گزارش فشارهای بسیار بیشتر از فشارهای مورد نیاز برای نصب است، ممکن است به اندازه گیج فشار سوخت کالیبره شده برای محدوده فشار سوخت کوچکتر دقیق نباشد.
یک چیز دیگر برای فکر کردن وجود دارد. گیج های فشار سوخت مجزا معمولاً 2-1/4 اینچ یا 2-1/16 اینچ قطر دارند (نوع خودرو). به عنوان بخشی از "خوشه ابزار"، فشار سنج سوخت نیز موجود است. اینها بسیار رایج هستند و بیشتر سازندگان هواپیما از آنها استفاده می کنند.
پس از نصب گیج در پانل ابزار یا مکانی قابل دسترسی تر، در صورت لزوم، یک لوله آلومینیومی با اتصالات استاندارد AN آن را به کاربراتور یا انژکتور سوخت متصل می کند. در نتیجه، یک خط آلومینیومی 14 اینچی یا حتی 3/16 اینچی باید کار کند. خط فشار سوخت را با استفاده از اتصالات سبک محدود کننده به پورت موجود در محفظه انژکتور یا کاربراتور خود وصل کنید. خط فشار سوخت در محفظه موتور باید یک شلنگ انعطاف پذیر هواپیما باشد که با اتصالات فلزی معمولی ساخته شده است، به جای یک خط آلومینیومی از فشار سنج سوخت تا اتصالات دیوار آتش.
پمپ سوخت موتور هواپیما | پمپ سوخت مکانیکی هواپیما
در طول کارکرد منظم موتور، پمپ سوخت هواپیما (مکانیکی) به طور خودکار مقدار صحیح سوخت را به انژکتور یا کاربراتور سوخت نزدیک توزیع می کند. پمپ سوخت هوانوردی از نوع دیافراگم AC معروف به عنوان استاندارد صنعتی برای اکثر موتورهای هواپیماهای کوچک در نظر گرفته می شود. این یک پمپ خود پراینگ با دیافراگم های خاص است
هنگامی که پمپ سوخت موتور-محرک مناسب نصب می شود، باید بتواند حداقل جریان سوخت 125٪ از آنچه را که برای حداکثر قدرت برخاستن لازم است ارائه دهد. این ظرفیت مازاد مشکلی ایجاد نخواهد کرد زیرا یک شیر تسکین داخلی از ایجاد فشار بیش از حد سوخت جلوگیری می کند. شیر تسکین داخلی در کارخانه کالیبره شده است تا سوخت را در فشار ورودی سوخت صحیح برای یک کاربراتور یا نصب انژکتور سوخت تامین کند.
پمپهای سوخت موتوری دارای سابقه فوقالعادهای از قابلیت اطمینان هستند، اگرچه از کار میافتند. دیافراگم معمولاً پاره می شود و باعث می شود سوخت از خط تخلیه خارج شود. اگر چنین شکستی رخ دهد، معمولاً به دلیل کهولت سن است تا کمبود منابع. اگر دیافراگم پاره شود و دریچه به خطی که از لولههای اگزوز داغ به یک منطقه امن در دریا هدایت میشود وصل نشود، خرابی پمپ سوخت موتوری ممکن است خطر آتشسوزی قابلتوجهی ایجاد کند. علاوه بر این، موتور بدون کمک یک پمپ سوخت پشتیبان روشن نمی شود.
حتی اگر پمپ اصلی موتور از کار بیفتد، یک پمپ کمکی می تواند دستگاه شما را به کار نگه دارد. این امکان پذیر است زیرا پمپ های سوخت موتوری نوع AC دارای یک شیر بای پس داخلی هستند که به سوخت اجازه می دهد حتی پس از از کار افتادن پمپ از طریق پمپ عبور کند.
پمپ سوخت کمکی هواپیما | بوستر پمپ در سیستم سوخت هواپیما | پمپ سوخت الکتریکی هواپیما
پمپ کمکی، بوستر پمپ، پمپ الکتریکی، یا حتی پمپ تکان دهنده یک نسخه پشتیبان با هر نام دیگری است. همه آنها هدف یکسانی دارند: کمک به پمپ موتوری یا در موارد شدید، تعویض کامل آن. یک موتور الکتریکی مستقل، پمپ سوخت کمکی را تامین می کند -
هدف از پمپ تقویت کننده در سیستم سوخت هواپیما
پمپ های کمکی یا تقویت کننده را می توان برای اهداف مختلفی استفاده کرد، از جمله:
در استفاده از پرایمینگ موتور تزریق سوخت قبل از راه اندازی استفاده می شود.
هر زمان که پمپ موتوری از کار بیفتد یا نتواند جریان سوخت کافی را حفظ کند، برای بازگرداندن سوخت به موتور استفاده می شود.
از آن برای مبارزه با تشکیل بخار، به ویژه در ارتفاعات بیش از 10,000 پا استفاده می شود.
کمک به راه اندازی مجدد موتور زمانی که خلبان جت شما اجازه می دهد یکی از مخازن سوخت شما خشک شود.
استفاده از بوست پمپ در هنگام برخاستن و فرود به عنوان یک اقدام احتیاطی.
در صورت نصب، پمپ پشتیبان معمولاً به صورت سری به پمپ موتور محور متصل می شود. بوست پمپ باید دارای یک شیر بای پس داخلی باشد تا بنزین روشن باشد یا نباشد از آن عبور کند تا به این ترتیب نصب شود. اگر یک بوست پمپ الکتریکی بدون دریچه بای پس داخلی به پمپ موتور محرکه متصل شود، هر بار که بوست پمپ خاموش می شود، تمام جریان سوخت به پمپ موتور محرکه مسدود می شود زیرا هیچ بنزینی نمی تواند از آن عبور کند مگر اینکه سوئیچ شود. بر.
دریچه های بای پس داخلی در الکتروپمپ های کوچک کم فشار که توسط سازندگان برای موتورهای مجهز به کاربراتور استفاده می شود، استاندارد نیستند. هنگامی که برای تقویت پمپ موتور محرک استفاده می شود، این پمپ ها باید به صورت سری به پمپ موتور متصل شوند. یک سیستم موازی علاوه بر این ممکن است به یک یا چند سوپاپ بازرسی یک طرفه، بسته به نوع نصب، نیاز داشته باشد تا اطمینان حاصل شود که سوخت فقط به سمت موتور جریان می یابد و در حین کار پمپ الکتریکی به باک باز نمی گردد. در هر صورت، استقرار یک سیستم موازی همیشه دشوارتر از یک سیستم درون خطی خواهد بود.
پمپ لرزان
خلبانان آکروباتیک ورزشی از پمپ تکان دهنده اصلی به عنوان پمپ سوخت هواپیمای پشتیبان استفاده می کنند.
انواع پمپ سوخت در هواپیما | چند نوع پمپ سوخت هواپیما وجود دارد؟
معمولاً 5 نوع مختلف پمپ سوخت هواپیما در هواپیما وجود دارد که عبارتند از: پمپ های سوخت دستی، پمپ های تقویت کننده گریز از مرکز، پمپ های اجکتوری، پمپ های الکتریکی ضربانی، و پمپ های سوخت پره ای. که همه آنها در زیر توضیح داده شده است:
پمپ های سوخت دستی
پمپ های سوخت دستی هواپیما در برخی از هواپیماهای قدیمی با موتورهای رفت و برگشتی نصب شده است. آنها برای تکمیل پمپ موتور محرک و انتقال سوخت از یک مخزن به مخزن دیگر استفاده می شوند. اینها اساساً پمپ های تکان دهنده هستند، پمپ های دو عملکردی هستند که با هر ضربه دسته پمپ سوخت را تأمین می کنند. آنها اساساً پمپهایی از نوع پرهای هستند که کانالهای حفرهای در مرکز دارند و به جای چرخش کامل پرهها، مانند پمپهای پرهای الکتریکی یا موتوری، امکان پمپاژ بنزین را به عقب و جلو میدهند.
در حالی که ساده و با کمترین فضای خطا، پمپ دستی نیاز به نصب خطوط سوخت از کابین خلبان به پمپ دارد، که خطری را ایجاد می کند که با استفاده از پمپ برقی می توان از آن جلوگیری کرد. هواپیماهای مدرن با موتورهای رفت و برگشتی سبک معمولاً دارای پمپ های کمکی الکتریکی هستند. با این حال، برای پرایمینگ موتور(های) در هنگام راه اندازی، اغلب از پمپ دستی استفاده می کنند. هنگامی که دستگیره پرایمینگ به عقب کشیده می شود، این دستگاه های ساده پمپ های پیستونی تک اثره هستند که سوخت را به داخل سیلندر پمپ می مکند. هنگامی که اهرم به جلو فشار داده می شود، سوخت از طریق خطوط به سیلندرهای موتور پمپ می شود.
بوست پمپ های گریز از مرکز
پمپ گریز از مرکز رایج ترین نوع پمپ سوخت کمکی است که در هواپیماها، هواپیماهای عظیم و با کارایی بالا یافت می شود. این موتور توسط یک موتور الکتریکی تغذیه می شود و معمولاً در باک بنزین یا کمی خارج از کف باک غوطه ور می شود و ورودی پمپ به داخل باک امتداد می یابد. اگر پمپ در خارج از مخزن قرار گرفته باشد، معمولاً دریچه حذف پمپ نصب می شود که به پمپ اجازه می دهد بدون تخلیه مخزن بنزین خارج شود.
پمپ جابجایی متغیر یک بوست پمپ گریز از مرکز است. همانطور که پروانه می چرخد، سوخت را در مرکز می گیرد و آن را به بیرون می راند. یک شیر چک در خروجی از بازگشت سوخت به پمپ جلوگیری می کند. خروجی پمپ به لوله تغذیه سوخت متصل است. اگر بوست پمپ کار نمی کند، می توان یک شیر بای پس را در سیستم تغذیه سوخت قرار داد تا به پمپ موتور محرک اجازه دهد سوخت را از باک بیرون بکشد.
بسته به فاز عملکرد هواپیما، برخی از پمپ های سوخت گریز از مرکز با سرعت های متعددی کار می کنند که توسط خلبان تنظیم شده است. پمپ های سوخت تنها با یک سرعت نیز رایج هستند. صرف نظر از دما، ارتفاع یا وضعیت پرواز، پمپ های سوخت گریز از مرکز در مخازن سوخت، فشار مثبت را در سراسر سیستم سوخت حفظ می کنند و قفل بخار را از بین می برند.
از آنجای که موتور الکتریکی در سوخت غوطه ور است، پمپ های مستغرق دارای پوشش های ضد سوخت هستند. پمپ های گریز از مرکز که در خارج از مخزن قرار می گیرند به این نیاز ندارند، اما به نوعی از ورودی در سوخت نیاز دارند. این می تواند یک لوله با یک شیر خاموش کننده باشد که به پمپ اجازه می دهد بدون خالی کردن مخزن تعویض شود. یک صفحه نمایش ورودی هر دو نوع پمپ گریز از مرکز را می پوشاند تا از بلعیده شدن زباله های خارجی جلوگیری کند.
پمپ های اجکتوری
مخازن سوخت با پمپ های سوخت داخل باک، مانند پمپ های گریز از مرکز، به گونه ای طراحی شده اند که منبع سوخت ثابتی را در ورودی پمپ حفظ کنند. این کار از غارنوردی پمپ جلوگیری می کند و تضمین می کند که سوخت آن را خنک می کند. بافل ها، از جمله سوپاپ های برگشتی، همچنین به عنوان شیرهای فلپر نیز شناخته می شوند، می توانند برای تقسیم بخشی از مخزن بنزین که برای نصب پمپ تعیین شده است، استفاده شوند. این اجازه می دهد تا بنزین در حین انجام مانورها به داخل پمپ جریان یابد، اما نمی تواند به بیرون جریان یابد.
پمپ های اجکتوری در برخی از هواپیماها استفاده می شود تا اطمینان حاصل شود که سوخت مایع همیشه در ورودی پمپ وجود دارد. جریان خروجی پمپ به منطقه مخزن بازگردانده می شود، جایی که پمپ از طریق یک لوله با قطر کوچک قرار می گیرد. یک ونتوری، که بخشی از اجکتور است، سوخت را هدایت می کند. فشار کم هنگام عبور سوخت از ونتوری ایجاد می شود.
سوخت را می توان به مجموعه اجکتور مکیده و از طریق یک ورودی یا خطی که خارج از منطقه پمپ مخزن شروع می شود، به قسمت مخزن پمپ بنزین پمپ کرد. در ارتباط با سوپاپ های بازدارنده، پمپ های اجکتوری هد مثبت سوخت را در ورودی پمپ حفظ می کنند.
پمپ های الکتریکی ضربان دار
پمپ های سوخت کمکی کوچکتر و ارزانتر اغلب در هواپیماهای هوانوردی عمومی استفاده می شود. پمپ برقی پالسی که اغلب به عنوان پمپ بنزین از نوع پیستونی شناخته می شود، به طور گسترده استفاده می شود. در هواپیماهای بزرگتر، معمولاً مانند پمپ سوخت گریز از مرکز از آن استفاده می شود، با این تفاوت که در پایین دست خروجی های مخزن سوخت قرار می گیرد.
پمپ سوخت موتوری به موازات پمپ بنزین الکتریکی ضربان دار هدایت می شود. قبل از اینکه پمپ بنزین موتوری در هنگام راهاندازی به سرعت برسد، سوخت را تامین میکند و همچنین میتواند به عنوان پشتیبان در هنگام برخاستن از آن استفاده شود. همچنین می توان از آن برای جلوگیری از قفل شدن بخار در ارتفاعات استفاده کرد. یک پیستون سوخت را به داخل پمپ الکتریکی ضربان دار می کشد و بنزین را از آن بیرون می راند. پیستون در یک حرکت ضربانی توسط یک شیر برقی که به طور متناوب بین برق دار شدن و قطع شدن انرژی حرکت می کند، به جلو و عقب حرکت می کند.
فشار سوخت در خروجی پمپ، پمپ بنزین الکتریکی پالسی تک اثره را کنترل می کند. هنگامی که به بنزین نیاز است، پمپ با فشار کم در خروجی پمپ به سرعت چرخش می کند. پمپ با افزایش فشار سوخت کند می شود زیرا فنر کالیبره شده در حالی که سعی می کند پیستون را به سمت بالا به حرکت درآورد با مقاومت روبرو می شود. حرکت پیستون توسط یک فنر در مرکز کاهش می یابد.
پمپ های سوخت پره ای
رایج ترین انواع پمپ های سوخت که در هواپیماهای با موتور رفت و برگشتی دیده می شود، پمپ های سوخت پره ای هستند. می توان از آنها به عنوان پمپ بنزین اولیه و همچنین پمپ های کمکی یا بوست استفاده کرد. از طرف دیگر، پمپ پره ای، یک پمپ جابجایی ثابت است که با هر دور چرخش پمپ، حجم مداومی از سوخت را منتقل می کند. یک موتور الکتریکی شفت پمپ را هنگامی که به عنوان پمپ کمکی استفاده می شود می چرخاند. گیربکس کمکی اغلب پمپ پره ای را در سیستم های موتوری کار می کند.
پمپ سوخت هواپیما: نوع پره دوار.
یک روتور خارج از مرکز در داخل یک سیلندر رانده می شود، همانطور که در مورد تمام پمپ های پره ای وجود دارد. پرهها به داخل و خارج از شکافهای روتور میلغزند که توسط یک پین فاصلهگیر مرکزی در مقابل دیواره سیلندر قرار میگیرند. شکاف حجمی ایجاد شده توسط دیواره سیلندر، روتور و پره ها افزایش می یابد و سپس با چرخش پره ها به دور روتور خارج از مرکز کاهش می یابد.
بنزین از طریق یک درگاه ورودی که پره ها فضای افزایشی حجم تولید می کنند به پمپ وارد می شود. فضای تولید شده با پیشرفت چرخش کوچکتر می شود. سوخت توسط یک درگاه خروجی که در آنجا قرار دارد از سیلندر خارج می شود. مکانیسم اندازهگیری سوخت موتور، بنزین بیشتری از آنچه برای کار کردن نیاز دارد، تامین میکند. از طرف دیگر، حجم ثابت پمپ پره ای می تواند بیش از حد باشد.
اکثر پمپ های پره ای دارای ویژگی کاهش فشار هستند که ممکن است برای تنظیم جریان تنظیم شود. با استفاده از فشاری که در خروجی پمپ ایجاد میشود، یک سوپاپ را از روی صندلی آن بیرون میکشد و اجازه میدهد بنزین اضافی به سمت ورودی پمپ برگردد. حجم صحیح سوخت با قرار دادن ریل در فشاری بالاتر از فشار هوای ورودی دستگاه اندازه گیری سوخت موتور به دست می آید.
هنگام روشن شدن موتور یا اگر پمپ پره ای کار نمی کند، سوخت باید از طریق پمپ به دستگاه اندازه گیری سوخت جریان یابد. برای انجام این کار از یک شیر بای پس در داخل پمپ استفاده می شود. هنگامی که فشار سوخت ورودی پمپ بیشتر از فشار سوخت خروجی است، یک صفحه ضعیف فنر شده در زیر شیر تخلیه بر فشار فنر غلبه می کند.
هنگامی که پمپ پره ای پمپ سوخت اولیه موتور محور است، از پمپ های سوخت پره ای جبرانی استفاده می شود. همانطور که فشار هوای ورودی دستگاه اندازه گیری سوخت به دلیل ارتفاع یا فشار خروجی توربوشارژر تغییر می کند، تنظیم سوپاپ تسکین به طور خودکار تعدیل می شود تا تحویل صحیح سوخت را ارائه دهد. منبع فشار هوای ورودی به یک محفظه دریچه بالای دیافراگم متصل به مکانیسم تسکین متصل است. هنگامی که فشار هوا تغییر می کند، دیافراگم به فشار فنر سوپاپ کمک می کند یا مقاومت می کند و در نتیجه سوخت مناسب برای شرایط فعلی در دستگاه اندازه گیری سوخت را تحویل می دهد.
وقتی به موتور هواپیما نگاه می کنید (بدون هیچ گونه پوششی) آیا راه آسانی برای تشخیص اینکه چه لوله هایی برای سوخت، هوا، روغن، هیدرولیک و غیره هستند وجود داره شاید قطر لوله های سیال خاصی با اندازه های مختلف باشد یا فقط باید سیستم موتور و اجزایی که ارائه می دهند را بشناسید تا بتوانید تشخیص دهید؟
Piper Arrow شش سیلندر قاره ای
بیایید با موارد ساده برای شناسایی شروع کنیم. شما باید بتوانید به راحتی لوله اگزوز را پیدا کنید. در تصویر پیکان توجه کنید که لوله های نارنجی بزرگ زیادی وجود دارد. این لوله اسکات نامیده می شود و برای حرکت هوا در محفظه موتور استفاده می شود. در اکثر مجردها یک کفن در اطراف صدا خفه کن وجود دارد که شیلنگ های نارنجی رنگی از آن خارج می شود. آنهایی که وارد فایروال می شوند گرمای کابین و یخ زدایی را تامین می کنند. آنهایی که به کاربراتور می روند گرمای کربوهیدرات را برای جلوگیری از یخ زدگی فراهم می کنند.
به لوله های زنگ زده ای که از پایین موتور خارج می شوند توجه کنید. اینها لوله های اگزوز هستند و دیدن آن در این تصویر سخت است، اما آنها به صدا خفه کن متصل می شوند. لوله مشکی بزرگ بالای موتور به فیلتر هوا متصل است و ورودی هوا است. لوله های تمیز در امتداد بالای موتور، لوله های ورودی هوا هستند. بیشتر موتورهای تزریق سوخت دارای ورودی هوا در بالای موتور هستند.
موتورهای تزریق سوخت نیز دارای خطوط کوچکی هستند که سوخت را مستقیماً در هر سیلندر قرار می دهند. خط ورودی به "عنکبوت" در بالا یک خط سوخت است و می توانید آن را به پمپ بنزین ردیابی کنید.
تزریق سوخت
شیلنگ قهوه ای در تصویر زیر که به سمت عنکبوت می رود یک خط سوخت است.
خط سوخت
موتور چروکی
این را با موتور کاربراتوری در چروکی مقایسه کنید. هر چه لوله های زنگ زده بیشتر اگزوز هستند و لوله های آبی تمیزتر از کاربراتور با هوا و سوخت می آیند.
اگر بتوانید پمپ خلاء (مورد تیره سمت راست فیلتر روغن با نوارهای قرمز) را پیدا کنید، می توانید شلنگی را که به نشانگر وضعیت و نشانگر سمت راست می رود، شناسایی کنید. معمولاً یک فیلتر به شیلنگ ها و یک خط منتهی به گیج خلاء متصل است - اگرچه گاهی اوقات این فیلتر در داخل کابین است. شلنگ بزرگ با انتهای باز اگزوز پمپ است.
پمپ خلاء
در اینجا چهار سیلندر دیگر وجود دارد که می توانید ورودی و اگزوز را ببینید. به خطوط نقره ای با اتصالات آبی توجه کنید. این خطوط پرایمر هستند. در پایین سمت چپ یک خنک کننده روغن قرار دارد. یک لوله اسکات وجود دارد که هوا را به کولر می آورد و دو خط به داخل و خارج می شود.
موتور چهار سیلندر
کولرهای روغنی مانند این اغلب در جلوی کاسه قرار دارند. اگر خطوطی به چیزی که شبیه این است وصل شده باشد، خطوط نفت هستند.
کولر روغن
این یک روش متفاوت برای گرم کردن کربوهیدرات لوله کشی است. هوای داغ به جای خارج شدن از صدا خفه کن مستقیماً از موتور می آید.
گرمای کربوهیدرات
شیلنگ چروکی
دو شیلنگ کوچک در پایین تصویر به کولر روغن وصل شده است. اگر آنها را دنبال کنید، پمپ روغن را پیدا خواهید کرد.
کاربراتوری را میبینید که یک لوله اسکات از فیلتر هوا بیرون میآید و یکی در قسمت پشتی که از پوشش صدا خفهکن میآید. دو شیلنگ کوچکی که وارد کربوهیدرات می شوند خطوط سوخت هستند.
لوله نقرهای عمودی که از بالای تصویر، به سمت پایین از صدا خفهکن میرود و از پایین، خط تنفسی میل لنگ است.
جعبه در گوشه سمت راست پایین دارای پمپ سوخت الکتریکی (بوست پمپ) است. خطی که از آن خارج می شود یک خط سوخت است. لوله نقره ای داخل جعبه به دستگاه گازسوز می رود.
شما همچنین باید یک خط نفت را ببینید که از فایروال عبور می کند که فشار روغن را اندازه گیری می کند و یکی برای فشار سوخت، اما من عکسی نگرفتم از کارگاه که آنها را نشون بدم
لوله های هوا همیشه قطری بسیار بزرگتر از هر چیز دیگری دارند. اما فراتر از آن من هیچ قانون کلی نمی دانم. خطوط سوخت نفت و هیدرولیک می توانند بسیار شبیه به هم باشند. اگر آن را به یک موتور خاص محدود کنید (مثلاً یک cfm56-7)، ممکن است کسی بتواند اکتشافی ارائه دهد. اما فقط موتورها به طور کلی بسیار گسترده است.
در هواپیماهای GA معمولاً شیلنگ بافته شده مشکی ساخته شده به MIL-H-8794 (فشار انفجاری چند هزار PSI) را می بینید که برای هر چیزی که مایعات را تحت فشار قابل توجهی حمل می کند (روغن موتور، سوخت، خطوط ترمز و خنک کننده در موتور با خنک کننده مایع) استفاده می شود. ). متداولترین آنها Aeroquip 303 و Stratoflex 111 هستند که بافت سطح بیرونی آن از پارچه بافتهشده سیاه رنگ است (که مدل شلنگ در امتداد آن به رنگ زرد یا سفید چاپ شده است).
انواع شیلنگ لاستیکی فشار قوی با یک لایه بافته ضد زنگ اضافی در خارج (Stratoflex 156 و Aeroquip 601) و همچنین ضد زنگ بافته شده روی شلنگ داخلی تفلون (Stratoflex 124 و Aeroquip 666) وجود دارد.
در هواپیماهای حمل و نقل و شاید در برخی از هواپیماهای GA وجود دارد
نوار شناسایی چاپی چسبناکی خواهد بود که روی آن FUEL، OIL و غیره نوشته شده است. در غیر این صورت، باید از اجزایی که شیلنگ به آنها می رود (مثل شلنگی که به سمت فیلتر روغن یا خنک کننده می رود) بروید.
به عنوان یک قانون کلی در هواپیماهای سبک، شلنگ هایی که نسبتاً ضخیم هستند، ضخامت 3/4 تا 1 اینچ در محفظه موتور احتمالاً روغن موتور هستند و شلنگ های کوچکتر مثلاً 1/2 یا 5/8 اینچ، سوخت یا ترمز هستند.
فراتر از آن، اگر شیلنگ لاستیکی مشکی بافت صافی داشته باشد، شلنگ کم فشاری است که برای خطوط هواکش یا خطوط پمپ خلاء ابزاری مانند Aeroquip 306 استفاده میشود.
بنابراین به طور خلاصه، در هواپیماهای سبک:
شیلنگ چاقتر تا 1 اینچ با بافت بیرونی بافته شده، سیاه یا فولادی ضد زنگ، معمولاً روغن موتور یا خنککننده است اگر موتور از آن استفاده کند.
شلنگ نازکتر، مثلاً تا 5/8 اینچ با بافت خارجی بافته شده، سیاه یا فولادی ضد زنگ، معمولاً سوخت یا هیدرولیک (ترمز).
شلنگ سیاه چاقتر با بافت بیرونی صاف معمولاً چیزی با هوای کم فشار مانند دریچه میل لنگ است.
شلنگ سیاه نازکتر با بافت بیرونی صاف معمولاً چیزی با هوای کم فشار یا مکش مانند یک خط خلاء که از پمپ خلاء به دیوار آتش میرود، یا یک خط فشار منیفولد که از موتور به دیوار آتش میرود، میشود.
یکی از مشکلات این است که در خطوط سوخت، روغن و هیدرولیک زیر پوشش، شیلنگها معمولاً امروزه با پوشش محافظ پوشانده میشوند که زیر آن را پنهان میکند، بنابراین اغلب شما بدون توجه به آنچه در انتهای آن قرار دارد، در انتها گیر میکنید.
Cessna 172 182 Piper
اینم کاربراتورش
پمپ سوخت هواپیما:
پمپ سوخت هواپیما جزء مختص به سیستم سوخت هواپیما است. از این رو، اجازه دهید ابتدا یاد بگیریم که سیستم سوخت هواپیما چیست.
سیستم سوخت هواپیما چیست؟ | طراحی سیستم سوخت هواپیما
خدمه می توانند از سیستم سوخت هواپیما برای پمپاژ، مدیریت و رساندن سوخت هواپیما به واحدهای نیروی محرکه و کمکی هواپیما (APU) استفاده کنند.
سوخت aircrfat
سوخت از طریق خطوط سوخت (معمولاً به عنوان انتخابگر سوخت شناخته می شود) به شیر کنترل سوخت تحویل داده می شود. این شیر دارای عملکردهای مختلفی است. اولین مورد این است که به عنوان یک شیر خاموش کننده بنزین عمل می کند. خلبان می تواند انتخاب کند که کدام مخزن موتور را در عملکرد دوم تغذیه می کند.
عملکرد خاموش کردن یک سوپاپ جداگانه است که بعد از دریچه انتخاب سوخت در برخی از هواپیماها قرار دارد. گازکولاتور فیلتر سوختی است که ممکن است روی زمین باز شود و از آلایندههای بنزین سنگینتر از نفت، عمدتاً آب و گل و لای، به دنبال سوپاپ انتخاب - که در موقعیت پایینی در جریان سوخت قرار دارد، تخلیه شود.
صرف نظر از شرایط عملیاتی هواپیما، هر سیستم سوخت هواپیما باید سوخت تمیز را با فشار و نرخ جریانی که بتواند عملیات را حفظ کند، ذخیره و توزیع کند. با توجه به اندازه نسبی و پیچیدگی هواپیماهایی که در آن نصب می شوند، سیستم های سوخت به طور قابل توجهی از یک هواپیما به هواپیمای دیگر متفاوت است.
یک سیستم سوخت شامل یک مخزن بنزین تغذیه گرانشی و خط سوختی است که آن را در ابتدایی ترین شکل به موتور هواپیما متصل می کند. سیستم سوخت در یک هواپیمای مسافربری یا باری امروزی، چند موتوره، احتمالاً از مخازن سوخت بسیاری تشکیل شده است که در بال، بدنه (یا هر دو) و در برخی شرایط، در بال قرار دارند. پمپهای سوخت داخلی و سوپاپها و لولههای همراه در هر مخزن برای تغذیه موتورها، امکان سوختگیری و سوختگیری، جداسازی مخازن مختلف، و در برخی موارد امکان تخلیه سوخت یا بهینهسازی مرکز ثقل هواپیما را فراهم میکنند، نصب خواهند شد.
کاربرد پمپ سوخت در هواپیما چیست؟
که نصب پمپ سوخت هواپیما فقط تا حدی مشکل تحویل سوخت به موتور بدون کمک گرانش را حل کند. گرانش در برابر خرابی غیر قابل نفوذ است، اما پمپ های سوخت هواپیما غیرقابل نفوذ هستند. در نتیجه، باید یک نوع پمپ پشتیبان اضافه کنید تا از خود در برابر این احتمال محافظت کنید.
شما اکنون دو پمپ دارید، اما چگونه متوجه می شوید که آنها به درستی کار می کنند؟ برای به دست آوردن این اطلاعات، باید یک فشارسنج سوخت یا یک دبی سنج (که در اصل همان فشار سنج بنزین است) نصب کنید. همین است - فقط اندکی از پیچیدگی اضافی که یک سیستم پمپ سوخت اولیه هواپیما را از یک سیستم بنزین جریان گرانشی متمایز می کند.
سیستم پمپ سوخت هواپیما | پمپ بنزین هواپیما چگونه کار می کند؟
سیستم پمپ بنزین از هر نظر کاملاً شبیه سیستم جریان گرانشی است. مخازن سوخت نقطه شروع هر دو سیستم هستند. توزیع سوخت زمانی شروع می شود که سوخت از یک خروجی پوشیده شده با صفحه انگشت در پایین مخزن سوخت عبور کند. سوخت از طریق یک خط آلومینیومی (قطر حداقل 3/8 اینچ) از مخزن به یک سوپاپ مناسب انتخاب سوخت در کابین خلبان جریان می یابد.
بنزین پس از عبور از شیر انتخاب کننده مخزن به فیلتر اولیه فرستاده می شود که به آن "گاسکولاتور" نیز می گویند که قبلاً در مورد آن صحبت کردیم. گازکولر معمولاً روی دیوار آتش یافت می شود و باید پایین ترین جزء سیستم سوخت باشد. همیشه مجهز به یک دریچه تخلیه سریع است که به کل سیستم سوخت اجازه می دهد یکباره تخلیه شود.
در طول معاینه قبل از پرواز، گازکولر همچنین اجازه تخلیه مقداری سوخت را برای بررسی وجود آب می دهد. بدون برداشتن هیچ پوشش یا پوششی، تخلیه سریع باید بلافاصله در دسترس باشد. پس از عبور از گازکولر، سوخت فیلتر شده وارد یک پمپ پشتیبان می شود یا از آن عبور می کند. به طور معمول، این یک پمپ الکتریکی است، اگرچه ممکن است یک پمپ دستی نیز باشد.
در نهایت، سوخت به پمپ موتور محرکه می رسد که قلب سیستم پمپ سوخت است. این پمپ مکانیکی موتور محور مستقیماً به یک لنت کمکی روی میل لنگ موتور بسته می شود و از آنجا سوخت را تحت فشار به انژکتور یا کاربراتور سوخت می رساند. اگرچه پمپ موتور محرک منبع فشار سوخت اولیه است، هواپیماهایی که تحت یک گواهی نوع تایید شده تولید می شوند باید یک پمپ سوخت کمکی پشتیبان نصب کنند.
از آنجایی که این پمپ های بنزین باید فشار کافی برای انتقال سوخت از مخازن به کاربراتور یا انژکتور سوخت را فراهم کنند، باید راهی برای تعیین اینکه آیا فشار مناسب تولید می شود یا خیر. این مشکل جزئی با نصب یک فشارسنج سوخت حل می شود.
نصب گیج فشار سوخت
آیا موتورهای جت واقعاً به پمپ های سوخت با فشار بالا نیاز دارند و اگر چنین است چه مقدار فشار نیاز دارند؟
گیج فشار سوختی که قرار است نصب شود باید طوری کالیبره شود تا با محدوده فشار سوخت سیستم مطابقت داشته باشد. برای مثال، یک انژکتور سوخت، به فشار سوخت استاندارد حدود 24 psi نیاز دارد، در حالی که یک کاربراتور نوع فشار بیش از 15 psi نیاز ندارد. از سوی دیگر، فشار سنج سوختی که قادر به گزارش فشارهای بسیار بیشتر از فشارهای مورد نیاز برای نصب است، ممکن است به اندازه گیج فشار سوخت کالیبره شده برای محدوده فشار سوخت کوچکتر دقیق نباشد.
یک چیز دیگر برای فکر کردن وجود دارد. گیج های فشار سوخت مجزا معمولاً 2-1/4 اینچ یا 2-1/16 اینچ قطر دارند (نوع خودرو). به عنوان بخشی از "خوشه ابزار"، فشار سنج سوخت نیز موجود است. اینها بسیار رایج هستند و بیشتر سازندگان هواپیما از آنها استفاده می کنند.
پس از نصب گیج در پانل ابزار یا مکانی قابل دسترسی تر، در صورت لزوم، یک لوله آلومینیومی با اتصالات استاندارد AN آن را به کاربراتور یا انژکتور سوخت متصل می کند. در نتیجه، یک خط آلومینیومی 14 اینچی یا حتی 3/16 اینچی باید کار کند. خط فشار سوخت را با استفاده از اتصالات سبک محدود کننده به پورت موجود در محفظه انژکتور یا کاربراتور خود وصل کنید. خط فشار سوخت در محفظه موتور باید یک شلنگ انعطاف پذیر هواپیما باشد که با اتصالات فلزی معمولی ساخته شده است، به جای یک خط آلومینیومی از فشار سنج سوخت تا اتصالات دیوار آتش.
پمپ سوخت موتور هواپیما | پمپ سوخت مکانیکی هواپیما
در طول کارکرد منظم موتور، پمپ سوخت هواپیما (مکانیکی) به طور خودکار مقدار صحیح سوخت را به انژکتور یا کاربراتور سوخت نزدیک توزیع می کند. پمپ سوخت هوانوردی از نوع دیافراگم AC معروف به عنوان استاندارد صنعتی برای اکثر موتورهای هواپیماهای کوچک در نظر گرفته می شود. این یک پمپ خود پراینگ با دیافراگم های خاص است
هنگامی که پمپ سوخت موتور-محرک مناسب نصب می شود، باید بتواند حداقل جریان سوخت 125٪ از آنچه را که برای حداکثر قدرت برخاستن لازم است ارائه دهد. این ظرفیت مازاد مشکلی ایجاد نخواهد کرد زیرا یک شیر تسکین داخلی از ایجاد فشار بیش از حد سوخت جلوگیری می کند. شیر تسکین داخلی در کارخانه کالیبره شده است تا سوخت را در فشار ورودی سوخت صحیح برای یک کاربراتور یا نصب انژکتور سوخت تامین کند.
پمپهای سوخت موتوری دارای سابقه فوقالعادهای از قابلیت اطمینان هستند، اگرچه از کار میافتند. دیافراگم معمولاً پاره می شود و باعث می شود سوخت از خط تخلیه خارج شود. اگر چنین شکستی رخ دهد، معمولاً به دلیل کهولت سن است تا کمبود منابع. اگر دیافراگم پاره شود و دریچه به خطی که از لولههای اگزوز داغ به یک منطقه امن در دریا هدایت میشود وصل نشود، خرابی پمپ سوخت موتوری ممکن است خطر آتشسوزی قابلتوجهی ایجاد کند. علاوه بر این، موتور بدون کمک یک پمپ سوخت پشتیبان روشن نمی شود.
حتی اگر پمپ اصلی موتور از کار بیفتد، یک پمپ کمکی می تواند دستگاه شما را به کار نگه دارد. این امکان پذیر است زیرا پمپ های سوخت موتوری نوع AC دارای یک شیر بای پس داخلی هستند که به سوخت اجازه می دهد حتی پس از از کار افتادن پمپ از طریق پمپ عبور کند.
پمپ سوخت کمکی هواپیما | بوستر پمپ در سیستم سوخت هواپیما | پمپ سوخت الکتریکی هواپیما
پمپ کمکی، بوستر پمپ، پمپ الکتریکی، یا حتی پمپ تکان دهنده یک نسخه پشتیبان با هر نام دیگری است. همه آنها هدف یکسانی دارند: کمک به پمپ موتوری یا در موارد شدید، تعویض کامل آن. یک موتور الکتریکی مستقل، پمپ سوخت کمکی را تامین می کند -
هدف از پمپ تقویت کننده در سیستم سوخت هواپیما
پمپ های کمکی یا تقویت کننده را می توان برای اهداف مختلفی استفاده کرد، از جمله:
در استفاده از پرایمینگ موتور تزریق سوخت قبل از راه اندازی استفاده می شود.
هر زمان که پمپ موتوری از کار بیفتد یا نتواند جریان سوخت کافی را حفظ کند، برای بازگرداندن سوخت به موتور استفاده می شود.
از آن برای مبارزه با تشکیل بخار، به ویژه در ارتفاعات بیش از 10,000 پا استفاده می شود.
کمک به راه اندازی مجدد موتور زمانی که خلبان جت شما اجازه می دهد یکی از مخازن سوخت شما خشک شود.
استفاده از بوست پمپ در هنگام برخاستن و فرود به عنوان یک اقدام احتیاطی.
در صورت نصب، پمپ پشتیبان معمولاً به صورت سری به پمپ موتور محور متصل می شود. بوست پمپ باید دارای یک شیر بای پس داخلی باشد تا بنزین روشن باشد یا نباشد از آن عبور کند تا به این ترتیب نصب شود. اگر یک بوست پمپ الکتریکی بدون دریچه بای پس داخلی به پمپ موتور محرکه متصل شود، هر بار که بوست پمپ خاموش می شود، تمام جریان سوخت به پمپ موتور محرکه مسدود می شود زیرا هیچ بنزینی نمی تواند از آن عبور کند مگر اینکه سوئیچ شود. بر.
دریچه های بای پس داخلی در الکتروپمپ های کوچک کم فشار که توسط سازندگان برای موتورهای مجهز به کاربراتور استفاده می شود، استاندارد نیستند. هنگامی که برای تقویت پمپ موتور محرک استفاده می شود، این پمپ ها باید به صورت سری به پمپ موتور متصل شوند. یک سیستم موازی علاوه بر این ممکن است به یک یا چند سوپاپ بازرسی یک طرفه، بسته به نوع نصب، نیاز داشته باشد تا اطمینان حاصل شود که سوخت فقط به سمت موتور جریان می یابد و در حین کار پمپ الکتریکی به باک باز نمی گردد. در هر صورت، استقرار یک سیستم موازی همیشه دشوارتر از یک سیستم درون خطی خواهد بود.
پمپ لرزان
خلبانان آکروباتیک ورزشی از پمپ تکان دهنده اصلی به عنوان پمپ سوخت هواپیمای پشتیبان استفاده می کنند.
انواع پمپ سوخت در هواپیما | چند نوع پمپ سوخت هواپیما وجود دارد؟
معمولاً 5 نوع مختلف پمپ سوخت هواپیما در هواپیما وجود دارد که عبارتند از: پمپ های سوخت دستی، پمپ های تقویت کننده گریز از مرکز، پمپ های اجکتوری، پمپ های الکتریکی ضربانی، و پمپ های سوخت پره ای. که همه آنها در زیر توضیح داده شده است:
پمپ های سوخت دستی
پمپ های سوخت دستی هواپیما در برخی از هواپیماهای قدیمی با موتورهای رفت و برگشتی نصب شده است. آنها برای تکمیل پمپ موتور محرک و انتقال سوخت از یک مخزن به مخزن دیگر استفاده می شوند. اینها اساساً پمپ های تکان دهنده هستند، پمپ های دو عملکردی هستند که با هر ضربه دسته پمپ سوخت را تأمین می کنند. آنها اساساً پمپهایی از نوع پرهای هستند که کانالهای حفرهای در مرکز دارند و به جای چرخش کامل پرهها، مانند پمپهای پرهای الکتریکی یا موتوری، امکان پمپاژ بنزین را به عقب و جلو میدهند.
در حالی که ساده و با کمترین فضای خطا، پمپ دستی نیاز به نصب خطوط سوخت از کابین خلبان به پمپ دارد، که خطری را ایجاد می کند که با استفاده از پمپ برقی می توان از آن جلوگیری کرد. هواپیماهای مدرن با موتورهای رفت و برگشتی سبک معمولاً دارای پمپ های کمکی الکتریکی هستند. با این حال، برای پرایمینگ موتور(های) در هنگام راه اندازی، اغلب از پمپ دستی استفاده می کنند. هنگامی که دستگیره پرایمینگ به عقب کشیده می شود، این دستگاه های ساده پمپ های پیستونی تک اثره هستند که سوخت را به داخل سیلندر پمپ می مکند. هنگامی که اهرم به جلو فشار داده می شود، سوخت از طریق خطوط به سیلندرهای موتور پمپ می شود.
بوست پمپ های گریز از مرکز
پمپ گریز از مرکز رایج ترین نوع پمپ سوخت کمکی است که در هواپیماها، هواپیماهای عظیم و با کارایی بالا یافت می شود. این موتور توسط یک موتور الکتریکی تغذیه می شود و معمولاً در باک بنزین یا کمی خارج از کف باک غوطه ور می شود و ورودی پمپ به داخل باک امتداد می یابد. اگر پمپ در خارج از مخزن قرار گرفته باشد، معمولاً دریچه حذف پمپ نصب می شود که به پمپ اجازه می دهد بدون تخلیه مخزن بنزین خارج شود.
پمپ جابجایی متغیر یک بوست پمپ گریز از مرکز است. همانطور که پروانه می چرخد، سوخت را در مرکز می گیرد و آن را به بیرون می راند. یک شیر چک در خروجی از بازگشت سوخت به پمپ جلوگیری می کند. خروجی پمپ به لوله تغذیه سوخت متصل است. اگر بوست پمپ کار نمی کند، می توان یک شیر بای پس را در سیستم تغذیه سوخت قرار داد تا به پمپ موتور محرک اجازه دهد سوخت را از باک بیرون بکشد.
بسته به فاز عملکرد هواپیما، برخی از پمپ های سوخت گریز از مرکز با سرعت های متعددی کار می کنند که توسط خلبان تنظیم شده است. پمپ های سوخت تنها با یک سرعت نیز رایج هستند. صرف نظر از دما، ارتفاع یا وضعیت پرواز، پمپ های سوخت گریز از مرکز در مخازن سوخت، فشار مثبت را در سراسر سیستم سوخت حفظ می کنند و قفل بخار را از بین می برند.
از آنجای که موتور الکتریکی در سوخت غوطه ور است، پمپ های مستغرق دارای پوشش های ضد سوخت هستند. پمپ های گریز از مرکز که در خارج از مخزن قرار می گیرند به این نیاز ندارند، اما به نوعی از ورودی در سوخت نیاز دارند. این می تواند یک لوله با یک شیر خاموش کننده باشد که به پمپ اجازه می دهد بدون خالی کردن مخزن تعویض شود. یک صفحه نمایش ورودی هر دو نوع پمپ گریز از مرکز را می پوشاند تا از بلعیده شدن زباله های خارجی جلوگیری کند.
پمپ های اجکتوری
مخازن سوخت با پمپ های سوخت داخل باک، مانند پمپ های گریز از مرکز، به گونه ای طراحی شده اند که منبع سوخت ثابتی را در ورودی پمپ حفظ کنند. این کار از غارنوردی پمپ جلوگیری می کند و تضمین می کند که سوخت آن را خنک می کند. بافل ها، از جمله سوپاپ های برگشتی، همچنین به عنوان شیرهای فلپر نیز شناخته می شوند، می توانند برای تقسیم بخشی از مخزن بنزین که برای نصب پمپ تعیین شده است، استفاده شوند. این اجازه می دهد تا بنزین در حین انجام مانورها به داخل پمپ جریان یابد، اما نمی تواند به بیرون جریان یابد.
پمپ های اجکتوری در برخی از هواپیماها استفاده می شود تا اطمینان حاصل شود که سوخت مایع همیشه در ورودی پمپ وجود دارد. جریان خروجی پمپ به منطقه مخزن بازگردانده می شود، جایی که پمپ از طریق یک لوله با قطر کوچک قرار می گیرد. یک ونتوری، که بخشی از اجکتور است، سوخت را هدایت می کند. فشار کم هنگام عبور سوخت از ونتوری ایجاد می شود.
سوخت را می توان به مجموعه اجکتور مکیده و از طریق یک ورودی یا خطی که خارج از منطقه پمپ مخزن شروع می شود، به قسمت مخزن پمپ بنزین پمپ کرد. در ارتباط با سوپاپ های بازدارنده، پمپ های اجکتوری هد مثبت سوخت را در ورودی پمپ حفظ می کنند.
پمپ های الکتریکی ضربان دار
پمپ های سوخت کمکی کوچکتر و ارزانتر اغلب در هواپیماهای هوانوردی عمومی استفاده می شود. پمپ برقی پالسی که اغلب به عنوان پمپ بنزین از نوع پیستونی شناخته می شود، به طور گسترده استفاده می شود. در هواپیماهای بزرگتر، معمولاً مانند پمپ سوخت گریز از مرکز از آن استفاده می شود، با این تفاوت که در پایین دست خروجی های مخزن سوخت قرار می گیرد.
پمپ سوخت موتوری به موازات پمپ بنزین الکتریکی ضربان دار هدایت می شود. قبل از اینکه پمپ بنزین موتوری در هنگام راهاندازی به سرعت برسد، سوخت را تامین میکند و همچنین میتواند به عنوان پشتیبان در هنگام برخاستن از آن استفاده شود. همچنین می توان از آن برای جلوگیری از قفل شدن بخار در ارتفاعات استفاده کرد. یک پیستون سوخت را به داخل پمپ الکتریکی ضربان دار می کشد و بنزین را از آن بیرون می راند. پیستون در یک حرکت ضربانی توسط یک شیر برقی که به طور متناوب بین برق دار شدن و قطع شدن انرژی حرکت می کند، به جلو و عقب حرکت می کند.
فشار سوخت در خروجی پمپ، پمپ بنزین الکتریکی پالسی تک اثره را کنترل می کند. هنگامی که به بنزین نیاز است، پمپ با فشار کم در خروجی پمپ به سرعت چرخش می کند. پمپ با افزایش فشار سوخت کند می شود زیرا فنر کالیبره شده در حالی که سعی می کند پیستون را به سمت بالا به حرکت درآورد با مقاومت روبرو می شود. حرکت پیستون توسط یک فنر در مرکز کاهش می یابد.
پمپ های سوخت پره ای
رایج ترین انواع پمپ های سوخت که در هواپیماهای با موتور رفت و برگشتی دیده می شود، پمپ های سوخت پره ای هستند. می توان از آنها به عنوان پمپ بنزین اولیه و همچنین پمپ های کمکی یا بوست استفاده کرد. از طرف دیگر، پمپ پره ای، یک پمپ جابجایی ثابت است که با هر دور چرخش پمپ، حجم مداومی از سوخت را منتقل می کند. یک موتور الکتریکی شفت پمپ را هنگامی که به عنوان پمپ کمکی استفاده می شود می چرخاند. گیربکس کمکی اغلب پمپ پره ای را در سیستم های موتوری کار می کند.
پمپ سوخت هواپیما: نوع پره دوار.
یک روتور خارج از مرکز در داخل یک سیلندر رانده می شود، همانطور که در مورد تمام پمپ های پره ای وجود دارد. پرهها به داخل و خارج از شکافهای روتور میلغزند که توسط یک پین فاصلهگیر مرکزی در مقابل دیواره سیلندر قرار میگیرند. شکاف حجمی ایجاد شده توسط دیواره سیلندر، روتور و پره ها افزایش می یابد و سپس با چرخش پره ها به دور روتور خارج از مرکز کاهش می یابد.
بنزین از طریق یک درگاه ورودی که پره ها فضای افزایشی حجم تولید می کنند به پمپ وارد می شود. فضای تولید شده با پیشرفت چرخش کوچکتر می شود. سوخت توسط یک درگاه خروجی که در آنجا قرار دارد از سیلندر خارج می شود. مکانیسم اندازهگیری سوخت موتور، بنزین بیشتری از آنچه برای کار کردن نیاز دارد، تامین میکند. از طرف دیگر، حجم ثابت پمپ پره ای می تواند بیش از حد باشد.
اکثر پمپ های پره ای دارای ویژگی کاهش فشار هستند که ممکن است برای تنظیم جریان تنظیم شود. با استفاده از فشاری که در خروجی پمپ ایجاد میشود، یک سوپاپ را از روی صندلی آن بیرون میکشد و اجازه میدهد بنزین اضافی به سمت ورودی پمپ برگردد. حجم صحیح سوخت با قرار دادن ریل در فشاری بالاتر از فشار هوای ورودی دستگاه اندازه گیری سوخت موتور به دست می آید.
هنگام روشن شدن موتور یا اگر پمپ پره ای کار نمی کند، سوخت باید از طریق پمپ به دستگاه اندازه گیری سوخت جریان یابد. برای انجام این کار از یک شیر بای پس در داخل پمپ استفاده می شود. هنگامی که فشار سوخت ورودی پمپ بیشتر از فشار سوخت خروجی است، یک صفحه ضعیف فنر شده در زیر شیر تخلیه بر فشار فنر غلبه می کند.
هنگامی که پمپ پره ای پمپ سوخت اولیه موتور محور است، از پمپ های سوخت پره ای جبرانی استفاده می شود. همانطور که فشار هوای ورودی دستگاه اندازه گیری سوخت به دلیل ارتفاع یا فشار خروجی توربوشارژر تغییر می کند، تنظیم سوپاپ تسکین به طور خودکار تعدیل می شود تا تحویل صحیح سوخت را ارائه دهد. منبع فشار هوای ورودی به یک محفظه دریچه بالای دیافراگم متصل به مکانیسم تسکین متصل است. هنگامی که فشار هوا تغییر می کند، دیافراگم به فشار فنر سوپاپ کمک می کند یا مقاومت می کند و در نتیجه سوخت مناسب برای شرایط فعلی در دستگاه اندازه گیری سوخت را تحویل می دهد.
-
rohamavation
نام: roham hesami radرهام حسامی راد
محل اقامت: 100 مایلی شمال لندن جاده آیلستون، لستر، لسترشر. LE2
عضویت : سهشنبه ۱۳۹۹/۸/۲۰ - ۰۸:۳۴
پست: 3286-
سپاس: 5494
- جنسیت:
تماس:
Re: هوافضا
درهای هواپیما چگونه کار می کنند؟
درهای هواپیما به عنوان درب ورودی هواپیما عمل می کنند. آنها در کناره های بدنه قرار دارند و بسته به اندازه و مدل هواپیما انواع مختلفی دارند. بیشتر درها را به سمت بیرون یا داخل باز نگه می دارند، اما در برخی از هواپیماها به سمت بالا باز می شوند و روی سقف قرار می گیرند
درب های اضطراری نوع I، II و III چه تفاوت هایی دارند؟
تفاوت عمده در اندازه است.
(1) نوع I. این نوع خروجی در سطح کف با دهانه مستطیلی است که عرض آن کمتر از 24 اینچ و ارتفاع 48 اینچ نیست و شعاع گوشه آن بیشتر از هشت اینچ نیست.
(2) نوع II. این نوع یک دهانه مستطیل شکل است که عرض آن کمتر از 20 اینچ در ارتفاع 44 اینچ نیست و شعاع گوشه آن بیشتر از هفت اینچ نیست. خروجیهای نوع دوم باید خروجیهای سطح کف باشند، مگر اینکه روی بال قرار داشته باشند، در این صورت نباید در داخل هواپیما بیش از 10 اینچ پلهای داشته باشند و یا خارج از هواپیما بیش از 17 اینچ پایین بیایند.
(3) نوع III. این نوع یک دهانه مستطیل شکل با عرض حداقل 20 اینچ در ارتفاع 36 اینچ با شعاع گوشهای که بیش از هفت اینچ نیست و با یک پله در داخل هواپیما بیش از 20 اینچ نیست. اگر خروجی روی بال قرار داشته باشد، پایین آمدن خارج از هواپیما نباید از 27 اینچ تجاوز کند.
نوع IV نیز وجود دارد:
(4) نوع IV. این نوع یک دهانه مستطیل شکل است که عرض آن کمتر از 19 اینچ در ارتفاع 26 اینچ نیست، با شعاع گوشه ای نه بیشتر از 6.3 اینچ، در بالای بال قرار دارد، با یک پله در داخل هواپیما حداکثر 29 اینچ و یک پله در خارج از هواپیما بیش از 36 اینچ نباشد.
این برجستگی روی در چیست؟یک سرسره فرار درون یک کلاهک فشار فیبر کربنی قرار دارد که با پوششی از مواد مشابه دیوارهای داخلی هواپیما پوشانده شده است - آن جعبه مربع بزرگ در پایین درب داخلی هواپیما.
تخلیه

چرا فشار داخل هواپیما باعث باز شدن درها نمی شود؟ چه چیزی مانع از آن می شود که مسافر در اواسط پرواز به میل خود درب اضطراری را باز کند؟
هنگام پرواز در ارتفاع کروز، فشار داخل هواپیما بیشتر از بیرون است و این بدان معناست که هوای زیادی در را به سمت بیرون می راند. پس چگونه درب سر جای خود می ماند و باز نمی شود؟
من نمیپرسم که آیا مسافری میتواند دری را باز کند، زیرا این تقریباً غیرممکن است. می پرسم اگر هوای زیادی به بیرون فشار می دهد درب چگونه باز نمی شود؟
بیشتر درهای خطوط هوایی از نوع پلاگین هستند، یعنی گوه ای شکل هستند، به طوری که اختلاف فشار آن را به بدنه فشار می دهد و از باز شدن آن جلوگیری می کند.
توجه داشته باشید که در از داخل بزرگتر است، به طوری که وقتی در موقعیت قفل است، فشار آن را به بدنه فشار می دهد و از باز شدن آن جلوگیری می کند. برای باز کردن در، باید قبل از بیرون رفتن به سمت داخل چرخانده شود.شما نمی توانید باز کنید زیرا هواپیما تحت فشار است و فشار کابین بیشتر از فشار هوای بیرون است. این تفاوت می تواند به اندازه 55158.1 نیوتن در هر متر مربع (یا 5500 کیلوگرم اعمال شده به یک متر مربع) باشد. اساساً درب در برابر قاب هواپیما آب بندی می شود.
در ارتفاع کمتر اختلاف فشار کمتر است و با ارتفاع بیشتر می شود. به گفته اسمیت، این در ارتفاع معمولی کروز، با فشاری حدود هشت پوند که به هر اینچ مربع از بدنه داخلی فشار میآورد، انجام میشود – هزار و صد پوند در برابر هر فوت مربع درب. مهم نیست مسافری که میخواهد چقدر قوی باشد - آنها در را باز نمیکنند.
برایافرادد روانی در واقع پنجرهها هستند، نه درها، که معمولاً نقطه ضعف هواپیما هستند. و متأسفانه، این یک واقعیته که در صورت باز شدن در، مسافران به سمت دهانه مکیده شوند. در صورت رفع فشار یا خرابی دربها، مسافران به دلیل اختلاف فشاری که مسافران را به بیرون رانده میکند، مکیده میشوند، بنابراین همیشه توصیه میشود کمربند ایمنی را ببندند.
توالتهای هواپیماهای مسافربری - آیا فشار منفی داخل مخازن توسط یک پمپ ایجاد میشود یا مخازن به فشار هوای بیرون متصل هستند؟ با توجه به اینکه توالت ها باید روی زمین هم کار کنند، فرض می کنم از پمپ ها استفاده می شود - از طرف دیگر ممکن است فشار کم از آخرین پرواز در داخل مخازن ذخیره شود؟ همچنین، پمپ ها به این معنی است که وقتی هواپیما روشن نیست، توالت ها کار نمی کنند - آیا این درست است؟ همچنین مشکل مهندسی پاک نگه داشتن پمپ ها یا لوله های متصل به بیرون از زباله چگونه حل شد؟اختلاف فشار در توالت های هواپیمای مسافربری چگونه ایجاد می شود؟
فشار در پرواز با استفاده از خلاء بیرونی ایجاد می شود. این دوز روی زمین یا در ارتفاع کم کار نمی کند، بنابراین یک پمپ نیز برای بیرون کشیدن هوا برای ایجاد خلاء مصنوعی وجود دارد.
با توجه به اینکه توالت ها باید روی زمین هم کار کنند، فرض می کنم از پمپ ها استفاده می شود - از طرف دیگر ممکن است فشار کم از آخرین پرواز در داخل مخازن ذخیره شود؟ همچنین، پمپ ها به این معنی است که وقتی هواپیما روشن نیست، توالت ها کار نمی کنند - آیا این درست است؟
در مورد این مورد مطمئن نیستم، اما از آنجایی که هواپیما به ندرت زمانی که شخصی در هواپیما است نیرو نمی گیرد (تعمیرات و تعمیرات بدون برق نیز نمی تواند کار زیادی انجام دهد)، نمی توانم فکر کنم که این مشکل مهمی باشد. ممکن است کمی فشار باقی مانده باشد.
ایرباس بیان میکند که پمپ خلاء از گذرگاه برق AC خارج میشود، بنابراین وقتی موتورها روشن نیستند، ممکن است از زمین یا APU تغذیه شود.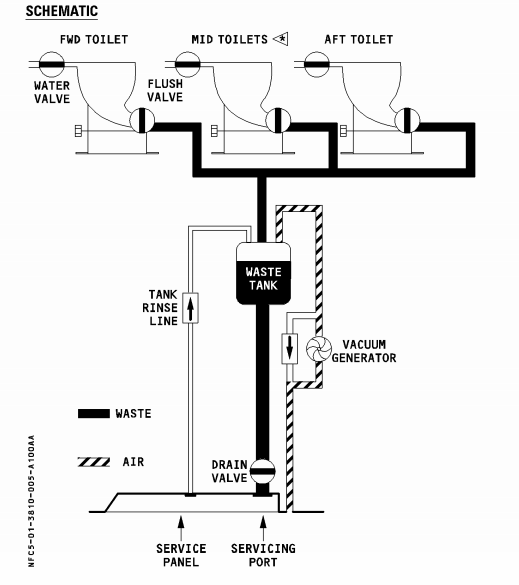
همچنین مشکل پاک نگه داشتن پمپ ها یا لوله های متصل به بیرون از زباله چگونه حل شد؟
، مخزن با کمک یک پورت دوم روی درپوش دسترسی برای تمیز کردن آن شستشو داده می شود. من معتقدم بقیه سیستم طوری طراحی شده است که تا تعمیر بعدی دوام بیاورد، زمانی که (فکر می کنم) به یک شلنگ فشار قوی وصل می شود تا کاملا تمیز شود.
آیا این درست است که درهای کابین خلبان ضد گلوله هستند؟
(الف) حفاظت از محفظه خدمه پرواز. اگر طبق قوانین عملیاتی نیاز به درب عرشه پرواز است:
(1) دیوار، در و هر مرز قابل دسترس دیگری که محفظه خدمه پرواز را از مناطق اشغالی جدا می کند باید به گونه ای طراحی شود که در برابر نفوذ اجباری افراد غیرمجاز مقاومت کند و بتواند در برابر ضربه های 300 ژول (221.3 فوت پوند) مقاومت کند.
(2) دیوار، در و هر مرز قابل دسترس دیگری که محفظه خدمه پرواز را از مناطق اشغال شده جدا می کند باید به گونه ای طراحی شود که در برابر بار کششی ثابت 250 پوندی (1113 نیوتن) روی دسته های قابل دسترس، از جمله دستگیره یا دستگیره در، مقاومت کند.
(3) دیوار، در و هر مرز دیگری که محفظه خدمه پرواز را از مناطق اشغالی جدا میکند باید به گونهای طراحی شود که در برابر نفوذ آتش سلاحهای سبک و دستگاههای تکه تکه شدن تا سطحی معادل سطح IIIa استاندارد موسسه ملی استاندارد امریکا ANSI National Institute of Standards and Technology)و ادراه هوانوردی فدرال The Federal Aviation Administrationوهیئت ملی ایمنی ترابری (NTSB، انتیاسبی همه و همه نظارت دارند بر ساخت هواپیماها و راکتها و پرواز های فضایی
بنابراین به طور خلاصه، هر هواپیمایی که بر اساس قوانین باید دارای درب کابین خلبان مقاوم در برابر گلوله باشد.
درهای هواپیما به عنوان درب ورودی هواپیما عمل می کنند. آنها در کناره های بدنه قرار دارند و بسته به اندازه و مدل هواپیما انواع مختلفی دارند. بیشتر درها را به سمت بیرون یا داخل باز نگه می دارند، اما در برخی از هواپیماها به سمت بالا باز می شوند و روی سقف قرار می گیرند
درب های اضطراری نوع I، II و III چه تفاوت هایی دارند؟
تفاوت عمده در اندازه است.
(1) نوع I. این نوع خروجی در سطح کف با دهانه مستطیلی است که عرض آن کمتر از 24 اینچ و ارتفاع 48 اینچ نیست و شعاع گوشه آن بیشتر از هشت اینچ نیست.
(2) نوع II. این نوع یک دهانه مستطیل شکل است که عرض آن کمتر از 20 اینچ در ارتفاع 44 اینچ نیست و شعاع گوشه آن بیشتر از هفت اینچ نیست. خروجیهای نوع دوم باید خروجیهای سطح کف باشند، مگر اینکه روی بال قرار داشته باشند، در این صورت نباید در داخل هواپیما بیش از 10 اینچ پلهای داشته باشند و یا خارج از هواپیما بیش از 17 اینچ پایین بیایند.
(3) نوع III. این نوع یک دهانه مستطیل شکل با عرض حداقل 20 اینچ در ارتفاع 36 اینچ با شعاع گوشهای که بیش از هفت اینچ نیست و با یک پله در داخل هواپیما بیش از 20 اینچ نیست. اگر خروجی روی بال قرار داشته باشد، پایین آمدن خارج از هواپیما نباید از 27 اینچ تجاوز کند.
نوع IV نیز وجود دارد:
(4) نوع IV. این نوع یک دهانه مستطیل شکل است که عرض آن کمتر از 19 اینچ در ارتفاع 26 اینچ نیست، با شعاع گوشه ای نه بیشتر از 6.3 اینچ، در بالای بال قرار دارد، با یک پله در داخل هواپیما حداکثر 29 اینچ و یک پله در خارج از هواپیما بیش از 36 اینچ نباشد.
این برجستگی روی در چیست؟یک سرسره فرار درون یک کلاهک فشار فیبر کربنی قرار دارد که با پوششی از مواد مشابه دیوارهای داخلی هواپیما پوشانده شده است - آن جعبه مربع بزرگ در پایین درب داخلی هواپیما.
تخلیه
چرا فشار داخل هواپیما باعث باز شدن درها نمی شود؟ چه چیزی مانع از آن می شود که مسافر در اواسط پرواز به میل خود درب اضطراری را باز کند؟
هنگام پرواز در ارتفاع کروز، فشار داخل هواپیما بیشتر از بیرون است و این بدان معناست که هوای زیادی در را به سمت بیرون می راند. پس چگونه درب سر جای خود می ماند و باز نمی شود؟
من نمیپرسم که آیا مسافری میتواند دری را باز کند، زیرا این تقریباً غیرممکن است. می پرسم اگر هوای زیادی به بیرون فشار می دهد درب چگونه باز نمی شود؟
بیشتر درهای خطوط هوایی از نوع پلاگین هستند، یعنی گوه ای شکل هستند، به طوری که اختلاف فشار آن را به بدنه فشار می دهد و از باز شدن آن جلوگیری می کند.
توجه داشته باشید که در از داخل بزرگتر است، به طوری که وقتی در موقعیت قفل است، فشار آن را به بدنه فشار می دهد و از باز شدن آن جلوگیری می کند. برای باز کردن در، باید قبل از بیرون رفتن به سمت داخل چرخانده شود.شما نمی توانید باز کنید زیرا هواپیما تحت فشار است و فشار کابین بیشتر از فشار هوای بیرون است. این تفاوت می تواند به اندازه 55158.1 نیوتن در هر متر مربع (یا 5500 کیلوگرم اعمال شده به یک متر مربع) باشد. اساساً درب در برابر قاب هواپیما آب بندی می شود.
در ارتفاع کمتر اختلاف فشار کمتر است و با ارتفاع بیشتر می شود. به گفته اسمیت، این در ارتفاع معمولی کروز، با فشاری حدود هشت پوند که به هر اینچ مربع از بدنه داخلی فشار میآورد، انجام میشود – هزار و صد پوند در برابر هر فوت مربع درب. مهم نیست مسافری که میخواهد چقدر قوی باشد - آنها در را باز نمیکنند.
برایافرادد روانی در واقع پنجرهها هستند، نه درها، که معمولاً نقطه ضعف هواپیما هستند. و متأسفانه، این یک واقعیته که در صورت باز شدن در، مسافران به سمت دهانه مکیده شوند. در صورت رفع فشار یا خرابی دربها، مسافران به دلیل اختلاف فشاری که مسافران را به بیرون رانده میکند، مکیده میشوند، بنابراین همیشه توصیه میشود کمربند ایمنی را ببندند.
توالتهای هواپیماهای مسافربری - آیا فشار منفی داخل مخازن توسط یک پمپ ایجاد میشود یا مخازن به فشار هوای بیرون متصل هستند؟ با توجه به اینکه توالت ها باید روی زمین هم کار کنند، فرض می کنم از پمپ ها استفاده می شود - از طرف دیگر ممکن است فشار کم از آخرین پرواز در داخل مخازن ذخیره شود؟ همچنین، پمپ ها به این معنی است که وقتی هواپیما روشن نیست، توالت ها کار نمی کنند - آیا این درست است؟ همچنین مشکل مهندسی پاک نگه داشتن پمپ ها یا لوله های متصل به بیرون از زباله چگونه حل شد؟اختلاف فشار در توالت های هواپیمای مسافربری چگونه ایجاد می شود؟
فشار در پرواز با استفاده از خلاء بیرونی ایجاد می شود. این دوز روی زمین یا در ارتفاع کم کار نمی کند، بنابراین یک پمپ نیز برای بیرون کشیدن هوا برای ایجاد خلاء مصنوعی وجود دارد.
با توجه به اینکه توالت ها باید روی زمین هم کار کنند، فرض می کنم از پمپ ها استفاده می شود - از طرف دیگر ممکن است فشار کم از آخرین پرواز در داخل مخازن ذخیره شود؟ همچنین، پمپ ها به این معنی است که وقتی هواپیما روشن نیست، توالت ها کار نمی کنند - آیا این درست است؟
در مورد این مورد مطمئن نیستم، اما از آنجایی که هواپیما به ندرت زمانی که شخصی در هواپیما است نیرو نمی گیرد (تعمیرات و تعمیرات بدون برق نیز نمی تواند کار زیادی انجام دهد)، نمی توانم فکر کنم که این مشکل مهمی باشد. ممکن است کمی فشار باقی مانده باشد.
ایرباس بیان میکند که پمپ خلاء از گذرگاه برق AC خارج میشود، بنابراین وقتی موتورها روشن نیستند، ممکن است از زمین یا APU تغذیه شود.
همچنین مشکل پاک نگه داشتن پمپ ها یا لوله های متصل به بیرون از زباله چگونه حل شد؟
، مخزن با کمک یک پورت دوم روی درپوش دسترسی برای تمیز کردن آن شستشو داده می شود. من معتقدم بقیه سیستم طوری طراحی شده است که تا تعمیر بعدی دوام بیاورد، زمانی که (فکر می کنم) به یک شلنگ فشار قوی وصل می شود تا کاملا تمیز شود.
آیا این درست است که درهای کابین خلبان ضد گلوله هستند؟
(الف) حفاظت از محفظه خدمه پرواز. اگر طبق قوانین عملیاتی نیاز به درب عرشه پرواز است:
(1) دیوار، در و هر مرز قابل دسترس دیگری که محفظه خدمه پرواز را از مناطق اشغالی جدا می کند باید به گونه ای طراحی شود که در برابر نفوذ اجباری افراد غیرمجاز مقاومت کند و بتواند در برابر ضربه های 300 ژول (221.3 فوت پوند) مقاومت کند.
(2) دیوار، در و هر مرز قابل دسترس دیگری که محفظه خدمه پرواز را از مناطق اشغال شده جدا می کند باید به گونه ای طراحی شود که در برابر بار کششی ثابت 250 پوندی (1113 نیوتن) روی دسته های قابل دسترس، از جمله دستگیره یا دستگیره در، مقاومت کند.
(3) دیوار، در و هر مرز دیگری که محفظه خدمه پرواز را از مناطق اشغالی جدا میکند باید به گونهای طراحی شود که در برابر نفوذ آتش سلاحهای سبک و دستگاههای تکه تکه شدن تا سطحی معادل سطح IIIa استاندارد موسسه ملی استاندارد امریکا ANSI National Institute of Standards and Technology)و ادراه هوانوردی فدرال The Federal Aviation Administrationوهیئت ملی ایمنی ترابری (NTSB، انتیاسبی همه و همه نظارت دارند بر ساخت هواپیماها و راکتها و پرواز های فضایی
بنابراین به طور خلاصه، هر هواپیمایی که بر اساس قوانین باید دارای درب کابین خلبان مقاوم در برابر گلوله باشد.
-
rohamavation
نام: roham hesami radرهام حسامی راد
محل اقامت: 100 مایلی شمال لندن جاده آیلستون، لستر، لسترشر. LE2
عضویت : سهشنبه ۱۳۹۹/۸/۲۰ - ۰۸:۳۴
پست: 3286-
سپاس: 5494
- جنسیت:
تماس:
Re: هوافضا
فیرینگ محموله مخروطی دماغه ای است که برای محافظت از محموله فضاپیما در برابر تأثیر فشار دینامیکی و گرمایش آیرودینامیکی در حین پرتاب از طریق جو استفاده می شود. ... هنگامی که از جو خارج شد، فیرینگ پرتاب می شود و محموله را در معرض فضای بیرونی قرار می دهد.در واقعfairing قطعاتی که برای کاستن مقاومت هوا فیرینگها معمولاً از آلومینیوم یا مواد کامپوزیت ساخته میشوند و دارای پتوهایی از مواد جاذب صوتی هستند تا فضاپیما را در برابر نویزهای قابل توجه و ارتعاشات با فرکانس بالا که در حین بلند شدن رخ میدهد، محافظت کنند.فیرینگ اسپیس ایکس از چه چیزی ساخته شده است؟
این فیرینگ که از یک ماده کامپوزیت کربن ساخته شده است، از ماهواره ها در مسیرشان به مدار محافظت می کند. فیرینگ تقریباً 3 دقیقه پس از پرواز رها می شود و SpaceX به بازیابی فیرینگ ها برای استفاده مجدد در مأموریت های آینده ادامه می دهد.فالکون 9 برای محافظت از ماهوارههای (غیر دراگون) در حین پرتاب از یک محفظه بار استفاده میکند. فیرینگ 13 متر (43 فوت) طول، 5.2 متر (17 فوت) قطر، تقریباً 1900 کیلوگرم وزن دارد و از پوست فیبر کربن که روی یک هسته لانه زنبوری آلومینیومی پوشانده شده است، ساخته شده است.فیرینگ قابل بازیابی است، بقیه موشک به کار خود ادامه می دهد و قابل بازیابی نیست.آیا وکیوم فیرینگ می تواند محموله را در برابر بارهای صوتی محافظت کند؟اول از همه، چنین فیرینگی باید از نظر ساختاری کاملاً متفاوت از آنهایی باشد که شما می شناسید. فیرینگ های معمولی فقط باید با فشار دینامیکی کنار بیایند، فشاری که برای شاتل و ساترن V کمی کمتر از 40 کیلو پاسکال است (و احتمالاً برای سایر وسایل نقلیه پرتاب در همان جایگاه توپ). زیاد به نظر نمی رسد، اما در حال حاضر یک محدودیت طراحی مهم است.
فیرینگ تخلیه شده شما باید 100 کیلو پاسکال فشار هوای سطح دریا را تحمل کند و بنابراین باید حداقل 3-4 برابر قوی تر و سنگین تر از یک فیرینگ معمولی باشد. با توجه به اینکه فیرینگ های فعلی چندین تن وزن دارند و برای مفید بودن باید آنها را تا انتها از جو حمل کنید، این وزن اضافی به میزان قابل توجهی بر محموله شما تأثیر می گذارد.
اما بدتر می شود. موشکها معمولاً با AoA نزدیک به صفر پرواز میکنند، بنابراین فشار دینامیکی بهعنوان بار فشاری رو به رو عمل میکند. به همین دلیل است که شکل آنها بسیار شبیه قوس های گوتیک است. اما فشار هوا از همه طرف بر روی یک فیرینگ تخلیه شده تأثیر می گذارد. یک قوطی نوشابه خالی نیز به راحتی بارها را از بالا تحمل می کند، اما سعی کنید آن را بفشارید و به شدت از کار می افتد. بنابراین فیرینگ باید یا شکل کاملاً متفاوت (کروی تر) یا مهاربندی اضافی برای تحمل بارها از طرفین داشته باشد. همچنین این احتمال وجود دارد که شما مجبور باشید بیشتر لانچر را حول آن فیرینگ عجیب و غریب طراحی کنید. ممکن است در یافتن محمولههای کافی که میتوانند از خلاء کافی برای پرداخت هزینههای آن توسعه قدردانی کنند، مشکل داشته باشید.
در نهایت، واقعاً تخلیه فیرینگ بسیار سخت خواهد بود. حتی اگر شما احتمالاً فقط به یک خلاء ضعیف (یک دو کیلو پاسکال) نیاز دارید، تخلیه چیزی به اندازه یک اتوبوس یا یک اتاق نشیمن تا آن سطح دقیقاً آسان نیست. (فشار دادن چیزهای بی اهمیت است، شما فقط به یک بطری فشار و یک دریچه نیاز دارید، اما برعکس این امر مستلزم کار واقعی به عنوان یک نتیجه تاسف بار قانون دوم ترمودینامیک است.) به همین دلیل است که همه ما هنوز به جای استفاده از هایپرلوپ در قطارها گیر کرده ایم. هر روز کارکردن.
می توانید آن را با استفاده از تجهیزات زمینی تخلیه کنید و فقط آن را مهر و موم نگه دارید. اما با تمام تکانهایی که در طول پرتاب انجام میشود، تنها افزودن اورینگ (یا دو) احتمالاً برای حفظ هوای کامل آن کافی نخواهد بود. فقط یک نشتی کوچک در جایی لازم است تا جاروبرقی شما و تمام مزایای آن کاملاً خراب شود و فیرینگ گرانبهای شما به وزن مرده تبدیل شود. یا میتوانید چند پمپ و باتری اضافه کنید تا هوا را در طول پرتاب به طور فعال حفظ کنید،
سیستم جداسازی فیرینگ کم شوک و سیستم پرتاب.RUAG برای پرتابگرهای Ariane و Vega اروپا فیرینگ تولید میکند و اخیرا نشان داده است که چگونه یک سوراخ کوچک صفحهنمای پانلهای فیرینگ میتواند نویز و لرزشها را کاهش دهد و چگونه یک سیستم لولا و فعالسازی جدید میتواند شوک جداسازی فیرینگ را کاهش دهد. وسیله پرتاب هنگامی که به فضا می رسد.
: «فناوری فعلی متکی به یک سیستم ساده، فشرده و بسیار قابل اعتماد است که حدود سه دقیقه پس از پرواز در ارتفاع حدود 100 کیلومتری، یعنی زمانی که موشک وارد فضا می شود، فیرینگ محافظ را از بین می برد. مدیر فناوری برنامه
جداسازی فیرینگ کم شوک جدید و پرتاب
"معمولاً دو مکانیسم پیروتکنیک منفجر میشوند تا لولاها منفجر شوند و به نیمه پوستههای فیرینگ اجازه میدهند به طور ایمن از محموله ذخیره شده در داخل جدا شده و دور شوند. همه اینها در یک ثانیه اتفاق میافتد و یک رویداد بسیار دقیق و هماهنگ است."
این دستگاه های پیروتکنیک با فیرینگ پرتاب می شوند. آنها در حالی که نسبتا سبک و جمع و جور هستند، نیروی قدرتمندی را ارائه می دهند و فناوری اثبات شده ای هستند.
"با این حال، هنگامی که این وسایل پیروتکنیک فعال میشوند، یک اثر شوک قوی ایجاد میکنند که به پرتابگر و محموله آن منتقل میشود. ماهوارهها برای مقاومت در برابر این امر طراحی شدهاند، اما شرکتها اکنون درخواست راحتی بیشتری دارند."
سیستم های پیروتکنیک قبل از واجد شرایط شدن برای پرواز نیاز به آزمایش کامل دارند، که شدید، گران است و به شرایط خلاء نیاز دارد. یکی از مزایای اصلی سیستم جداسازی و پرتاب با شوک کم جایگزینی RUAG این است که برای آزمایشات به محفظه خلاء گران قیمت نیاز نیست زیرا جداسازی متکی به فرآیند غیرآتش سوزی کمی کندتر است که باعث می شود اصطکاک با هوا در آزمایش های زمینی بسیار کمتر باشد.
RUAG میتواند با استفاده از مجموعهای از لولاهای از پیش بارگذاری شده و محرکهای پنوماتیک همراه با یک سیستم پرتاب غیرفعال که پس از فعال شدن سیستمهای جداسازی قطعات را دور میزند، به نتایج مشابهی دست یابد.
«این سیستم جداسازی و پرتاب جدید، مبتنی بر لولا و محرک، شوک را کاهش میدهد و راحتی بار را در طول رویداد جداسازی افزایش میدهد
این فیرینگ که از یک ماده کامپوزیت کربن ساخته شده است، از ماهواره ها در مسیرشان به مدار محافظت می کند. فیرینگ تقریباً 3 دقیقه پس از پرواز رها می شود و SpaceX به بازیابی فیرینگ ها برای استفاده مجدد در مأموریت های آینده ادامه می دهد.فالکون 9 برای محافظت از ماهوارههای (غیر دراگون) در حین پرتاب از یک محفظه بار استفاده میکند. فیرینگ 13 متر (43 فوت) طول، 5.2 متر (17 فوت) قطر، تقریباً 1900 کیلوگرم وزن دارد و از پوست فیبر کربن که روی یک هسته لانه زنبوری آلومینیومی پوشانده شده است، ساخته شده است.فیرینگ قابل بازیابی است، بقیه موشک به کار خود ادامه می دهد و قابل بازیابی نیست.آیا وکیوم فیرینگ می تواند محموله را در برابر بارهای صوتی محافظت کند؟اول از همه، چنین فیرینگی باید از نظر ساختاری کاملاً متفاوت از آنهایی باشد که شما می شناسید. فیرینگ های معمولی فقط باید با فشار دینامیکی کنار بیایند، فشاری که برای شاتل و ساترن V کمی کمتر از 40 کیلو پاسکال است (و احتمالاً برای سایر وسایل نقلیه پرتاب در همان جایگاه توپ). زیاد به نظر نمی رسد، اما در حال حاضر یک محدودیت طراحی مهم است.
فیرینگ تخلیه شده شما باید 100 کیلو پاسکال فشار هوای سطح دریا را تحمل کند و بنابراین باید حداقل 3-4 برابر قوی تر و سنگین تر از یک فیرینگ معمولی باشد. با توجه به اینکه فیرینگ های فعلی چندین تن وزن دارند و برای مفید بودن باید آنها را تا انتها از جو حمل کنید، این وزن اضافی به میزان قابل توجهی بر محموله شما تأثیر می گذارد.
اما بدتر می شود. موشکها معمولاً با AoA نزدیک به صفر پرواز میکنند، بنابراین فشار دینامیکی بهعنوان بار فشاری رو به رو عمل میکند. به همین دلیل است که شکل آنها بسیار شبیه قوس های گوتیک است. اما فشار هوا از همه طرف بر روی یک فیرینگ تخلیه شده تأثیر می گذارد. یک قوطی نوشابه خالی نیز به راحتی بارها را از بالا تحمل می کند، اما سعی کنید آن را بفشارید و به شدت از کار می افتد. بنابراین فیرینگ باید یا شکل کاملاً متفاوت (کروی تر) یا مهاربندی اضافی برای تحمل بارها از طرفین داشته باشد. همچنین این احتمال وجود دارد که شما مجبور باشید بیشتر لانچر را حول آن فیرینگ عجیب و غریب طراحی کنید. ممکن است در یافتن محمولههای کافی که میتوانند از خلاء کافی برای پرداخت هزینههای آن توسعه قدردانی کنند، مشکل داشته باشید.
در نهایت، واقعاً تخلیه فیرینگ بسیار سخت خواهد بود. حتی اگر شما احتمالاً فقط به یک خلاء ضعیف (یک دو کیلو پاسکال) نیاز دارید، تخلیه چیزی به اندازه یک اتوبوس یا یک اتاق نشیمن تا آن سطح دقیقاً آسان نیست. (فشار دادن چیزهای بی اهمیت است، شما فقط به یک بطری فشار و یک دریچه نیاز دارید، اما برعکس این امر مستلزم کار واقعی به عنوان یک نتیجه تاسف بار قانون دوم ترمودینامیک است.) به همین دلیل است که همه ما هنوز به جای استفاده از هایپرلوپ در قطارها گیر کرده ایم. هر روز کارکردن.
می توانید آن را با استفاده از تجهیزات زمینی تخلیه کنید و فقط آن را مهر و موم نگه دارید. اما با تمام تکانهایی که در طول پرتاب انجام میشود، تنها افزودن اورینگ (یا دو) احتمالاً برای حفظ هوای کامل آن کافی نخواهد بود. فقط یک نشتی کوچک در جایی لازم است تا جاروبرقی شما و تمام مزایای آن کاملاً خراب شود و فیرینگ گرانبهای شما به وزن مرده تبدیل شود. یا میتوانید چند پمپ و باتری اضافه کنید تا هوا را در طول پرتاب به طور فعال حفظ کنید،
سیستم جداسازی فیرینگ کم شوک و سیستم پرتاب.RUAG برای پرتابگرهای Ariane و Vega اروپا فیرینگ تولید میکند و اخیرا نشان داده است که چگونه یک سوراخ کوچک صفحهنمای پانلهای فیرینگ میتواند نویز و لرزشها را کاهش دهد و چگونه یک سیستم لولا و فعالسازی جدید میتواند شوک جداسازی فیرینگ را کاهش دهد. وسیله پرتاب هنگامی که به فضا می رسد.
: «فناوری فعلی متکی به یک سیستم ساده، فشرده و بسیار قابل اعتماد است که حدود سه دقیقه پس از پرواز در ارتفاع حدود 100 کیلومتری، یعنی زمانی که موشک وارد فضا می شود، فیرینگ محافظ را از بین می برد. مدیر فناوری برنامه
جداسازی فیرینگ کم شوک جدید و پرتاب
"معمولاً دو مکانیسم پیروتکنیک منفجر میشوند تا لولاها منفجر شوند و به نیمه پوستههای فیرینگ اجازه میدهند به طور ایمن از محموله ذخیره شده در داخل جدا شده و دور شوند. همه اینها در یک ثانیه اتفاق میافتد و یک رویداد بسیار دقیق و هماهنگ است."
این دستگاه های پیروتکنیک با فیرینگ پرتاب می شوند. آنها در حالی که نسبتا سبک و جمع و جور هستند، نیروی قدرتمندی را ارائه می دهند و فناوری اثبات شده ای هستند.
"با این حال، هنگامی که این وسایل پیروتکنیک فعال میشوند، یک اثر شوک قوی ایجاد میکنند که به پرتابگر و محموله آن منتقل میشود. ماهوارهها برای مقاومت در برابر این امر طراحی شدهاند، اما شرکتها اکنون درخواست راحتی بیشتری دارند."
سیستم های پیروتکنیک قبل از واجد شرایط شدن برای پرواز نیاز به آزمایش کامل دارند، که شدید، گران است و به شرایط خلاء نیاز دارد. یکی از مزایای اصلی سیستم جداسازی و پرتاب با شوک کم جایگزینی RUAG این است که برای آزمایشات به محفظه خلاء گران قیمت نیاز نیست زیرا جداسازی متکی به فرآیند غیرآتش سوزی کمی کندتر است که باعث می شود اصطکاک با هوا در آزمایش های زمینی بسیار کمتر باشد.
RUAG میتواند با استفاده از مجموعهای از لولاهای از پیش بارگذاری شده و محرکهای پنوماتیک همراه با یک سیستم پرتاب غیرفعال که پس از فعال شدن سیستمهای جداسازی قطعات را دور میزند، به نتایج مشابهی دست یابد.
«این سیستم جداسازی و پرتاب جدید، مبتنی بر لولا و محرک، شوک را کاهش میدهد و راحتی بار را در طول رویداد جداسازی افزایش میدهد
-
rohamavation
نام: roham hesami radرهام حسامی راد
محل اقامت: 100 مایلی شمال لندن جاده آیلستون، لستر، لسترشر. LE2
عضویت : سهشنبه ۱۳۹۹/۸/۲۰ - ۰۸:۳۴
پست: 3286-
سپاس: 5494
- جنسیت:
تماس:
Re: هوافضا
سیستم الکتریکی هواپیمای شما دارای سه جزء اصلیه یک باتری، یک ژنراتور یا دینام، و یک هاب الکتریکی برای توزیع نیروی الکتریکی. شمع ها در موتورهای هواپیمای پیستونی تایید شده توسط مغناطیس های موتوری کار می کنند، بنابراین برای کارکرد موتور به نیروی الکتریکی اضافی نیاز نیست.سوال اول آیا هواپیماها از DC یا AC استفاده می کنند؟به نظرم اره و اونچه خوندم
عموما هواپیما از برق 115 ولت AC و 28 ولت DC استفاده می کنه. برق AC توسط دو سیستم تولید موتور محرک تامین می شود.ایرباس از 28 ولت DC استفاده می کند، عمدتاً برای چیزهایی مانند سنسورها و غیره، بنابراین مصرف کلی برق در سیستم DC بسیار کم است: به عنوان مثال، A350 دارای 4 واحد یکسو کننده ترانسفورماتور (TRU) است که AC را به DC تبدیل می کند. 2 مورد از آنها به عنوان "عادی" و 2 به عنوان "اورژانس" تعیین شده اند. هر کدام دارای توان اسمی حدود 300 وات هستند. کل استفاده از سیستم DC حدود 500 وات است. . متاسفانه من از بوئینگ اطلاعی زیادی ندارم.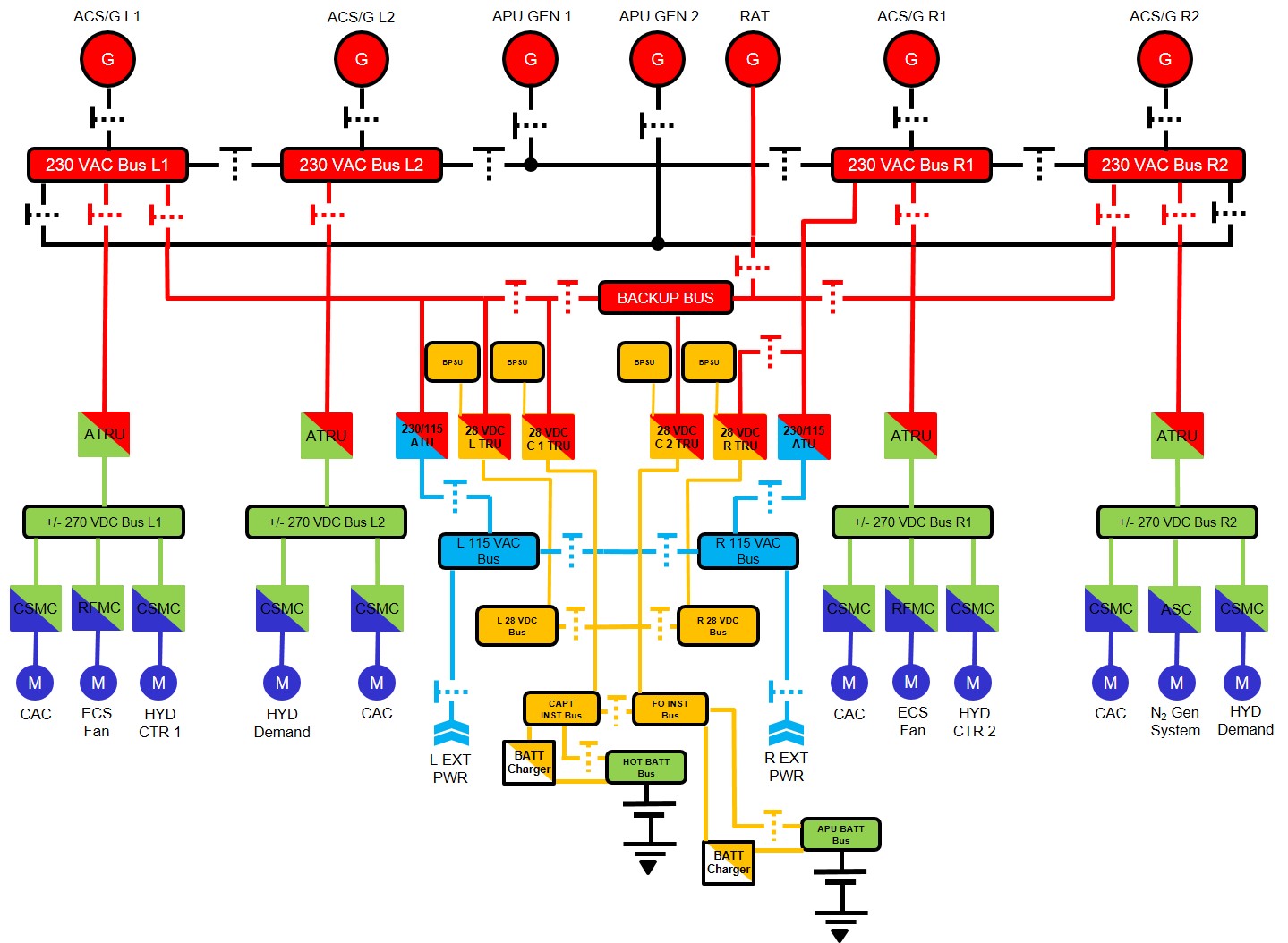
به نظر می رسه که بوئینگ از 28 ولت DC نیز استفاده می کند - که منطقی است، من انتظار دارم ایرباس از 28 ولت DC در A300 استفاده کند، همانطور که در آن زمان استاندارد بود، و تا به امروز از آن استفاده کرده است.بیشتر هواپیماهای مسافربری ازهردو جریان مستقیم(DC)وجریان متناوب(AC)استفاده میکنند.گرچه ولتاژهای متفاوتی درهواپیماهای موجود استفاده میشود ولی بیشترهواپیمای بزرگ مسافربری ازجریان مستقیم با ولتاژ28V وجریان متناوب سه فازبا ولتاژ115V و فرکانس 400HZ برای تأمین نیازهواپیما استفاده میکنند.
با به کارگیری دستگاه یک سوکننده ها ransformer Rectifier Unit که ولتاژمتناوب115V را به ولتاژ28V جریان مستقیم تبدیل میکند،ترمینالهای جریان مستقیم واجزای سیستم جریان مستقیم از طریق ژنراتورهای جریان متناوب تأمین میشود.در بعضی هواپیماها ولتاژ 115V متناوب به ولتاژ26V متناوب تبدیل وبرای مدارهای روشنایی بکار می رود.
در مواقع اضطراری که ژنراتور الکتریکی بطور کامل ازکارمی افتد ویا در هنگام stand by بودن سیستم،قدرت مورد نیازسیستم های الکتریکی والکترونیکی هواپیما ازطریق باتری های داخل هواپیما که دارای ولتاژ28V جریان مستقیم هستند،تأمین میشود.قدرت اصلی برای جریان متناوب درهنگام stand by بودن سیستم از طریق وسیله ای بنام static inverterکه ولتاژ 28Vجریان مستقیم را به ولتاژ 115Vجریان متناوب تبدیل میکند برای راه اندازی آلات دقیق اصلی پروازی که با ولتاژ 11BACکار میکنند تأمین میشود.قدرت الکتریکی هواپیما درهنگام stand by
بودن محدود است زیرا که قدرت باتری ها محدود است.پس از هردوره استفاده از باتری های هواپیما آنهابوسیله نیروی الکتریکی داخل خود هواپیما ویا منبع خارجی شارژ میشود.
منابع نیرو Power Sources
منابع نیروی الکتریکی عبارتند از: ژنراتورهای جریان متناوب موتور گرد،
Generators) engine driven AC ) دستگاه قدرت کمکی (auxiliary power unit) ،منبع قدرت خارجی external power، وژنراتورهایی که با هوای برخورداری کارمیکنند.
ramair driven genenerators
هرکدام از موتورهای هواپیمای یک جت مسافربری بزرگ یک ژنرانراتورجریان متناوب رامیچرخاند
این ژنراتورها تأمین کننده نرمال قدرت برای تمامی هواپیما میباشد.دستگاه قدرت کمکی یاAPUدر
هنگام پروازبه عنوان پشتیبان منبع قدرت اصلی بکار میرود.(دراین مورد یک استثنا وجود دارد که در مورد هواپیمایB727 است که APU این هواپیما تنها برروی زمین کار می کند
GroundPowerunit
قدرت خارجی برروی زمین وازطریق یک دستگاه قدرت زمینی ایجاد میشود.
GPUها دارای انواع ثابت ومتحرک می باشد که به طورمعمول جریان متناوب را ازطریق یک دوشاخه خارجی که در قسمت دماغه هواپیما وصل میشود به هواپیما منتقل میکنند.
ازیک توربین که با هوای برخوردی کارمیکند به عنوان منبع تأمین قدرت درمواقع اضطراری که هم ژنراتورهای اصلی و هم APU از کار میافتد ،ااستفاده میشود.این توربین نیز جریان متناوب تولید میکند.از باتریهای نیکل کادمیم میتوان به عنوان منبع تأمین قدرت در مواقع اضطراری و یا درهنگامstand by بودن سیستم استفاده کرد.باتریها ولتاژ28DC را بطورمستقیم تأمین میکنند وولتاژ 115V با فرکانس400HZ را با استفاده ازstatic inverter ایجاد میکنند.
اجزای سیستم
وظیفه اساسی و بنیادی اجزای سیستم الکتریکی عبارتند از:تولید قدرت الکتریکی،کنترل قدرت الکتریکی،محافظت از سیستم الکتریکی و توزیع قدرت الکتریکی در سرتاسر هواپیما.ژنراتورهای هواپیما(موتور گرد و APU ) انرژی مکانیکی را با استفاده از constant speed drive)) به انرژی الکتریکی تبدیل می کنند.سرعت چرخش ژنراتورنشاندهنده فرکانس خروجی ژنراتور است و از آنجاییکه بیشتر اجزای الکترونیکی هواپیما با فرکانس400HZ کار میکنند،دور و یا سرعت چرخش ژنراتور باید ثابت باشد. constant speed drive با موتور میچرخد و با بکارگیری یک دیفرانسیل و پمپ های هیدرولیکی ژنراتوررا با سرعت ثابت می چرخاند.
Transformer Rectifier Unit
دستگاه یکسوکننده مبدل ها(TRV) برای تبدیل ولتاژ115V متناوب با فرکانس400HZ به ولتاژ جریان مستقیم28 ولت بکار می رود.برای انجام این کارTRU نیاز به یک مبدل دارد تا ولتاژ115 ولت را به 28ولت کاهش دهد یکسو کننده نیز جریان متناوب را به جریان مستقیم تبدیل میکند.معمولا ً هر یک از ترمینالهای جریان متناوب هر هواپیمایی یکTRU را تغذیه میکند که هر کدام ازTRUها یک ترمینال جریان مستقیم را تغذیه میکند.هر دو جریانهای مستقیم و متناوب در هنگام پرواز بوسیله هواپیما استفاده میشود.
هرکدام از ژنراتورهادارای یک کنترل کننده ولتاژ و یا دستگاه کنترل ژنراتورgenerator control unit میباشد.
CSD:که با بکارگیری آن ژنراتور با سرعت ثابت می چرخد.
مجموعه چرخ دنده ای است.که ولتاژ خروجی ژنراتور را کنترل میکند.مدار محافظ ژنراتور پارامترهای مختلف سیستم الکتریکی از قبیل ولتاژ،فرکانس،overcurrent،undercurrentو همچنین درصد خطاdiffrential fault را در دستگاه نشان دهنده نمایان میکند.دستگاههای کنترلload(میزان مصرف مصرف کننده ها)،load واقعی را حس میکند و برای کنترل فرکانس به CSD سیگنال میفرستد.مبدل های جریان برای حس کردنload جریان بکار میرود و برای محافظت diffrential fault بکار می رود.صفحه آلات دقیق سیستم الکتریکی هواپیما هم می تواند در بالای سر خلبان قرارگیرد و یا در قسمت مهندس پرواز قرار گیرد که بستگی به نوع هواپیما متفاوت است.
External Power Operation
برق سه فاز115ولت جریان متناوب با فرکانس 400هرتز بوسیله 2 منبع قدرت خارجی از طریق مخازن قدرت خارجی برای این هواپیمای غول پیکر تأمین میشود.پیش از اتصال برق به سیستم های هواپیما 2 دستگاه کنترل ترمینال(bus control unit) آنرا تست میکنند.
دستگاه BCU قرارگیری صحیص Plug ها ،میزان ولتاژ فرکانس وتغییر فاز را تست میکند و پس از انجام این تست ها و این دستگاه چراغ AVAIL را در صفحه آلات دقیق سیستم الکتریکی در کابین خلبان روشن میکند .
در صفحه آلات دقیق سیستم الکتریکی 2 کلید فشاری با نام هایEXT PWR 1 و 2 EXT PWR وجود دارد. با فشارEXT PWR،BCU شماره یک سیگنالی مبنی بر بستن external power control را دریافت میکند.اگر کلید EXT PWR2 فشرده شود Split sys breaker(در صورتی که هیچ برقی در ترمینال سینکرو نباشد)بسته می گردد. پس از انجام کارهای بالا برق هواپیما از طریق منبع خارجی تأمین میشود.
APU Power
برق سه فاز 115 ولت جریان متناوب فرکانس 400 هرتز بوسیله ژنراتورهای APU ایجاد میشود.پیش از اتصال برق به سیستم هواپیما 2 دستگاه کنترل ژنراتورکمکی(Auxiliary generator control units) برق تولیدی APU را برای اطمینان از ولتاژ و فرکانس صحیح تست می کنند.پس از اتمام تست برق تولیدی APU، این دستگاه ها 2 چراغ AVAIL ژنراتورAPUرا در صفحه آلات دقیق سیستم الکتریکی در کابین خلبان روشن می کند. با بستن این2 سوئیچ هواپیما اجازه می یابد که برق خود را از طریق ژنراتورهایAPU دریافت کند.
Integrated Drive Generator
بخش ژنراتور موتور گرد سیستم تولید قدرت موتورهواپیما به همراه اجزا مکانیکی و سیستم خنک کننده میباشد.بخش چرخ دنده ثابت کننده سرعت constant speed drive یک وسیله هیدرومکانیکی است.این وسیله با اضافه یا کم کردن سرعت از خروجی متغیر جعبه دنده موتور دور ژنراتور موتورگرد را در RPM 1200 دور ثابت نگه میدارد. از روغن ژنراتور موتور گرد برای کنترل سرعت،روغنکاری وخنک کاری استفاده میشود.گرمایی که بوسیله IDG ایجاد می شود با گذراندن روغن از یک مبدل حرارتی روغن/هوا و یا عبور سوخت از طرف آن خنک می شود. چهار دستگاه کنترل ژنراتور برای کنترل،محافظت وتست داخلی تجهیزات الکتریکی برای هر کدام از ژنراتورها بکارمیرود.
دستگاه کنترل ژنراتور دما وفشار روغن و سیگنال های سرعت ژنراتور موتور گرد را مطابق شکل 14-4 دریافت میکند. این دستگاه دستوراتی را برای سرعت ژنراتور موتورگرد و همچنین سیگنال هائی برای کنترل دریچه مبدل حرارتی ارسال میکند.
اساسا سه نوع متفاوت از ترکیب بندی سیستم های الکتریکی برای هواپیماهای بزرگ مسافربری استفاده می شود:نوع موازی Parallel،Split bus،Splitparallel
دلیل استفاده از برق 400 هرتز در هواپیما
در طراحی هواپیما مهندسین می بایست یکسری توافقات را به منظور موازنه بهینه در خصوص راه حل ها در نظر بگیرند که گاهی ممکن است بین یکی با دیگری تناقض بوجود آید. یک مثال خوب در این رابطه سیستم الکتریکی هواپیماست. کوچک وسبک تر شدن منابع تغذیه مزیت استفاده از سیستم برق 400هرتز به جای 60 هرتزمی باشد. داخل هواپیما که محدودیت جا وجود دارد این یک مزیت بسیارمهم بشمار می آید و کاهش وزن به منظور حصول حداکثر کارایی الزامی است. با این حال برای کاهش وزن بهایی باید پرداخت وآن بهره وری کمتر سیستم های الکتریکی فزکانس بالاست. حال اجازه دهید برای درک بهتر اهمیت موازنه در طراحی وارد مبحث سیستم های الکتریکی هواپیما شویم. هواپیماهای اولیه بدلیل اینکه فاقد تجهیزاتی بودند که مصرف کننده برق باشند نیازی به الکتریسیته نداشتند. تغییرات از دهه سوم قرن معاصر میلادی که هواپیماها مجهز به رادیوها وتجهیزات ناوبری که با جریانDCباطریها تغذیه می شدند شروع شد. پیشرفت های بعدی باعث شد ژنراتورهای کوچکی که توان DC(معمولا” 28 ولت ) تولید می کردند بکار گرفته شود. امروزه بجز هواپیماهای کوچک معمولی تمایلی به استفاده از سیستم های الکتریکی یکسویه وجود ندارد.همزمان با عصر ظهور موتورهای جت ، هواپیماها بصورت چشمگیری پیچیده شدند و طیف گسترده ای از تجهیزات الکتریکی بکار گرفته شد. هواپیما های مدرن نظامی با رادارهای قدرتمند ، حسگرها، تسلیحات ، ونمایشگرهای مدرن داخل کاکپیت تجهیز شده اند که برای کار نیاز به مقدار زیادی الکتریسیته دارند. هواپیماهای تجاری نیز برای سیستم های تهویه ، آشپزخانه ، نمایشگر های کاکپیت ، تجهیزات ارتباط رادیویی ، رادارهای هواشناسی و سیستم های سرگرمی داخل پرواز نیاز به توان الکتریکی دارند. منابع تغذیه DCجوابگوی نیازهای الکتریکی جهت تجهیزات عملیات پرواز ، راه اندازی ، تجهیزات گرمایی ، تجهیزات اویونیک ، چراغ های روشنایی داخل وخارج در هواپیماهای بزرگ نمی باشند.
این هواپیماها در عوض سیستم های الکتریکی AC را بکار می گیرند که معمولا” برق 115 ولت با فرکانس 400 هرتز تولید می کند. هواپیماها به تعدادی از سیستم های تولید الکتریسیته ، شامل هردوسیستم اصلی وجایگزین به منظور تغذیه بدون وقفه تجهیزات حیاتی در شرایط اضطراری مجهز هستند . توان اصلی) (mainمعمولا” توسط ژنراتورهای ACکه مستقیما” به موتورهای JETمتصل هستند فراهم می شود. هواپیماهای تجاری و بعضی از هواپیماهای نظامی به یک واحد تغذیه کمکی به نام APU (auxiliary power unit) مجهز هستند که اساسا” یک موتور جت کوچک است که از آن به عنوان یک منبع اضافی تولید توان استفاده می گردد. APU همیشه در حال کار و مکمل منبع تغذیه اصلی وهمچنین جایگزین آن در مواقع از دست دادن موتور می باشد.
APU
چنانچه APU هم از دست برود ، بسیاری از هواپیماها به یک منبع تغذیه دیگری به نام RAT (ram air turbine)که می تواند هنگام نیاز وارد عمل شود مجهز هستند. RAT در مواقع اضطراری برای تولید توان کافی به منظور پرواز هواپیما تا جایی که بتواند فرود امنی داشته باشد مورد استفاده قرار می گیرد. بنابراین RAT مانندAPUعمل می نماید. با این تفاوت که APU اساسا” یک موتور جت کوچک می باشد که برای تولید توان پشتیبان از همان سوخت معمول JETاستفاده می نماید ، ولی RATاز یک موتور ملخی تشکیل شده است که با جریان هوایی که از سرعت حرکت هواپیما تولید می شود می چرخد. این ملخ گردان ، توان لازم برای حرکت یک توربین را فراهم می نماید تا الکتریسیته ضروری که برای فعال نگه داشتن سیستم های حیاتی هواپیما مانند هیدرولیک ، تجهیزات کنترل پرواز وهمچنین دستگاههای کلیدی خودکار هواپیما(avionic)نیاز است را تولید کند. در شرایط عادی پرواز کل این مجموعه به داخل بدنه یا بال های هواپیما تا شده و مخفی می گردد.
RAT
ژنراتورهای هواپیما که با استفاده از یک آلترناتور، برق 115 ولت در فرکانس 400 هرتز تولید می کنند توان AC مورد نیاز را فراهم می نمایند. مزیت آلترناتورهای فرکانس بالا نیاز آن به حلقه های مسی کمتر برای تولید جریان الکتریکی مورد نیاز می باشد.این کاهش در مواد تشکیل دهنده به آلترناتورها اجازه می دهد تا ضمن کوچک شدن وزن وفضای کمتری را به خود اختصاص دهند.پس فهمیدیم RAT:
توربین کوچیکی است که معمولا به پمپ هیدرولیک یا مولد الکتریکی متصل میباشد و به عنوان منبع تولید انرژی مورد استفاده قرار میگیرد.دربرخی ازهواپیماهای امروزی Ratهای کوچکی به صورت مداوم نصب می شوند و یک مولد الکتریکی کوچک راه اندازی می کنند. این توربین که معمولا در زیر هواپیما نصب شده است دارای چندین پره بوده که در صورت از دست رفتن موتور های هواپیمای در حال پرواز (که با چرخش خود به عنوان منبع تامین نیرو های الکتریکی و هیدرولیکی استفاده می گردند) به صورت خودکار و یا دستی از بدنه هواپیما بیرون آمده و پس از برخورد با جریان هوای عبوری، با سرعت آغاز به گردش می کند. این چرخش باعث به وجود آمدن نیروهای لازم الکتریکی وهیدرولیکی شده که تا حدودی می توانند جای نیروهای تولید شده توسط موتورهای هواپیما را که اکنون از دست رفتهاند بگیرد، لذا آلات دقیق و ابزار حیاتی مورد استفاده توسط خلبانان و همچنین سیستم های رادیویی مورد نیاز جهت مکالمه با ایستگاه های زمینی مجدداً برقرار میگردند
گرچه فرکانس کاری قریب به اتفاق شبکه های توزیع برق 50 یا 60 هرتز می باشد با این وجود هواپیماهای بزرگ به طور معمول از سیستم های قدرت با فرکانس 400 هرتز بهره می گیرند. مطابق با یک قاعده مرسوم در طراحی هواپیما با کاهش یک پوند از وزن طراحی در واقع حداقل 5 پوند از وزن نهایی هواپیما کاسته می شود. دلیل این امر کاهش سوخت وهمچنین سبک تر شدن ساختار بدنه هواپیما برای حمل سوخت کمتر تا رسیدن به مقصد می باشد. از آنجایی که کاهش وزن ودر نتیجه کاهش هزینه های یک هواپیما اهمیت بسزایی دارد ، استفاده از ژنراتورهای الکتریکی سبک وکوچک 400 هرتز ، یک مزیت مهم در مقایسه با سیستم های 50 یا 60 هرتز به شمار می رود. با توجه به اینکه توان با ولتاژ متناسب است (P = VI)و طبق فرمول : Vl = L di/dt در یک میدان مغناطیسی با در نظر گرفتن قانون القای فاراده چنانچه فرکانس افزایش یابد ، dtکاهش یافته (f=1/t) یعنی سرعت قطع شار مغناطیسی توسط هادی بالارفته در نتیجه کاهش جریانی که به دلیل کاهش وزن سیم پیچ وهسته رخ می دهد را جبران می نماید پس برای داشتن یک توان ثابت ، با کاهش dt ، diنیز باید کاهش یابد واین بدان معنی است که جریان کمتری مورد نیاز است تا همان مقدار توان حاصل شود ودر نتیجه به میدان مغناطیسی که با هسته وسیم پیچ های کمتری ایجاد شده نیاز خواهد بود. واین یعنی کاهش وزن بنابراین ظرفیت ترابری هواپیما افزایش میابد.
حال به معایب کار در فرکانس 400 هرتز می پردازیم ، اشکال کار در فرکانس 400 هرتز این است که سیستم های فرکانس بالا دچار افت ولتاژ می شوند. مهمترین این افت ها از افت راکتیو نتیجه می شود. تلفات به دو دلیل یک طول هادی و دیگری فرکانس داخل هادی می باشد. با افزایش فرکانس افت ولتاز بیشتری اتفاق می افتد. در فرکانس 400 هرتز افت راکتیو می تواند تا هفت برابر بزرگتر از فرکانس 60 هرتز باشد .
این اختلاف به فهم اینکه چرا درشبکه های توزیع برق ازفرکانس 60هرتز به جای 400 هرتز داخل هواپیما استفاده می شود کمک می کند. فرکانس پائین تر افت توان را در مسافت های طولانی کاهش می دهد. طول هواپیما در مقایسه با ابعاد شبکه توزیع دلیل خوبی است که از افت ناشی از فرکانس 400 هرتز در مقایسه با مزیت دیگر آن بطور کامل چشم پوشی کنیم. در پایان به این نکته نیز باید توجه نمود که با توجه به مزیت فرکانس بالا برای استفاده در هواپیما چرا از فرکانس های بالاتر از 400 هرتز استفاده نمی گردد تا سیستم های الکتریکی داخل هواپیما فوق العاده سبکتر شود ، دلیل آن این است که فرکانس 400 هرتز بهینه بوده و در صورت بکارگیری فرکانس های بیشتر از آن ، مدارات شروع به تشعشع می نمایند که خود باعث ایجاد اختلال در عملکرد سیستم های الکترونیکی خواهد شد.
برق تجهیزات اویونیک باید تمیز باشد تا اطمینان حاصل شود که هیچ ضربه یا فرورفتگی وجود ندارد که باعث خرابی اویونیک شود، زیرا ممکن است منجر به اعلام اضطراری غیرقابل اجتناب شود.
سیستم های انرژی اویونیک و سرنشین دو سیستم کاملاً متفاوت هستند. سیستم قدرت ابزار 28 ولت درست از منبع بیرون کشیده می شود،
ابزارهای پرواز در 777 عمدتاً با 28 ولت DC تغذیه می شوند. برق جریان مستقیم توسط واحدهای ترانسفورماتور یکسو کننده سه فاز تامین می شود. چهار واحد از این قبیل وجود دارد که هر کدام دارای 120 آمپر هستند.
این درست از خروجی ژنراتور/آلترناتور هواپیما خارج می شود. همه چیز، از Cessna 152 کلاسیک شما تا 777، دینام/ژنراتورهای خود را با تنظیم کنندههای ولتاژ و فیوزها تنظیم میکنند تا در برابر اضافه بارهای فعلی محافظت کنند. این چیزها در کنار هم برای محافظت از سیستم های اویونیک و قدرت داخلی هواپیما کار می کنند. سیستم 28VDC برای سیستم های اویونیک نیز به سیستم باتری متصل می شود که در صورتی که ژنراتورها در خروجی کافی برق مشکل داشته باشند یا با هم خاموش شوند، از افت آن جلوگیری می کند.
بقیه هواپیما توسط سیستم 110/200 ولت 400 هرتز تغذیه می شود.
سیستم الکتریکی اولیه یک سیستم 3 فاز، 4 سیم با فرکانس ثابت 400 هرتز، 115/200 ولت است که از زمان بوئینگ 707 استاندارد صنعتی در حمل و نقل جت های تجاری بوده است.
جالب اینجاست که 400 هرتز است، من هنوز به دنبال این هستم که ببینم چگونه آن را به 60 هرتز برسانند.
از آنجایی که هواپیما در حال حاضر برق تمیزی را برای تجهیزات اویونیک فراهم میکند، نیرویی که از ترانسفورماتورها برای کاهش آن به 110 ولت و 60 هرتز برای پریزها میآید نیز باید بسیار تمیز باشد.
قدرت کاملاً "تمیز" است اما شما در اینجا چند فرض نادرست دارید. قدرت واقعاً کنار گذاشته نشده است. این چیزی است که در شبکه برق رخ می دهد زیرا اکثر خطوط برق در خیابان ولتاژ قابل توجهی بالاتری نسبت به آنچه در دوشاخه های خانه خود دارید حمل می کنند. در این مورد، ما لوکس انتخاب یک سیستم دینام/ژنراتور را داریم که نزدیک به (به احتمال زیاد کمی بالاتر) ولتاژ مورد نیاز ما باشد. اسلاید 4 از این ارائه از بوئینگ به این واقعیت اشاره دارد که سیستم 115 ولت خروجی می دهد (و احتمالاً شرطی شده است) و سپس به کابین و همچنین باس 28 ولت DC تقسیم می شود. برق از ترانسفورماتورها خارج نمی شود، از ژنراتور/آلترناتورها خارج می شود، سپس در صورت نیاز شرطی شده و تبدیل می شود. پایداری با نرمکنندهها و تنظیمکنندههای متعدد به دست میآید،
سوئیچ اصلی باتری چگونه کنتاکتور باتری را در سسنا 152 فعال می کند؟درس طراحی هواپیما و کارگاه هواپیما
من معتقدم که کنتاکتور باتری یک رله است که در هنگام تغذیه کنتاکت چپ، کنتاکت های بالا و راست را به هم متصل می کند.
در ابتدا، تمام کلیدها خاموش هستند، دینام نمی چرخد و فشار روغن وجود ندارد:
کنتاکت سمت چپ کنتاکتور باتری از طریق کلید اصلی باتری در حالت خاموش به زمین متصل می شود.
کنتاکتور باتری تغذیه نمی شود. باتری را از اتصال از طریق آمپرمتر به گذرگاه اصلی جدا می کند.
ولتاژ باتری فقط به ساعت و سوئیچ فشار روغن توزیع می شود.
دو دیود نزدیک به کنتاکتور باتری در بایاس معکوس هستند و بنابراین رسانا نیستند.
وقتی سوئیچ اصلی باتری را به حالت روشن تغییر میدهم، انتظار دارم که کنتاکتور باتری در حال بستن کنتاکت باشد و باتری را از طریق آمپرمتر به گذرگاه اصلی وصل کند.
که نیاز به برق در کنتاکت سمت چپ کنتاکتور باتری دارد.
سوئیچ اصلی باتری این کنتاکت را (از طریق قطع کننده مدار میدان دینام و بریکر Pull off ALT) به باس اصلی متصل می کند.
اتوبوس اصلی هنوز روشن نشده است.
به روشی که من این شماتیک رو خوندم کنتاکتور باتری فعال نمیشه. هیچ اتفاقی نمی افتد.
چه چیزی را از دست داده ام؟تصویر زیر از سیستم الکتریکی C152 را ببینید.
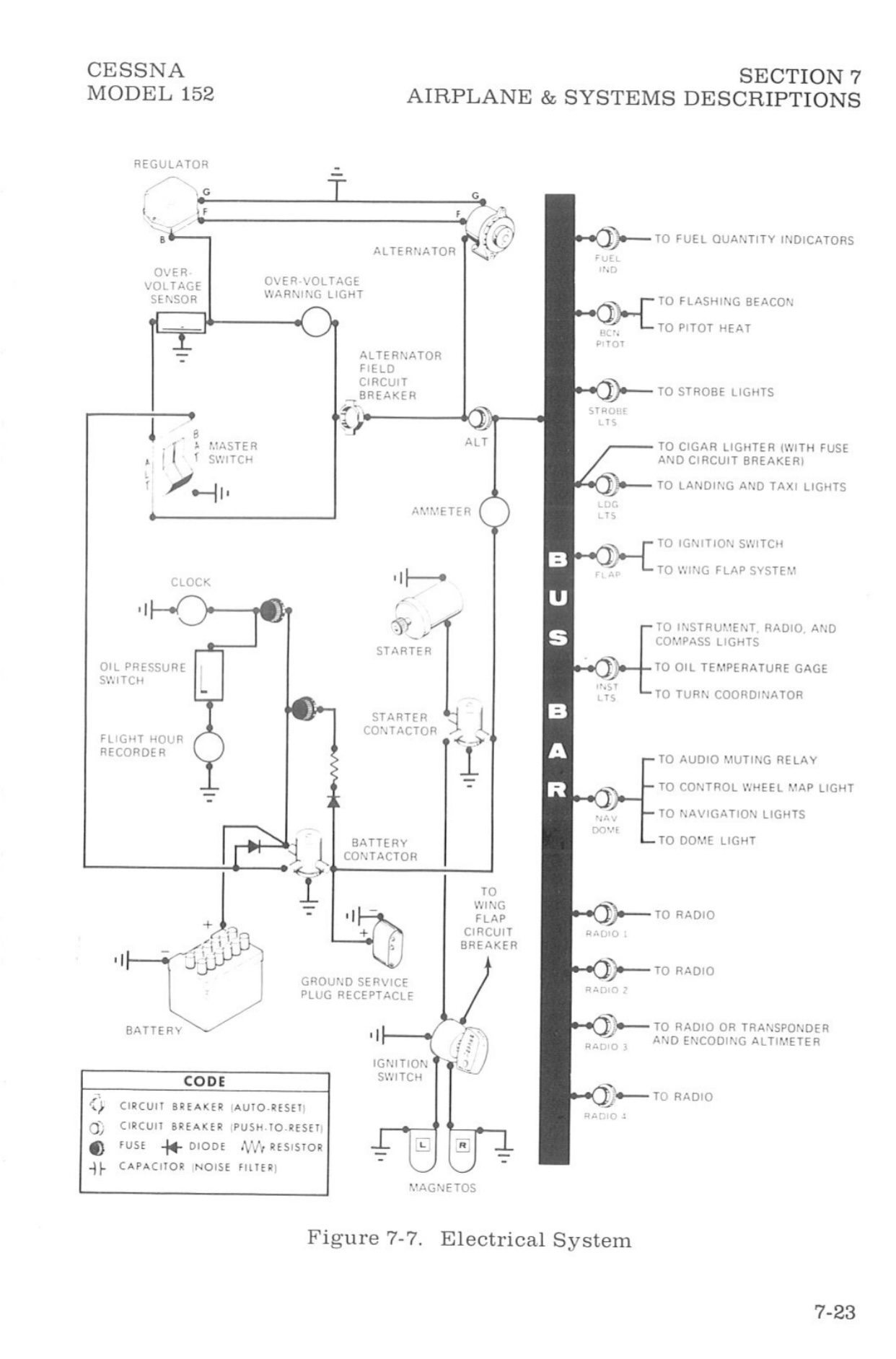
کنتاکتور باتری یک رله کنترلشده برقی است. باتری مستقیماً به ترمینال ورودی کنتاکتور متصل می شود و این ترمینال و ترمینال سوئیچ BATT روی کنتاکتور تا زمانی که باتری شارژ می شود از نظر الکتریکی گرم می مانند. هنگامی که کلید BATT MASTER روشن می شود، این یک مسیر از ترمینال ورودی داغ کنتاکتور به زمین فراهم می کند و باعث می شود جریان از باتری، از طریق شیر برقی کنتاکتور و به زمین (مسیر زرد) جریان یابد.
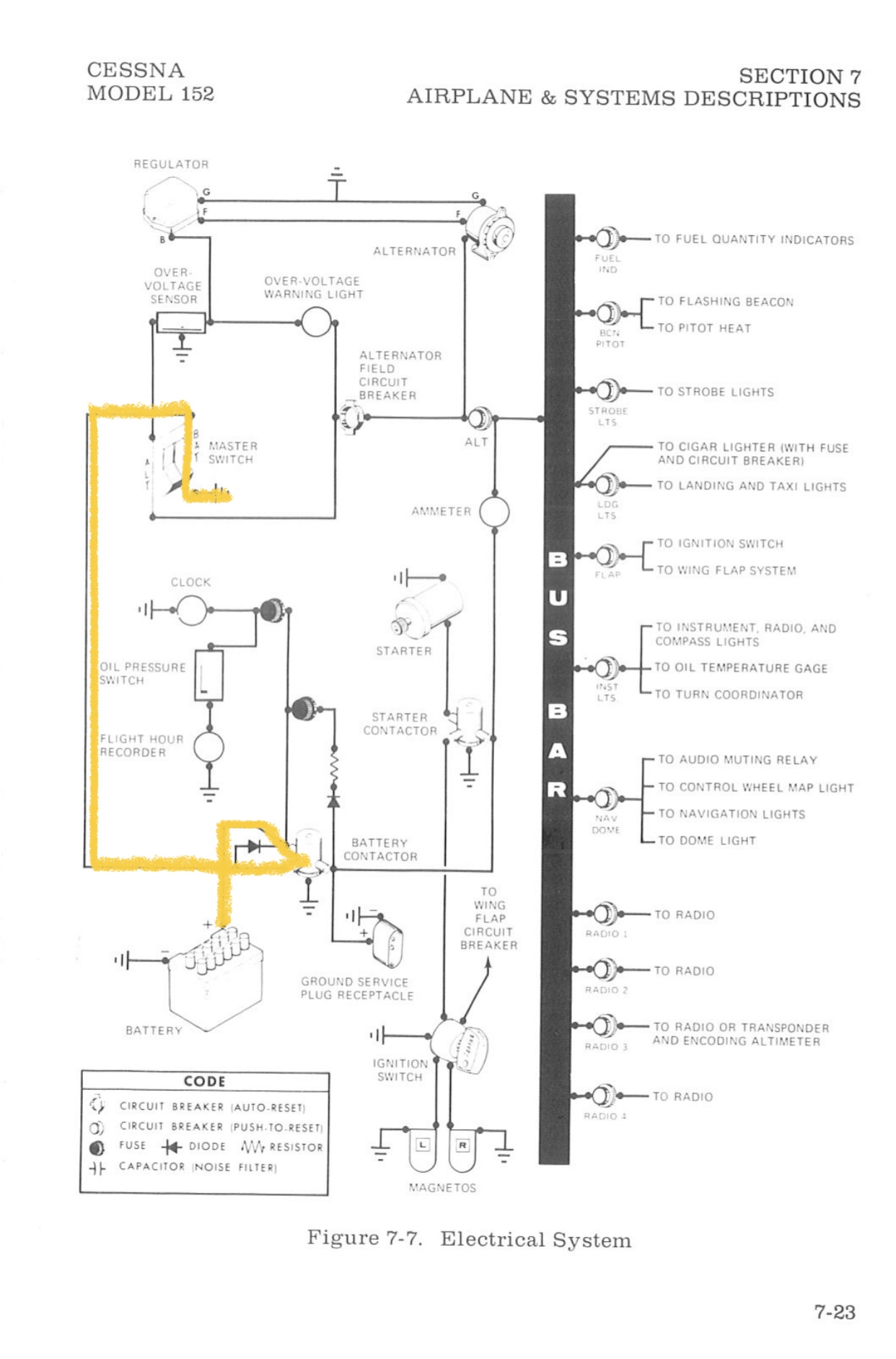
شیر برقی پرانرژی شده بین ترمینال ورودی و میله باس اصلی و آن تماس برقرار می کند و به سیستم الکتریکی هواپیما (مسیر آبی) انرژی می دهد.
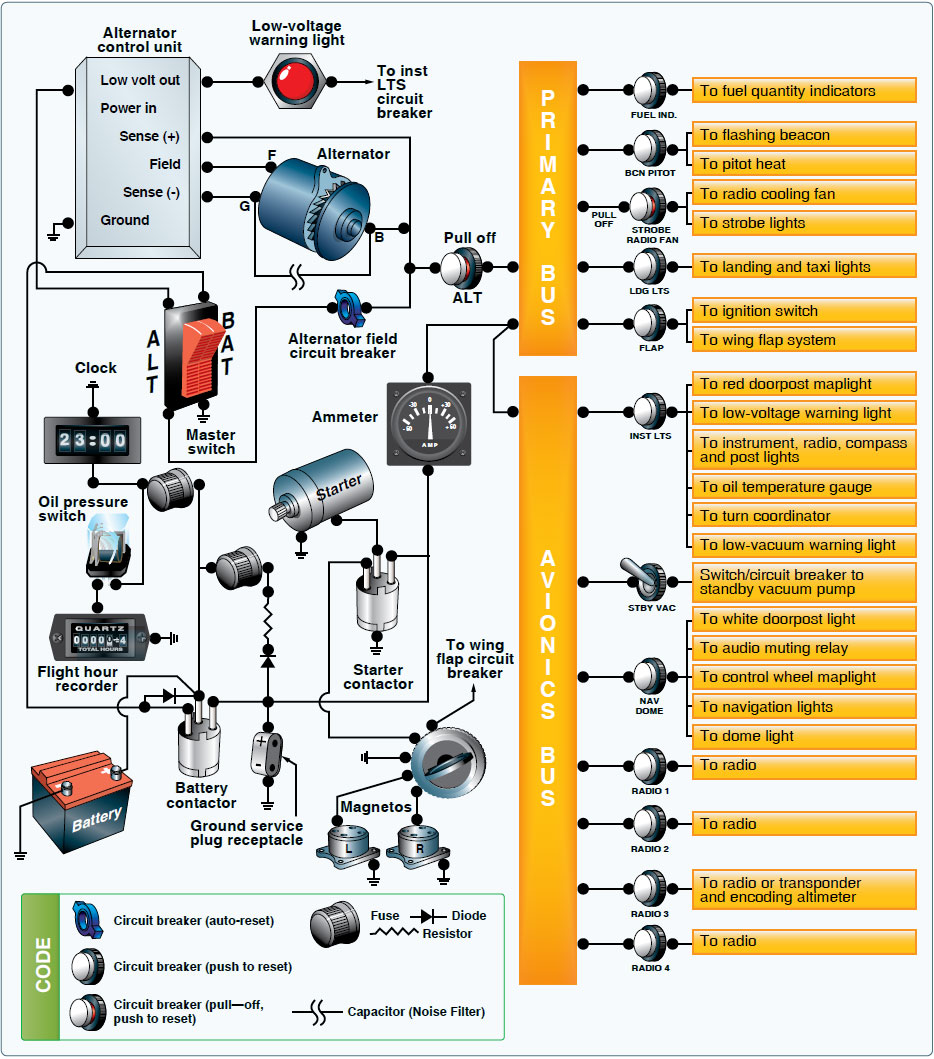
جریان از باتری نیز از طریق آمپرمتر به نوار باس عبور می کند، که نشان دهنده نرخ جریان از تخلیه باتری یا شارژ باتری ارائه شده توسط دینام است.
اگر سوئیچ ALT برق نداشته باشد، سنسور اضافه ولتاژ به زمین متصل می شود، در نتیجه از تامین برق توسط رگولاتور به سیم پیچ میدان دینام و دینام از تولید برق برای تغذیه به اتوبوس جلوگیری می شود (مسیر بنفش).
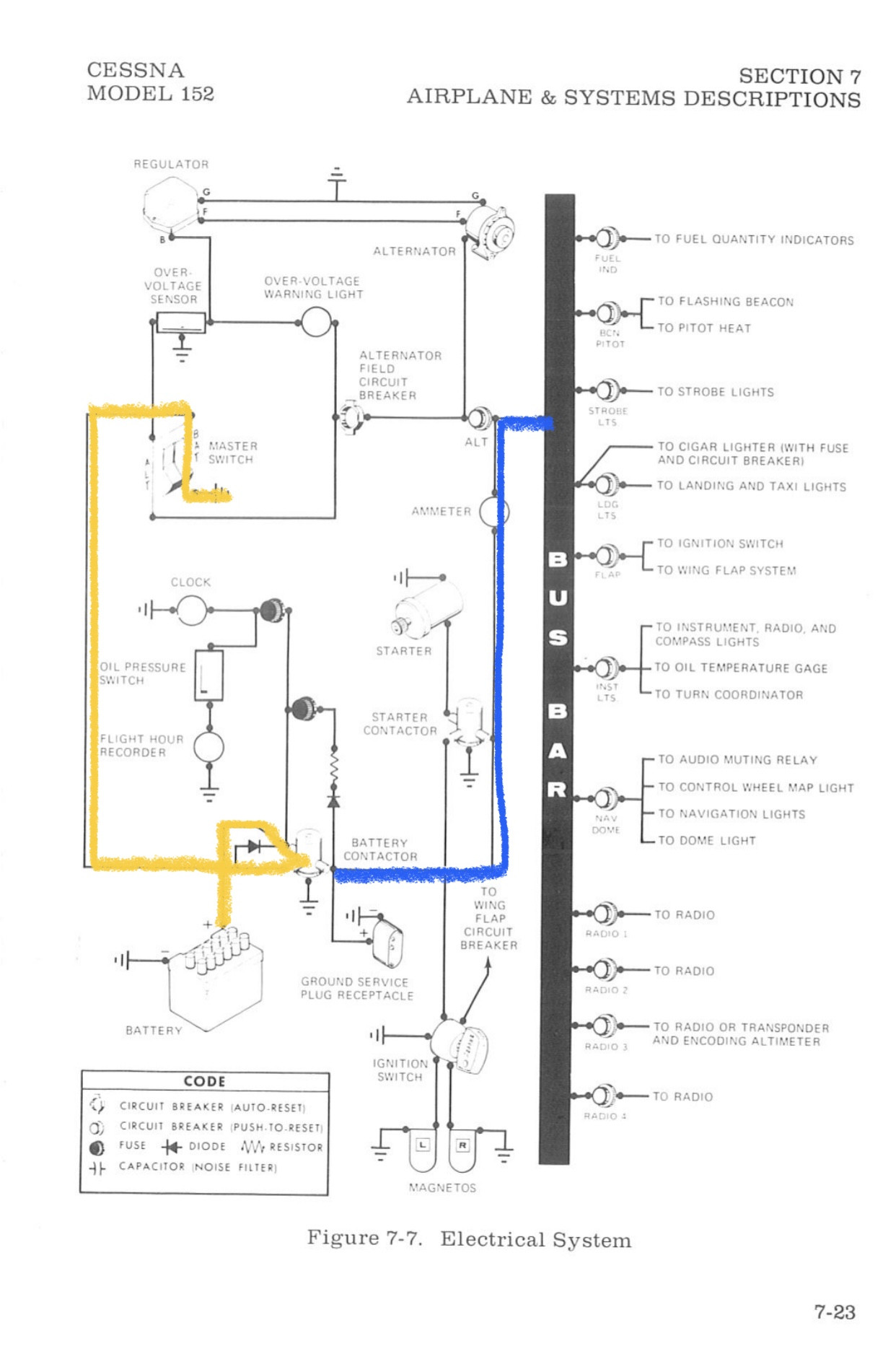
این باعث می شود چراغ OVER VOLTAGE روشن شود، که نشان می دهد دینام یا برای سیستم الکتریکی هواپیما برق تولید نمی کند یا سیستم الکتریکی با ولتاژ غیر طبیعی کار می کند.
جریان ورودی به باس اصلی از دینام نیز ممکن است با استفاده از قطع کننده مدار ALT قطع شود.
اگر سوئیچ ALT روشن باشد، سنسور اضافه ولتاژ به زمین متصل نباشد، نیروی باتری به رگولاتور تامین می شود که به نوبه خود سیم پیچ میدان دینام (مسیر نارنجی) را انرژی می دهد، در نتیجه به دینام اجازه می دهد با ولتاژی بیشتر از باتری برق تولید کند. مسیر سبز) هنگامی که موتور آن را به حرکت در می آورد.
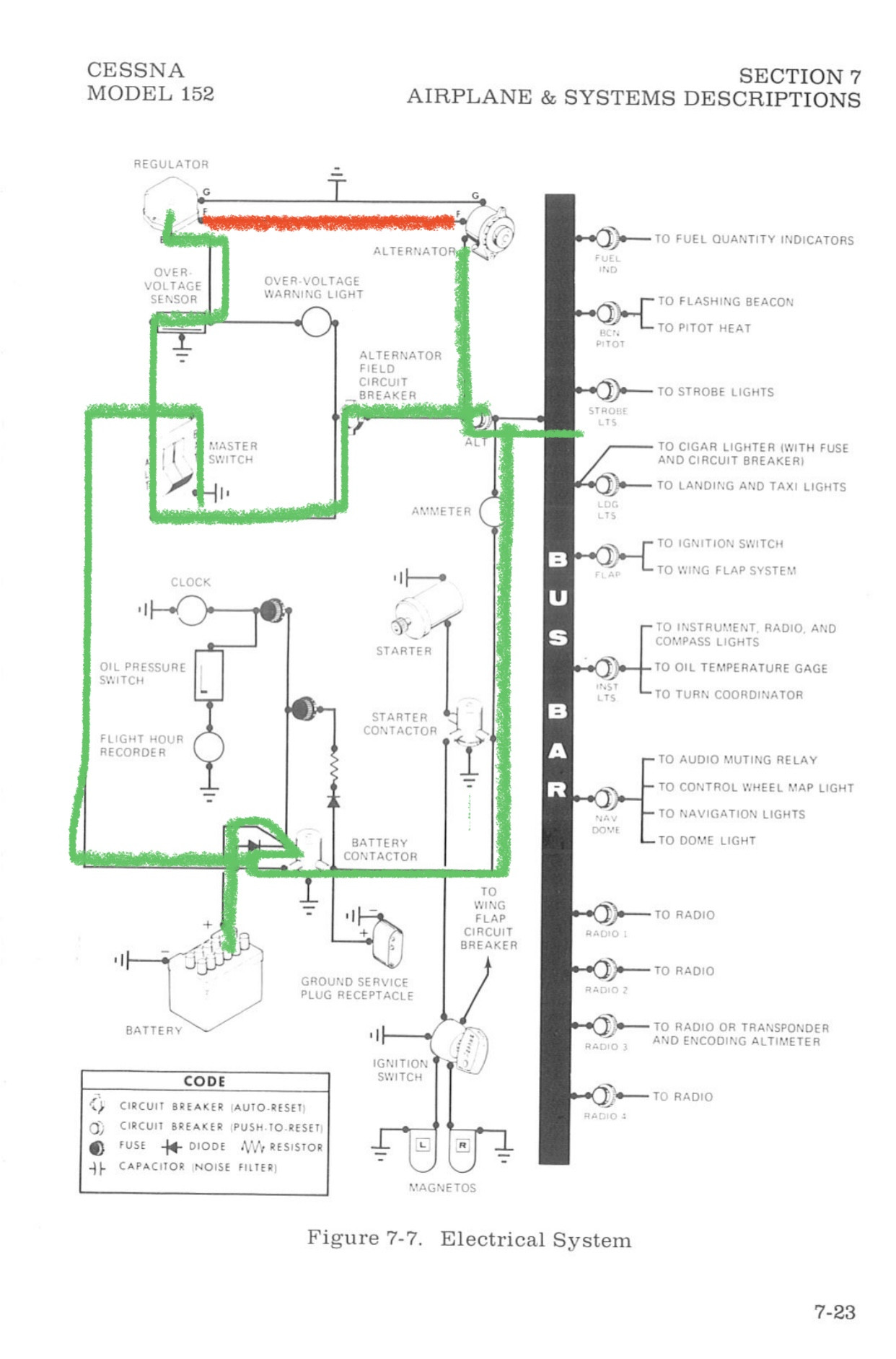
دیود نصب شده بین دو کنتاکت روی کنتاکتور باتری به دینام اجازه می دهد تا باتری را در حین کارکرد موتور شارژ کند.
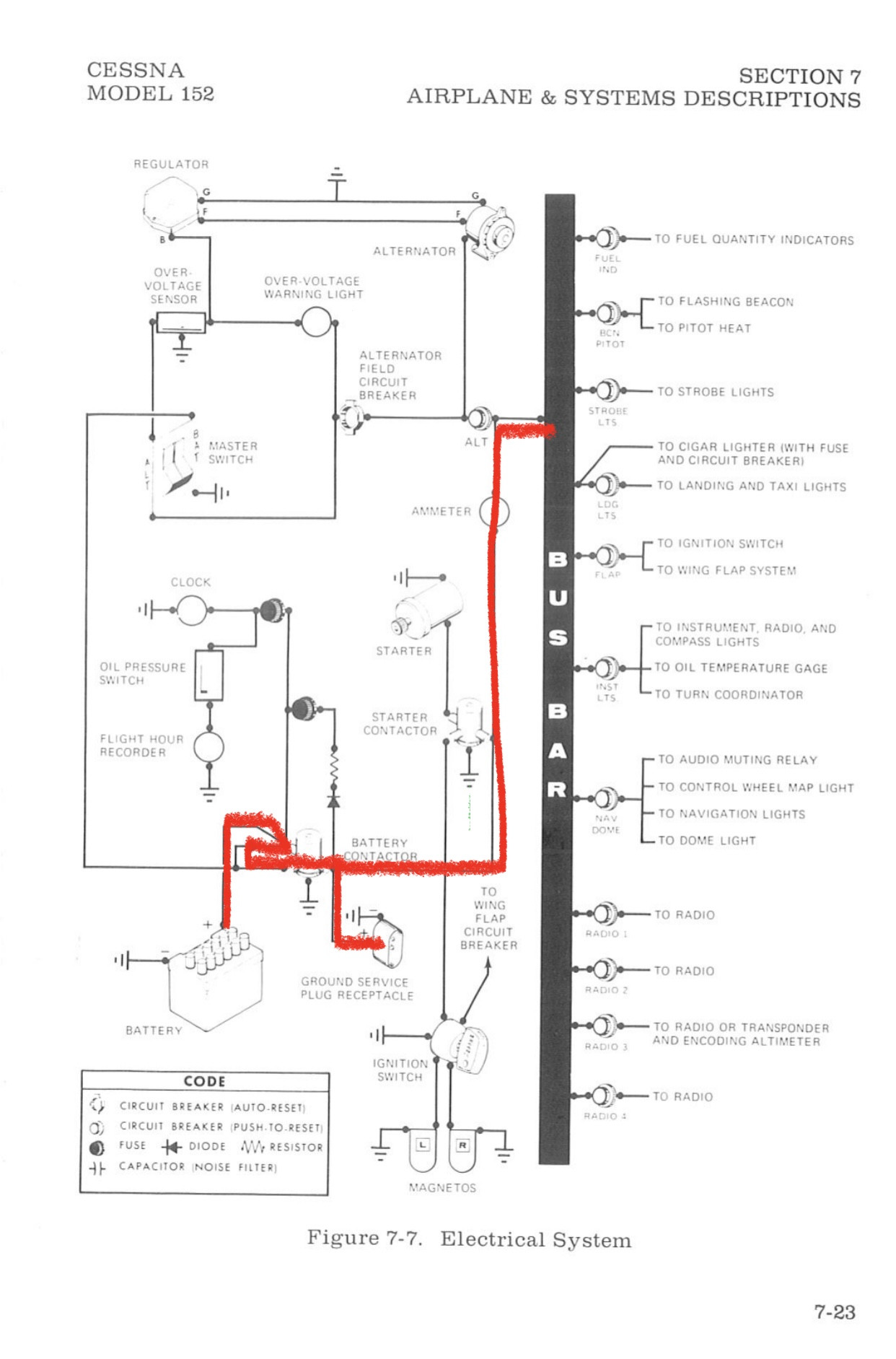
از طرف دیگر، هم اتوبوس برقی و هم شارژ باتری هواپیما را می توان با اتصال دوشاخه برق خارجی به سوکت برق خارجی کولر گازی (مسیر قرمز) کار کرد.
عموما هواپیما از برق 115 ولت AC و 28 ولت DC استفاده می کنه. برق AC توسط دو سیستم تولید موتور محرک تامین می شود.ایرباس از 28 ولت DC استفاده می کند، عمدتاً برای چیزهایی مانند سنسورها و غیره، بنابراین مصرف کلی برق در سیستم DC بسیار کم است: به عنوان مثال، A350 دارای 4 واحد یکسو کننده ترانسفورماتور (TRU) است که AC را به DC تبدیل می کند. 2 مورد از آنها به عنوان "عادی" و 2 به عنوان "اورژانس" تعیین شده اند. هر کدام دارای توان اسمی حدود 300 وات هستند. کل استفاده از سیستم DC حدود 500 وات است. . متاسفانه من از بوئینگ اطلاعی زیادی ندارم.
به نظر می رسه که بوئینگ از 28 ولت DC نیز استفاده می کند - که منطقی است، من انتظار دارم ایرباس از 28 ولت DC در A300 استفاده کند، همانطور که در آن زمان استاندارد بود، و تا به امروز از آن استفاده کرده است.بیشتر هواپیماهای مسافربری ازهردو جریان مستقیم(DC)وجریان متناوب(AC)استفاده میکنند.گرچه ولتاژهای متفاوتی درهواپیماهای موجود استفاده میشود ولی بیشترهواپیمای بزرگ مسافربری ازجریان مستقیم با ولتاژ28V وجریان متناوب سه فازبا ولتاژ115V و فرکانس 400HZ برای تأمین نیازهواپیما استفاده میکنند.
با به کارگیری دستگاه یک سوکننده ها ransformer Rectifier Unit که ولتاژمتناوب115V را به ولتاژ28V جریان مستقیم تبدیل میکند،ترمینالهای جریان مستقیم واجزای سیستم جریان مستقیم از طریق ژنراتورهای جریان متناوب تأمین میشود.در بعضی هواپیماها ولتاژ 115V متناوب به ولتاژ26V متناوب تبدیل وبرای مدارهای روشنایی بکار می رود.
در مواقع اضطراری که ژنراتور الکتریکی بطور کامل ازکارمی افتد ویا در هنگام stand by بودن سیستم،قدرت مورد نیازسیستم های الکتریکی والکترونیکی هواپیما ازطریق باتری های داخل هواپیما که دارای ولتاژ28V جریان مستقیم هستند،تأمین میشود.قدرت اصلی برای جریان متناوب درهنگام stand by بودن سیستم از طریق وسیله ای بنام static inverterکه ولتاژ 28Vجریان مستقیم را به ولتاژ 115Vجریان متناوب تبدیل میکند برای راه اندازی آلات دقیق اصلی پروازی که با ولتاژ 11BACکار میکنند تأمین میشود.قدرت الکتریکی هواپیما درهنگام stand by
بودن محدود است زیرا که قدرت باتری ها محدود است.پس از هردوره استفاده از باتری های هواپیما آنهابوسیله نیروی الکتریکی داخل خود هواپیما ویا منبع خارجی شارژ میشود.
منابع نیرو Power Sources
منابع نیروی الکتریکی عبارتند از: ژنراتورهای جریان متناوب موتور گرد،
Generators) engine driven AC ) دستگاه قدرت کمکی (auxiliary power unit) ،منبع قدرت خارجی external power، وژنراتورهایی که با هوای برخورداری کارمیکنند.
ramair driven genenerators
هرکدام از موتورهای هواپیمای یک جت مسافربری بزرگ یک ژنرانراتورجریان متناوب رامیچرخاند
این ژنراتورها تأمین کننده نرمال قدرت برای تمامی هواپیما میباشد.دستگاه قدرت کمکی یاAPUدر
هنگام پروازبه عنوان پشتیبان منبع قدرت اصلی بکار میرود.(دراین مورد یک استثنا وجود دارد که در مورد هواپیمایB727 است که APU این هواپیما تنها برروی زمین کار می کند
GroundPowerunit
قدرت خارجی برروی زمین وازطریق یک دستگاه قدرت زمینی ایجاد میشود.
GPUها دارای انواع ثابت ومتحرک می باشد که به طورمعمول جریان متناوب را ازطریق یک دوشاخه خارجی که در قسمت دماغه هواپیما وصل میشود به هواپیما منتقل میکنند.
ازیک توربین که با هوای برخوردی کارمیکند به عنوان منبع تأمین قدرت درمواقع اضطراری که هم ژنراتورهای اصلی و هم APU از کار میافتد ،ااستفاده میشود.این توربین نیز جریان متناوب تولید میکند.از باتریهای نیکل کادمیم میتوان به عنوان منبع تأمین قدرت در مواقع اضطراری و یا درهنگامstand by بودن سیستم استفاده کرد.باتریها ولتاژ28DC را بطورمستقیم تأمین میکنند وولتاژ 115V با فرکانس400HZ را با استفاده ازstatic inverter ایجاد میکنند.
اجزای سیستم
وظیفه اساسی و بنیادی اجزای سیستم الکتریکی عبارتند از:تولید قدرت الکتریکی،کنترل قدرت الکتریکی،محافظت از سیستم الکتریکی و توزیع قدرت الکتریکی در سرتاسر هواپیما.ژنراتورهای هواپیما(موتور گرد و APU ) انرژی مکانیکی را با استفاده از constant speed drive)) به انرژی الکتریکی تبدیل می کنند.سرعت چرخش ژنراتورنشاندهنده فرکانس خروجی ژنراتور است و از آنجاییکه بیشتر اجزای الکترونیکی هواپیما با فرکانس400HZ کار میکنند،دور و یا سرعت چرخش ژنراتور باید ثابت باشد. constant speed drive با موتور میچرخد و با بکارگیری یک دیفرانسیل و پمپ های هیدرولیکی ژنراتوررا با سرعت ثابت می چرخاند.
Transformer Rectifier Unit
دستگاه یکسوکننده مبدل ها(TRV) برای تبدیل ولتاژ115V متناوب با فرکانس400HZ به ولتاژ جریان مستقیم28 ولت بکار می رود.برای انجام این کارTRU نیاز به یک مبدل دارد تا ولتاژ115 ولت را به 28ولت کاهش دهد یکسو کننده نیز جریان متناوب را به جریان مستقیم تبدیل میکند.معمولا ً هر یک از ترمینالهای جریان متناوب هر هواپیمایی یکTRU را تغذیه میکند که هر کدام ازTRUها یک ترمینال جریان مستقیم را تغذیه میکند.هر دو جریانهای مستقیم و متناوب در هنگام پرواز بوسیله هواپیما استفاده میشود.
هرکدام از ژنراتورهادارای یک کنترل کننده ولتاژ و یا دستگاه کنترل ژنراتورgenerator control unit میباشد.
CSD:که با بکارگیری آن ژنراتور با سرعت ثابت می چرخد.
مجموعه چرخ دنده ای است.که ولتاژ خروجی ژنراتور را کنترل میکند.مدار محافظ ژنراتور پارامترهای مختلف سیستم الکتریکی از قبیل ولتاژ،فرکانس،overcurrent،undercurrentو همچنین درصد خطاdiffrential fault را در دستگاه نشان دهنده نمایان میکند.دستگاههای کنترلload(میزان مصرف مصرف کننده ها)،load واقعی را حس میکند و برای کنترل فرکانس به CSD سیگنال میفرستد.مبدل های جریان برای حس کردنload جریان بکار میرود و برای محافظت diffrential fault بکار می رود.صفحه آلات دقیق سیستم الکتریکی هواپیما هم می تواند در بالای سر خلبان قرارگیرد و یا در قسمت مهندس پرواز قرار گیرد که بستگی به نوع هواپیما متفاوت است.
External Power Operation
برق سه فاز115ولت جریان متناوب با فرکانس 400هرتز بوسیله 2 منبع قدرت خارجی از طریق مخازن قدرت خارجی برای این هواپیمای غول پیکر تأمین میشود.پیش از اتصال برق به سیستم های هواپیما 2 دستگاه کنترل ترمینال(bus control unit) آنرا تست میکنند.
دستگاه BCU قرارگیری صحیص Plug ها ،میزان ولتاژ فرکانس وتغییر فاز را تست میکند و پس از انجام این تست ها و این دستگاه چراغ AVAIL را در صفحه آلات دقیق سیستم الکتریکی در کابین خلبان روشن میکند .
در صفحه آلات دقیق سیستم الکتریکی 2 کلید فشاری با نام هایEXT PWR 1 و 2 EXT PWR وجود دارد. با فشارEXT PWR،BCU شماره یک سیگنالی مبنی بر بستن external power control را دریافت میکند.اگر کلید EXT PWR2 فشرده شود Split sys breaker(در صورتی که هیچ برقی در ترمینال سینکرو نباشد)بسته می گردد. پس از انجام کارهای بالا برق هواپیما از طریق منبع خارجی تأمین میشود.
APU Power
برق سه فاز 115 ولت جریان متناوب فرکانس 400 هرتز بوسیله ژنراتورهای APU ایجاد میشود.پیش از اتصال برق به سیستم هواپیما 2 دستگاه کنترل ژنراتورکمکی(Auxiliary generator control units) برق تولیدی APU را برای اطمینان از ولتاژ و فرکانس صحیح تست می کنند.پس از اتمام تست برق تولیدی APU، این دستگاه ها 2 چراغ AVAIL ژنراتورAPUرا در صفحه آلات دقیق سیستم الکتریکی در کابین خلبان روشن می کند. با بستن این2 سوئیچ هواپیما اجازه می یابد که برق خود را از طریق ژنراتورهایAPU دریافت کند.
Integrated Drive Generator
بخش ژنراتور موتور گرد سیستم تولید قدرت موتورهواپیما به همراه اجزا مکانیکی و سیستم خنک کننده میباشد.بخش چرخ دنده ثابت کننده سرعت constant speed drive یک وسیله هیدرومکانیکی است.این وسیله با اضافه یا کم کردن سرعت از خروجی متغیر جعبه دنده موتور دور ژنراتور موتورگرد را در RPM 1200 دور ثابت نگه میدارد. از روغن ژنراتور موتور گرد برای کنترل سرعت،روغنکاری وخنک کاری استفاده میشود.گرمایی که بوسیله IDG ایجاد می شود با گذراندن روغن از یک مبدل حرارتی روغن/هوا و یا عبور سوخت از طرف آن خنک می شود. چهار دستگاه کنترل ژنراتور برای کنترل،محافظت وتست داخلی تجهیزات الکتریکی برای هر کدام از ژنراتورها بکارمیرود.
دستگاه کنترل ژنراتور دما وفشار روغن و سیگنال های سرعت ژنراتور موتور گرد را مطابق شکل 14-4 دریافت میکند. این دستگاه دستوراتی را برای سرعت ژنراتور موتورگرد و همچنین سیگنال هائی برای کنترل دریچه مبدل حرارتی ارسال میکند.
اساسا سه نوع متفاوت از ترکیب بندی سیستم های الکتریکی برای هواپیماهای بزرگ مسافربری استفاده می شود:نوع موازی Parallel،Split bus،Splitparallel
دلیل استفاده از برق 400 هرتز در هواپیما
در طراحی هواپیما مهندسین می بایست یکسری توافقات را به منظور موازنه بهینه در خصوص راه حل ها در نظر بگیرند که گاهی ممکن است بین یکی با دیگری تناقض بوجود آید. یک مثال خوب در این رابطه سیستم الکتریکی هواپیماست. کوچک وسبک تر شدن منابع تغذیه مزیت استفاده از سیستم برق 400هرتز به جای 60 هرتزمی باشد. داخل هواپیما که محدودیت جا وجود دارد این یک مزیت بسیارمهم بشمار می آید و کاهش وزن به منظور حصول حداکثر کارایی الزامی است. با این حال برای کاهش وزن بهایی باید پرداخت وآن بهره وری کمتر سیستم های الکتریکی فزکانس بالاست. حال اجازه دهید برای درک بهتر اهمیت موازنه در طراحی وارد مبحث سیستم های الکتریکی هواپیما شویم. هواپیماهای اولیه بدلیل اینکه فاقد تجهیزاتی بودند که مصرف کننده برق باشند نیازی به الکتریسیته نداشتند. تغییرات از دهه سوم قرن معاصر میلادی که هواپیماها مجهز به رادیوها وتجهیزات ناوبری که با جریانDCباطریها تغذیه می شدند شروع شد. پیشرفت های بعدی باعث شد ژنراتورهای کوچکی که توان DC(معمولا” 28 ولت ) تولید می کردند بکار گرفته شود. امروزه بجز هواپیماهای کوچک معمولی تمایلی به استفاده از سیستم های الکتریکی یکسویه وجود ندارد.همزمان با عصر ظهور موتورهای جت ، هواپیماها بصورت چشمگیری پیچیده شدند و طیف گسترده ای از تجهیزات الکتریکی بکار گرفته شد. هواپیما های مدرن نظامی با رادارهای قدرتمند ، حسگرها، تسلیحات ، ونمایشگرهای مدرن داخل کاکپیت تجهیز شده اند که برای کار نیاز به مقدار زیادی الکتریسیته دارند. هواپیماهای تجاری نیز برای سیستم های تهویه ، آشپزخانه ، نمایشگر های کاکپیت ، تجهیزات ارتباط رادیویی ، رادارهای هواشناسی و سیستم های سرگرمی داخل پرواز نیاز به توان الکتریکی دارند. منابع تغذیه DCجوابگوی نیازهای الکتریکی جهت تجهیزات عملیات پرواز ، راه اندازی ، تجهیزات گرمایی ، تجهیزات اویونیک ، چراغ های روشنایی داخل وخارج در هواپیماهای بزرگ نمی باشند.
این هواپیماها در عوض سیستم های الکتریکی AC را بکار می گیرند که معمولا” برق 115 ولت با فرکانس 400 هرتز تولید می کند. هواپیماها به تعدادی از سیستم های تولید الکتریسیته ، شامل هردوسیستم اصلی وجایگزین به منظور تغذیه بدون وقفه تجهیزات حیاتی در شرایط اضطراری مجهز هستند . توان اصلی) (mainمعمولا” توسط ژنراتورهای ACکه مستقیما” به موتورهای JETمتصل هستند فراهم می شود. هواپیماهای تجاری و بعضی از هواپیماهای نظامی به یک واحد تغذیه کمکی به نام APU (auxiliary power unit) مجهز هستند که اساسا” یک موتور جت کوچک است که از آن به عنوان یک منبع اضافی تولید توان استفاده می گردد. APU همیشه در حال کار و مکمل منبع تغذیه اصلی وهمچنین جایگزین آن در مواقع از دست دادن موتور می باشد.
APU
چنانچه APU هم از دست برود ، بسیاری از هواپیماها به یک منبع تغذیه دیگری به نام RAT (ram air turbine)که می تواند هنگام نیاز وارد عمل شود مجهز هستند. RAT در مواقع اضطراری برای تولید توان کافی به منظور پرواز هواپیما تا جایی که بتواند فرود امنی داشته باشد مورد استفاده قرار می گیرد. بنابراین RAT مانندAPUعمل می نماید. با این تفاوت که APU اساسا” یک موتور جت کوچک می باشد که برای تولید توان پشتیبان از همان سوخت معمول JETاستفاده می نماید ، ولی RATاز یک موتور ملخی تشکیل شده است که با جریان هوایی که از سرعت حرکت هواپیما تولید می شود می چرخد. این ملخ گردان ، توان لازم برای حرکت یک توربین را فراهم می نماید تا الکتریسیته ضروری که برای فعال نگه داشتن سیستم های حیاتی هواپیما مانند هیدرولیک ، تجهیزات کنترل پرواز وهمچنین دستگاههای کلیدی خودکار هواپیما(avionic)نیاز است را تولید کند. در شرایط عادی پرواز کل این مجموعه به داخل بدنه یا بال های هواپیما تا شده و مخفی می گردد.
RAT
ژنراتورهای هواپیما که با استفاده از یک آلترناتور، برق 115 ولت در فرکانس 400 هرتز تولید می کنند توان AC مورد نیاز را فراهم می نمایند. مزیت آلترناتورهای فرکانس بالا نیاز آن به حلقه های مسی کمتر برای تولید جریان الکتریکی مورد نیاز می باشد.این کاهش در مواد تشکیل دهنده به آلترناتورها اجازه می دهد تا ضمن کوچک شدن وزن وفضای کمتری را به خود اختصاص دهند.پس فهمیدیم RAT:
توربین کوچیکی است که معمولا به پمپ هیدرولیک یا مولد الکتریکی متصل میباشد و به عنوان منبع تولید انرژی مورد استفاده قرار میگیرد.دربرخی ازهواپیماهای امروزی Ratهای کوچکی به صورت مداوم نصب می شوند و یک مولد الکتریکی کوچک راه اندازی می کنند. این توربین که معمولا در زیر هواپیما نصب شده است دارای چندین پره بوده که در صورت از دست رفتن موتور های هواپیمای در حال پرواز (که با چرخش خود به عنوان منبع تامین نیرو های الکتریکی و هیدرولیکی استفاده می گردند) به صورت خودکار و یا دستی از بدنه هواپیما بیرون آمده و پس از برخورد با جریان هوای عبوری، با سرعت آغاز به گردش می کند. این چرخش باعث به وجود آمدن نیروهای لازم الکتریکی وهیدرولیکی شده که تا حدودی می توانند جای نیروهای تولید شده توسط موتورهای هواپیما را که اکنون از دست رفتهاند بگیرد، لذا آلات دقیق و ابزار حیاتی مورد استفاده توسط خلبانان و همچنین سیستم های رادیویی مورد نیاز جهت مکالمه با ایستگاه های زمینی مجدداً برقرار میگردند
گرچه فرکانس کاری قریب به اتفاق شبکه های توزیع برق 50 یا 60 هرتز می باشد با این وجود هواپیماهای بزرگ به طور معمول از سیستم های قدرت با فرکانس 400 هرتز بهره می گیرند. مطابق با یک قاعده مرسوم در طراحی هواپیما با کاهش یک پوند از وزن طراحی در واقع حداقل 5 پوند از وزن نهایی هواپیما کاسته می شود. دلیل این امر کاهش سوخت وهمچنین سبک تر شدن ساختار بدنه هواپیما برای حمل سوخت کمتر تا رسیدن به مقصد می باشد. از آنجایی که کاهش وزن ودر نتیجه کاهش هزینه های یک هواپیما اهمیت بسزایی دارد ، استفاده از ژنراتورهای الکتریکی سبک وکوچک 400 هرتز ، یک مزیت مهم در مقایسه با سیستم های 50 یا 60 هرتز به شمار می رود. با توجه به اینکه توان با ولتاژ متناسب است (P = VI)و طبق فرمول : Vl = L di/dt در یک میدان مغناطیسی با در نظر گرفتن قانون القای فاراده چنانچه فرکانس افزایش یابد ، dtکاهش یافته (f=1/t) یعنی سرعت قطع شار مغناطیسی توسط هادی بالارفته در نتیجه کاهش جریانی که به دلیل کاهش وزن سیم پیچ وهسته رخ می دهد را جبران می نماید پس برای داشتن یک توان ثابت ، با کاهش dt ، diنیز باید کاهش یابد واین بدان معنی است که جریان کمتری مورد نیاز است تا همان مقدار توان حاصل شود ودر نتیجه به میدان مغناطیسی که با هسته وسیم پیچ های کمتری ایجاد شده نیاز خواهد بود. واین یعنی کاهش وزن بنابراین ظرفیت ترابری هواپیما افزایش میابد.
حال به معایب کار در فرکانس 400 هرتز می پردازیم ، اشکال کار در فرکانس 400 هرتز این است که سیستم های فرکانس بالا دچار افت ولتاژ می شوند. مهمترین این افت ها از افت راکتیو نتیجه می شود. تلفات به دو دلیل یک طول هادی و دیگری فرکانس داخل هادی می باشد. با افزایش فرکانس افت ولتاز بیشتری اتفاق می افتد. در فرکانس 400 هرتز افت راکتیو می تواند تا هفت برابر بزرگتر از فرکانس 60 هرتز باشد .
این اختلاف به فهم اینکه چرا درشبکه های توزیع برق ازفرکانس 60هرتز به جای 400 هرتز داخل هواپیما استفاده می شود کمک می کند. فرکانس پائین تر افت توان را در مسافت های طولانی کاهش می دهد. طول هواپیما در مقایسه با ابعاد شبکه توزیع دلیل خوبی است که از افت ناشی از فرکانس 400 هرتز در مقایسه با مزیت دیگر آن بطور کامل چشم پوشی کنیم. در پایان به این نکته نیز باید توجه نمود که با توجه به مزیت فرکانس بالا برای استفاده در هواپیما چرا از فرکانس های بالاتر از 400 هرتز استفاده نمی گردد تا سیستم های الکتریکی داخل هواپیما فوق العاده سبکتر شود ، دلیل آن این است که فرکانس 400 هرتز بهینه بوده و در صورت بکارگیری فرکانس های بیشتر از آن ، مدارات شروع به تشعشع می نمایند که خود باعث ایجاد اختلال در عملکرد سیستم های الکترونیکی خواهد شد.
برق تجهیزات اویونیک باید تمیز باشد تا اطمینان حاصل شود که هیچ ضربه یا فرورفتگی وجود ندارد که باعث خرابی اویونیک شود، زیرا ممکن است منجر به اعلام اضطراری غیرقابل اجتناب شود.
سیستم های انرژی اویونیک و سرنشین دو سیستم کاملاً متفاوت هستند. سیستم قدرت ابزار 28 ولت درست از منبع بیرون کشیده می شود،
ابزارهای پرواز در 777 عمدتاً با 28 ولت DC تغذیه می شوند. برق جریان مستقیم توسط واحدهای ترانسفورماتور یکسو کننده سه فاز تامین می شود. چهار واحد از این قبیل وجود دارد که هر کدام دارای 120 آمپر هستند.
این درست از خروجی ژنراتور/آلترناتور هواپیما خارج می شود. همه چیز، از Cessna 152 کلاسیک شما تا 777، دینام/ژنراتورهای خود را با تنظیم کنندههای ولتاژ و فیوزها تنظیم میکنند تا در برابر اضافه بارهای فعلی محافظت کنند. این چیزها در کنار هم برای محافظت از سیستم های اویونیک و قدرت داخلی هواپیما کار می کنند. سیستم 28VDC برای سیستم های اویونیک نیز به سیستم باتری متصل می شود که در صورتی که ژنراتورها در خروجی کافی برق مشکل داشته باشند یا با هم خاموش شوند، از افت آن جلوگیری می کند.
بقیه هواپیما توسط سیستم 110/200 ولت 400 هرتز تغذیه می شود.
سیستم الکتریکی اولیه یک سیستم 3 فاز، 4 سیم با فرکانس ثابت 400 هرتز، 115/200 ولت است که از زمان بوئینگ 707 استاندارد صنعتی در حمل و نقل جت های تجاری بوده است.
جالب اینجاست که 400 هرتز است، من هنوز به دنبال این هستم که ببینم چگونه آن را به 60 هرتز برسانند.
از آنجایی که هواپیما در حال حاضر برق تمیزی را برای تجهیزات اویونیک فراهم میکند، نیرویی که از ترانسفورماتورها برای کاهش آن به 110 ولت و 60 هرتز برای پریزها میآید نیز باید بسیار تمیز باشد.
قدرت کاملاً "تمیز" است اما شما در اینجا چند فرض نادرست دارید. قدرت واقعاً کنار گذاشته نشده است. این چیزی است که در شبکه برق رخ می دهد زیرا اکثر خطوط برق در خیابان ولتاژ قابل توجهی بالاتری نسبت به آنچه در دوشاخه های خانه خود دارید حمل می کنند. در این مورد، ما لوکس انتخاب یک سیستم دینام/ژنراتور را داریم که نزدیک به (به احتمال زیاد کمی بالاتر) ولتاژ مورد نیاز ما باشد. اسلاید 4 از این ارائه از بوئینگ به این واقعیت اشاره دارد که سیستم 115 ولت خروجی می دهد (و احتمالاً شرطی شده است) و سپس به کابین و همچنین باس 28 ولت DC تقسیم می شود. برق از ترانسفورماتورها خارج نمی شود، از ژنراتور/آلترناتورها خارج می شود، سپس در صورت نیاز شرطی شده و تبدیل می شود. پایداری با نرمکنندهها و تنظیمکنندههای متعدد به دست میآید،
سوئیچ اصلی باتری چگونه کنتاکتور باتری را در سسنا 152 فعال می کند؟درس طراحی هواپیما و کارگاه هواپیما
من معتقدم که کنتاکتور باتری یک رله است که در هنگام تغذیه کنتاکت چپ، کنتاکت های بالا و راست را به هم متصل می کند.
در ابتدا، تمام کلیدها خاموش هستند، دینام نمی چرخد و فشار روغن وجود ندارد:
کنتاکت سمت چپ کنتاکتور باتری از طریق کلید اصلی باتری در حالت خاموش به زمین متصل می شود.
کنتاکتور باتری تغذیه نمی شود. باتری را از اتصال از طریق آمپرمتر به گذرگاه اصلی جدا می کند.
ولتاژ باتری فقط به ساعت و سوئیچ فشار روغن توزیع می شود.
دو دیود نزدیک به کنتاکتور باتری در بایاس معکوس هستند و بنابراین رسانا نیستند.
وقتی سوئیچ اصلی باتری را به حالت روشن تغییر میدهم، انتظار دارم که کنتاکتور باتری در حال بستن کنتاکت باشد و باتری را از طریق آمپرمتر به گذرگاه اصلی وصل کند.
که نیاز به برق در کنتاکت سمت چپ کنتاکتور باتری دارد.
سوئیچ اصلی باتری این کنتاکت را (از طریق قطع کننده مدار میدان دینام و بریکر Pull off ALT) به باس اصلی متصل می کند.
اتوبوس اصلی هنوز روشن نشده است.
به روشی که من این شماتیک رو خوندم کنتاکتور باتری فعال نمیشه. هیچ اتفاقی نمی افتد.
چه چیزی را از دست داده ام؟تصویر زیر از سیستم الکتریکی C152 را ببینید.
کنتاکتور باتری یک رله کنترلشده برقی است. باتری مستقیماً به ترمینال ورودی کنتاکتور متصل می شود و این ترمینال و ترمینال سوئیچ BATT روی کنتاکتور تا زمانی که باتری شارژ می شود از نظر الکتریکی گرم می مانند. هنگامی که کلید BATT MASTER روشن می شود، این یک مسیر از ترمینال ورودی داغ کنتاکتور به زمین فراهم می کند و باعث می شود جریان از باتری، از طریق شیر برقی کنتاکتور و به زمین (مسیر زرد) جریان یابد.
شیر برقی پرانرژی شده بین ترمینال ورودی و میله باس اصلی و آن تماس برقرار می کند و به سیستم الکتریکی هواپیما (مسیر آبی) انرژی می دهد.
جریان از باتری نیز از طریق آمپرمتر به نوار باس عبور می کند، که نشان دهنده نرخ جریان از تخلیه باتری یا شارژ باتری ارائه شده توسط دینام است.
اگر سوئیچ ALT برق نداشته باشد، سنسور اضافه ولتاژ به زمین متصل می شود، در نتیجه از تامین برق توسط رگولاتور به سیم پیچ میدان دینام و دینام از تولید برق برای تغذیه به اتوبوس جلوگیری می شود (مسیر بنفش).
این باعث می شود چراغ OVER VOLTAGE روشن شود، که نشان می دهد دینام یا برای سیستم الکتریکی هواپیما برق تولید نمی کند یا سیستم الکتریکی با ولتاژ غیر طبیعی کار می کند.
جریان ورودی به باس اصلی از دینام نیز ممکن است با استفاده از قطع کننده مدار ALT قطع شود.
اگر سوئیچ ALT روشن باشد، سنسور اضافه ولتاژ به زمین متصل نباشد، نیروی باتری به رگولاتور تامین می شود که به نوبه خود سیم پیچ میدان دینام (مسیر نارنجی) را انرژی می دهد، در نتیجه به دینام اجازه می دهد با ولتاژی بیشتر از باتری برق تولید کند. مسیر سبز) هنگامی که موتور آن را به حرکت در می آورد.
دیود نصب شده بین دو کنتاکت روی کنتاکتور باتری به دینام اجازه می دهد تا باتری را در حین کارکرد موتور شارژ کند.
از طرف دیگر، هم اتوبوس برقی و هم شارژ باتری هواپیما را می توان با اتصال دوشاخه برق خارجی به سوکت برق خارجی کولر گازی (مسیر قرمز) کار کرد.
-
rohamavation
نام: roham hesami radرهام حسامی راد
محل اقامت: 100 مایلی شمال لندن جاده آیلستون، لستر، لسترشر. LE2
عضویت : سهشنبه ۱۳۹۹/۸/۲۰ - ۰۸:۳۴
پست: 3286-
سپاس: 5494
- جنسیت:
تماس:
Re: هوافضا
عناصر اصلی تولید برق شامل باتری ها ، واحدهای قدرت کمکی (APU) ، ژنراتورهای متصل به موتور هواپیما و توربین هوایی قوسی (RAT) است که برای برق اضطراری استفاده می شود.یک سیستم الکتریکی هواپیما یک شبکه مستقل از اجزای تولید کننده ، انتقال ، توزیع ، استفاده و ذخیره انرژی الکتریکی است.
یک سیستم الکتریکی یک جزء لاینفک و ضروری در همه طرحها به جز ساده ترین طراحی هواپیما است. ظرفیت و پیچیدگی سیستم الکتریکی بین یک هواپیمای سبک تک پیستونی ، تک موتوره و یک هواپیمای جت تجاری مدرن و چند موتوره بسیار متفاوت است. با این حال ، سیستم الکتریکی هواپیماها در هر دو انتهای طیف پیچیدگی دارای بسیاری از اجزای اساسی مشابه است.
همه سیستم های الکتریکی هواپیما دارای قطعاتی با قابلیت تولید برق هستند. بسته به هواپیما ، از ژنراتورها یا دینام ها برای تولید برق استفاده می شود. این موتورها معمولاً با موتور کار می کنند ، اما ممکن است از APU ، موتور هیدرولیک یا توربین هوایی Ram (RAT) نیز استفاده کنند. خروجی ژنراتور معمولاً 115-120V/400HZ AC ، 28V DC یا 14V DC است. برق ژنراتور ممکن است بدون تغییر استفاده شود یا از طریق ترانسفورماتورها ، یکسو کننده ها یا اینورترها جهت تغییر ولتاژ یا نوع جریان هدایت شود.
خروجی ژنراتور معمولاً به یک یا چند گذر توزیع هدایت می شود. قطعات جداگانه از گذرگاه با محافظت از مدار به شکل یک قطع کننده مدار یا فیوز موجود در سیم کشی تغذیه می شوند.
خروجی ژنراتور برای شارژ باتری (های) هواپیما نیز استفاده می شود. باتری ها معمولاً از انواع سربی-اسیدی یا NICAD هستند ، اما باتری های لیتیومی روز به روز رایج تر می شوند. از آنها برای راه اندازی هواپیما و به عنوان منبع اضطراری نیرو در صورت خرابی سیستم تولید یا توزیع استفاده می شود.
سیستم های الکتریکی اولیه هواپیما
برخی از هواپیماهای تک موتوره بسیار ساده دارای سیستم برقی نیستند. موتور پیستون مجهز به سیستم جرقه زنی مگنتو است که خودکار تغذیه می شود و مخزن سوخت به گونه ای قرار گرفته است که موتور را به طور گرانشی تغذیه می کند. هواپیما با استفاده از یک چرخ دنده و میل لنگ یا با "حرکت دستی" موتور راه اندازی می شود.
اگر بخواهید یک استارت برقی ، چراغ ، ابزارهای برقی پرواز ، وسایل ناوبری یا رادیوها وجود داشته باشد ، یک سیستم الکتریکی به یک ضرورت تبدیل می شود. در بیشتر موارد ، سیستم با استفاده از یک گذرگاه توزیع ، یک باتری و یک ژنراتور یا دینام با موتور واحد تغذیه DC می کند. مقررات ، به شکل سوئیچ روشن/خاموش ، برای جدا کردن باتری از گذرگاه و جداسازی ژنراتور/دینام از گذرگاه در نظر گرفته می شود. یک آمپرمتر ، بار سنج یا چراغ هشدار نیز برای نشان دادن خرابی سیستم شارژ تعبیه شده است. قطعات الکتریکی به نوار باس متصل می شوند که از قطع کننده مدار یا فیوزهایی برای محافظت از مدار استفاده می کند. ممکن است مقرراتی در نظر گرفته شود که به منبع تغذیه خارجی مانند باتری اضافی یا واحد قدرت زمینی (GPU) متصل شود تا به استارت موتور کمک کند یا در حالی که موتور در حال کار نیست ، برق را تأمین کند.
سیستم های الکتریکی پیشرفته هواپیما
سیستم های الکتریکی پیچیده تر معمولاً سیستم های ولتاژ چندگانه هستند که از ترکیبی از اتوبوس های AC و DC برای تغذیه اجزای مختلف هواپیما استفاده می کنند. تولید برق اولیه معمولاً AC با یک یا چند واحد اصلاح کننده ترانسفورماتور (TRU) است که تبدیل ولتاژ DC را برای تغذیه اتوبوس های DC فراهم می کند. تولید AC ثانویه از APU معمولاً برای استفاده در زمین در مواقع کار نکردن موتورها و برای استفاده در هوا در صورت خرابی قطعات ارائه می شود. تولید درجه سوم به شکل موتور هیدرولیک یا RAT نیز ممکن است در سیستم گنجانده شود تا در صورت خرابی های متعدد ، افزونگی ایجاد شود. قطعات ضروری AC و DC به اتوبوس های خاص متصل می شوند و تقریباً در همه شرایط خرابی ، نیروهایی برای تأمین برق این اتوبوس ها در نظر گرفته شده است. در صورت از بین رفتن تمام توان AC ، اینورتر استاتیک در سیستم گنجانده شده است تا گذرگاه Essential AC از باتری های هواپیما تغذیه شود.
مقررات قوی نظارت و هشدار خرابی سیستم در سیستم الکتریکی گنجانده شده است و در صورت لزوم به خلبانان ارائه می شود. هشدارها ممکن است شامل خرابی/خرابی ژنراتور ، خرابی TRU ، خرابی باتری ، خرابی/خرابی گذرگاه و نظارت بر قطع کننده مدار باشد ، اما محدود به آن نمی شود. سازنده همچنین روشهای دقیق جداسازی سیستم الکتریکی را ارائه می دهد تا در صورت آتش سوزی الکتریکی مورد استفاده قرار گیرد.
مطابق با مقررات قابل اجرا ، قطعاتی مانند ابزارهای آماده به کار و روشنایی مسیرهای اضطراری هواپیما دارای منبع تغذیه پشتیبان خود هستند در حالی که ژنراتورها منبع اصلی نیروی هواپیما هستند ، چندین منبع تکمیلی در هواپیما برای افزونگی ضروری هستند ، بنابراین GE بر روی تعدادی از فناوری های جدید از جمله سلولهای سوختی ، خازنهای فوق العاده و پرانرژی کار می کند. لیتیوم یون با چگالی بالا ...نتیجه تصویر برای سیستم قدرت هواپیما
یک هواپیما شامل دو مدار اصلی الکتریکی و یک مدار متناوب است. دو مدار ، یکی در هر طرف هواپیما ، به یک ژنراتور متصل است. این ژنراتور است که با استفاده از انرژی مکانیکی تامین شده توسط یکی از موتورها ، برق تولید می کند. این همان چیزی است که ما آن را تولید برق می نامیم. آبان 18 ، 1394 AP
برق مورد نیاز سیستمهای هواپیما، معمولاً از یکی از دو منبع مستقل زیر تأمین می شود:
ژنراتور: معمولا به تعداد موتورهای هواپیما ژنراتورهایی متصل به اونها وجود دارد که برق مورد نیاز هواپیما را تأمین می کنند که البته این برق AC است.
باتری ها: که برق آنها DCهست و برق اضطراری هم به آنها وصل است.
این دو معمولا در تمامی هواپیماها وجود دارد و مشترک است که در زیر به توضیح آنها می پردازیم:
هواپیماهای برق مستقیم
در موتورهای این نوع هواپیماها ژنراتور برق مستقیم نصب شده است. در بیشتر موارد این ژنراتور نقش استارتر را نیز ایفا می کند، به این صورت که از طریق دستگاه برق 28 ولت زمینی که از بیرون به هواپیما وصل می شود یا توسط باطریهای هواپیما که دارای ولتاژ 24هستند می توان موتورها را استارت زده و روشن کرد، پس از روشن شدن موتور این استارتر به طور خودکار به ژنراتور تبدیل شده، نیروی الکتریکی مورد نیاز هواپیما را تامین می کند.
آشنایی با سیستم برق هواپیماها
ژنراتور سومی نیز به این ترمینال وصل می گردد که روی یک متور جت کوچک که معمولا در انتهای هواپیما قرار دارد نصب شده است. این موتور قادر است روی زمین برق هواپیما همچنین هوای لازم جهت تهویه هواپیما را تامین نماید، معمولا این موتور هنگام پرواز خاموش است ولی در صورت از دست رفتن ژنراتور اصلی هواپیما می تواند در پرواز نیز روشن و ژنراتور آن مورد استفاده قرار گیرد.این موتور APU نام دارد.
روی زمین می توان از دستگاه مولد زمینی 28 ولت نیز استفاده کرد که در این صورت نیازی به روشن کردن APU نبوده و باطری های هواپیما نیز مصرف نخواهند شد تا انرژی آنها جهت حالت اضطراری و همچنین ایستگاه هایی که مولد زمینی ندارند حفظ شود.
برق 28 ولت تولیدی از ترمینال اصلی به ترمینال های فرعی و از آن طریق به مصرف کننده ها داده می شود.
لازم به ذکر است برخی مصرف کننده های الکترونیکی نیاز به برق 115 ولت با فرکانس ثابت 400 هرتز دارند که برای تولید این برق از اینورتر استفاده می شود(اینورتر یک مبدل الکترونیکی است که برق 28 ولت مستقیم را به 115 ولت 400 هرتز تبدیل می کند). در شکل زیر اینورتر دیده می شود که یکی ترمینال سامانه های طرف خلبان و دیگری طرف کمک را تغذیه می نماید، در صورت از کار افتادن هریک از این اینورترها، اینورتر اضطراری را می توان جایگزین آن کرد که کلید تبدیل آن در شکل دیده می شود، روی زمین می توان دستگاه مولد 115 ولت 400 هرتز نیز به هواپیما وصل کرد که آن هم در سمت راست شکل دیده می شود.
هواپیماهای برق متناوب
آشنایی با سیستم برق هواپیماها
در این نوع هواپیماها از ژنراتورهای با خروجی 115 ولت 400 هرتز 3 فاز استفاده شده این هواپیما دو ژنراتور روی موتورها و ژنراتور سوم روی APU نصب شده که توسط سامانه کنترل خودکار ترمینال ها می توانند به ترمینال های مربوطه وصل شوند، ترمینال ها دارای سه فاز هستند که هر فاز به مصرف کننده مربوط خود متصل می شود. در این مثال در شرایط عادی ژنراتور شماره 1 ترمینال AC شماره 1 و همچنین ترمینال ضروری را تغذیه می کند و ژنراتور شماره 2 ترمینال AC شماره 2 را تغذیه می کند. ژنراتور شماره 3 نیز آماده است تا در صورت از کار افتادن هر یک از ژنراتورها به طور خودکار توسط سامانه کنترلی گفته شده جایگزین ژنراتور معیوب گردد، اصولا در شرایط عادی قبل از بلند شدن هواپیما، APU را خاموش می کنند، اگر از ژنراتور سوم به هر علتی نتوان استفاده نمود در صورت از کار افتادن هریک از ژنراتورها ژنراتور سالم به طور خودکار تمامی ترمینال ها را تغذیه خواهد نمود. هنگامی که هواپیما روی زمین باشد می توان از دستگاه مولد زمینی 115 ولت 400 هرتز 3 فاز استفاده نمود.
سیستمهای الکتریکی از نظر سرویسدهی به دو گروه اصلی و اضطراری و از نظر ولتاژ الکتریکی به دو گروه AC و DC دستهبندی میشوند.
ژنراتورهای اصلی هواپیما برق سه فاز ۱۱۵/۲۰۰ VAC را در فرکانس ۴۰۰ هرتز را تولید میکنند.
در صورت قطع توان ژنراتورهای اصلی، ژنراتورهای اضطراری که شامل واحد توان کمکی و باتریها هستند، وظیفه تأمین انرژی هواپیما را برعهده دارند.
برق جریان متناوب هواپیما در مواقع اضطراری از طریق ژنراتور APU تأمین میگردد.
این ژنراتور میتواند در حین پرواز جایگزین یک یا هردوی ژنراتورهای موتورگرد (اصلی) شود.
همچنین این ژنراتور در روی زمین هم در صورت نبودن منبع ولتاژ خارجی، برق هواپیما را تأمین میکند.
برق DC هواپیما توسط دو باتری تأمین میشود که هر کدام از آنها توان نامی ۲۳ آمپر ساعت دارند.
این منابع تغذیه اصولاً برای موارد راهاندازی APU در پرواز و در روی زمین و تغذیه شبکه DC/AC اضطراری استفاده میشوند.
دلیل استفاده از برق 400 هرتز در هواپیما
در طراحی هواپیما مهندسین می بایست یکسری توافقات را به منظور موازنه بهینه در خصوص راه حل ها در نظر بگیرند که گاهی ممکن است بین یکی با دیگری تناقض بوجود آید. یک مثال خوب در این رابطه سیستم الکتریکی هواپیماست. کوچک وسبک تر شدن منابع تغذیه مزیت استفاده از سیستم برق 400هرتز به جای 60 هرتزمی باشد. داخل هواپیما که محدودیت جا وجود دارد این یک مزیت بسیارمهم بشمار می آید و کاهش وزن به منظور حصول حداکثر کارایی الزامی است. با این حال برای کاهش وزن بهایی باید پرداخت وآن بهره وری کمتر سیستم های الکتریکی فزکانس بالاست. حال اجازه دهید برای درک بهتر اهمیت موازنه در طراحی وارد مبحث سیستم های الکتریکی هواپیما شویم. هواپیماهای اولیه بدلیل اینکه فاقد تجهیزاتی بودند که مصرف کننده برق باشند نیازی به الکتریسیته نداشتند. تغییرات از دهه سوم قرن معاصر میلادی که هواپیماها مجهز به رادیوها وتجهیزات ناوبری که با جریانDCباطریها تغذیه می شدند شروع شد. پیشرفت های بعدی باعث شد ژنراتورهای کوچکی که توان DC(معمولا” 28 ولت ) تولید می کردند بکار گرفته شود. امروزه بجز هواپیماهای کوچک معمولی تمایلی به استفاده از سیستم های الکتریکی یکسویه وجود ندارد.همزمان با عصر ظهور موتورهای جت ، هواپیماها بصورت چشمگیری پیچیده شدند و طیف گسترده ای از تجهیزات الکتریکی بکار گرفته شد. هواپیما های مدرن نظامی با رادارهای قدرتمند ، حسگرها، تسلیحات ، ونمایشگرهای مدرن داخل کاکپیت تجهیز شده اند که برای کار نیاز به مقدار زیادی الکتریسیته دارند. هواپیماهای تجاری نیز برای سیستم های تهویه ، آشپزخانه ، نمایشگر های کاکپیت ، تجهیزات ارتباط رادیویی ، رادارهای هواشناسی و سیستم های سرگرمی داخل پرواز نیاز به توان الکتریکی دارند. منابع تغذیه DCجوابگوی نیازهای الکتریکی جهت تجهیزات عملیات پرواز ، راه اندازی ، تجهیزات گرمایی ، تجهیزات اویونیک ، چراغ های روشنایی داخل وخارج در هواپیماهای بزرگ نمی باشند.
این هواپیماها در عوض سیستم های الکتریکی AC را بکار می گیرند که معمولا” برق 115 ولت با فرکانس 400 هرتز تولید می کند. هواپیماها به تعدادی از سیستم های تولید الکتریسیته ، شامل هردوسیستم اصلی وجایگزین به منظور تغذیه بدون وقفه تجهیزات حیاتی در شرایط اضطراری مجهز هستند . توان اصلی) (mainمعمولا” توسط ژنراتورهای ACکه مستقیما” به موتورهای JETمتصل هستند فراهم می شود. هواپیماهای تجاری و بعضی از هواپیماهای نظامی به یک واحد تغذیه کمکی به نام APU (auxiliary power unit) مجهز هستند که اساسا” یک موتور جت کوچک است که از آن به عنوان یک منبع اضافی تولید توان استفاده می گردد. APU همیشه در حال کار و مکمل منبع تغذیه اصلی وهمچنین جایگزین آن در مواقع از دست دادن موتور می باشد.
APU
چنانچه APU هم از دست برود ، بسیاری از هواپیماها به یک منبع تغذیه دیگری به نام RAT (ram air turbine)که می تواند هنگام نیاز وارد عمل شود مجهز هستند. RAT در مواقع اضطراری برای تولید توان کافی به منظور پرواز هواپیما تا جایی که بتواند فرود امنی داشته باشد مورد استفاده قرار می گیرد. بنابراین RAT مانندAPUعمل می نماید. با این تفاوت که APU اساسا” یک موتور جت کوچک می باشد که برای تولید توان پشتیبان از همان سوخت معمول JETاستفاده می نماید ، ولی RATاز یک موتور ملخی تشکیل شده است که با جریان هوایی که از سرعت حرکت هواپیما تولید می شود می چرخد. این ملخ گردان ، توان لازم برای حرکت یک توربین را فراهم می نماید تا الکتریسیته ضروری که برای فعال نگه داشتن سیستم های حیاتی هواپیما مانند هیدرولیک ، تجهیزات کنترل پرواز وهمچنین دستگاههای کلیدی خودکار هواپیما(avionic)نیاز است را تولید کند. در شرایط عادی پرواز کل این مجموعه به داخل بدنه یا بال های هواپیما تا شده و مخفی می گردد.
RAT
ژنراتورهای هواپیما که با استفاده از یک آلترناتور، برق 115 ولت در فرکانس 400 هرتز تولید می کنند توان AC مورد نیاز را فراهم می نمایند. مزیت آلترناتورهای فرکانس بالا نیاز آن به حلقه های مسی کمتر برای تولید جریان الکتریکی مورد نیاز می باشد.این کاهش در مواد تشکیل دهنده به آلترناتورها اجازه می دهد تا ضمن کوچک شدن وزن وفضای کمتری را به خود اختصاص دهند.
گرچه فرکانس کاری قریب به اتفاق شبکه های توزیع برق 50 یا 60 هرتز می باشد با این وجود هواپیماهای بزرگ به طور معمول از سیستم های قدرت با فرکانس 400 هرتز بهره می گیرند. مطابق با یک قاعده مرسوم در طراحی هواپیما با کاهش یک پوند از وزن طراحی در واقع حداقل 5 پوند از وزن نهایی هواپیما کاسته می شود. دلیل این امر کاهش سوخت وهمچنین سبک تر شدن ساختار بدنه هواپیما برای حمل سوخت کمتر تا رسیدن به مقصد می باشد. از آنجایی که کاهش وزن ودر نتیجه کاهش هزینه های یک هواپیما اهمیت بسزایی دارد ، استفاده از ژنراتورهای الکتریکی سبک وکوچک 400 هرتز ، یک مزیت مهم در مقایسه با سیستم های 50 یا 60 هرتز به شمار می رود. با توجه به اینکه توان با ولتاژ متناسب است (P = VI)و طبق فرمول : Vl = L di/dt در یک میدان مغناطیسی با در نظر گرفتن قانون القای فاراده چنانچه فرکانس افزایش یابد ، dtکاهش یافته (f=1/t) یعنی سرعت قطع شار مغناطیسی توسط هادی بالارفته در نتیجه کاهش جریانی که به دلیل کاهش وزن سیم پیچ وهسته رخ می دهد را جبران می نماید پس برای داشتن یک توان ثابت ، با کاهش dt ، diنیز باید کاهش یابد واین بدان معنی است که جریان کمتری مورد نیاز است تا همان مقدار توان حاصل شود ودر نتیجه به میدان مغناطیسی که با هسته وسیم پیچ های کمتری ایجاد شده نیاز خواهد بود. واین یعنی کاهش وزن بنابراین ظرفیت ترابری هواپیما افزایش میابد.
حال به معایب کار در فرکانس 400 هرتز می پردازیم ، اشکال کار در فرکانس 400 هرتز این است که سیستم های فرکانس بالا دچار افت ولتاژ می شوند. مهمترین این افت ها از افت راکتیو نتیجه می شود. تلفات به دو دلیل یک طول هادی و دیگری فرکانس داخل هادی می باشد. با افزایش فرکانس افت ولتاز بیشتری اتفاق می افتد. در فرکانس 400 هرتز افت راکتیو می تواند تا هفت برابر بزرگتر از فرکانس 60 هرتز باشد .
این اختلاف به فهم اینکه چرا درشبکه های توزیع برق ازفرکانس 60هرتز به جای 400 هرتز داخل هواپیما استفاده می شود کمک می کند. فرکانس پائین تر افت توان را در مسافت های طولانی کاهش می دهد. طول هواپیما در مقایسه با ابعاد شبکه توزیع دلیل خوبی است که از افت ناشی از فرکانس 400 هرتز در مقایسه با مزیت دیگر آن بطور کامل چشم پوشی کنیم. در پایان به این نکته نیز باید توجه نمود که با توجه به مزیت فرکانس بالا برای استفاده در هواپیما چرا از فرکانس های بالاتر از 400 هرتز استفاده نمی گردد تا سیستم های الکتریکی داخل هواپیما فوق العاده سبکتر شود ، دلیل آن این است که فرکانس 400 هرتز بهینه بوده و در صورت بکارگیری فرکانس های بیشتر از آن ، مدارات شروع به تشعشع می نمایند که خود باعث ایجاد اختلال در عملکرد سیستم های الکترونیکی خواهد شد.
در حال حاضر ، DC آسان تر از AC تولید می شود و به راحتی به AC برعکس می شود
برای تولید AC با فرکانس خاص ، به یکی از موارد زیر نیاز دارید
موتوری که با سرعت ثابت می چرخد.
یک جعبه انتقال متغیر که سرعت چرخش را عادی می کند.
DC را به نحوی تولید کنید و سپس آن را به AC معکوس کنید.
ژنراتور برای هواپیماهای تک راهرو و بسیاری از هواپیماهای دو راهرو است و دارای رتبه قدرت زیر است:
رتبه: 90 کیلو ولت آمپر
5 دقیقه. امتیاز: 112.5kVA
5 ثانیه امتیاز: 150kVA
فرکانس: 400 ± 5Hz (3)
ولتاژ: 115/200V
اندازه: 375L × 460W × 330Hmm
وزن: 54.0 کیلوگرم (خشک)
مبدل فرکانس Rotary APOJET AJR در واقع یک منبع تغذیه محلی نصب شده در محوطه اپرون یا نزدیک به rotunda میباشد که برق با فرکانس 400 هرتز را برای هواپیما تولید می کند. پیلر با استفاده از آخرین تکنولوژی و چندین دهه تجربه در ساخت مبدل های دوار، پیشرفته ترین سیستم برای کنترل و بهترین سیستم های منبع تغذیه هواپیما را با قابلیت اضافه بار بالا و بدون هیچ گونه اختلال در شبکه ارائه می دهد.
باتری های سرب اسید اغلب به عنوان باتری (های) اصلی در هواپیما استفاده می شوند. نیکل کادمیوم (NiCd). سلول های نیکل کادمیوم دارای یک آند ساخته شده از هیدروکسید کادمیوم و یک کاتد از هیدروکسید نیکل هستند که در الکترولیت ساخته شده از هیدروکسیدهای پتاسیم، سدیم و لیتیوم غوطه ور می شوند.
یک سیستم الکتریکی یک جزء لاینفک و ضروری در همه طرحها به جز ساده ترین طراحی هواپیما است. ظرفیت و پیچیدگی سیستم الکتریکی بین یک هواپیمای سبک تک پیستونی ، تک موتوره و یک هواپیمای جت تجاری مدرن و چند موتوره بسیار متفاوت است. با این حال ، سیستم الکتریکی هواپیماها در هر دو انتهای طیف پیچیدگی دارای بسیاری از اجزای اساسی مشابه است.
همه سیستم های الکتریکی هواپیما دارای قطعاتی با قابلیت تولید برق هستند. بسته به هواپیما ، از ژنراتورها یا دینام ها برای تولید برق استفاده می شود. این موتورها معمولاً با موتور کار می کنند ، اما ممکن است از APU ، موتور هیدرولیک یا توربین هوایی Ram (RAT) نیز استفاده کنند. خروجی ژنراتور معمولاً 115-120V/400HZ AC ، 28V DC یا 14V DC است. برق ژنراتور ممکن است بدون تغییر استفاده شود یا از طریق ترانسفورماتورها ، یکسو کننده ها یا اینورترها جهت تغییر ولتاژ یا نوع جریان هدایت شود.
خروجی ژنراتور معمولاً به یک یا چند گذر توزیع هدایت می شود. قطعات جداگانه از گذرگاه با محافظت از مدار به شکل یک قطع کننده مدار یا فیوز موجود در سیم کشی تغذیه می شوند.
خروجی ژنراتور برای شارژ باتری (های) هواپیما نیز استفاده می شود. باتری ها معمولاً از انواع سربی-اسیدی یا NICAD هستند ، اما باتری های لیتیومی روز به روز رایج تر می شوند. از آنها برای راه اندازی هواپیما و به عنوان منبع اضطراری نیرو در صورت خرابی سیستم تولید یا توزیع استفاده می شود.
سیستم های الکتریکی اولیه هواپیما
برخی از هواپیماهای تک موتوره بسیار ساده دارای سیستم برقی نیستند. موتور پیستون مجهز به سیستم جرقه زنی مگنتو است که خودکار تغذیه می شود و مخزن سوخت به گونه ای قرار گرفته است که موتور را به طور گرانشی تغذیه می کند. هواپیما با استفاده از یک چرخ دنده و میل لنگ یا با "حرکت دستی" موتور راه اندازی می شود.
اگر بخواهید یک استارت برقی ، چراغ ، ابزارهای برقی پرواز ، وسایل ناوبری یا رادیوها وجود داشته باشد ، یک سیستم الکتریکی به یک ضرورت تبدیل می شود. در بیشتر موارد ، سیستم با استفاده از یک گذرگاه توزیع ، یک باتری و یک ژنراتور یا دینام با موتور واحد تغذیه DC می کند. مقررات ، به شکل سوئیچ روشن/خاموش ، برای جدا کردن باتری از گذرگاه و جداسازی ژنراتور/دینام از گذرگاه در نظر گرفته می شود. یک آمپرمتر ، بار سنج یا چراغ هشدار نیز برای نشان دادن خرابی سیستم شارژ تعبیه شده است. قطعات الکتریکی به نوار باس متصل می شوند که از قطع کننده مدار یا فیوزهایی برای محافظت از مدار استفاده می کند. ممکن است مقرراتی در نظر گرفته شود که به منبع تغذیه خارجی مانند باتری اضافی یا واحد قدرت زمینی (GPU) متصل شود تا به استارت موتور کمک کند یا در حالی که موتور در حال کار نیست ، برق را تأمین کند.
سیستم های الکتریکی پیشرفته هواپیما
سیستم های الکتریکی پیچیده تر معمولاً سیستم های ولتاژ چندگانه هستند که از ترکیبی از اتوبوس های AC و DC برای تغذیه اجزای مختلف هواپیما استفاده می کنند. تولید برق اولیه معمولاً AC با یک یا چند واحد اصلاح کننده ترانسفورماتور (TRU) است که تبدیل ولتاژ DC را برای تغذیه اتوبوس های DC فراهم می کند. تولید AC ثانویه از APU معمولاً برای استفاده در زمین در مواقع کار نکردن موتورها و برای استفاده در هوا در صورت خرابی قطعات ارائه می شود. تولید درجه سوم به شکل موتور هیدرولیک یا RAT نیز ممکن است در سیستم گنجانده شود تا در صورت خرابی های متعدد ، افزونگی ایجاد شود. قطعات ضروری AC و DC به اتوبوس های خاص متصل می شوند و تقریباً در همه شرایط خرابی ، نیروهایی برای تأمین برق این اتوبوس ها در نظر گرفته شده است. در صورت از بین رفتن تمام توان AC ، اینورتر استاتیک در سیستم گنجانده شده است تا گذرگاه Essential AC از باتری های هواپیما تغذیه شود.
مقررات قوی نظارت و هشدار خرابی سیستم در سیستم الکتریکی گنجانده شده است و در صورت لزوم به خلبانان ارائه می شود. هشدارها ممکن است شامل خرابی/خرابی ژنراتور ، خرابی TRU ، خرابی باتری ، خرابی/خرابی گذرگاه و نظارت بر قطع کننده مدار باشد ، اما محدود به آن نمی شود. سازنده همچنین روشهای دقیق جداسازی سیستم الکتریکی را ارائه می دهد تا در صورت آتش سوزی الکتریکی مورد استفاده قرار گیرد.
مطابق با مقررات قابل اجرا ، قطعاتی مانند ابزارهای آماده به کار و روشنایی مسیرهای اضطراری هواپیما دارای منبع تغذیه پشتیبان خود هستند در حالی که ژنراتورها منبع اصلی نیروی هواپیما هستند ، چندین منبع تکمیلی در هواپیما برای افزونگی ضروری هستند ، بنابراین GE بر روی تعدادی از فناوری های جدید از جمله سلولهای سوختی ، خازنهای فوق العاده و پرانرژی کار می کند. لیتیوم یون با چگالی بالا ...نتیجه تصویر برای سیستم قدرت هواپیما
یک هواپیما شامل دو مدار اصلی الکتریکی و یک مدار متناوب است. دو مدار ، یکی در هر طرف هواپیما ، به یک ژنراتور متصل است. این ژنراتور است که با استفاده از انرژی مکانیکی تامین شده توسط یکی از موتورها ، برق تولید می کند. این همان چیزی است که ما آن را تولید برق می نامیم. آبان 18 ، 1394 AP
برق مورد نیاز سیستمهای هواپیما، معمولاً از یکی از دو منبع مستقل زیر تأمین می شود:
ژنراتور: معمولا به تعداد موتورهای هواپیما ژنراتورهایی متصل به اونها وجود دارد که برق مورد نیاز هواپیما را تأمین می کنند که البته این برق AC است.
باتری ها: که برق آنها DCهست و برق اضطراری هم به آنها وصل است.
این دو معمولا در تمامی هواپیماها وجود دارد و مشترک است که در زیر به توضیح آنها می پردازیم:
هواپیماهای برق مستقیم
در موتورهای این نوع هواپیماها ژنراتور برق مستقیم نصب شده است. در بیشتر موارد این ژنراتور نقش استارتر را نیز ایفا می کند، به این صورت که از طریق دستگاه برق 28 ولت زمینی که از بیرون به هواپیما وصل می شود یا توسط باطریهای هواپیما که دارای ولتاژ 24هستند می توان موتورها را استارت زده و روشن کرد، پس از روشن شدن موتور این استارتر به طور خودکار به ژنراتور تبدیل شده، نیروی الکتریکی مورد نیاز هواپیما را تامین می کند.
آشنایی با سیستم برق هواپیماها
ژنراتور سومی نیز به این ترمینال وصل می گردد که روی یک متور جت کوچک که معمولا در انتهای هواپیما قرار دارد نصب شده است. این موتور قادر است روی زمین برق هواپیما همچنین هوای لازم جهت تهویه هواپیما را تامین نماید، معمولا این موتور هنگام پرواز خاموش است ولی در صورت از دست رفتن ژنراتور اصلی هواپیما می تواند در پرواز نیز روشن و ژنراتور آن مورد استفاده قرار گیرد.این موتور APU نام دارد.
روی زمین می توان از دستگاه مولد زمینی 28 ولت نیز استفاده کرد که در این صورت نیازی به روشن کردن APU نبوده و باطری های هواپیما نیز مصرف نخواهند شد تا انرژی آنها جهت حالت اضطراری و همچنین ایستگاه هایی که مولد زمینی ندارند حفظ شود.
برق 28 ولت تولیدی از ترمینال اصلی به ترمینال های فرعی و از آن طریق به مصرف کننده ها داده می شود.
لازم به ذکر است برخی مصرف کننده های الکترونیکی نیاز به برق 115 ولت با فرکانس ثابت 400 هرتز دارند که برای تولید این برق از اینورتر استفاده می شود(اینورتر یک مبدل الکترونیکی است که برق 28 ولت مستقیم را به 115 ولت 400 هرتز تبدیل می کند). در شکل زیر اینورتر دیده می شود که یکی ترمینال سامانه های طرف خلبان و دیگری طرف کمک را تغذیه می نماید، در صورت از کار افتادن هریک از این اینورترها، اینورتر اضطراری را می توان جایگزین آن کرد که کلید تبدیل آن در شکل دیده می شود، روی زمین می توان دستگاه مولد 115 ولت 400 هرتز نیز به هواپیما وصل کرد که آن هم در سمت راست شکل دیده می شود.
هواپیماهای برق متناوب
آشنایی با سیستم برق هواپیماها
در این نوع هواپیماها از ژنراتورهای با خروجی 115 ولت 400 هرتز 3 فاز استفاده شده این هواپیما دو ژنراتور روی موتورها و ژنراتور سوم روی APU نصب شده که توسط سامانه کنترل خودکار ترمینال ها می توانند به ترمینال های مربوطه وصل شوند، ترمینال ها دارای سه فاز هستند که هر فاز به مصرف کننده مربوط خود متصل می شود. در این مثال در شرایط عادی ژنراتور شماره 1 ترمینال AC شماره 1 و همچنین ترمینال ضروری را تغذیه می کند و ژنراتور شماره 2 ترمینال AC شماره 2 را تغذیه می کند. ژنراتور شماره 3 نیز آماده است تا در صورت از کار افتادن هر یک از ژنراتورها به طور خودکار توسط سامانه کنترلی گفته شده جایگزین ژنراتور معیوب گردد، اصولا در شرایط عادی قبل از بلند شدن هواپیما، APU را خاموش می کنند، اگر از ژنراتور سوم به هر علتی نتوان استفاده نمود در صورت از کار افتادن هریک از ژنراتورها ژنراتور سالم به طور خودکار تمامی ترمینال ها را تغذیه خواهد نمود. هنگامی که هواپیما روی زمین باشد می توان از دستگاه مولد زمینی 115 ولت 400 هرتز 3 فاز استفاده نمود.
سیستمهای الکتریکی از نظر سرویسدهی به دو گروه اصلی و اضطراری و از نظر ولتاژ الکتریکی به دو گروه AC و DC دستهبندی میشوند.
ژنراتورهای اصلی هواپیما برق سه فاز ۱۱۵/۲۰۰ VAC را در فرکانس ۴۰۰ هرتز را تولید میکنند.
در صورت قطع توان ژنراتورهای اصلی، ژنراتورهای اضطراری که شامل واحد توان کمکی و باتریها هستند، وظیفه تأمین انرژی هواپیما را برعهده دارند.
برق جریان متناوب هواپیما در مواقع اضطراری از طریق ژنراتور APU تأمین میگردد.
این ژنراتور میتواند در حین پرواز جایگزین یک یا هردوی ژنراتورهای موتورگرد (اصلی) شود.
همچنین این ژنراتور در روی زمین هم در صورت نبودن منبع ولتاژ خارجی، برق هواپیما را تأمین میکند.
برق DC هواپیما توسط دو باتری تأمین میشود که هر کدام از آنها توان نامی ۲۳ آمپر ساعت دارند.
این منابع تغذیه اصولاً برای موارد راهاندازی APU در پرواز و در روی زمین و تغذیه شبکه DC/AC اضطراری استفاده میشوند.
دلیل استفاده از برق 400 هرتز در هواپیما
در طراحی هواپیما مهندسین می بایست یکسری توافقات را به منظور موازنه بهینه در خصوص راه حل ها در نظر بگیرند که گاهی ممکن است بین یکی با دیگری تناقض بوجود آید. یک مثال خوب در این رابطه سیستم الکتریکی هواپیماست. کوچک وسبک تر شدن منابع تغذیه مزیت استفاده از سیستم برق 400هرتز به جای 60 هرتزمی باشد. داخل هواپیما که محدودیت جا وجود دارد این یک مزیت بسیارمهم بشمار می آید و کاهش وزن به منظور حصول حداکثر کارایی الزامی است. با این حال برای کاهش وزن بهایی باید پرداخت وآن بهره وری کمتر سیستم های الکتریکی فزکانس بالاست. حال اجازه دهید برای درک بهتر اهمیت موازنه در طراحی وارد مبحث سیستم های الکتریکی هواپیما شویم. هواپیماهای اولیه بدلیل اینکه فاقد تجهیزاتی بودند که مصرف کننده برق باشند نیازی به الکتریسیته نداشتند. تغییرات از دهه سوم قرن معاصر میلادی که هواپیماها مجهز به رادیوها وتجهیزات ناوبری که با جریانDCباطریها تغذیه می شدند شروع شد. پیشرفت های بعدی باعث شد ژنراتورهای کوچکی که توان DC(معمولا” 28 ولت ) تولید می کردند بکار گرفته شود. امروزه بجز هواپیماهای کوچک معمولی تمایلی به استفاده از سیستم های الکتریکی یکسویه وجود ندارد.همزمان با عصر ظهور موتورهای جت ، هواپیماها بصورت چشمگیری پیچیده شدند و طیف گسترده ای از تجهیزات الکتریکی بکار گرفته شد. هواپیما های مدرن نظامی با رادارهای قدرتمند ، حسگرها، تسلیحات ، ونمایشگرهای مدرن داخل کاکپیت تجهیز شده اند که برای کار نیاز به مقدار زیادی الکتریسیته دارند. هواپیماهای تجاری نیز برای سیستم های تهویه ، آشپزخانه ، نمایشگر های کاکپیت ، تجهیزات ارتباط رادیویی ، رادارهای هواشناسی و سیستم های سرگرمی داخل پرواز نیاز به توان الکتریکی دارند. منابع تغذیه DCجوابگوی نیازهای الکتریکی جهت تجهیزات عملیات پرواز ، راه اندازی ، تجهیزات گرمایی ، تجهیزات اویونیک ، چراغ های روشنایی داخل وخارج در هواپیماهای بزرگ نمی باشند.
این هواپیماها در عوض سیستم های الکتریکی AC را بکار می گیرند که معمولا” برق 115 ولت با فرکانس 400 هرتز تولید می کند. هواپیماها به تعدادی از سیستم های تولید الکتریسیته ، شامل هردوسیستم اصلی وجایگزین به منظور تغذیه بدون وقفه تجهیزات حیاتی در شرایط اضطراری مجهز هستند . توان اصلی) (mainمعمولا” توسط ژنراتورهای ACکه مستقیما” به موتورهای JETمتصل هستند فراهم می شود. هواپیماهای تجاری و بعضی از هواپیماهای نظامی به یک واحد تغذیه کمکی به نام APU (auxiliary power unit) مجهز هستند که اساسا” یک موتور جت کوچک است که از آن به عنوان یک منبع اضافی تولید توان استفاده می گردد. APU همیشه در حال کار و مکمل منبع تغذیه اصلی وهمچنین جایگزین آن در مواقع از دست دادن موتور می باشد.
APU
چنانچه APU هم از دست برود ، بسیاری از هواپیماها به یک منبع تغذیه دیگری به نام RAT (ram air turbine)که می تواند هنگام نیاز وارد عمل شود مجهز هستند. RAT در مواقع اضطراری برای تولید توان کافی به منظور پرواز هواپیما تا جایی که بتواند فرود امنی داشته باشد مورد استفاده قرار می گیرد. بنابراین RAT مانندAPUعمل می نماید. با این تفاوت که APU اساسا” یک موتور جت کوچک می باشد که برای تولید توان پشتیبان از همان سوخت معمول JETاستفاده می نماید ، ولی RATاز یک موتور ملخی تشکیل شده است که با جریان هوایی که از سرعت حرکت هواپیما تولید می شود می چرخد. این ملخ گردان ، توان لازم برای حرکت یک توربین را فراهم می نماید تا الکتریسیته ضروری که برای فعال نگه داشتن سیستم های حیاتی هواپیما مانند هیدرولیک ، تجهیزات کنترل پرواز وهمچنین دستگاههای کلیدی خودکار هواپیما(avionic)نیاز است را تولید کند. در شرایط عادی پرواز کل این مجموعه به داخل بدنه یا بال های هواپیما تا شده و مخفی می گردد.
RAT
ژنراتورهای هواپیما که با استفاده از یک آلترناتور، برق 115 ولت در فرکانس 400 هرتز تولید می کنند توان AC مورد نیاز را فراهم می نمایند. مزیت آلترناتورهای فرکانس بالا نیاز آن به حلقه های مسی کمتر برای تولید جریان الکتریکی مورد نیاز می باشد.این کاهش در مواد تشکیل دهنده به آلترناتورها اجازه می دهد تا ضمن کوچک شدن وزن وفضای کمتری را به خود اختصاص دهند.
گرچه فرکانس کاری قریب به اتفاق شبکه های توزیع برق 50 یا 60 هرتز می باشد با این وجود هواپیماهای بزرگ به طور معمول از سیستم های قدرت با فرکانس 400 هرتز بهره می گیرند. مطابق با یک قاعده مرسوم در طراحی هواپیما با کاهش یک پوند از وزن طراحی در واقع حداقل 5 پوند از وزن نهایی هواپیما کاسته می شود. دلیل این امر کاهش سوخت وهمچنین سبک تر شدن ساختار بدنه هواپیما برای حمل سوخت کمتر تا رسیدن به مقصد می باشد. از آنجایی که کاهش وزن ودر نتیجه کاهش هزینه های یک هواپیما اهمیت بسزایی دارد ، استفاده از ژنراتورهای الکتریکی سبک وکوچک 400 هرتز ، یک مزیت مهم در مقایسه با سیستم های 50 یا 60 هرتز به شمار می رود. با توجه به اینکه توان با ولتاژ متناسب است (P = VI)و طبق فرمول : Vl = L di/dt در یک میدان مغناطیسی با در نظر گرفتن قانون القای فاراده چنانچه فرکانس افزایش یابد ، dtکاهش یافته (f=1/t) یعنی سرعت قطع شار مغناطیسی توسط هادی بالارفته در نتیجه کاهش جریانی که به دلیل کاهش وزن سیم پیچ وهسته رخ می دهد را جبران می نماید پس برای داشتن یک توان ثابت ، با کاهش dt ، diنیز باید کاهش یابد واین بدان معنی است که جریان کمتری مورد نیاز است تا همان مقدار توان حاصل شود ودر نتیجه به میدان مغناطیسی که با هسته وسیم پیچ های کمتری ایجاد شده نیاز خواهد بود. واین یعنی کاهش وزن بنابراین ظرفیت ترابری هواپیما افزایش میابد.
حال به معایب کار در فرکانس 400 هرتز می پردازیم ، اشکال کار در فرکانس 400 هرتز این است که سیستم های فرکانس بالا دچار افت ولتاژ می شوند. مهمترین این افت ها از افت راکتیو نتیجه می شود. تلفات به دو دلیل یک طول هادی و دیگری فرکانس داخل هادی می باشد. با افزایش فرکانس افت ولتاز بیشتری اتفاق می افتد. در فرکانس 400 هرتز افت راکتیو می تواند تا هفت برابر بزرگتر از فرکانس 60 هرتز باشد .
این اختلاف به فهم اینکه چرا درشبکه های توزیع برق ازفرکانس 60هرتز به جای 400 هرتز داخل هواپیما استفاده می شود کمک می کند. فرکانس پائین تر افت توان را در مسافت های طولانی کاهش می دهد. طول هواپیما در مقایسه با ابعاد شبکه توزیع دلیل خوبی است که از افت ناشی از فرکانس 400 هرتز در مقایسه با مزیت دیگر آن بطور کامل چشم پوشی کنیم. در پایان به این نکته نیز باید توجه نمود که با توجه به مزیت فرکانس بالا برای استفاده در هواپیما چرا از فرکانس های بالاتر از 400 هرتز استفاده نمی گردد تا سیستم های الکتریکی داخل هواپیما فوق العاده سبکتر شود ، دلیل آن این است که فرکانس 400 هرتز بهینه بوده و در صورت بکارگیری فرکانس های بیشتر از آن ، مدارات شروع به تشعشع می نمایند که خود باعث ایجاد اختلال در عملکرد سیستم های الکترونیکی خواهد شد.
در حال حاضر ، DC آسان تر از AC تولید می شود و به راحتی به AC برعکس می شود
برای تولید AC با فرکانس خاص ، به یکی از موارد زیر نیاز دارید
موتوری که با سرعت ثابت می چرخد.
یک جعبه انتقال متغیر که سرعت چرخش را عادی می کند.
DC را به نحوی تولید کنید و سپس آن را به AC معکوس کنید.
ژنراتور برای هواپیماهای تک راهرو و بسیاری از هواپیماهای دو راهرو است و دارای رتبه قدرت زیر است:
رتبه: 90 کیلو ولت آمپر
5 دقیقه. امتیاز: 112.5kVA
5 ثانیه امتیاز: 150kVA
فرکانس: 400 ± 5Hz (3)
ولتاژ: 115/200V
اندازه: 375L × 460W × 330Hmm
وزن: 54.0 کیلوگرم (خشک)
مبدل فرکانس Rotary APOJET AJR در واقع یک منبع تغذیه محلی نصب شده در محوطه اپرون یا نزدیک به rotunda میباشد که برق با فرکانس 400 هرتز را برای هواپیما تولید می کند. پیلر با استفاده از آخرین تکنولوژی و چندین دهه تجربه در ساخت مبدل های دوار، پیشرفته ترین سیستم برای کنترل و بهترین سیستم های منبع تغذیه هواپیما را با قابلیت اضافه بار بالا و بدون هیچ گونه اختلال در شبکه ارائه می دهد.
باتری های سرب اسید اغلب به عنوان باتری (های) اصلی در هواپیما استفاده می شوند. نیکل کادمیوم (NiCd). سلول های نیکل کادمیوم دارای یک آند ساخته شده از هیدروکسید کادمیوم و یک کاتد از هیدروکسید نیکل هستند که در الکترولیت ساخته شده از هیدروکسیدهای پتاسیم، سدیم و لیتیوم غوطه ور می شوند.
-
rohamavation
نام: roham hesami radرهام حسامی راد
محل اقامت: 100 مایلی شمال لندن جاده آیلستون، لستر، لسترشر. LE2
عضویت : سهشنبه ۱۳۹۹/۸/۲۰ - ۰۸:۳۴
پست: 3286-
سپاس: 5494
- جنسیت:
تماس:
Re: هوافضا
ماهواره های مکعبی برای چه مواردی استفاده میشن
CubeSats در حال حاضر معمولا در مدار پایین زمین برای کاربردهایی مانند سنجش از راه دور و ارتباطات استفاده میشن.CubeSat شامل اجزای زیادی است که می توانند به شش زیر سیستم اصلی تقسیم کنیم ساختار. ارتباط؛ قدرت؛ تعیین و کنترل نگرش؛ کنترل فرمان و داده ها؛ و محموله
شما جعبه ای را در فضا تصور کنید که به اندازه یک جعبه دستمال کاغذی بلند است و می تواند از زمین عکس بگیرد. این دقیقاً همان کاری است که Planet Labs انجام میدهد: آنها از یک 3U (یک CubeSat 10×10×34 سانتیمتری) به نام Dove استفاده میکنند
CubeSats چگونه کار میکنه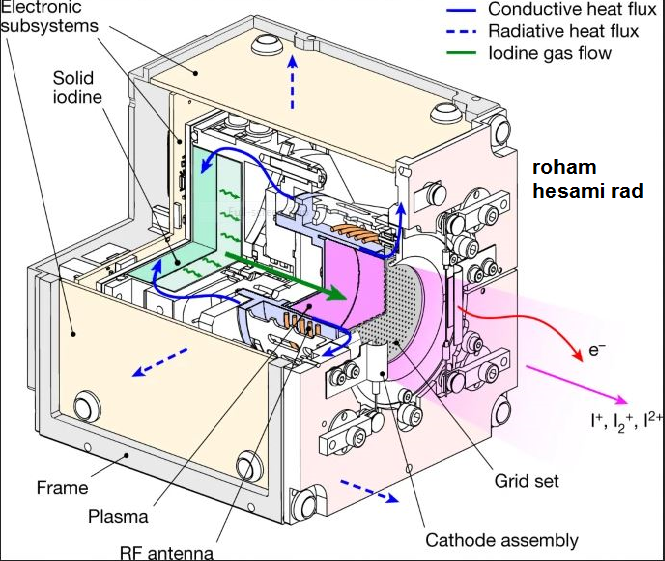
CubeSat نوعی ماهواره کوچک برای تحقیقات فضاییه که از چندین واحد مکعب 10×10×11.35 سانتیمتر یا یک U منفرد تشکیل شده است که واحد اندازهگیری CubeSats است. CubeSat ها وزنی بیش از 1.33 کیلوگرم در واحد ندارن آنها در مدار پایین زمین (LEO) که دارای ارتفاعی بین 160 کیلومتر تا 2000 کیلومتر است شناور هستند و تقریباً هر 90 دقیقه یک بار به دور زمین می چرخند.
CubeSat ها معمولاً از طریق Nanoracks CubeSat Deployer (NRCSD) یا Poly Picosat Orbital Deployer (P-POD) مستقر می شوند. NRCSD یک سیستم توزیع کننده CubeSat مستقل و واجد شرایط ایمنی پرواز ISS ناسا است که به صورت مکانیکی و الکتریکی CubeSat ها را از ایستگاه فضایی بین المللی، وسایل نقلیه تامین بار و خدمه ISS جدا می کند. NRCSD قادر است شش واحد CubeSat را نگه دارد: 1U، 2U، 3U، 4U، 5U، و 6U (2×3 و 1×6) CubeSats. P-Pod به CubeSat اجازه می دهد تا از پرتابگر جدا شود و برای حمل سه CubeSat استاندارد طراحی شده است. CubeSats باید با الزامات NRCSD یا P-POD سازگار باشد که شامل موارد کلی، ابعاد، جرم، الکتریکی و عملیاتی است.
ساختار
اندازه CubeSat ها از 1 U تا 3 U است. طول و عرض آنها همیشه 10×10 سانتی متر است، اما ارتفاع آنها می تواند از 11.35 تا 34.05 سانتی متر متغیر باشد. مصالح مجاز سازه آلیاژهای آلومینیوم 7075، 6061، 5005 و 5052 می باشد و برای جلوگیری از جوش سرد نیاز به آنودایز دارند.
ارتباط
سیستم ارتباطی (COM) به شدت توسط مقدار توان موجود محدود شده است که معمولاً حدود 2 وات است.
CubeSats از سیستم های ارتباط رادیویی در باند VHF، UHF، F-، S-، C- و X استفاده می کند. این ماهواره از یک آنتن استفاده می کند که معمولاً یک بار در مدار قرار می گیرد تا به ارتباطات کمک کند.
قدرت
سیستم برق (EPS) از پنل های خورشیدی و باتری ها تشکیل شده است. پنل های خورشیدی سلول های خورشیدی را نگه می دارند که نور خورشید را از خورشید به الکتریسیته تبدیل می کنند. باتری ها جرم و حجم زیادی را در CubeSat که قبلاً محکم بسته بندی شده است می گیرند. یکی از چالش های اصلی طراحی، قرار دادن پنل های خورشیدی، یا در کناره های خود CubeSat، یا استقرار پنل های خورشیدی است. داشتن پانلهای قابل استقرار، مساحت سلولهای خورشیدی را اضافه میکند اما پیچیدگی مکانیکی بیشتری را نیز به همراه دارد. برای استقرار پانل ها، آنها به مکانیزم رهاسازی سیم سوختگی نیاز دارند و هر سیستم مکانیکی احتمال خرابی را اضافه می کند. اگر پنل به درستی مستقر نشود، CubeSat هیچ برقی نخواهد داشت و حتی اگر همه چیز به درستی کار کند، CubeSat به دلیل کمبود برق از کار می افتد.
کنترل
سیستم تعیین و کنترل نگرش (ADCS) جهت گیری CubeSat را با توجه به چارچوب مرجع اینرسی کنترل می کند و شامل چرخ های واکنش، مغناطیس کننده ها، رانشگرها، ردیاب های ستاره، سنسورهای خورشید و زمین، سنسورهای نرخ زاویه ای و گیرنده ها و آنتن های GPS است. این سیستم پیچیده مورد نیاز است زیرا زمانی که ماهواره برای اولین بار به کار گرفته می شود،
ظرفیت ترابری
محموله یا هدف CubeSat بسته به نوع ماموریت مورد نیاز به طور چشمگیری متفاوت است
فتومتر
در پایین ماهواره قرار گرفته است تا رو به زمین باشد و اتمسفر را بخواند.
دیودهای خاموش کننده فتومتر
در کنار نورسنج که در همان جهت قرار دارد.
دوربین
در پایین ماهواره قرار گرفته تا دائماً رو به زمین و زمین باشد و از آن عکس بگیرید.
کویل های گشتاور
یک سیم پیچ گشتاور عمود بر هر محور برای کنترل وضعیت مناسب نصب شده است.
باتری ها
باتریها سنگینترین و بزرگترین جسم روی هواپیما هستند، به همین دلیل در یک طرف تا حد امکان نزدیک به مرکز هندسی قرار دارند و مشکلات CG و فضای اشغال شده را به حداقل میرسانند.
آنتن
در بالای ماهواره قرار دارد که طول قابل استقرار آن را به حداکثر می رساند.
واحد پردازش قدرت رانشگر
این واحد به عایق ارتعاشی نیاز دارد و بر روی چهار پایه نصب می شود، این نیاز به نصب محکم در پایین ماهواره دارد.
رانشگرها
چهار رانشگر در طرف مقابل ماهواره در گوشه های مخالف قرار گرفته اند تا توانایی کنترل را به حداکثر برسانند.چندین سیستم رانش گاز سرد برای پلت فرم CubeSat توسعه داده شده است و آنها بالغ ترین نوع پیشرانه برای CubeSats هستند. پیشران های رایج مورد استفاده برای سیستم های گاز سرد شامل نیتروژن، بوتان، هگزا فلوراید گوگرد مایع، آرگون، زنون، R134a و R236fa می باشد.
چشمه های جداسازی
پاها تنها بخشی از کیوب ست ها هستند که با دیگر کیوب ست ها تماس می گیرند، بنابراین فنرهایی در آنجا قرار دارند تا به جداسازی ماهواره ها در هنگام استقرار در مدار کمک کنند.
سوئیچ ها
سوئیچ ها نیز روی پاها قرار دارند و در PPOD فشرده می شوند، پس از استقرار آنها باز می شوند و اجازه می دهند ماهواره روشن شود.
پین بکش
پین کش در وسط ماهواره قرار دارد، به طوری که با یکی از پنجره های PPOD در یک خط قرار دارد. این یک سوئیچ اضافی است که برق را قطع می کند و می توان آن را قبل از راه اندازی از طریق پنجره جدا کرد.
تابلو برق و تابلو کنترل نگرش
این تخته ها به صورت افقی روی هم نصب می شوند تا فضای اشغال شده را به حداقل برسانند.
پردازنده SID
در مرکز قرار گرفته تا طول سیم را به حداقل برساند.
تابلوی ردیابی پاور پوینت
اندازه این برد به گونه ای بود که در کنار برد آنتن قرار گیرد تا فضای بالای ماهواره را به حداکثر برساند.
رادیو
برد رادیویی در وسط ماهواره تا حد امکان نزدیک به برد رادیویی نصب می شود تا طول سیم به حداقل برسد.
کنترل گره ترمینال
این برد روی یک برد مجاور به رادیو و پردازنده SID قرار داشت تا طول سیم بین سه برد به حداقل برسد.
کنترل حرارتی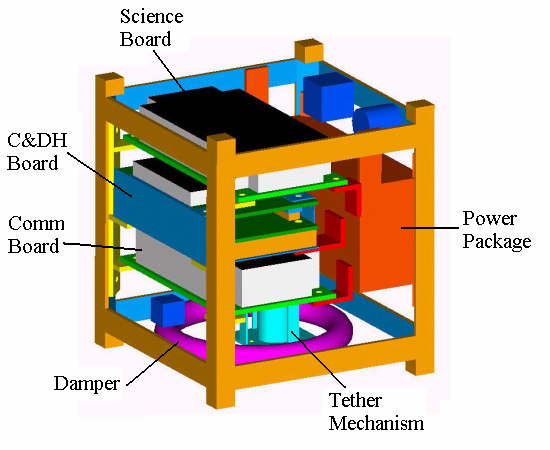
برای موفقیت در این ماموریت، ماهواره باید در محیط سخت فضایی سالم بمونه. دما در فضا از 120 درجه سانتیگراد در نور مستقیم خورشید تا -100 درجه سانتیگراد در سایه زمین متغیر است و آن را به یکی از خشن ترین محیط های قابل تصور تبدیل می کند. متأسفانه سیستم های ماهواره در این محدوده دمایی کار نخواهند کرد، بنابراین محیط حرارتی آن باید کنترل شود. در حالی که دمای فضا به خودی خود وحشیانه است، نوسانات سریع دما نیز مشکلاتی را ایجاد می کند. در طول هر چرخش به دور زمین، فضاپیما ممکن است هر دو درجه حرارت را تحمل کند.
سه مرحله از مأموریت بر سیستم کنترل حرارتی (TCS) تأثیر می گذارد: پرتاب، قرارگیری مداری توسط پرتابگر و مدار نهایی. پرتابگر دمای مناسب برای دو مرحله اول این ماموریت را فراهم می کند. مدار نهایی تعیین می کند که کدام TCS باید برای هر جزء استفاده شود. هر جزء دارای محدوده دمای عملیاتی خاص خود است. حتی زمانی که عملیاتی نیست، توصیه نمی شود برای مدت طولانی خارج از محدوده دمای عملیاتی قرار بگیرید.CubeSats را می توان در فضای نسبتاً کوچک خالی روی یک پرتابگر نصب کرد.
پیشرانه الکتریکی CubeSat معمولاً از انرژی الکتریکی برای شتاب دادن پیشرانه به سرعت بالا استفاده می کند که منجر به ضربه ویژه بالا می شود. بسیاری از این فناوریها را میتوان به اندازه کافی برای استفاده در نانوماهوارهها کوچک کرد و چندین روش در حال توسعه هستند. انواع پیشرانه های الکتریکی که در حال حاضر برای استفاده در CubeSats طراحی شده اند عبارتند از: پیشرانه های جلوه هال، رانشگرهای یونی، رانشگرهای پلاسما پالسی، رانشگرهای الکترواسپری، و رزیستوجت ها. چندین ماموریت قابل توجه CubeSat قصد دارند از نیروی محرکه الکتریکی استفاده کنند، مانند مکعب یخ ماه ناسا راندمان بالای مرتبط با نیروی محرکه الکتریکی می تواند به CubeSats اجازه دهد تا خود را به سمت مریخ برانند سیستم های نیروی محرکه الکتریکی در استفاده از انرژی خود دارای ضعف هستند، که به CubeSat نیاز دارد که سلول های خورشیدی بزرگتر، توزیع نیرو پیچیده تر، و اغلب باتری های بزرگتر داشته باشد. علاوه بر این، بسیاری از روشهای نیروی محرکه الکتریکی ممکن است همچنان به مخازن تحت فشار برای ذخیره پیشران نیاز داشته باشند، که توسط مشخصات طراحی CubeSat محدود شده است.
ESTCube-1 از بادبان برقی خورشیدی-بادی استفاده کرد که به میدان الکترومغناطیسی متکی است تا به جای یک ماده جامد به عنوان بادبان عمل کند. این فناوری از یک میدان الکتریکی برای انحراف پروتون ها از باد خورشیدی برای تولید نیروی رانش استفاده می کرد. این شبیه به یک اتصال الکترودینامیکی است که کشتی برای کار کردن فقط نیاز به تامین برق دارد.
بادبان خورشیدی
بادبان های خورشیدی (که بادبان های نوری یا بادبان های فوتونی نیز نامیده می شوند) شکلی از رانش فضاپیما هستند که از فشار تابشی (که فشار خورشیدی نیز نامیده می شود) از ستارگان برای فشار دادن آینه های بزرگ فوق العاده نازک به سرعت های بالا استفاده می کنند و نیازی به پیشران ندارند. نیروی ناشی از مقیاس بادبان خورشیدی با مساحت بادبان، باعث میشود بادبانها برای استفاده در CubeSats مناسب باشند، زیرا جرم کوچک آنها باعث شتاب بیشتر برای منطقه بادبان خورشیدی معین میشود. با این حال، بادبان های خورشیدی هنوز باید در مقایسه با ماهواره بسیار بزرگ باشند، به این معنی که بادبان های خورشیدی مفید باید مستقر شوند و پیچیدگی مکانیکی و منبع بالقوه شکست را اضافه کنند. این روش پیشرانه تنها روشی است که با محدودیت های تعیین شده توسط CubeSat Design Specification مواجه نیست، زیرا به فشار بالا، مواد خطرناک یا انرژی شیمیایی قابل توجهی نیاز ندارد. تعداد کمی از CubeSat ها از بادبان خورشیدی به عنوان نیروی محرکه و پایداری اصلی خود در اعماق فضا استفاده کرده اند
قدرت
پنل های خورشیدی Winglet باعث افزایش سطح برای تولید برق می شود
CubeSats از سلولهای خورشیدی برای تبدیل نور خورشید به الکتریسیته استفاده میکند که سپس در باتریهای لیتیوم یونی قابل شارژ ذخیره میشود که انرژی را در زمان کسوف و همچنین در زمان اوج بار فراهم میکنند. این ماهوارهها سطح محدودی روی دیوارههای خارجی خود برای مونتاژ سلولهای خورشیدی دارند و باید به طور مؤثر با سایر بخشها مانند آنتنها، حسگرهای نوری، لنز دوربین، سیستمهای پیشرانه و پورتهای دسترسی به اشتراک گذاشته شوند. باتریهای لیتیوم یون دارای نسبت انرژی به جرم بالایی هستند که آنها را برای استفاده در فضاپیماهای دارای محدودیت جرم مناسب میسازد. شارژ و دشارژ باتری معمولاً توسط یک سیستم برق اختصاصی (EPS) انجام می شود. باتریها گاهی اوقات دارای گرمکنهایی هستند تا از رسیدن باتری به دمای پایین خطرناکی که ممکن است باعث شکست باتری و ماموریت شود جلوگیری کند.
سرعت پوسیدگی باتریها به تعداد چرخههایی که برای آنها شارژ و دشارژ میشوند و همچنین به عمق هر تخلیه بستگی دارد: هرچه میانگین عمق تخلیه بیشتر باشد، باتری سریعتر تحلیل میرود. برای مأموریتهای LEO، میتوان انتظار داشت که تعداد سیکلهای تخلیه حدود چند صد باشد.
به دلیل محدودیتهای اندازه و وزن، CubeSats معمولی که در LEO با پنلهای خورشیدی روی بدنه پرواز میکنند کمتر از 10 وات تولید کردهاندماموریتهای با نیاز به توان بالاتر میتوانند از کنترل نگرش استفاده کنند تا اطمینان حاصل شود که پانلهای خورشیدی در مؤثرترین جهت خود به سمت خورشید باقی میمانند، و نیازهای انرژی بیشتر را میتوان از طریق افزودن و جهتگیری آرایههای خورشیدی قابل استقرار برآورده کرد، که میتواند به طور قابلتوجهی باز شود. منطقه بزرگتر در مدار نوآوریهای اخیر شامل آرایههای خورشیدی اضافی با فنر است که به محض رها شدن ماهواره مستقر میشوند، و همچنین آرایههایی که دارای مکانیسمهای چاقوی حرارتی هستند که در صورت فرمان، پانلها را مستقر میکنند. CubeSats ممکن است بین راه اندازی و استقرار تغذیه نشود، و باید دارای یک پین حذف قبل از پرواز باشد که برای جلوگیری از عملکرد در حین بارگیری در P-POD، تمام برق را قطع می کند. علاوه بر این، یک سوئیچ استقرار زمانی که سفینه در یک P-POD بارگیری میشود، فعال میشود و برق فضاپیما را قطع میکند و پس از خروج از P-POD غیرفعال میشود
مخابرات
قابل استقرار high-gآنتن بازتابنده مش مشبک که در باند کا برای رادار در یک CubeSat (RaInCube) کار می کند.
هزینه پایین CubeSats دسترسی بیسابقهای به فضا را برای مؤسسات و سازمانهای کوچکتر فراهم کرده است، اما برای اکثر اشکال CubeSat، برد و توان موجود برای آنتنهای ارتباطی آن به حدود 2 وات محدود شده است.
به دلیل غلت زدن و برد کم توان، ارتباطات رادیویی یک چالش هستند. بسیاری از CubeSat ها از یک آنتن تک قطبی یا دوقطبی همه جانبه استفاده می کنند که با نوار اندازه گیری تجاری ساخته شده است. برای نیازهای بیشتر، برخی از شرکتها آنتنهای با بهره بالا را برای CubeSats ارائه میکنند، اما استقرار و سیستمهای اشارهگر آنها بهطور قابلتوجهی پیچیدهتر است
آنتن ها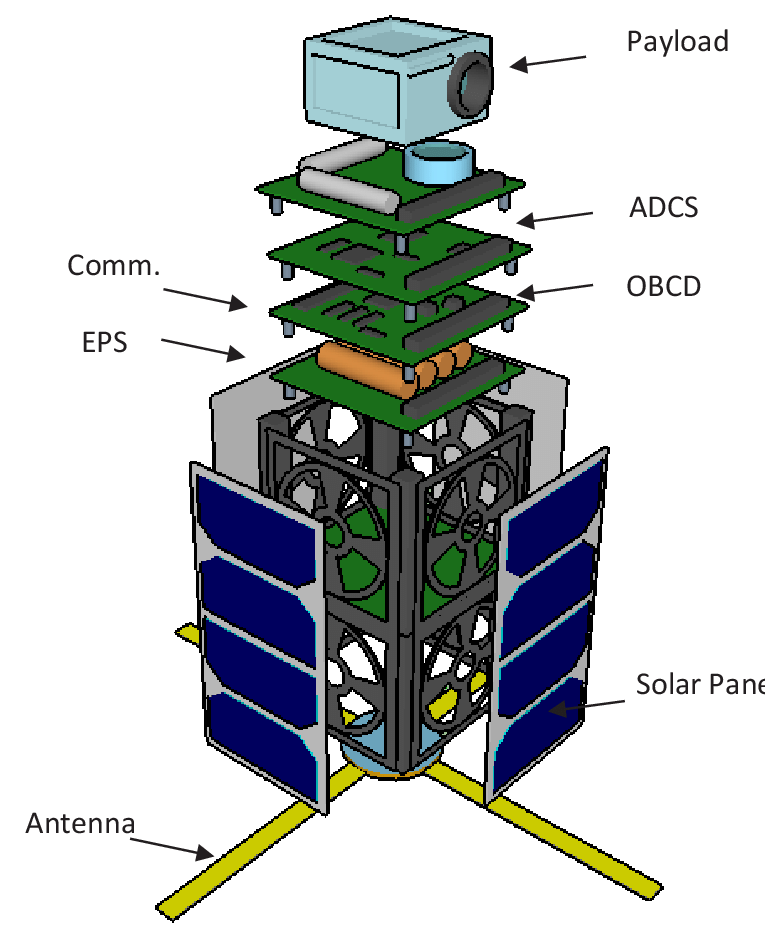
به طور سنتی، Cubesats مدار پایین زمین از آنتن ها برای اهداف ارتباطی در باند UHF و S استفاده می کنند.
اجزای مورد استفاده برای اطمینان از برآورده شدن دمای مورد نیاز در CubeSats شامل عایق چند لایه و گرم کننده برای باتری است. سایر تکنیکهای کنترل حرارتی فضاپیما در ماهوارههای کوچک شامل قرار دادن اجزای خاص بر اساس خروجی حرارتی مورد انتظار از آن اجزا و به ندرت دستگاههای حرارتی مستقر مانند لوورها است. تجزیه و تحلیل و شبیه سازی مدل حرارتی فضاپیما یک عامل تعیین کننده مهم در به کارگیری مولفه ها و تکنیک های مدیریت حرارتی است. CubeSats با نگرانیهای حرارتی خاص، که اغلب با مکانیزمهای استقرار و محمولههای خاص همراه است، ممکن است قبل از پرتاب در یک محفظه خلاء حرارتی آزمایش شوند. چنین آزمایشی نسبت به ماهواره های با اندازه کامل اطمینان بیشتری را ارائه می دهد، زیرا CubeSat ها به اندازه کافی کوچک هستند که به طور کامل در داخل یک محفظه خلاء حرارتی قرار می گیرند. سنسورهای دما معمولاً روی اجزای مختلف CubeSat قرار میگیرند تا اقداماتی برای جلوگیری از محدودههای دمایی خطرناک انجام شود، مانند تغییر جهت کشتی به منظور جلوگیری یا وارد کردن تشعشعات حرارتی مستقیم به یک بخش خاص و در نتیجه اجازه خنک شدن یا گرم شدن آن.اندازه آنها می تواند 1U، 2U، 3U یا 6U باشد و معمولاً وزن آنها کمتر از 1.33 کیلوگرم (3 پوند) در هر U است
بیایید با یک cubesat (شاید 3U) با جرم 5 کیلوگرم شروع کنیم و یک پیشرانه درایو EM کوچک شده از یک نیروی محرکه ساده برای 5 وات استفاده کنیم:
$0.005 kW × 1 mN/kW = 5E-06 Newtons.$.
از آنجایی که نیرو بسیار ناچیز است، حداقل باید سعی کنیم تا حد امکان از کشش اتمسفر جلوگیری کنیم. بیایید یک مدار دایره ای اولیه با ارتفاع 800 کیلومتر انتخاب کنیم. با استفاده از شعاع استوایی 6378 کیلومتر. محور نیمه اصلی اولیه (بر حسب متر) خواهد بود:
$a_i = (6378 + 800) \ \times \ 1000$
با استفاده از معادله vis-viva، تنظیم r = a برای یک مدار دایره ای و با استفاده از مقدار $3.986004418E+14 m^3/s^2$ برای پارامتر گرانشی استاندارد زمین GMe، سرعت مدار اولیه به صورت زیر خواهد بود:
$v_i = \sqrt{GM_e \ / \ a}$
یا حدود 7451.9 متر بر ثانیه.
شروع با برخی از فیزیک نیوتنی پایه:
$\Delta p = Force \times time$
$\Delta v = Force \times time \ / \ mass$
پنج میکرو نیوتن به مدت 30 روز در برابر جرم 5 کیلوگرم، Δv برابر با 2.6 متر بر ثانیه می دهد، بنابراین بله، محاسبه سریع شما خوب است.
که برای یک قانون سرانگشتی خوب برای شتابهای فقط مماسی بسیار کم که منجر به یک مارپیچ تدریجی بین دو مدار دایرهای همسطح میشود، تغییر در سرعت مداری کل Δv منفی خواهد بود. بنابراین در حد رانش صفر و زمان نامتناهی، یک Δv کل در جهت مماسی حرکت در واقع سرعت مداری فضاپیما را به میزان Δv کاهش میدهد در حالی که به طور همزمان ارتفاع مدار را افزایش میدهد!
به طوری که یک سرعت مداری نهایی را می دهد:
$v_f = v_i - \Delta v$
یا $ 7451.9 - 2.6 = 7449.3 m/s.$. با استفاده از معادله vis-viva دوباره "در معکوس" محور نیمه اصلی نهایی به صورت زیر خواهد بود:
$a_f = (GM_e / v_f)^2$
یا حدود 7183.0 کیلومتر، افزایش 5 کیلومتر. دوره یک مدار دایره ای فقط دور تقسیم بر سرعت است:
$T = 2 \pi a / v$
،بنابراین دوره زمانی 6 ثانیه تغییر می کند، از حدود 6052 به 6058 ثانیه، که به این معنی است که موقعیت های مکعبی در این دو مدار پس از هر گردش 100 دقیقه ای، 42 کیلومتر دیگر از هم فاصله می گیرند.
بنابراین در واقع، فاززدایی روشی بسیار حساستر از جستجوی تغییر ارتفاع خواهد بود (همانطور که قبلاً در اینجا ذکر کردم)، و بدون در نظر گرفتن همه مشکلات دیگر، باید نسبت به Δv بسیار کمتر از این حساس باشد.
CubeSats در حال حاضر معمولا در مدار پایین زمین برای کاربردهایی مانند سنجش از راه دور و ارتباطات استفاده میشن.CubeSat شامل اجزای زیادی است که می توانند به شش زیر سیستم اصلی تقسیم کنیم ساختار. ارتباط؛ قدرت؛ تعیین و کنترل نگرش؛ کنترل فرمان و داده ها؛ و محموله
شما جعبه ای را در فضا تصور کنید که به اندازه یک جعبه دستمال کاغذی بلند است و می تواند از زمین عکس بگیرد. این دقیقاً همان کاری است که Planet Labs انجام میدهد: آنها از یک 3U (یک CubeSat 10×10×34 سانتیمتری) به نام Dove استفاده میکنند
CubeSats چگونه کار میکنه
CubeSat نوعی ماهواره کوچک برای تحقیقات فضاییه که از چندین واحد مکعب 10×10×11.35 سانتیمتر یا یک U منفرد تشکیل شده است که واحد اندازهگیری CubeSats است. CubeSat ها وزنی بیش از 1.33 کیلوگرم در واحد ندارن آنها در مدار پایین زمین (LEO) که دارای ارتفاعی بین 160 کیلومتر تا 2000 کیلومتر است شناور هستند و تقریباً هر 90 دقیقه یک بار به دور زمین می چرخند.
CubeSat ها معمولاً از طریق Nanoracks CubeSat Deployer (NRCSD) یا Poly Picosat Orbital Deployer (P-POD) مستقر می شوند. NRCSD یک سیستم توزیع کننده CubeSat مستقل و واجد شرایط ایمنی پرواز ISS ناسا است که به صورت مکانیکی و الکتریکی CubeSat ها را از ایستگاه فضایی بین المللی، وسایل نقلیه تامین بار و خدمه ISS جدا می کند. NRCSD قادر است شش واحد CubeSat را نگه دارد: 1U، 2U، 3U، 4U، 5U، و 6U (2×3 و 1×6) CubeSats. P-Pod به CubeSat اجازه می دهد تا از پرتابگر جدا شود و برای حمل سه CubeSat استاندارد طراحی شده است. CubeSats باید با الزامات NRCSD یا P-POD سازگار باشد که شامل موارد کلی، ابعاد، جرم، الکتریکی و عملیاتی است.
ساختار
اندازه CubeSat ها از 1 U تا 3 U است. طول و عرض آنها همیشه 10×10 سانتی متر است، اما ارتفاع آنها می تواند از 11.35 تا 34.05 سانتی متر متغیر باشد. مصالح مجاز سازه آلیاژهای آلومینیوم 7075، 6061، 5005 و 5052 می باشد و برای جلوگیری از جوش سرد نیاز به آنودایز دارند.
ارتباط
سیستم ارتباطی (COM) به شدت توسط مقدار توان موجود محدود شده است که معمولاً حدود 2 وات است.
CubeSats از سیستم های ارتباط رادیویی در باند VHF، UHF، F-، S-، C- و X استفاده می کند. این ماهواره از یک آنتن استفاده می کند که معمولاً یک بار در مدار قرار می گیرد تا به ارتباطات کمک کند.
قدرت
سیستم برق (EPS) از پنل های خورشیدی و باتری ها تشکیل شده است. پنل های خورشیدی سلول های خورشیدی را نگه می دارند که نور خورشید را از خورشید به الکتریسیته تبدیل می کنند. باتری ها جرم و حجم زیادی را در CubeSat که قبلاً محکم بسته بندی شده است می گیرند. یکی از چالش های اصلی طراحی، قرار دادن پنل های خورشیدی، یا در کناره های خود CubeSat، یا استقرار پنل های خورشیدی است. داشتن پانلهای قابل استقرار، مساحت سلولهای خورشیدی را اضافه میکند اما پیچیدگی مکانیکی بیشتری را نیز به همراه دارد. برای استقرار پانل ها، آنها به مکانیزم رهاسازی سیم سوختگی نیاز دارند و هر سیستم مکانیکی احتمال خرابی را اضافه می کند. اگر پنل به درستی مستقر نشود، CubeSat هیچ برقی نخواهد داشت و حتی اگر همه چیز به درستی کار کند، CubeSat به دلیل کمبود برق از کار می افتد.
کنترل
سیستم تعیین و کنترل نگرش (ADCS) جهت گیری CubeSat را با توجه به چارچوب مرجع اینرسی کنترل می کند و شامل چرخ های واکنش، مغناطیس کننده ها، رانشگرها، ردیاب های ستاره، سنسورهای خورشید و زمین، سنسورهای نرخ زاویه ای و گیرنده ها و آنتن های GPS است. این سیستم پیچیده مورد نیاز است زیرا زمانی که ماهواره برای اولین بار به کار گرفته می شود،
ظرفیت ترابری
محموله یا هدف CubeSat بسته به نوع ماموریت مورد نیاز به طور چشمگیری متفاوت است
فتومتر
در پایین ماهواره قرار گرفته است تا رو به زمین باشد و اتمسفر را بخواند.
دیودهای خاموش کننده فتومتر
در کنار نورسنج که در همان جهت قرار دارد.
دوربین
در پایین ماهواره قرار گرفته تا دائماً رو به زمین و زمین باشد و از آن عکس بگیرید.
کویل های گشتاور
یک سیم پیچ گشتاور عمود بر هر محور برای کنترل وضعیت مناسب نصب شده است.
باتری ها
باتریها سنگینترین و بزرگترین جسم روی هواپیما هستند، به همین دلیل در یک طرف تا حد امکان نزدیک به مرکز هندسی قرار دارند و مشکلات CG و فضای اشغال شده را به حداقل میرسانند.
آنتن
در بالای ماهواره قرار دارد که طول قابل استقرار آن را به حداکثر می رساند.
واحد پردازش قدرت رانشگر
این واحد به عایق ارتعاشی نیاز دارد و بر روی چهار پایه نصب می شود، این نیاز به نصب محکم در پایین ماهواره دارد.
رانشگرها
چهار رانشگر در طرف مقابل ماهواره در گوشه های مخالف قرار گرفته اند تا توانایی کنترل را به حداکثر برسانند.چندین سیستم رانش گاز سرد برای پلت فرم CubeSat توسعه داده شده است و آنها بالغ ترین نوع پیشرانه برای CubeSats هستند. پیشران های رایج مورد استفاده برای سیستم های گاز سرد شامل نیتروژن، بوتان، هگزا فلوراید گوگرد مایع، آرگون، زنون، R134a و R236fa می باشد.
چشمه های جداسازی
پاها تنها بخشی از کیوب ست ها هستند که با دیگر کیوب ست ها تماس می گیرند، بنابراین فنرهایی در آنجا قرار دارند تا به جداسازی ماهواره ها در هنگام استقرار در مدار کمک کنند.
سوئیچ ها
سوئیچ ها نیز روی پاها قرار دارند و در PPOD فشرده می شوند، پس از استقرار آنها باز می شوند و اجازه می دهند ماهواره روشن شود.
پین بکش
پین کش در وسط ماهواره قرار دارد، به طوری که با یکی از پنجره های PPOD در یک خط قرار دارد. این یک سوئیچ اضافی است که برق را قطع می کند و می توان آن را قبل از راه اندازی از طریق پنجره جدا کرد.
تابلو برق و تابلو کنترل نگرش
این تخته ها به صورت افقی روی هم نصب می شوند تا فضای اشغال شده را به حداقل برسانند.
پردازنده SID
در مرکز قرار گرفته تا طول سیم را به حداقل برساند.
تابلوی ردیابی پاور پوینت
اندازه این برد به گونه ای بود که در کنار برد آنتن قرار گیرد تا فضای بالای ماهواره را به حداکثر برساند.
رادیو
برد رادیویی در وسط ماهواره تا حد امکان نزدیک به برد رادیویی نصب می شود تا طول سیم به حداقل برسد.
کنترل گره ترمینال
این برد روی یک برد مجاور به رادیو و پردازنده SID قرار داشت تا طول سیم بین سه برد به حداقل برسد.
کنترل حرارتی
برای موفقیت در این ماموریت، ماهواره باید در محیط سخت فضایی سالم بمونه. دما در فضا از 120 درجه سانتیگراد در نور مستقیم خورشید تا -100 درجه سانتیگراد در سایه زمین متغیر است و آن را به یکی از خشن ترین محیط های قابل تصور تبدیل می کند. متأسفانه سیستم های ماهواره در این محدوده دمایی کار نخواهند کرد، بنابراین محیط حرارتی آن باید کنترل شود. در حالی که دمای فضا به خودی خود وحشیانه است، نوسانات سریع دما نیز مشکلاتی را ایجاد می کند. در طول هر چرخش به دور زمین، فضاپیما ممکن است هر دو درجه حرارت را تحمل کند.
سه مرحله از مأموریت بر سیستم کنترل حرارتی (TCS) تأثیر می گذارد: پرتاب، قرارگیری مداری توسط پرتابگر و مدار نهایی. پرتابگر دمای مناسب برای دو مرحله اول این ماموریت را فراهم می کند. مدار نهایی تعیین می کند که کدام TCS باید برای هر جزء استفاده شود. هر جزء دارای محدوده دمای عملیاتی خاص خود است. حتی زمانی که عملیاتی نیست، توصیه نمی شود برای مدت طولانی خارج از محدوده دمای عملیاتی قرار بگیرید.CubeSats را می توان در فضای نسبتاً کوچک خالی روی یک پرتابگر نصب کرد.
پیشرانه الکتریکی CubeSat معمولاً از انرژی الکتریکی برای شتاب دادن پیشرانه به سرعت بالا استفاده می کند که منجر به ضربه ویژه بالا می شود. بسیاری از این فناوریها را میتوان به اندازه کافی برای استفاده در نانوماهوارهها کوچک کرد و چندین روش در حال توسعه هستند. انواع پیشرانه های الکتریکی که در حال حاضر برای استفاده در CubeSats طراحی شده اند عبارتند از: پیشرانه های جلوه هال، رانشگرهای یونی، رانشگرهای پلاسما پالسی، رانشگرهای الکترواسپری، و رزیستوجت ها. چندین ماموریت قابل توجه CubeSat قصد دارند از نیروی محرکه الکتریکی استفاده کنند، مانند مکعب یخ ماه ناسا راندمان بالای مرتبط با نیروی محرکه الکتریکی می تواند به CubeSats اجازه دهد تا خود را به سمت مریخ برانند سیستم های نیروی محرکه الکتریکی در استفاده از انرژی خود دارای ضعف هستند، که به CubeSat نیاز دارد که سلول های خورشیدی بزرگتر، توزیع نیرو پیچیده تر، و اغلب باتری های بزرگتر داشته باشد. علاوه بر این، بسیاری از روشهای نیروی محرکه الکتریکی ممکن است همچنان به مخازن تحت فشار برای ذخیره پیشران نیاز داشته باشند، که توسط مشخصات طراحی CubeSat محدود شده است.
ESTCube-1 از بادبان برقی خورشیدی-بادی استفاده کرد که به میدان الکترومغناطیسی متکی است تا به جای یک ماده جامد به عنوان بادبان عمل کند. این فناوری از یک میدان الکتریکی برای انحراف پروتون ها از باد خورشیدی برای تولید نیروی رانش استفاده می کرد. این شبیه به یک اتصال الکترودینامیکی است که کشتی برای کار کردن فقط نیاز به تامین برق دارد.
بادبان خورشیدی
بادبان های خورشیدی (که بادبان های نوری یا بادبان های فوتونی نیز نامیده می شوند) شکلی از رانش فضاپیما هستند که از فشار تابشی (که فشار خورشیدی نیز نامیده می شود) از ستارگان برای فشار دادن آینه های بزرگ فوق العاده نازک به سرعت های بالا استفاده می کنند و نیازی به پیشران ندارند. نیروی ناشی از مقیاس بادبان خورشیدی با مساحت بادبان، باعث میشود بادبانها برای استفاده در CubeSats مناسب باشند، زیرا جرم کوچک آنها باعث شتاب بیشتر برای منطقه بادبان خورشیدی معین میشود. با این حال، بادبان های خورشیدی هنوز باید در مقایسه با ماهواره بسیار بزرگ باشند، به این معنی که بادبان های خورشیدی مفید باید مستقر شوند و پیچیدگی مکانیکی و منبع بالقوه شکست را اضافه کنند. این روش پیشرانه تنها روشی است که با محدودیت های تعیین شده توسط CubeSat Design Specification مواجه نیست، زیرا به فشار بالا، مواد خطرناک یا انرژی شیمیایی قابل توجهی نیاز ندارد. تعداد کمی از CubeSat ها از بادبان خورشیدی به عنوان نیروی محرکه و پایداری اصلی خود در اعماق فضا استفاده کرده اند
قدرت
پنل های خورشیدی Winglet باعث افزایش سطح برای تولید برق می شود
CubeSats از سلولهای خورشیدی برای تبدیل نور خورشید به الکتریسیته استفاده میکند که سپس در باتریهای لیتیوم یونی قابل شارژ ذخیره میشود که انرژی را در زمان کسوف و همچنین در زمان اوج بار فراهم میکنند. این ماهوارهها سطح محدودی روی دیوارههای خارجی خود برای مونتاژ سلولهای خورشیدی دارند و باید به طور مؤثر با سایر بخشها مانند آنتنها، حسگرهای نوری، لنز دوربین، سیستمهای پیشرانه و پورتهای دسترسی به اشتراک گذاشته شوند. باتریهای لیتیوم یون دارای نسبت انرژی به جرم بالایی هستند که آنها را برای استفاده در فضاپیماهای دارای محدودیت جرم مناسب میسازد. شارژ و دشارژ باتری معمولاً توسط یک سیستم برق اختصاصی (EPS) انجام می شود. باتریها گاهی اوقات دارای گرمکنهایی هستند تا از رسیدن باتری به دمای پایین خطرناکی که ممکن است باعث شکست باتری و ماموریت شود جلوگیری کند.
سرعت پوسیدگی باتریها به تعداد چرخههایی که برای آنها شارژ و دشارژ میشوند و همچنین به عمق هر تخلیه بستگی دارد: هرچه میانگین عمق تخلیه بیشتر باشد، باتری سریعتر تحلیل میرود. برای مأموریتهای LEO، میتوان انتظار داشت که تعداد سیکلهای تخلیه حدود چند صد باشد.
به دلیل محدودیتهای اندازه و وزن، CubeSats معمولی که در LEO با پنلهای خورشیدی روی بدنه پرواز میکنند کمتر از 10 وات تولید کردهاندماموریتهای با نیاز به توان بالاتر میتوانند از کنترل نگرش استفاده کنند تا اطمینان حاصل شود که پانلهای خورشیدی در مؤثرترین جهت خود به سمت خورشید باقی میمانند، و نیازهای انرژی بیشتر را میتوان از طریق افزودن و جهتگیری آرایههای خورشیدی قابل استقرار برآورده کرد، که میتواند به طور قابلتوجهی باز شود. منطقه بزرگتر در مدار نوآوریهای اخیر شامل آرایههای خورشیدی اضافی با فنر است که به محض رها شدن ماهواره مستقر میشوند، و همچنین آرایههایی که دارای مکانیسمهای چاقوی حرارتی هستند که در صورت فرمان، پانلها را مستقر میکنند. CubeSats ممکن است بین راه اندازی و استقرار تغذیه نشود، و باید دارای یک پین حذف قبل از پرواز باشد که برای جلوگیری از عملکرد در حین بارگیری در P-POD، تمام برق را قطع می کند. علاوه بر این، یک سوئیچ استقرار زمانی که سفینه در یک P-POD بارگیری میشود، فعال میشود و برق فضاپیما را قطع میکند و پس از خروج از P-POD غیرفعال میشود
مخابرات
قابل استقرار high-gآنتن بازتابنده مش مشبک که در باند کا برای رادار در یک CubeSat (RaInCube) کار می کند.
هزینه پایین CubeSats دسترسی بیسابقهای به فضا را برای مؤسسات و سازمانهای کوچکتر فراهم کرده است، اما برای اکثر اشکال CubeSat، برد و توان موجود برای آنتنهای ارتباطی آن به حدود 2 وات محدود شده است.
به دلیل غلت زدن و برد کم توان، ارتباطات رادیویی یک چالش هستند. بسیاری از CubeSat ها از یک آنتن تک قطبی یا دوقطبی همه جانبه استفاده می کنند که با نوار اندازه گیری تجاری ساخته شده است. برای نیازهای بیشتر، برخی از شرکتها آنتنهای با بهره بالا را برای CubeSats ارائه میکنند، اما استقرار و سیستمهای اشارهگر آنها بهطور قابلتوجهی پیچیدهتر است
آنتن ها
به طور سنتی، Cubesats مدار پایین زمین از آنتن ها برای اهداف ارتباطی در باند UHF و S استفاده می کنند.
اجزای مورد استفاده برای اطمینان از برآورده شدن دمای مورد نیاز در CubeSats شامل عایق چند لایه و گرم کننده برای باتری است. سایر تکنیکهای کنترل حرارتی فضاپیما در ماهوارههای کوچک شامل قرار دادن اجزای خاص بر اساس خروجی حرارتی مورد انتظار از آن اجزا و به ندرت دستگاههای حرارتی مستقر مانند لوورها است. تجزیه و تحلیل و شبیه سازی مدل حرارتی فضاپیما یک عامل تعیین کننده مهم در به کارگیری مولفه ها و تکنیک های مدیریت حرارتی است. CubeSats با نگرانیهای حرارتی خاص، که اغلب با مکانیزمهای استقرار و محمولههای خاص همراه است، ممکن است قبل از پرتاب در یک محفظه خلاء حرارتی آزمایش شوند. چنین آزمایشی نسبت به ماهواره های با اندازه کامل اطمینان بیشتری را ارائه می دهد، زیرا CubeSat ها به اندازه کافی کوچک هستند که به طور کامل در داخل یک محفظه خلاء حرارتی قرار می گیرند. سنسورهای دما معمولاً روی اجزای مختلف CubeSat قرار میگیرند تا اقداماتی برای جلوگیری از محدودههای دمایی خطرناک انجام شود، مانند تغییر جهت کشتی به منظور جلوگیری یا وارد کردن تشعشعات حرارتی مستقیم به یک بخش خاص و در نتیجه اجازه خنک شدن یا گرم شدن آن.اندازه آنها می تواند 1U، 2U، 3U یا 6U باشد و معمولاً وزن آنها کمتر از 1.33 کیلوگرم (3 پوند) در هر U است
بیایید با یک cubesat (شاید 3U) با جرم 5 کیلوگرم شروع کنیم و یک پیشرانه درایو EM کوچک شده از یک نیروی محرکه ساده برای 5 وات استفاده کنیم:
$0.005 kW × 1 mN/kW = 5E-06 Newtons.$.
از آنجایی که نیرو بسیار ناچیز است، حداقل باید سعی کنیم تا حد امکان از کشش اتمسفر جلوگیری کنیم. بیایید یک مدار دایره ای اولیه با ارتفاع 800 کیلومتر انتخاب کنیم. با استفاده از شعاع استوایی 6378 کیلومتر. محور نیمه اصلی اولیه (بر حسب متر) خواهد بود:
$a_i = (6378 + 800) \ \times \ 1000$
با استفاده از معادله vis-viva، تنظیم r = a برای یک مدار دایره ای و با استفاده از مقدار $3.986004418E+14 m^3/s^2$ برای پارامتر گرانشی استاندارد زمین GMe، سرعت مدار اولیه به صورت زیر خواهد بود:
$v_i = \sqrt{GM_e \ / \ a}$
یا حدود 7451.9 متر بر ثانیه.
شروع با برخی از فیزیک نیوتنی پایه:
$\Delta p = Force \times time$
$\Delta v = Force \times time \ / \ mass$
پنج میکرو نیوتن به مدت 30 روز در برابر جرم 5 کیلوگرم، Δv برابر با 2.6 متر بر ثانیه می دهد، بنابراین بله، محاسبه سریع شما خوب است.
که برای یک قانون سرانگشتی خوب برای شتابهای فقط مماسی بسیار کم که منجر به یک مارپیچ تدریجی بین دو مدار دایرهای همسطح میشود، تغییر در سرعت مداری کل Δv منفی خواهد بود. بنابراین در حد رانش صفر و زمان نامتناهی، یک Δv کل در جهت مماسی حرکت در واقع سرعت مداری فضاپیما را به میزان Δv کاهش میدهد در حالی که به طور همزمان ارتفاع مدار را افزایش میدهد!
به طوری که یک سرعت مداری نهایی را می دهد:
$v_f = v_i - \Delta v$
یا $ 7451.9 - 2.6 = 7449.3 m/s.$. با استفاده از معادله vis-viva دوباره "در معکوس" محور نیمه اصلی نهایی به صورت زیر خواهد بود:
$a_f = (GM_e / v_f)^2$
یا حدود 7183.0 کیلومتر، افزایش 5 کیلومتر. دوره یک مدار دایره ای فقط دور تقسیم بر سرعت است:
$T = 2 \pi a / v$
،بنابراین دوره زمانی 6 ثانیه تغییر می کند، از حدود 6052 به 6058 ثانیه، که به این معنی است که موقعیت های مکعبی در این دو مدار پس از هر گردش 100 دقیقه ای، 42 کیلومتر دیگر از هم فاصله می گیرند.
بنابراین در واقع، فاززدایی روشی بسیار حساستر از جستجوی تغییر ارتفاع خواهد بود (همانطور که قبلاً در اینجا ذکر کردم)، و بدون در نظر گرفتن همه مشکلات دیگر، باید نسبت به Δv بسیار کمتر از این حساس باشد.
-
Aylar Nedaei
عضویت : سهشنبه ۱۴۰۱/۹/۲۲ - ۱۴:۲۶
پست: 1-
بهینه سازی مسیر حرکت ماهواره بر با الگوریتم pso با استفاده از زاویه گاما
با سلام و وقت بخیر
من یه پروژه شبیه سازی برای مسیر حرکت بهینه ماهواره بر تو نرم افزار متلب دارم و و برای بهینه سازی از الگوریتم pso قصد دارم استفاده کنم، خواستم از دوستان راهنمایی بگیرم آیا منابع خوب تو زمینه بهینه سازی مسیر ماهواره برا میشناسن که به من معرفی کنن چون اولین باره تو این زمینه وارد شدم کلا برام گنگه. ممنون میشم اگه منو راهنمایی کنید.
من یه پروژه شبیه سازی برای مسیر حرکت بهینه ماهواره بر تو نرم افزار متلب دارم و و برای بهینه سازی از الگوریتم pso قصد دارم استفاده کنم، خواستم از دوستان راهنمایی بگیرم آیا منابع خوب تو زمینه بهینه سازی مسیر ماهواره برا میشناسن که به من معرفی کنن چون اولین باره تو این زمینه وارد شدم کلا برام گنگه. ممنون میشم اگه منو راهنمایی کنید.
-
rohamavation
نام: roham hesami radرهام حسامی راد
محل اقامت: 100 مایلی شمال لندن جاده آیلستون، لستر، لسترشر. LE2
عضویت : سهشنبه ۱۳۹۹/۸/۲۰ - ۰۸:۳۴
پست: 3286-
سپاس: 5494
- جنسیت:
تماس:
Re: هوافضا
منظورت الگوریتم ازدحام ذرات PSO (Particle swarm optimization)
پاسخ های محتمل به مساله بهینه سازی را ذره میگن. بنابراین ذرات همان عامل جستجوهستند
گروه ذرات: به مجموعه ای ذرات (جواب های محتمل برای مساله بهینه سازی) گروه یا Swarm میگیم. تعداد ذرات در هر گروه swarm size هست
رهبر گروه پس از هر تکرار یک ذره در گروه دارای بهترین جوابه (best fitness). این ذره رهبر گروه در آن تکراره که سایر ذرات در تکرار بعدی سعی دارن به این مقدار نزدیک بشن. (Gbest)
موقعیت برتر هر ذره خود به تنهایی موقعیت فعلی خود را با موقعیت قبلی مقایسه می کند و بهترین حالت را در حافظه خود ذخیره می کنه. در تکرار های بعدی علاوه بر در نظر گرفتن موقعیت بر تر خود سعی در خیزش به سمت موقعیت رهبر گروه را نیز دارد. (Pbest)
standard pso
PSO در متلب
برای پیاده سازی PSO در نرم افزار متلب تابع particleswarm هست. این تابع در ورودی موارد زیر را از کاربر میخواد
اسم تابع
تعداد متغیر ها
بردار حداقل ذرات
بردار حداکثر ذرات
آپشن های کنترلی در اجرای الگوریتم
$[x,fval,exitflag,output] = particleswarm(fun,nvars,lb,ub,options)$
مقدار ذره بهینه
مقدار best function
عاملی که باعث توقف الگوریتم شده
خروجی عملکرد الگوریتم
$
2
3
4
5
fun = @(x)x(1)*exp(-norm(x)^2);
lb = [-10,-15];
ub = [15,20];
nvars = 2;
[x,fval,exitflag,output] = particleswarm(fun,nvars,lb,ub)
$
مشکل برنامه ریزی مسیر ABC + PSO در اینجا خوب سیستم سعی می کنه بهینه ترین مسیر را بین نقطه شروع و نقطه مقصد با کمک الگوریتم Artificial Bee Colony (ABC) و الگوریتم بهینه سازی ازدحام ذرات ترکیبی پیدا کنه. یک خط منحنی سعی میکنه بهترین مسیر را پیدا کنه. برنامه ریزی مسیر ABC+PSO
PSO(الگوریتم بهینه سازی ازدحام ذرات PSO) از دسته الگوریتم های بهینه سازی است که بر مبنای تولید تصادفی جمعیت اولیه عمل میکنه. هر عضو در این گروه توسط بردار سرعت و بردار موقعیت در فضای جستجو تعریف می گرده. در هر تکرار زمانی موقعیت جدید ذرات با توجه به برار سرعت و بردار موقعیت در فضای جستجو تعریف میشه. در هر تکرار زمانی، موقعیت جدید ذرات با توجه به بردار سرعت فعلی بهترین موقعیت یافت شده توسط آن ذره و بهترین موقعیت یافت شده توسط بهترین ذره موجود در گروه، به روز رسانی میشه. این الگوریتم برای پارامتر پیوسته و گسسته تعریف شده. خوب الگوریتم بهینه سازی ازدهام ذرات را در حالت گسسته با (BPSO) معرفی میشه. در این الگوریتم موقعیت هر ذره با مقدار یک تعریف می گردد. در این الگوریتم موقعیت هر ذره با مقدارباینری صفر و یا یک نشون میدیم . در BPSO مقدار هر ذره می تواند از صفر به یک و یا از یک به صفر تغییر کنه. سرعت هر ذره نیز به عنوان احتمال تغییر هر ذره به مقدار یک تعریف می گرده. یک روش بهینهسازی قوی برای حل مسئله طراحی مسیر وسیله نقلیه پرتاب ماهواره (SLV) در حضور عدم قطعیت با استفاده از یک الگوریتم قدرتمند بهینهسازی ازدحام ذرات (PSO) با توجه به عدم قطعیت هایی مانند عدم قطعیت در مقادیر واقعی ضرایب آیرودینامیکی، نیروی رانش موتور و جرم در مرحله صعود یک SLV، دستیابی به یک مسیر بهینه که در برابر این عدم قطعیت ها مقاوم باشه، مهم است. زیرا عملکرد پرواز را بهبود می بخشه و حجم کار سیستم هدایت-کنترل را کاهش میده و قابلیت اطمینان ماهواره را بالا میبره.
چگونه می توان عناصر مداری را با استفاده از بردارهای موقعیت/سرعت به صورت برنامه ای محاسبه کرد؟
به طور خاص، من می خواهم با محاسبه عناصر Keplarian شروع کنم. ورودی هایی که به برنامه می دهم بردار موقعیت و سرعت همراه با زمان خواهد بود. این بردارهای ورودی نسبت به مرکز زمین خواهند بود، بنابراین اگر بخواهم از یک مکان خاص روی سطح به عنوان نقطه مرجع استفاده کنم، ممکن است نیاز به انتقال مختصات داشته باشم.
.با توجه به بردارهای موقعیت و سرعت زمین محور، اینرسی (ECI) $\vec{r}$ و $\vec{v}$، می توانید مستقیماً عناصر مداری کلاسیک $(a,e,i,\Omega,\omega,\nu)$ را به صورت زیر حل کنید (ابتدا الگوریتم ها و سپس کد شبه در پایین):
ابتدا تکانه زاویه ای را حل کنید
$\vec{h}=\vec{r} \times \vec{v}$
سپس بردار گره
$\hat{n}=\hat{K} \times \vec{h}$
که بعدا مورد استفاده قرار خواهد گرفت.
بردار خروج از مرکز پس از آن است
$\vec{e} = \frac{(v^2-\mu /r)\vec{r}-(\vec{r} \cdot \vec{v})\vec{v}}{\mu}$
و$e=|\vec{e}|$
انرژی مکانیکی ویژه است
$E=\frac{v^2}{2}-\frac{\mu}{r}$
اگر e≠1، پس
$a = -\frac{\mu}{2E}$
$p=a(1-e^2)$
در غیر این صورت،
$p=\frac{h^2}{\mu}$
$a=\infty$
اکنون،
$i=\cos^{-1}{\frac{h_K}{h}}$
$\Omega=\cos^{-1}{\frac{n_I}{n}}$
$\omega=\cos^{-1}{\frac{\vec{n}\cdot\vec{e}}{ne}}$
$\nu=\cos^{-1}{\frac{\vec{e}\cdot\vec{r}}{er}}$
و باید بررسی های زیر را انجام دهید: اگر $n_J<0$، پس $\Omega=360^{\circ}-\Omega$
اگر $e_K<0$، پس $\omega=360^{\circ}-\omega$، و
اگر$\vec{r}\cdot\vec{v}<0$، آنگاه $\nu=360^{\circ}-\nu$
توجه داشته باشید که برای موارد خاص با مشکلاتی (تکینگی) مواجه خواهید شد به ویژه مدارهای دایره ای (e≈0) و مدارهای استوایی (i≈0). در این موارد شما معمولاً یک متغیر جدید و کم دردسر معرفی میکنید، مانند طول جغرافیایی متوسط یا طول جغرافیایی واقعی حضیض.
$h=cross(r,v)
nhat=cross([0 0 1],h)
evec = ((mag(v)^2-mu/mag(r))*r-dot(r,v)*v)/mu
e = mag(evec)
energy = mag(v)^2/2-mu/mag(r)
if abs(e-1.0)>eps
a = -mu/(2*energy)
p = a*(1-e^2)
else
p = mag(h)^2/mu
a = inf
i = acos(h(3)/mag(h))
Omega = acos(n(1)/mag(n))
if n(2)<0
Omega = 360-Omega
argp = acos(dot(n,evec)/(mag(n)*e))
if e(3)<0
argp = 360-argp
nu = acos(dot(evec,r)/(e*mag(r))
if dot(r,v)<0
nu = 360 - nu$
تعاریف اولیه الگوریم PSO
فرض کنید یک فضای جستجوی d بعدی داریم. i اُمین ذره در این فضای d بعدی باب بردار موقعیت Xi اینطور توصیف میکنم
$X_i=(x_(i_1 ),x_(i_2 ),x_(i_3 ),…,x_(i_d ))$
بردار سرعت i اُمین ذره نیز با بردار Vi به شکل زیر تعریف می گردد:
$V_i=(v_(i_1 ),v_(i_2 ),v_(i_3 ),…,v_(i_d ))$
بهترین موقعیتی که ذره i اُم پیدا کرده است را با Pi .best تعریف می کنیم:
$P_(i .best)=(p_(i_1 ),p_(i_2 ),p_(i_3 ),…,p_(i_d )) $
بهترین موقعیتی که بهترین ذره در بین کل ذرات پیدا کرده است را با Pg .best به صورت زیر تعریف می کنیم:
$P_(g .best)=(p_(g_1 ),p_(g_2 ),p_(g_3 ),…,p_(g_d ))$
برای به روز رسانی محل هر کدام از ذرات از رابطه زیر استفاده می کنیم:
$V_i (t)=w*V_i (t-1)+ c_1*〖rand〗_1*(P_(i .best)- X_i (t-1) ) + c_2*〖rand〗_2*(P_(g .best)- X_i (t-1) )$
$X_i= X_i (t-1)+ V_i (t)$
W : ضریب وزنی اینرسی (حرکت در مسیر خودی) که نشان دهنده میزان تأثیر بردار سرعت تکرار قبل 〖(V〗_i (t)) بر روی بردار سرعت در تکرار فعلی 〖(V〗_i (t+1)) است.
c_1 : ضریب ثابت آموزش (حرکت در مسیر بهترین مقدار ذره مورد بررسی)
c_2 : ضریب ثابت آموزش (حرکت در مسیر بهترین ذره یافت شده در بین کل جمعیت)
〖rand〗_1,〖rand〗_2: دو عدد تصادفی با توزیع یکنواخت در بازه 0 تا 1
V_i (t-1) بردار سرعت در تکرار (t-1) ام
X_i (t-1) بردار موقعیت در تکرار (t-1) ام
برای جلوگیری از افزایش بیش از حد سرعت حرکت یک ذره در حرکت از یک محل به محل دیگر (واگرا شدن بردار سرعت)، تغییرات سرعت را به رنج V_max تا V_min محدود می کنیم؛ یعنی V_min≤V ≤ V_max. حد بالا و پایین سرعت با توجه به نوع مسئله تعیین می گردد.
محدود سازی فضا
بعضی از مسائل دامنه تعریفی خاصی برای پارامترهای خود دارند و تنها در این دامنه دارای مقداری محدود، منطقی و تعریف شده هستند. به عبارت دیگر اگر در مسئله مورد بررسی قید و یا قیودی وجود داشته باشد، باید توسط مکانیزمی این قیود لحاظ گردند تا از ورود ذرات به فضای غیر مجاز جلوگیری شود. این مکانیزم را اصطلاحاً محدودسازی فضا می نامند. اگر از این مکانیزم ها استفاده نشود، پاسخ پیدا شه توسط الگوریتم اشتباه و یا غیر قابل اطمینان است. مثلاً تابع زیر برای مقادیر منفی x در اکثر زبان های برنامه نویسی، خطا محسوب می شود.
$f(x)= ∑_(d=1)^D▒〖√x 〗$
مکانیزمی که برای لحاظ کردن این قید استفاده می شود، بصورت زیر است:
$x=max(0,x)$
در تابع فوق مقادیر مجاز x؛ یعنی x≥0 بدون هیچ گونه تغییری نگاشت میشن اما مقادیر غیر مجاز x؛ یعنی x<0 به مقدار مجاز x=0 نگاشت می شوند. در حالت کلی تر اگر بخواهیم محل ذرات بصورت$ 〖[α_min ,α_max]〗^D$ باشد، برای محدودسازی می توان از رابطه زیر استفاده کرد:
$α_d=min〖 {max〖 (〗 〗 X_d ,V_d ,α_min),α_max}$
با استفاده از رابطه فوق محل ذراتی که در خارج از محدوده تعریف شده قرار داشته باشند به داخل محدوده مجاز نگاشت می شوند و محل سایر ذراتی که در محدوده مجاز قرار دارند تغییری داده نمی شود.
مراحل اجرای الگوریتم PSO
بعضاً در مراجع مختلف در نحوه تفکیک مراحل اجرای الگوریتم اختلافاتی دیده میشه یعنی در یک مواقع مراحل بصورت تفکیک شده تری ذکر می شوند و در برخی مواقع دو یا تعداد بیشتری از مراحل را با هم ترکیب کرده و تبدیل به یک مرحله می کنند. اما این موضوع اشکالی در برنامه نویسی های انجام شده ایجاد نمی کند زیرا آنچه که مهم است اجرا شدن مراحل برنامه به ترتیبی که در ادامه خواهد آمد، است و نحوه تفکیک این مراحل. مثلاً در برخی مراجع مرحله 4 و 5 را با هم ترکیب می کنند؛ یعنی مرحله به روز رسانی سرعت ذرات و انتقال ذرات به محل های جدید را به عنوان یک مرحله در نظر می گیرند. این تغییر اشکالی در روند اجرای الگوریتم ایجاد نخواهد کرد.
مرحله 1، تصادفی جمعیت اولیه ذرات
تولید تصادفی جمعیت اولیه بطور ساده عبارت است از تعیین تصادفی محل اولیه ذرات با توزیع یکنواخت در فضای حل (فضای جستجو). مرحله تولید تصادفی جمعیت اولیه تقریباً در تمامی الگوریتم های بهینه سازی احتمالاتی وجود دارد. اما در این الگوریتم علاوه بر محل تصادفی اولیه ذرات، مقداری برای سرعت اولیه ذرات نیز اختصاص می یابد. رنج پیشنهادی اولیه برای سرعت ذرات را می توان از رابطه زیر استخراج کرد.
(X_min- X_max)/2 ≤V ≤ (X_max- X_min)/2
انتخاب تعداد ذرات اولیه
می دانیم که افزایش تعداد ذرات اولیه موجب کاهش تعداد تکرارهای لازم برای همگرا شدن الگوریتم می گردد. اما گاهی مشاهده می شود که کاربران الگوریتم های بهینه سازی تصور می کنند که این کاهش در تعداد تکرارها به معنی کاهش زمان اجرای برنامه برای رسیدن به همگرایی است، در حالی که چنین تصوری کاملاً غلط است. هرچند که افزایش تعداد ذراات اولیه کاهش تعداد تکرارها را در پی دارد. اما افزایش در تعداد ذرات باعث می گردد که الگوریتم در مرحله ارزیابی ذرات زمان بیشتری را صرف نماید که این افزایش در زمان ارزیابی باعث می شود که زمان اجرای الگوریتم تا رسیدن به همگرایی با وجود کاهش در تعداد تکرارها، کاهش نیابد. پس افزایش تعداد ذرات نمی تواند برای کاهش زمان اجرای الگوریتم مورد استفاده قرار گیرد. تصور غلط دیگری وجود دارد و آن این است که برای کاهش زمان اجرای الگوریتم می توان تعداد ذرات را کاهش داد. این تصور نیز وجود دراد و آن این است که برای کاهش زمان لازم برای ارزیابی ذرات می گردد، اما برای این که الگوریتم به جواب بهینه برسد. تعداد تکرارها افزایش می یابد.
ارزیابی تابع هدف (محاسبه برآزندگی یا هزینه تابع هزینه، از متغیر تصادفی X استفاده میشود و تابع هزینه به شکل {\displaystyle X=(X_{1},\ldots ,X_{n})}{\displaystyle X=(X_{1},\ldots ,X_{n})} بیان میشن ) ذرات
در این مرحله باید هر یک از ذرات را که نشان دهنده یک حل برای مسئله مورد بررسی است، ارزیابی کنیم. بسته به مسئله مورد بررسی روش ارزیابی متفاوته. مثلاً اگر امکان تعریف یک تابع ریاضی برای هدف وجود داشته باشه با جایگذاری پارامترهای ورودی (که از بردار موقعیت ذره استخراج شدن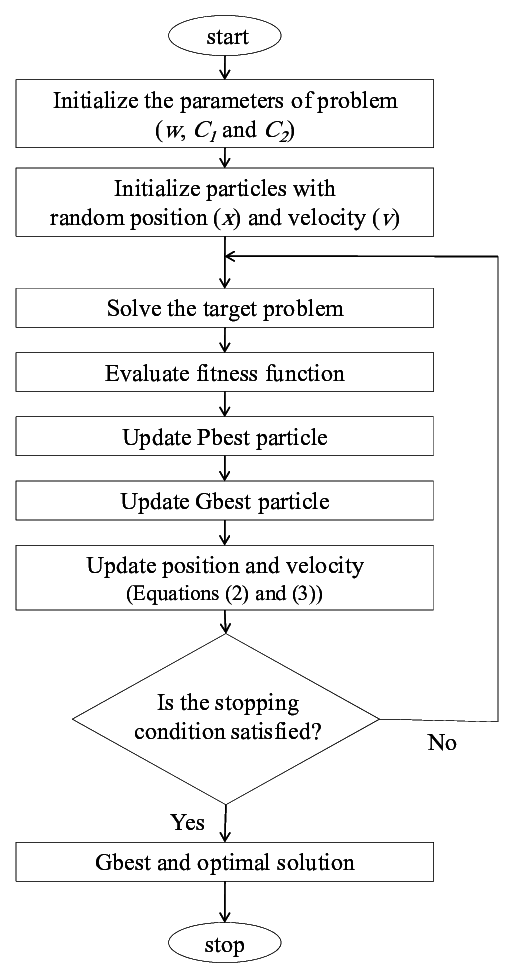
گاهی اوقات امکان تعریف یک تابع ریاضی برای ارزیابی ذرات وجود ندارد. این حالت زمانی پیش می آید که ما الگوریتم را با یک نرم افزار دیگر لینک کرده باشیم و یا الگوریتم را برای داده های تجربی (آزمایش) استفاده می کنیم. در این گونه موارد باید اطلاعات مربوط به پارامترهای ورودی نرم افزار یا آزمایش را از بردار موقعیت ذرات استخراج کرده و در اختیار نرم افزار لینک شده با الگوریتم جایگذاری کرد و یا درآزمایش مربوطه اعمال نمود. با اجرای نرم افزار و یا انجام آزمایش و مشاهده و اندازه گیری نتایج را که هر یک از ذرات در پی دارند مشخص خواهد شد.
ثبت بهترین موقعیت برای هر ذره (P_(i .best)) و بهترین موقعیت در بین کل ذره ها (P_(g .best))
در این مرحله با توجه بهCost function شماره تکرار، دو حالت قابل بررسی است:
اگر در تکرار اول باشیم (t=1). موقعیت فعلی وCost functionهر ذره را به عنوان بهترین محل یافت شده برای آن ذره در نظر می گیریم.
$X_i=(x_(i_1 ),x_(i_2 ),x_(i_3 ),…,x_(i_d ))$
یعنی:
${█(if cost(X_(i ) (t))<cost (P_(i ,best) )@else Not change)┤⟹{█(cost (P_(i ,best) )= cost (X_j (t))@P_(i ,best)= X_i (t) $)┤i=1,2,3,…,d
به روز رسانی بردار سرعت تمامی ذره ها
$V_i (t)=w*V_i (t-1)+ c_1*〖rand〗_1*(P_(i .best)- X_i (t-1) ) + c_2*〖rand〗_2*(P_(g .best)- X_i (t-1) )$
ضرایب w,c1, c2 با توجه به مسئله مورد نظر به روش تجربی تعیین می گردند. اما به عنوان یک قانون کلی در نظر داشته باشید که w باید کمتر از یک باشد زیرا اگر بزرگتر از یک انتخاب شود، V(t) دائماً افزایش می یابد تا جایی که واگرا گردد. همچنین توجه داشته باشید، هرچند در تئوری ضریب w می تواند منفی نیز باشد اما در استفاده عملی از این الگوریتم هیچ گاه این ضرایب را منفی در نظر نگیرید زیرا منفی بودن w موجب ایجاد نوسان در V(t)می شود. انتخاب مقدار کوچک برای این ضریب (w) نیز مشکلاتی را در پی خواهد داشت. اغلب در الگوریتم PSO مقدار این ضریب را مثبت و در رنج 0.7 تا 0.8 در نظر می گیرند. c2 و c3 نیز نباید زیاد بزرگ انتخاب شوند زیرا انتخاب مقادیر بزرگ برای این دو ضریب باعث انحراف شدید ذره از مسیر خودی می شود. اغلب در الگوریتم PSO مقدار این ضرایب را مثبت و در رنج 1.5 الی 1.7 در نظر می گیرند.
لازه به یادآوری است که الزاماً مقادیر پیشنهادی فوق تنها انتخاب های ممکن برای ضرایب w,c1, c2 نیست بلکه با توجه به مسئله مورد بررسی ممکن است انتخاب های بهتری غیر از موارد فوق وجود داشته باشد.
تست همگرایی
تست همگرایی در این الگوریتم مانند سایر الگوریتم های بهینه سازیه. برای بررسی الگوریتم روش های گوناگونی وجود داره. برای مثال می توان تعداد مشخصی تکرار را از همان ابتدا معلوم کرد و در هر مرحله بررسی کرد که آیا تعداد تکرارها به مقدار تعیین شده رسیده است؟ اگر تعداد تکرارها کوچکتر از مقدار تعیین شده اولیه باشد، آن گاه باید به مرحله 2 بازگردید در غیر این صورت الگوریتم پایان می پذیرد. روش دیگری که اغلب در تست همگرایی الگوریتم استفاده می شود، این است که اگر در چند تکرار متوالی مثلاً 15 یا 20 تکرار تغییری در مقدار بهترین ذره ایجاد نگردد آنگاه الگوریتم پایان میابه در غیر این صورت باید به مرحله 2 برین. دیاگرام گردشی (فلوچارت) الگوریتم PSO در شکل دادم
پاسخ های محتمل به مساله بهینه سازی را ذره میگن. بنابراین ذرات همان عامل جستجوهستند
گروه ذرات: به مجموعه ای ذرات (جواب های محتمل برای مساله بهینه سازی) گروه یا Swarm میگیم. تعداد ذرات در هر گروه swarm size هست
رهبر گروه پس از هر تکرار یک ذره در گروه دارای بهترین جوابه (best fitness). این ذره رهبر گروه در آن تکراره که سایر ذرات در تکرار بعدی سعی دارن به این مقدار نزدیک بشن. (Gbest)
موقعیت برتر هر ذره خود به تنهایی موقعیت فعلی خود را با موقعیت قبلی مقایسه می کند و بهترین حالت را در حافظه خود ذخیره می کنه. در تکرار های بعدی علاوه بر در نظر گرفتن موقعیت بر تر خود سعی در خیزش به سمت موقعیت رهبر گروه را نیز دارد. (Pbest)
standard pso
PSO در متلب
برای پیاده سازی PSO در نرم افزار متلب تابع particleswarm هست. این تابع در ورودی موارد زیر را از کاربر میخواد
اسم تابع
تعداد متغیر ها
بردار حداقل ذرات
بردار حداکثر ذرات
آپشن های کنترلی در اجرای الگوریتم
$[x,fval,exitflag,output] = particleswarm(fun,nvars,lb,ub,options)$
مقدار ذره بهینه
مقدار best function
عاملی که باعث توقف الگوریتم شده
خروجی عملکرد الگوریتم
$
2
3
4
5
fun = @(x)x(1)*exp(-norm(x)^2);
lb = [-10,-15];
ub = [15,20];
nvars = 2;
[x,fval,exitflag,output] = particleswarm(fun,nvars,lb,ub)
$
مشکل برنامه ریزی مسیر ABC + PSO در اینجا خوب سیستم سعی می کنه بهینه ترین مسیر را بین نقطه شروع و نقطه مقصد با کمک الگوریتم Artificial Bee Colony (ABC) و الگوریتم بهینه سازی ازدحام ذرات ترکیبی پیدا کنه. یک خط منحنی سعی میکنه بهترین مسیر را پیدا کنه. برنامه ریزی مسیر ABC+PSO
PSO(الگوریتم بهینه سازی ازدحام ذرات PSO) از دسته الگوریتم های بهینه سازی است که بر مبنای تولید تصادفی جمعیت اولیه عمل میکنه. هر عضو در این گروه توسط بردار سرعت و بردار موقعیت در فضای جستجو تعریف می گرده. در هر تکرار زمانی موقعیت جدید ذرات با توجه به برار سرعت و بردار موقعیت در فضای جستجو تعریف میشه. در هر تکرار زمانی، موقعیت جدید ذرات با توجه به بردار سرعت فعلی بهترین موقعیت یافت شده توسط آن ذره و بهترین موقعیت یافت شده توسط بهترین ذره موجود در گروه، به روز رسانی میشه. این الگوریتم برای پارامتر پیوسته و گسسته تعریف شده. خوب الگوریتم بهینه سازی ازدهام ذرات را در حالت گسسته با (BPSO) معرفی میشه. در این الگوریتم موقعیت هر ذره با مقدار یک تعریف می گردد. در این الگوریتم موقعیت هر ذره با مقدارباینری صفر و یا یک نشون میدیم . در BPSO مقدار هر ذره می تواند از صفر به یک و یا از یک به صفر تغییر کنه. سرعت هر ذره نیز به عنوان احتمال تغییر هر ذره به مقدار یک تعریف می گرده. یک روش بهینهسازی قوی برای حل مسئله طراحی مسیر وسیله نقلیه پرتاب ماهواره (SLV) در حضور عدم قطعیت با استفاده از یک الگوریتم قدرتمند بهینهسازی ازدحام ذرات (PSO) با توجه به عدم قطعیت هایی مانند عدم قطعیت در مقادیر واقعی ضرایب آیرودینامیکی، نیروی رانش موتور و جرم در مرحله صعود یک SLV، دستیابی به یک مسیر بهینه که در برابر این عدم قطعیت ها مقاوم باشه، مهم است. زیرا عملکرد پرواز را بهبود می بخشه و حجم کار سیستم هدایت-کنترل را کاهش میده و قابلیت اطمینان ماهواره را بالا میبره.
چگونه می توان عناصر مداری را با استفاده از بردارهای موقعیت/سرعت به صورت برنامه ای محاسبه کرد؟
به طور خاص، من می خواهم با محاسبه عناصر Keplarian شروع کنم. ورودی هایی که به برنامه می دهم بردار موقعیت و سرعت همراه با زمان خواهد بود. این بردارهای ورودی نسبت به مرکز زمین خواهند بود، بنابراین اگر بخواهم از یک مکان خاص روی سطح به عنوان نقطه مرجع استفاده کنم، ممکن است نیاز به انتقال مختصات داشته باشم.
.با توجه به بردارهای موقعیت و سرعت زمین محور، اینرسی (ECI) $\vec{r}$ و $\vec{v}$، می توانید مستقیماً عناصر مداری کلاسیک $(a,e,i,\Omega,\omega,\nu)$ را به صورت زیر حل کنید (ابتدا الگوریتم ها و سپس کد شبه در پایین):
ابتدا تکانه زاویه ای را حل کنید
$\vec{h}=\vec{r} \times \vec{v}$
سپس بردار گره
$\hat{n}=\hat{K} \times \vec{h}$
که بعدا مورد استفاده قرار خواهد گرفت.
بردار خروج از مرکز پس از آن است
$\vec{e} = \frac{(v^2-\mu /r)\vec{r}-(\vec{r} \cdot \vec{v})\vec{v}}{\mu}$
و$e=|\vec{e}|$
انرژی مکانیکی ویژه است
$E=\frac{v^2}{2}-\frac{\mu}{r}$
اگر e≠1، پس
$a = -\frac{\mu}{2E}$
$p=a(1-e^2)$
در غیر این صورت،
$p=\frac{h^2}{\mu}$
$a=\infty$
اکنون،
$i=\cos^{-1}{\frac{h_K}{h}}$
$\Omega=\cos^{-1}{\frac{n_I}{n}}$
$\omega=\cos^{-1}{\frac{\vec{n}\cdot\vec{e}}{ne}}$
$\nu=\cos^{-1}{\frac{\vec{e}\cdot\vec{r}}{er}}$
و باید بررسی های زیر را انجام دهید: اگر $n_J<0$، پس $\Omega=360^{\circ}-\Omega$
اگر $e_K<0$، پس $\omega=360^{\circ}-\omega$، و
اگر$\vec{r}\cdot\vec{v}<0$، آنگاه $\nu=360^{\circ}-\nu$
توجه داشته باشید که برای موارد خاص با مشکلاتی (تکینگی) مواجه خواهید شد به ویژه مدارهای دایره ای (e≈0) و مدارهای استوایی (i≈0). در این موارد شما معمولاً یک متغیر جدید و کم دردسر معرفی میکنید، مانند طول جغرافیایی متوسط یا طول جغرافیایی واقعی حضیض.
$h=cross(r,v)
nhat=cross([0 0 1],h)
evec = ((mag(v)^2-mu/mag(r))*r-dot(r,v)*v)/mu
e = mag(evec)
energy = mag(v)^2/2-mu/mag(r)
if abs(e-1.0)>eps
a = -mu/(2*energy)
p = a*(1-e^2)
else
p = mag(h)^2/mu
a = inf
i = acos(h(3)/mag(h))
Omega = acos(n(1)/mag(n))
if n(2)<0
Omega = 360-Omega
argp = acos(dot(n,evec)/(mag(n)*e))
if e(3)<0
argp = 360-argp
nu = acos(dot(evec,r)/(e*mag(r))
if dot(r,v)<0
nu = 360 - nu$
تعاریف اولیه الگوریم PSO
فرض کنید یک فضای جستجوی d بعدی داریم. i اُمین ذره در این فضای d بعدی باب بردار موقعیت Xi اینطور توصیف میکنم
$X_i=(x_(i_1 ),x_(i_2 ),x_(i_3 ),…,x_(i_d ))$
بردار سرعت i اُمین ذره نیز با بردار Vi به شکل زیر تعریف می گردد:
$V_i=(v_(i_1 ),v_(i_2 ),v_(i_3 ),…,v_(i_d ))$
بهترین موقعیتی که ذره i اُم پیدا کرده است را با Pi .best تعریف می کنیم:
$P_(i .best)=(p_(i_1 ),p_(i_2 ),p_(i_3 ),…,p_(i_d )) $
بهترین موقعیتی که بهترین ذره در بین کل ذرات پیدا کرده است را با Pg .best به صورت زیر تعریف می کنیم:
$P_(g .best)=(p_(g_1 ),p_(g_2 ),p_(g_3 ),…,p_(g_d ))$
برای به روز رسانی محل هر کدام از ذرات از رابطه زیر استفاده می کنیم:
$V_i (t)=w*V_i (t-1)+ c_1*〖rand〗_1*(P_(i .best)- X_i (t-1) ) + c_2*〖rand〗_2*(P_(g .best)- X_i (t-1) )$
$X_i= X_i (t-1)+ V_i (t)$
W : ضریب وزنی اینرسی (حرکت در مسیر خودی) که نشان دهنده میزان تأثیر بردار سرعت تکرار قبل 〖(V〗_i (t)) بر روی بردار سرعت در تکرار فعلی 〖(V〗_i (t+1)) است.
c_1 : ضریب ثابت آموزش (حرکت در مسیر بهترین مقدار ذره مورد بررسی)
c_2 : ضریب ثابت آموزش (حرکت در مسیر بهترین ذره یافت شده در بین کل جمعیت)
〖rand〗_1,〖rand〗_2: دو عدد تصادفی با توزیع یکنواخت در بازه 0 تا 1
V_i (t-1) بردار سرعت در تکرار (t-1) ام
X_i (t-1) بردار موقعیت در تکرار (t-1) ام
برای جلوگیری از افزایش بیش از حد سرعت حرکت یک ذره در حرکت از یک محل به محل دیگر (واگرا شدن بردار سرعت)، تغییرات سرعت را به رنج V_max تا V_min محدود می کنیم؛ یعنی V_min≤V ≤ V_max. حد بالا و پایین سرعت با توجه به نوع مسئله تعیین می گردد.
محدود سازی فضا
بعضی از مسائل دامنه تعریفی خاصی برای پارامترهای خود دارند و تنها در این دامنه دارای مقداری محدود، منطقی و تعریف شده هستند. به عبارت دیگر اگر در مسئله مورد بررسی قید و یا قیودی وجود داشته باشد، باید توسط مکانیزمی این قیود لحاظ گردند تا از ورود ذرات به فضای غیر مجاز جلوگیری شود. این مکانیزم را اصطلاحاً محدودسازی فضا می نامند. اگر از این مکانیزم ها استفاده نشود، پاسخ پیدا شه توسط الگوریتم اشتباه و یا غیر قابل اطمینان است. مثلاً تابع زیر برای مقادیر منفی x در اکثر زبان های برنامه نویسی، خطا محسوب می شود.
$f(x)= ∑_(d=1)^D▒〖√x 〗$
مکانیزمی که برای لحاظ کردن این قید استفاده می شود، بصورت زیر است:
$x=max(0,x)$
در تابع فوق مقادیر مجاز x؛ یعنی x≥0 بدون هیچ گونه تغییری نگاشت میشن اما مقادیر غیر مجاز x؛ یعنی x<0 به مقدار مجاز x=0 نگاشت می شوند. در حالت کلی تر اگر بخواهیم محل ذرات بصورت$ 〖[α_min ,α_max]〗^D$ باشد، برای محدودسازی می توان از رابطه زیر استفاده کرد:
$α_d=min〖 {max〖 (〗 〗 X_d ,V_d ,α_min),α_max}$
با استفاده از رابطه فوق محل ذراتی که در خارج از محدوده تعریف شده قرار داشته باشند به داخل محدوده مجاز نگاشت می شوند و محل سایر ذراتی که در محدوده مجاز قرار دارند تغییری داده نمی شود.
مراحل اجرای الگوریتم PSO
بعضاً در مراجع مختلف در نحوه تفکیک مراحل اجرای الگوریتم اختلافاتی دیده میشه یعنی در یک مواقع مراحل بصورت تفکیک شده تری ذکر می شوند و در برخی مواقع دو یا تعداد بیشتری از مراحل را با هم ترکیب کرده و تبدیل به یک مرحله می کنند. اما این موضوع اشکالی در برنامه نویسی های انجام شده ایجاد نمی کند زیرا آنچه که مهم است اجرا شدن مراحل برنامه به ترتیبی که در ادامه خواهد آمد، است و نحوه تفکیک این مراحل. مثلاً در برخی مراجع مرحله 4 و 5 را با هم ترکیب می کنند؛ یعنی مرحله به روز رسانی سرعت ذرات و انتقال ذرات به محل های جدید را به عنوان یک مرحله در نظر می گیرند. این تغییر اشکالی در روند اجرای الگوریتم ایجاد نخواهد کرد.
مرحله 1، تصادفی جمعیت اولیه ذرات
تولید تصادفی جمعیت اولیه بطور ساده عبارت است از تعیین تصادفی محل اولیه ذرات با توزیع یکنواخت در فضای حل (فضای جستجو). مرحله تولید تصادفی جمعیت اولیه تقریباً در تمامی الگوریتم های بهینه سازی احتمالاتی وجود دارد. اما در این الگوریتم علاوه بر محل تصادفی اولیه ذرات، مقداری برای سرعت اولیه ذرات نیز اختصاص می یابد. رنج پیشنهادی اولیه برای سرعت ذرات را می توان از رابطه زیر استخراج کرد.
(X_min- X_max)/2 ≤V ≤ (X_max- X_min)/2
انتخاب تعداد ذرات اولیه
می دانیم که افزایش تعداد ذرات اولیه موجب کاهش تعداد تکرارهای لازم برای همگرا شدن الگوریتم می گردد. اما گاهی مشاهده می شود که کاربران الگوریتم های بهینه سازی تصور می کنند که این کاهش در تعداد تکرارها به معنی کاهش زمان اجرای برنامه برای رسیدن به همگرایی است، در حالی که چنین تصوری کاملاً غلط است. هرچند که افزایش تعداد ذراات اولیه کاهش تعداد تکرارها را در پی دارد. اما افزایش در تعداد ذرات باعث می گردد که الگوریتم در مرحله ارزیابی ذرات زمان بیشتری را صرف نماید که این افزایش در زمان ارزیابی باعث می شود که زمان اجرای الگوریتم تا رسیدن به همگرایی با وجود کاهش در تعداد تکرارها، کاهش نیابد. پس افزایش تعداد ذرات نمی تواند برای کاهش زمان اجرای الگوریتم مورد استفاده قرار گیرد. تصور غلط دیگری وجود دارد و آن این است که برای کاهش زمان اجرای الگوریتم می توان تعداد ذرات را کاهش داد. این تصور نیز وجود دراد و آن این است که برای کاهش زمان لازم برای ارزیابی ذرات می گردد، اما برای این که الگوریتم به جواب بهینه برسد. تعداد تکرارها افزایش می یابد.
ارزیابی تابع هدف (محاسبه برآزندگی یا هزینه تابع هزینه، از متغیر تصادفی X استفاده میشود و تابع هزینه به شکل {\displaystyle X=(X_{1},\ldots ,X_{n})}{\displaystyle X=(X_{1},\ldots ,X_{n})} بیان میشن ) ذرات
در این مرحله باید هر یک از ذرات را که نشان دهنده یک حل برای مسئله مورد بررسی است، ارزیابی کنیم. بسته به مسئله مورد بررسی روش ارزیابی متفاوته. مثلاً اگر امکان تعریف یک تابع ریاضی برای هدف وجود داشته باشه با جایگذاری پارامترهای ورودی (که از بردار موقعیت ذره استخراج شدن
گاهی اوقات امکان تعریف یک تابع ریاضی برای ارزیابی ذرات وجود ندارد. این حالت زمانی پیش می آید که ما الگوریتم را با یک نرم افزار دیگر لینک کرده باشیم و یا الگوریتم را برای داده های تجربی (آزمایش) استفاده می کنیم. در این گونه موارد باید اطلاعات مربوط به پارامترهای ورودی نرم افزار یا آزمایش را از بردار موقعیت ذرات استخراج کرده و در اختیار نرم افزار لینک شده با الگوریتم جایگذاری کرد و یا درآزمایش مربوطه اعمال نمود. با اجرای نرم افزار و یا انجام آزمایش و مشاهده و اندازه گیری نتایج را که هر یک از ذرات در پی دارند مشخص خواهد شد.
ثبت بهترین موقعیت برای هر ذره (P_(i .best)) و بهترین موقعیت در بین کل ذره ها (P_(g .best))
در این مرحله با توجه بهCost function شماره تکرار، دو حالت قابل بررسی است:
اگر در تکرار اول باشیم (t=1). موقعیت فعلی وCost functionهر ذره را به عنوان بهترین محل یافت شده برای آن ذره در نظر می گیریم.
$X_i=(x_(i_1 ),x_(i_2 ),x_(i_3 ),…,x_(i_d ))$
یعنی:
${█(if cost(X_(i ) (t))<cost (P_(i ,best) )@else Not change)┤⟹{█(cost (P_(i ,best) )= cost (X_j (t))@P_(i ,best)= X_i (t) $)┤i=1,2,3,…,d
به روز رسانی بردار سرعت تمامی ذره ها
$V_i (t)=w*V_i (t-1)+ c_1*〖rand〗_1*(P_(i .best)- X_i (t-1) ) + c_2*〖rand〗_2*(P_(g .best)- X_i (t-1) )$
ضرایب w,c1, c2 با توجه به مسئله مورد نظر به روش تجربی تعیین می گردند. اما به عنوان یک قانون کلی در نظر داشته باشید که w باید کمتر از یک باشد زیرا اگر بزرگتر از یک انتخاب شود، V(t) دائماً افزایش می یابد تا جایی که واگرا گردد. همچنین توجه داشته باشید، هرچند در تئوری ضریب w می تواند منفی نیز باشد اما در استفاده عملی از این الگوریتم هیچ گاه این ضرایب را منفی در نظر نگیرید زیرا منفی بودن w موجب ایجاد نوسان در V(t)می شود. انتخاب مقدار کوچک برای این ضریب (w) نیز مشکلاتی را در پی خواهد داشت. اغلب در الگوریتم PSO مقدار این ضریب را مثبت و در رنج 0.7 تا 0.8 در نظر می گیرند. c2 و c3 نیز نباید زیاد بزرگ انتخاب شوند زیرا انتخاب مقادیر بزرگ برای این دو ضریب باعث انحراف شدید ذره از مسیر خودی می شود. اغلب در الگوریتم PSO مقدار این ضرایب را مثبت و در رنج 1.5 الی 1.7 در نظر می گیرند.
لازه به یادآوری است که الزاماً مقادیر پیشنهادی فوق تنها انتخاب های ممکن برای ضرایب w,c1, c2 نیست بلکه با توجه به مسئله مورد بررسی ممکن است انتخاب های بهتری غیر از موارد فوق وجود داشته باشد.
تست همگرایی
تست همگرایی در این الگوریتم مانند سایر الگوریتم های بهینه سازیه. برای بررسی الگوریتم روش های گوناگونی وجود داره. برای مثال می توان تعداد مشخصی تکرار را از همان ابتدا معلوم کرد و در هر مرحله بررسی کرد که آیا تعداد تکرارها به مقدار تعیین شده رسیده است؟ اگر تعداد تکرارها کوچکتر از مقدار تعیین شده اولیه باشد، آن گاه باید به مرحله 2 بازگردید در غیر این صورت الگوریتم پایان می پذیرد. روش دیگری که اغلب در تست همگرایی الگوریتم استفاده می شود، این است که اگر در چند تکرار متوالی مثلاً 15 یا 20 تکرار تغییری در مقدار بهترین ذره ایجاد نگردد آنگاه الگوریتم پایان میابه در غیر این صورت باید به مرحله 2 برین. دیاگرام گردشی (فلوچارت) الگوریتم PSO در شکل دادم
-
rohamavation
نام: roham hesami radرهام حسامی راد
محل اقامت: 100 مایلی شمال لندن جاده آیلستون، لستر، لسترشر. LE2
عضویت : سهشنبه ۱۳۹۹/۸/۲۰ - ۰۸:۳۴
پست: 3286-
سپاس: 5494
- جنسیت:
تماس:
Re: هوافضا
. خوب همین هوافضا شامل محاسبه حرکت هواپیما وهم در مورد فضانوردی، مکانیک سماوی
علم احتراق، رفتار سیالات، مباحث ترمودینامیک استاتیک و ارتعاشات و علم مواد.و مقاومت مواد و دینامیک اجسام سازه ها و کنترل مکانیکی و دینامیک پرواز طراحی وما در درسها و لابوراتور با cfd سرکار داریم Computational Fluid Dynamics خوب طبیعتا با نرم افزارهای زیادی سر کار داریم همون ترم های اول درس آلگوریتم ها و برنامه سازي کامپیوتر ممعمولاً زبان برنامه نویسی فرترن (Fortran) درس میدن خوب


البته ++C (سی پلاس پلاس) و– #C (سی شارپ) هست تسلط بر برنامههایی مانند متلب (matlab) انسیس فلوئنت، CFX، آباکوس و کامسول برای حل معادلاتی مانند معادلات ناویر استوکس (Navier-Stokes Equations)برای پیش بینی درگ، لیفت وبارهای ساختاری و حرارتی، احتراق و غیره، عملکرد در سیستم ها و زیرسیستم های هواپیما استفاده میشه. خوب بعضی قویترن بعضی ضعیفتر من خودم با برنامه میتونم کار کنم اما برنامه نویسیم ضعیفه .حتی لپ تاپم مشکلی نرم افزاری داره میدم بچه ها برام سرویس کنن من تو درس مبانی مدار هم چندان قوی نبودم و تو ازمایشگاه هم حتی یک هویه ساده بلد نیستم لحیم کنم تو تحلیل تئوری خوبم تو لابوراتور نه المان های الکتریکی پایه، قوانین تحلیل مدارات الکتریکی، مدارات مرتبه اول و دوم، مدارات AC و مدارات تزویج و ترانسفورماتور .(Transformator)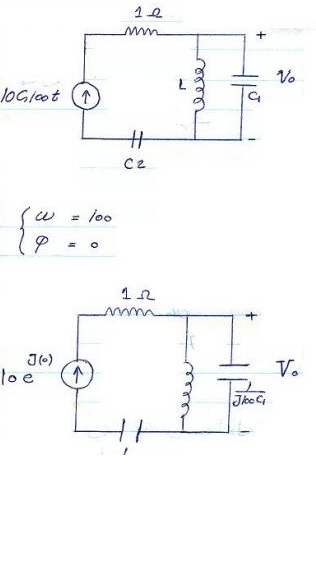 و
و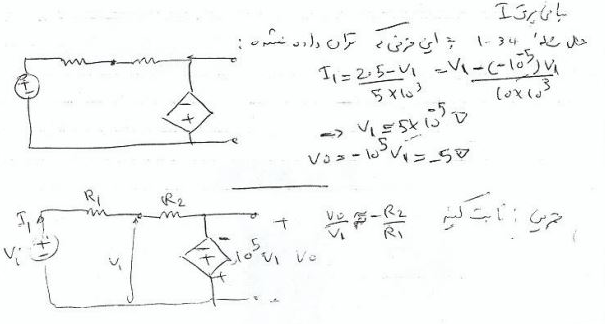
بماند تحلیم خوبه تو از ضعیفترم . _(چون از برق زیاد خوشم نمیاد ) پس تو اویونیک ضعیفم ولی بازکا ربا استندهای لابوراتور مثل ژیروسکوپهای میکرومکانیکی - حرکت فرفرهای ژیروسکوپ و- ژیروسکوپ فوکو و- آونگ فوکو -فیکسر سیمپیچ بوبین - استند یک محوره اندازهگیری تراست تراستر -- استند بالزن ۶ درجه آزادی -- استند پاندول معکوس دو درجه آزادی غیرخطی-- منبع تغذیه-- اسیلوسکوپ
- دستگاه دادهبرداری-- درایور اکچوتیورها خوبم میتونم کار کنم تو کنترل مکانیکی-قواعد رسم مكان هندسي ريشه ها -تحليل سيستمهاي كنترلي توسط روش مكان هندسي ريشه ها- طراحي سيستمهاي كنترلي توسط روش مكان هندسي ريشه ها . با هدف های شبیهسازی سیستمهای دینامیکی هوافضایی خطی و غیرخطی و- شناسایی سیستمهای دینامیکی هوافضایی خطی و غیرخطی و- طراحی سیستمهای دینامیکی هوافضایی خطی و غیرخطی و بهینهسازی در واقعا تحلیل ریاضی کنترل کننده های مثل نیوماتیک بحاله نحوه مدلسازی سیستم های مختلف مکانیکی و الکتریکی و الکترومکانیکی و رفتار دینامیکی آنها هم در حوزه زمان و هم درحوزه فرکانس آنها خوب شامل تبديل لاپلاس نمايش و مدلسازي رياضي سيستم هاي مكانيكي رفتار سيستم هاي ديناميكي و.. میشه منم تو این حوزه خوبم در واقع آیرودینامیک هسته اصلی تمام برنامه های مهندسی هوافضاست.دستگاه هدایت حرارتی جامدات

چرخدندههای خورشیدی









ارتعاشات اجباری تیرها به همراه جاذب ارتعاشات


دستگاه بادامک و پیرو

شتاب ژیرسکوپی، نیروی گریز از مرکز و گاورنر
اونچه انجام میدیم اندازهگیری فشارهای استاتیک و سکون با لوله پیتوت
دوم مشاهده جریان در اطراف بالوایه دو بعدیبرای برسی اثر زاویه حمله و سرعت
- توزیع فشار بر روی یک استوانه در سرعتهای مختلف و تشخیص نقطه جدائی
اثر زبری بر روی ضریب درگ کره و استوانه
- اندازه گیری بارهای آئرودینامیکی یک ماکاپ هواپیما در سرعت زیر صوت برای تعیین زاویه حمله، زاویه جانبی و زاویه غلت و پایداری
- بررسی اثر زاویه فلپ بر روی توزیع فشار بالوایه
- بررسی لایه مرزی روی یک صفحه مسطح
- بررسی اثر رینولدز بر روی لایه مرزی
- اندازه گیری توزیع فشار به دور یک بالوایه برای محاسبه ضرائب آئرودینامیکی شبیه سازی
- کالیبره سیم داغ برای اندازه گیری سرعت و شدت توربولانس
- بررسی اشکال مختلف فلپ برای استال استاتیکی و افزایش لیفت با شبیه سازی
عملکرد نازل در فشارهای مختلف و بررسی شرایط خفگی با شبیه سازی
- بررسی توزیع فشار در طول نازل و مقایسه با مقادیر تئوری شبیه سازی
- بررسی توزیع فشار در حول نازل همگرا – واگرا شبیه سازی
- توزیع فشار در طول یک لوله با نظر ثابت برای شناسائی اثرات گرمادهی حرارت ، سرعت ، دما و ...
ترنسدیوسر فشار، لوله پیتوت، تراورس سیستم و رک فشارودستگاه هات وایر
بعدش تو کارگاه هواپیما هنده دورسنج
نشان دهنده فشار سوخت
نشان دهنده نرخ مصرف سوخت
نشان دهنده فشار روغن
انواع حرارت سنج
نشان دهنده مانیفولد
کارگاه موتور هم
ماکاپ لندینگیر و اسکرپ جند مدل موتور پیستونی
تو احتراق میز آزمایش احتراق میکرو و مزو، دستگاه آزمایش محفظه احتراق در شرایط اتمسفریک، دستگاه آزمایش محفظه چرخش دو گانه، دستگاه آزمایش بررسی اثر چرخش، دستگاه آزمایش شعله دیفیوژن، دستگاه آزمایش شعله MILD، دستگاه آزمایش بررسی جرقه و aouto ignition، دستگاه آزمایش counter-flow . در این آزمایشگاه همچنین کارهای شبیه سازی محفظه احتراق به روش CFD با نرم افزارهای Fluent ، OpenFoam و CFXانجام میدیم. تو مقاومت مصالح دستگاه Data logger استاتیکی - داده برداری-
دستگاه Data logger دینامیکی - فیکسچر تست برش تست های استاتیکی جهت تعیین چقرمگی شکست-پلاریسکوپ
تو ترمودینامیک هم سيكل تبريد تراكمي ـ ديگ مارست ـ سيكل استرلينگ ـ بمب كالريمتر ـ دستگاه تست موتور بنزيني ( سيكل اتو ) - دستگاه تست موتور دیزل (سیکل دیزل) ـ تست كمپرسور ـ تست نازلها -ازمایش ماشین بخار-آزمایش کمپرسور یک مرحلهای-آزمایش کمپرسور چند مرحلهای-آزمایش سیکل تبرید تراکمی-آزمایش سیکل تبرید جذبی آزمایش تهویه مطبوع
 اینم تست کمپرسوره
اینم تست کمپرسوره
خوب یک مهندس فضایی با اجسام موجود در فضا سر و کار داره: از ماهواره ها، ایستگاه های فضایی، وسایل نقلیه فضایی و کاوشگرهای فضایی گرفته تا زباله های فضایی. فضا به معنای ارتعاشات پرتاب وخلاء، نگرانی های تشعشعات، شیب ها و temperature tolerance of objects ، مسیرهای پیچیده، بدون تعمیر و نگهداری شما هواپیما یا وسیله زیر جوی نیست بشه تعمیرش کرد باید طوری بسازی که امکان خطا تقریبا صفر شود .برای همین صدها بار تست میشه . تشعشع حرارتیب رای (تعیین ضریب صدور) و آزمایش جابجایی آزاد استفاده میشه
تشعشع حرارتیب رای (تعیین ضریب صدور) و آزمایش جابجایی آزاد استفاده میشه
مهندس هوانوردی با اشیاء موجود در هوا سر و کار داره اما نه در فضا عموما همه انواع هواپیماها و هلیکوپترها، اما بالون ها و موشک ها نیز در این کلاس هستند. منم موندم ولی فضا را انتخاب با گرایش پیشران .این رشته جذاب و فوق العاده ای هست. البته من به همین خاطر انتخابش کردم .حال جدا از بازار کار و اینها من صرفا جهت علاقه میگم چون میتونی کارهای طراحی، مدلسازی، آزمایش ها، ارزیابی و ساخت تولید را انجام بدید و همچنین به روز بودن و آگاهی از جدید ترین پیشرفت هاوتوانایی خوب در تحلیل مسایل و همچنین نظارت و هماهنگی در ساخت، مونتاژ، اصلاح، تعمیر و بررسی هواپیماها و فضاپیماها برای من جنبه غیر نظامی اون مهم هست هر کس بسته به علاقه به گرایش خاصی میتونه انتخاب کنه .اساسادرسهای اصلی اون بر پایه علم آیرودینامیک.- علم پیشرانش.- الکترونیک پرواز.
علم مواد.- آنالیز سازه ها.- مکانیک.- متالوژی. هستش.این رشته با طراحی هواپیما، فضاپیما، ماهواره، ماهواره برها و همچنین طراحی و ساخت هلیکوپتر، هواپیمای بدون سرنشین، بدون موتور، عمود پرواز و یا جنگنده و ساخت پایگاه های فضایی وخوب برسی سوانح هوایی وفضایی Aviation accidents and incidentsو البته مهارت تو نرم افزار های زیر
Catia: نرمافزار طراحی قطعات
Ansys: نرمافزاری برای تحلیل مهندسی قطعات در تحلیلهای دینامیکی
Fluent : نرمافزار مدل کردن جریان سیال و انتقال حرارت در هندسههای پیچیده
ABAQUS : نرم افزاری برای تحلیل های المان محدود
XFLR5 : نرمافزاری مفید برای آغاز یادگیری هوافضا
Unigraphics : نرم افزار مدل سازی و طراحی قطعات
Matlab : نرمافزاری برای نوشتن برنامه و محاسبات ریاضی در مهندسی
همون طور كه مي دونيد، رشته هوافضا اشتراك زيادي با رشته مكانيك داره خوب اکثر درسهای من با اونها مشترک هست در زير ليست دروس هوافضا رو كه يه دانشجوي هوافضايي از ترم اول ميخونه به ترتيب براتون گذاشتم.در كنار هر درس من كتابي كه در رشته هوافضاکه معرفی میکنند قرار دادم. در واقع ما بچه های هوافضایی همين كتاب ها رو ميخونيم البته به نظر استادها کمی فرق داره
رياضي عمومي 1 و 2 -عبدالله شيدفر-
فيزيك عمومي 1 و 2 – هاليدي-بنسون
مقدمه ای بر هوافضا هیوبرت اسمیت، عبدالعلی حقیری (مترجم)
استاتيك – مريام
مقاومت مصالح – جانستون-
ديناميك–مريام )تشریح کامل مسایل دینامیک مریام و کرایگ
دارای هفت فصل مختلف می باشد مه برای درک و فهم بیشتر و ساده تر دانشجویان مربوطه ، به دو قسمت مجزا تقسیم شده اند.
بخش اول : دینامیک ذرات شامل چهار فصل با عنوان های
فصل اول : آشنایی با دینامیک
فصل دوم : سینماتیک ذرات
فصل سوم : سینتیک ذرات
فصل چهارم : سینتیک مجموعه ی ذرات
بخش دوم : دینامیک اجسام صلب شامل سه فصل با عنوان های
فصل پنجم : سینماتیک اجسام صلب در صفحه
فصل ششم : سینتیک اجسام صلب در صفحه
فصل هفتم : مقدمه ای بر دینامیک سه بعدی اجسام صلب
معادلات ديفرانسيل – عبدالله شيدفر –سیمونز
رياضيات مهندسي- چرچيل- يا شيدفر
ارتعاشات – تامسون
ترموديناميك مهندسي- ون وايلن – سنجل
مكانيك سيالات -فاكس – وايت
تحليل سازه – بديعي
انتقال حرارت –-فرانك اينكروپرا
طراحي سازه- براون – مگسون
طراحي اجزا 1 و2– شيگلي
آيروديناميك 1 و 2 – اندرسون
مكانيك پرواز1 و 2-دكتر هاشم صدرايي – نلسون – مک لین
اصول جلوبرنده ها – هیل پترسون – فلک-هنری کوهن
طراحي هواپيما 1 و 2 – دكتر هاشم صدرايي – راسكم – تورنبیک – ریمر
خوب یکسری دروس پایه داریم معادلات دیفرانسیل
ریاضی عمومی ۱ و ۲
برنامه نویسی کامپیوتر
محاسبات عددی
فیزیک ۱ و ۲ هریس بنسون-هالیدی
آزمایشگاه فیزیک ۱
استاتیک مریام
علم مواد وحید ایوبی
ریاضیات مهندسی اروین کریزیگ-دکتر بنی فاطمی-چرچيل- يا شيدفر
و تخصصی
نقشه کشی صنعتی
مقاومت مصالح و آزمایشگاه--بیر جانسون
دینامیک عمومی
مکانیک سیالات
ترمودینامیک ۱و ۲
ارتعاشات مکانیکی
دینامیک پرواز--Roskam
کنترل اتوماتیک-بنجامین کو
تحلیل سازه های هوایی
آزمایشگاه مکانیک
انتقال حرارت ۱ فرانك اينكروپرا
آیرودینامیک ۱ و آزمایشگاه
آیرودینامیک ۲ و آزمایشگاه
طراحی به کمک رایانه
طراحی اجزای ماشین ۱ شیگلی
کارگاه ورق کاری
مکانیک پرواز
مبانی مهندسی برق و آزمایشگاه
مقدمه ای بر مهندسی هوافضا
کارگاه موتورهای هواپیما
زبان تخصصی
طراحی هواپیما ۱ و ۲ جان راسکم
اصول جلو برنده ها کوهن (Cohen
طراحی سازه های هوایی مگسون
مکانیک مدارهای فضایی تالیف: هاوارد دی. کرتیس
یکسری انتخابی داریم
آمار و احتمالات مهندسی دکتر نادر نعمت الهی
روشهای تجربی در آیرودینامیک Stefano Discetti
سوخت و احتراق ابراهیم افشاری مرتضی نیکخواه قمصری یاسر ملایی برزی
آیرودینامیک هلی کوپتر
تئوری آیرودینامیک ملخ
مقدمه ای بر مکانیک سیالات عددی
آشنایی با هواپیماها و سلاح های هوایی
آشنایی با سامانه های ارتباط هوایی و جنگال
دستورالعمل های فنی
سامانه مدیریت ایمنی
موتورهای احتراق داخلی بنجامین هیوود-چارلز فایت تیلر
اصول راکت ها جرج ساتون
توربین های گازی مهدی ملک پور
توربو ماشین ها مکانیک سیالات و ترمودینامیک توربوماشینها تالیف دیکسون (Dixon)
طراحی، کنترل و کاربرد سیستم های ماهواره ای
پروژه و یکسری دروس عمومی داریم ندیشه اسلامی 1و2
ادبیات فارسی
اخلاق و تربیت اسلامی
زبان عمومی خلیلی
انقلاب اسلامی و ریشه های آن
تربیت بدنی 1
تاریخ تحلیلی صدر اسلام
تربیت بدنی 2
تفسیر موضوعی قرآن
فرهنگ و تمدن اسلامی
البته شما تو 8 ترم کارشناسی و بعد گرایش انتخاب میکنید من خودم پیشران انتخاب میکنم
آیرودینامیک
این گرایش از مهمترین پایههای هوافضا بهشمار میرود. علم آیرودینامیک به مطالعه و بررسی جریان هوا و محاسبه نیروها و گشتاورهای ناشی از آن بر روی جسم پرنده، میپردازد. مهندسین هوافضا در این گرایش جریانهای پیچیده در اطراف جسم پرنده را تحلیل میکنند و با بدست آوردن نیروهای آیرودینامیکی به بررسی پایداری و طراحی سازه شناور در سیال میپردازند. به جز تحلیل، همواره یکی از اصلیترین دغدغههای مهندسین آیرودینامیک، طراحی بالها و بدنههایی با بیشترین کاربرد و کمترین هزینه است.
پیشرانش
دانش پیشرانهها به مطالعه و بررسی سامانههای جلوبرنده (موتور)، اعم از موتورهای هوازی و غیرهوازی میپردازد. موتورهای هوازی شامل موتورهای پیستونی و چرخپرهای (توربینی) است که از هوا بهعنوان اکسیدکننده استفاده نموده و سوخت را با خود حمل میکنند. اما موتورهای غیرهوازی مانند موتور موشکها و فضاپیماها است که سوخت و اکسیدکننده را با خود حمل میکنند. در این دانش نحوه تولید نیروی رانش و همچنین ساختار کلی انواع موتورهای هوافضایی بررسی و مورد تجزیه و تحلیل قرار میگیرد. طراحی و تعیین میزان عملکرد انواع سامانههای جلوبرنده نیز بسیار مورد توجه مهندسین پیشرانش هستند. این گرایش بسیار شبیه به مکانیک - تبدیل انرژی و سیستمهای انرژی میباشد مورد علاقه من این گرایش هست
دینامیک پرواز و کنترل
هدف کلی در گرایش دینامیک پرواز و کنترل بررسی حرکت وسایل پروازی و تعیین موقعیت و وضعیت آنها در هوا/فضا و در نهایت هدایت و کنترل مطلوب آنها می¬باشد. بدون داشتن چنین توانمندیهایی استفاده از موتورهای پر قدرت، آیرودینامیک مناسب و سازه های مستحکم محکوم به شکست است. علاوه بر این طراحی انواع وسایل پروازی از قبیال انواع هواپیماهای با و بدون سرنشین، بالگردها و ... در حوزه کاری متخصصین این رشته قرار دارد.
شبیه سازی پرواز وسایل پروازی از قبیل هواپیما، ماهواره و ...
ناوبری وسایل پروازی
متخصص ابزار و آلات دقیق هواپیما
متخصص کنترل وسایل پروازی
متخصص هدایت و طراحی مسیر بهینه وسایل پروازی
متخصص طراحی انواع وسایل پرنده نظیر هواپیما، پهپاد، ماهواره بر و ...
سازههای هوافضایی
طراحی سازه های مناسب برای حفظ وسیله پرنده در شرایط مختلف میباشد. منظور از سازه مناسب ، سازه ایست که نه تنها استحکام کافی دارد بلکه شرایط صلبیت، ارتعاشات ، خستگی و ..
متخصص طراحی سازه اجزا هواپیما نظیر بال ، دوم و بدنه
متخصص طراحی سازه موشک و ماهواره و ...
متخصص در تحلیل انواع سازه های انعطاف پذیر ، کامپوزیتی و هوشمند
گرایش مهندسی فضا یکی از گرایش های در مقطع کارشناسی ارشد رشته هوافضا است که به مباحث سامانه های فضایی از جمله ماهواره برها و سیستم های درونی آن می پردازد. این گرایش که از گرایش مکانیک پرواز جدا شده شباهت زیادی از لحاظ کاربردی به گرایش مکانیک پرواز دارد.. نرم افزارهای شبیه سازی در این بخش ترکیبی از نرم افزارهای محاسباتی و نرم افزارهای گرایش مکانیک پرواز است.
خوب تو ترم اول جدول ارائه ترمی دروس رشته هوافضا
نیمسال اول
1ریاضی عمومی1پایه-
2فیزیک1--هم نیازش----ریاضی عمومی1
3فارسی عمومی
4زبان عمومی
5آلگوریتمهاوبرنامه سازي کامپیوتر
6مقدمه اي برمهندسی هوافضا
7نقشه کشی صنعتی
نیمسال دوم
1ریاضی عمومی 2پیش نیاز ریاضی عمومی1-
2فیزیک2 پایه فیزیک1-
3معادلات دیفرانسیل پیش نیاز - -ریاضی عمومی2
4استاتیک ریاضی عمومی1 وفیزیک1
5آزمایشگاه فیزیک1 پیش نیاز فیزیک1-
6اندیشه اسلامی1
7اخلاق اسلامی یا آیین زندگی
8تربیت بدنی1
ترم سوم شما
1دینامیک پیش نیاز استاتیک
2مقاومت مصالح پیش نیاز استاتیک
3مکانیک سیالات پیش نیاز معادلات دیفرانسیل هم نیاز دینامیک
4ریاضی مهندسی پیش نیاز معادلات دیفرانسیل
5ترمودینامیک1 پیش نیاز معادلات دیفرانسیل و فیزیک 1
6اندیشه اسلامی 2
ترم چهارم شما
مبانی مهندسی برق و الکترونیک پیش نیاز فیزیک 2
2ترمودینامیک2 با پیش نیاز ترمودینامیک 1
3آیرودینامیک با پیش نیاز مکانیک سیالات
4تحلیل سازه ها با پیش الگوریتم و برنامه نویسی و مقاومت مصالح
5 علم مواد با پیش مقاومت مصالح
6 ارتعاشات مکانیکی با پیش دینامیک و ریاضی مهندسی
7 ازمایشگاه مقاومت مصالح پیش نیاز مقاومت مصالح
8-طراحی اجزاء ماشین پیش دینامیک
ترم پنجم
کنترل مکانیکی با هم نیاز ارتعاشات مکانیکی
انتقال حرارت با پیش نیاز ترمودینامیک 1
ازمایشگاه مکانیک سیالات پیش نیاز مکانیک سیالات
ایرودینامیک2 با پیش ایرودینامیک 1
مکانیک پرواز 1 با پیش ایرودینامیک 1
طراحی سازه های صنایع هوایی با پیش تحلیل سازه ها
از فیزیک 2 با پیش فیزیک 2
ترم ششم
مکانیک پرواز 2 پیش نیاز مکانیک پرواز 1 و کنترل اتوماتیک
اصول جلو برنده ها پیشنیاز ترمودینامیک 2
نقشه کشی صنعتی 2 با پیش نقشه کشی صنعتی 1
ازمایشگاه ترمو و انتقال حرارت با پیش انتقال حرارت
ازمایشگاه مهندسی برق و الکترونیک با پیش نیاز از فیزیک 2 و مهندسی برق الکترونیک
انقلاب اسلامی
تاریخ تحلیلی
اینجا شما از درسهای اصول راکتها یا توربو ماشینها یا سوخت احتراق یا سیالات عددی را انتخاب . با پیش ترمودینامیک 2 و ایرودینامیک 2و محاسبات عددی
ترم هفتم هم
طراحی هواپیما با پیش مکانیک پرواز 2
زبان تخصصی مهندسی با پیش زبان عمومی 1 لازم هست بدونید زبان خیلی مهم هست و منابع به زبان انگلیسی هستند
محاسبات عددی با پیش معادلات دیفرانسیل و الگوریتم و برنامه نویسی
اینجا شما از درسهای اصول راکتها یا توربو ماشینها یا سوخت احتراق یا سیالات عددی را انتخاب . با پیش ترمودینامیک 2 و ایرودینامیک 2و محاسبات عددی
تحلیل سازه های هوایی پیش الگوریتم و برنامه سازی
از ایرودینامیک 1 با پیش ایرودینامیک 1
کارگاه موتور و بدنه
کارگاه ورق کاری نقشه کشی صنعتی 1
تفسیر موضوعی قران
تاریخ تمدن و فرهنگ
مکانیک مدارهای فضایی پیش ریاضیات مهندسی
طراحی هواپیما 1 پیش مکانیک پرواز2
تربیت بدنی 2
ترم هشتم
طراحی هواپیما 2 با پیش نیاز طراحی هواپیما 1
آیرودینامیک2 با پیش نیاز ایرودینامیک2
پروژه تخصصی
کارآموزي
طراحی هواپیما 2 پیش طراحی هواپیما 1
کارگاه اندازه گیری ابزار دقیق
طراحی سازه های صنایع هوایی پیش تحلیل سازه های هوایی
توربو ماشینها
وصایای امام
قران
تحکیم خانواده
ینجا شما از درسهای اصول راکتها یا توربو ماشینها یا سوخت احتراق یا سیالات عددی را انتخاب . با پیش ترمودینامیک 2 و ایرودینامیک 2و محاسبات عددی انتخاب میکنید
در پایان برای ادامه تحصیل امریکا بهترین هست و کانادا مانند دانشگاه کارلتون یا دانشگاه رایرسون من خودم Leicester, University انگلیس انتخاب کردم .اگه وارد ناسا و بویینگ یا اسپیس ایکس یا ابرشرکت لاکهید مارتین ونورثروپ گرومن وپِرَت اند ویتنی که مورد علاقه من هست که تولیدکننده موتورهای جت، موتورهای موشک و موتورهای مورد استفاده در توربینهای گازی است مثال مرکز ARMD واقعا مرکز پژوهشی خوبی هست ومرکز تحقیقات گلن در شهر کلیولند، در ایالت اوهایو است.ومرکز Jet Propulsion Laboratory پاسادینای کالیفرنیا و..مرکز تحقیقات ایمز.یا مرکز فضایی لیندون بی جانسون البته در جهان مراکز ریادی هست صد البته برای پیشران و جت اینها بهترین هستند وGE Aviation Cincinnatti, OH, United Statesو Pratt & Whitney East Hartford, CT, United Statesورولز-رویس Rolls-Royce انگلیس وFM International Cincinnatti, OH, United States.I hope I help you understand
علم احتراق، رفتار سیالات، مباحث ترمودینامیک استاتیک و ارتعاشات و علم مواد.و مقاومت مواد و دینامیک اجسام سازه ها و کنترل مکانیکی و دینامیک پرواز طراحی وما در درسها و لابوراتور با cfd سرکار داریم Computational Fluid Dynamics خوب طبیعتا با نرم افزارهای زیادی سر کار داریم همون ترم های اول درس آلگوریتم ها و برنامه سازي کامپیوتر ممعمولاً زبان برنامه نویسی فرترن (Fortran) درس میدن خوب
البته ++C (سی پلاس پلاس) و– #C (سی شارپ) هست تسلط بر برنامههایی مانند متلب (matlab) انسیس فلوئنت، CFX، آباکوس و کامسول برای حل معادلاتی مانند معادلات ناویر استوکس (Navier-Stokes Equations)برای پیش بینی درگ، لیفت وبارهای ساختاری و حرارتی، احتراق و غیره، عملکرد در سیستم ها و زیرسیستم های هواپیما استفاده میشه. خوب بعضی قویترن بعضی ضعیفتر من خودم با برنامه میتونم کار کنم اما برنامه نویسیم ضعیفه .حتی لپ تاپم مشکلی نرم افزاری داره میدم بچه ها برام سرویس کنن من تو درس مبانی مدار هم چندان قوی نبودم و تو ازمایشگاه هم حتی یک هویه ساده بلد نیستم لحیم کنم تو تحلیل تئوری خوبم تو لابوراتور نه المان های الکتریکی پایه، قوانین تحلیل مدارات الکتریکی، مدارات مرتبه اول و دوم، مدارات AC و مدارات تزویج و ترانسفورماتور .(Transformator)
وبماند تحلیم خوبه تو از ضعیفترم . _(چون از برق زیاد خوشم نمیاد ) پس تو اویونیک ضعیفم ولی بازکا ربا استندهای لابوراتور مثل ژیروسکوپهای میکرومکانیکی - حرکت فرفرهای ژیروسکوپ و- ژیروسکوپ فوکو و- آونگ فوکو -فیکسر سیمپیچ بوبین - استند یک محوره اندازهگیری تراست تراستر -- استند بالزن ۶ درجه آزادی -- استند پاندول معکوس دو درجه آزادی غیرخطی-- منبع تغذیه-- اسیلوسکوپ
- دستگاه دادهبرداری-- درایور اکچوتیورها خوبم میتونم کار کنم تو کنترل مکانیکی-قواعد رسم مكان هندسي ريشه ها -تحليل سيستمهاي كنترلي توسط روش مكان هندسي ريشه ها- طراحي سيستمهاي كنترلي توسط روش مكان هندسي ريشه ها . با هدف های شبیهسازی سیستمهای دینامیکی هوافضایی خطی و غیرخطی و- شناسایی سیستمهای دینامیکی هوافضایی خطی و غیرخطی و- طراحی سیستمهای دینامیکی هوافضایی خطی و غیرخطی و بهینهسازی در واقعا تحلیل ریاضی کنترل کننده های مثل نیوماتیک بحاله نحوه مدلسازی سیستم های مختلف مکانیکی و الکتریکی و الکترومکانیکی و رفتار دینامیکی آنها هم در حوزه زمان و هم درحوزه فرکانس آنها خوب شامل تبديل لاپلاس نمايش و مدلسازي رياضي سيستم هاي مكانيكي رفتار سيستم هاي ديناميكي و.. میشه منم تو این حوزه خوبم در واقع آیرودینامیک هسته اصلی تمام برنامه های مهندسی هوافضاست.دستگاه هدایت حرارتی جامدات
چرخدندههای خورشیدی
ارتعاشات اجباری تیرها به همراه جاذب ارتعاشات
دستگاه بادامک و پیرو
شتاب ژیرسکوپی، نیروی گریز از مرکز و گاورنر
اونچه انجام میدیم اندازهگیری فشارهای استاتیک و سکون با لوله پیتوت
دوم مشاهده جریان در اطراف بالوایه دو بعدیبرای برسی اثر زاویه حمله و سرعت
- توزیع فشار بر روی یک استوانه در سرعتهای مختلف و تشخیص نقطه جدائی
اثر زبری بر روی ضریب درگ کره و استوانه
- اندازه گیری بارهای آئرودینامیکی یک ماکاپ هواپیما در سرعت زیر صوت برای تعیین زاویه حمله، زاویه جانبی و زاویه غلت و پایداری
- بررسی اثر زاویه فلپ بر روی توزیع فشار بالوایه
- بررسی لایه مرزی روی یک صفحه مسطح
- بررسی اثر رینولدز بر روی لایه مرزی
- اندازه گیری توزیع فشار به دور یک بالوایه برای محاسبه ضرائب آئرودینامیکی شبیه سازی
- کالیبره سیم داغ برای اندازه گیری سرعت و شدت توربولانس
- بررسی اشکال مختلف فلپ برای استال استاتیکی و افزایش لیفت با شبیه سازی
عملکرد نازل در فشارهای مختلف و بررسی شرایط خفگی با شبیه سازی
- بررسی توزیع فشار در طول نازل و مقایسه با مقادیر تئوری شبیه سازی
- بررسی توزیع فشار در حول نازل همگرا – واگرا شبیه سازی
- توزیع فشار در طول یک لوله با نظر ثابت برای شناسائی اثرات گرمادهی حرارت ، سرعت ، دما و ...
ترنسدیوسر فشار، لوله پیتوت، تراورس سیستم و رک فشارودستگاه هات وایر
بعدش تو کارگاه هواپیما هنده دورسنج
نشان دهنده فشار سوخت
نشان دهنده نرخ مصرف سوخت
نشان دهنده فشار روغن
انواع حرارت سنج
نشان دهنده مانیفولد
کارگاه موتور هم
ماکاپ لندینگیر و اسکرپ جند مدل موتور پیستونی
تو احتراق میز آزمایش احتراق میکرو و مزو، دستگاه آزمایش محفظه احتراق در شرایط اتمسفریک، دستگاه آزمایش محفظه چرخش دو گانه، دستگاه آزمایش بررسی اثر چرخش، دستگاه آزمایش شعله دیفیوژن، دستگاه آزمایش شعله MILD، دستگاه آزمایش بررسی جرقه و aouto ignition، دستگاه آزمایش counter-flow . در این آزمایشگاه همچنین کارهای شبیه سازی محفظه احتراق به روش CFD با نرم افزارهای Fluent ، OpenFoam و CFXانجام میدیم. تو مقاومت مصالح دستگاه Data logger استاتیکی - داده برداری-
دستگاه Data logger دینامیکی - فیکسچر تست برش تست های استاتیکی جهت تعیین چقرمگی شکست-پلاریسکوپ
تو ترمودینامیک هم سيكل تبريد تراكمي ـ ديگ مارست ـ سيكل استرلينگ ـ بمب كالريمتر ـ دستگاه تست موتور بنزيني ( سيكل اتو ) - دستگاه تست موتور دیزل (سیکل دیزل) ـ تست كمپرسور ـ تست نازلها -ازمایش ماشین بخار-آزمایش کمپرسور یک مرحلهای-آزمایش کمپرسور چند مرحلهای-آزمایش سیکل تبرید تراکمی-آزمایش سیکل تبرید جذبی آزمایش تهویه مطبوع
اینم تست کمپرسورهخوب یک مهندس فضایی با اجسام موجود در فضا سر و کار داره: از ماهواره ها، ایستگاه های فضایی، وسایل نقلیه فضایی و کاوشگرهای فضایی گرفته تا زباله های فضایی. فضا به معنای ارتعاشات پرتاب وخلاء، نگرانی های تشعشعات، شیب ها و temperature tolerance of objects ، مسیرهای پیچیده، بدون تعمیر و نگهداری شما هواپیما یا وسیله زیر جوی نیست بشه تعمیرش کرد باید طوری بسازی که امکان خطا تقریبا صفر شود .برای همین صدها بار تست میشه .
تشعشع حرارتیب رای (تعیین ضریب صدور) و آزمایش جابجایی آزاد استفاده میشه مهندس هوانوردی با اشیاء موجود در هوا سر و کار داره اما نه در فضا عموما همه انواع هواپیماها و هلیکوپترها، اما بالون ها و موشک ها نیز در این کلاس هستند. منم موندم ولی فضا را انتخاب با گرایش پیشران .این رشته جذاب و فوق العاده ای هست. البته من به همین خاطر انتخابش کردم .حال جدا از بازار کار و اینها من صرفا جهت علاقه میگم چون میتونی کارهای طراحی، مدلسازی، آزمایش ها، ارزیابی و ساخت تولید را انجام بدید و همچنین به روز بودن و آگاهی از جدید ترین پیشرفت هاوتوانایی خوب در تحلیل مسایل و همچنین نظارت و هماهنگی در ساخت، مونتاژ، اصلاح، تعمیر و بررسی هواپیماها و فضاپیماها برای من جنبه غیر نظامی اون مهم هست هر کس بسته به علاقه به گرایش خاصی میتونه انتخاب کنه .اساسادرسهای اصلی اون بر پایه علم آیرودینامیک.- علم پیشرانش.- الکترونیک پرواز.
علم مواد.- آنالیز سازه ها.- مکانیک.- متالوژی. هستش.این رشته با طراحی هواپیما، فضاپیما، ماهواره، ماهواره برها و همچنین طراحی و ساخت هلیکوپتر، هواپیمای بدون سرنشین، بدون موتور، عمود پرواز و یا جنگنده و ساخت پایگاه های فضایی وخوب برسی سوانح هوایی وفضایی Aviation accidents and incidentsو البته مهارت تو نرم افزار های زیر
Catia: نرمافزار طراحی قطعات
Ansys: نرمافزاری برای تحلیل مهندسی قطعات در تحلیلهای دینامیکی
Fluent : نرمافزار مدل کردن جریان سیال و انتقال حرارت در هندسههای پیچیده
ABAQUS : نرم افزاری برای تحلیل های المان محدود
XFLR5 : نرمافزاری مفید برای آغاز یادگیری هوافضا
Unigraphics : نرم افزار مدل سازی و طراحی قطعات
Matlab : نرمافزاری برای نوشتن برنامه و محاسبات ریاضی در مهندسی
همون طور كه مي دونيد، رشته هوافضا اشتراك زيادي با رشته مكانيك داره خوب اکثر درسهای من با اونها مشترک هست در زير ليست دروس هوافضا رو كه يه دانشجوي هوافضايي از ترم اول ميخونه به ترتيب براتون گذاشتم.در كنار هر درس من كتابي كه در رشته هوافضاکه معرفی میکنند قرار دادم. در واقع ما بچه های هوافضایی همين كتاب ها رو ميخونيم البته به نظر استادها کمی فرق داره
رياضي عمومي 1 و 2 -عبدالله شيدفر-
فيزيك عمومي 1 و 2 – هاليدي-بنسون
مقدمه ای بر هوافضا هیوبرت اسمیت، عبدالعلی حقیری (مترجم)
استاتيك – مريام
مقاومت مصالح – جانستون-
ديناميك–مريام )تشریح کامل مسایل دینامیک مریام و کرایگ
دارای هفت فصل مختلف می باشد مه برای درک و فهم بیشتر و ساده تر دانشجویان مربوطه ، به دو قسمت مجزا تقسیم شده اند.
بخش اول : دینامیک ذرات شامل چهار فصل با عنوان های
فصل اول : آشنایی با دینامیک
فصل دوم : سینماتیک ذرات
فصل سوم : سینتیک ذرات
فصل چهارم : سینتیک مجموعه ی ذرات
بخش دوم : دینامیک اجسام صلب شامل سه فصل با عنوان های
فصل پنجم : سینماتیک اجسام صلب در صفحه
فصل ششم : سینتیک اجسام صلب در صفحه
فصل هفتم : مقدمه ای بر دینامیک سه بعدی اجسام صلب
معادلات ديفرانسيل – عبدالله شيدفر –سیمونز
رياضيات مهندسي- چرچيل- يا شيدفر
ارتعاشات – تامسون
ترموديناميك مهندسي- ون وايلن – سنجل
مكانيك سيالات -فاكس – وايت
تحليل سازه – بديعي
انتقال حرارت –-فرانك اينكروپرا
طراحي سازه- براون – مگسون
طراحي اجزا 1 و2– شيگلي
آيروديناميك 1 و 2 – اندرسون
مكانيك پرواز1 و 2-دكتر هاشم صدرايي – نلسون – مک لین
اصول جلوبرنده ها – هیل پترسون – فلک-هنری کوهن
طراحي هواپيما 1 و 2 – دكتر هاشم صدرايي – راسكم – تورنبیک – ریمر
خوب یکسری دروس پایه داریم معادلات دیفرانسیل
ریاضی عمومی ۱ و ۲
برنامه نویسی کامپیوتر
محاسبات عددی
فیزیک ۱ و ۲ هریس بنسون-هالیدی
آزمایشگاه فیزیک ۱
استاتیک مریام
علم مواد وحید ایوبی
ریاضیات مهندسی اروین کریزیگ-دکتر بنی فاطمی-چرچيل- يا شيدفر
و تخصصی
نقشه کشی صنعتی
مقاومت مصالح و آزمایشگاه--بیر جانسون
دینامیک عمومی
مکانیک سیالات
ترمودینامیک ۱و ۲
ارتعاشات مکانیکی
دینامیک پرواز--Roskam
کنترل اتوماتیک-بنجامین کو
تحلیل سازه های هوایی
آزمایشگاه مکانیک
انتقال حرارت ۱ فرانك اينكروپرا
آیرودینامیک ۱ و آزمایشگاه
آیرودینامیک ۲ و آزمایشگاه
طراحی به کمک رایانه
طراحی اجزای ماشین ۱ شیگلی
کارگاه ورق کاری
مکانیک پرواز
مبانی مهندسی برق و آزمایشگاه
مقدمه ای بر مهندسی هوافضا
کارگاه موتورهای هواپیما
زبان تخصصی
طراحی هواپیما ۱ و ۲ جان راسکم
اصول جلو برنده ها کوهن (Cohen
طراحی سازه های هوایی مگسون
مکانیک مدارهای فضایی تالیف: هاوارد دی. کرتیس
یکسری انتخابی داریم
آمار و احتمالات مهندسی دکتر نادر نعمت الهی
روشهای تجربی در آیرودینامیک Stefano Discetti
سوخت و احتراق ابراهیم افشاری مرتضی نیکخواه قمصری یاسر ملایی برزی
آیرودینامیک هلی کوپتر
تئوری آیرودینامیک ملخ
مقدمه ای بر مکانیک سیالات عددی
آشنایی با هواپیماها و سلاح های هوایی
آشنایی با سامانه های ارتباط هوایی و جنگال
دستورالعمل های فنی
سامانه مدیریت ایمنی
موتورهای احتراق داخلی بنجامین هیوود-چارلز فایت تیلر
اصول راکت ها جرج ساتون
توربین های گازی مهدی ملک پور
توربو ماشین ها مکانیک سیالات و ترمودینامیک توربوماشینها تالیف دیکسون (Dixon)
طراحی، کنترل و کاربرد سیستم های ماهواره ای
پروژه و یکسری دروس عمومی داریم ندیشه اسلامی 1و2
ادبیات فارسی
اخلاق و تربیت اسلامی
زبان عمومی خلیلی
انقلاب اسلامی و ریشه های آن
تربیت بدنی 1
تاریخ تحلیلی صدر اسلام
تربیت بدنی 2
تفسیر موضوعی قرآن
فرهنگ و تمدن اسلامی
البته شما تو 8 ترم کارشناسی و بعد گرایش انتخاب میکنید من خودم پیشران انتخاب میکنم
آیرودینامیک
این گرایش از مهمترین پایههای هوافضا بهشمار میرود. علم آیرودینامیک به مطالعه و بررسی جریان هوا و محاسبه نیروها و گشتاورهای ناشی از آن بر روی جسم پرنده، میپردازد. مهندسین هوافضا در این گرایش جریانهای پیچیده در اطراف جسم پرنده را تحلیل میکنند و با بدست آوردن نیروهای آیرودینامیکی به بررسی پایداری و طراحی سازه شناور در سیال میپردازند. به جز تحلیل، همواره یکی از اصلیترین دغدغههای مهندسین آیرودینامیک، طراحی بالها و بدنههایی با بیشترین کاربرد و کمترین هزینه است.
پیشرانش
دانش پیشرانهها به مطالعه و بررسی سامانههای جلوبرنده (موتور)، اعم از موتورهای هوازی و غیرهوازی میپردازد. موتورهای هوازی شامل موتورهای پیستونی و چرخپرهای (توربینی) است که از هوا بهعنوان اکسیدکننده استفاده نموده و سوخت را با خود حمل میکنند. اما موتورهای غیرهوازی مانند موتور موشکها و فضاپیماها است که سوخت و اکسیدکننده را با خود حمل میکنند. در این دانش نحوه تولید نیروی رانش و همچنین ساختار کلی انواع موتورهای هوافضایی بررسی و مورد تجزیه و تحلیل قرار میگیرد. طراحی و تعیین میزان عملکرد انواع سامانههای جلوبرنده نیز بسیار مورد توجه مهندسین پیشرانش هستند. این گرایش بسیار شبیه به مکانیک - تبدیل انرژی و سیستمهای انرژی میباشد مورد علاقه من این گرایش هست
دینامیک پرواز و کنترل
هدف کلی در گرایش دینامیک پرواز و کنترل بررسی حرکت وسایل پروازی و تعیین موقعیت و وضعیت آنها در هوا/فضا و در نهایت هدایت و کنترل مطلوب آنها می¬باشد. بدون داشتن چنین توانمندیهایی استفاده از موتورهای پر قدرت، آیرودینامیک مناسب و سازه های مستحکم محکوم به شکست است. علاوه بر این طراحی انواع وسایل پروازی از قبیال انواع هواپیماهای با و بدون سرنشین، بالگردها و ... در حوزه کاری متخصصین این رشته قرار دارد.
شبیه سازی پرواز وسایل پروازی از قبیل هواپیما، ماهواره و ...
ناوبری وسایل پروازی
متخصص ابزار و آلات دقیق هواپیما
متخصص کنترل وسایل پروازی
متخصص هدایت و طراحی مسیر بهینه وسایل پروازی
متخصص طراحی انواع وسایل پرنده نظیر هواپیما، پهپاد، ماهواره بر و ...
سازههای هوافضایی
طراحی سازه های مناسب برای حفظ وسیله پرنده در شرایط مختلف میباشد. منظور از سازه مناسب ، سازه ایست که نه تنها استحکام کافی دارد بلکه شرایط صلبیت، ارتعاشات ، خستگی و ..
متخصص طراحی سازه اجزا هواپیما نظیر بال ، دوم و بدنه
متخصص طراحی سازه موشک و ماهواره و ...
متخصص در تحلیل انواع سازه های انعطاف پذیر ، کامپوزیتی و هوشمند
گرایش مهندسی فضا یکی از گرایش های در مقطع کارشناسی ارشد رشته هوافضا است که به مباحث سامانه های فضایی از جمله ماهواره برها و سیستم های درونی آن می پردازد. این گرایش که از گرایش مکانیک پرواز جدا شده شباهت زیادی از لحاظ کاربردی به گرایش مکانیک پرواز دارد.. نرم افزارهای شبیه سازی در این بخش ترکیبی از نرم افزارهای محاسباتی و نرم افزارهای گرایش مکانیک پرواز است.
خوب تو ترم اول جدول ارائه ترمی دروس رشته هوافضا
نیمسال اول
1ریاضی عمومی1پایه-
2فیزیک1--هم نیازش----ریاضی عمومی1
3فارسی عمومی
4زبان عمومی
5آلگوریتمهاوبرنامه سازي کامپیوتر
6مقدمه اي برمهندسی هوافضا
7نقشه کشی صنعتی
نیمسال دوم
1ریاضی عمومی 2پیش نیاز ریاضی عمومی1-
2فیزیک2 پایه فیزیک1-
3معادلات دیفرانسیل پیش نیاز - -ریاضی عمومی2
4استاتیک ریاضی عمومی1 وفیزیک1
5آزمایشگاه فیزیک1 پیش نیاز فیزیک1-
6اندیشه اسلامی1
7اخلاق اسلامی یا آیین زندگی
8تربیت بدنی1
ترم سوم شما
1دینامیک پیش نیاز استاتیک
2مقاومت مصالح پیش نیاز استاتیک
3مکانیک سیالات پیش نیاز معادلات دیفرانسیل هم نیاز دینامیک
4ریاضی مهندسی پیش نیاز معادلات دیفرانسیل
5ترمودینامیک1 پیش نیاز معادلات دیفرانسیل و فیزیک 1
6اندیشه اسلامی 2
ترم چهارم شما
مبانی مهندسی برق و الکترونیک پیش نیاز فیزیک 2
2ترمودینامیک2 با پیش نیاز ترمودینامیک 1
3آیرودینامیک با پیش نیاز مکانیک سیالات
4تحلیل سازه ها با پیش الگوریتم و برنامه نویسی و مقاومت مصالح
5 علم مواد با پیش مقاومت مصالح
6 ارتعاشات مکانیکی با پیش دینامیک و ریاضی مهندسی
7 ازمایشگاه مقاومت مصالح پیش نیاز مقاومت مصالح
8-طراحی اجزاء ماشین پیش دینامیک
ترم پنجم
کنترل مکانیکی با هم نیاز ارتعاشات مکانیکی
انتقال حرارت با پیش نیاز ترمودینامیک 1
ازمایشگاه مکانیک سیالات پیش نیاز مکانیک سیالات
ایرودینامیک2 با پیش ایرودینامیک 1
مکانیک پرواز 1 با پیش ایرودینامیک 1
طراحی سازه های صنایع هوایی با پیش تحلیل سازه ها
از فیزیک 2 با پیش فیزیک 2
ترم ششم
مکانیک پرواز 2 پیش نیاز مکانیک پرواز 1 و کنترل اتوماتیک
اصول جلو برنده ها پیشنیاز ترمودینامیک 2
نقشه کشی صنعتی 2 با پیش نقشه کشی صنعتی 1
ازمایشگاه ترمو و انتقال حرارت با پیش انتقال حرارت
ازمایشگاه مهندسی برق و الکترونیک با پیش نیاز از فیزیک 2 و مهندسی برق الکترونیک
انقلاب اسلامی
تاریخ تحلیلی
اینجا شما از درسهای اصول راکتها یا توربو ماشینها یا سوخت احتراق یا سیالات عددی را انتخاب . با پیش ترمودینامیک 2 و ایرودینامیک 2و محاسبات عددی
ترم هفتم هم
طراحی هواپیما با پیش مکانیک پرواز 2
زبان تخصصی مهندسی با پیش زبان عمومی 1 لازم هست بدونید زبان خیلی مهم هست و منابع به زبان انگلیسی هستند
محاسبات عددی با پیش معادلات دیفرانسیل و الگوریتم و برنامه نویسی
اینجا شما از درسهای اصول راکتها یا توربو ماشینها یا سوخت احتراق یا سیالات عددی را انتخاب . با پیش ترمودینامیک 2 و ایرودینامیک 2و محاسبات عددی
تحلیل سازه های هوایی پیش الگوریتم و برنامه سازی
از ایرودینامیک 1 با پیش ایرودینامیک 1
کارگاه موتور و بدنه
کارگاه ورق کاری نقشه کشی صنعتی 1
تفسیر موضوعی قران
تاریخ تمدن و فرهنگ
مکانیک مدارهای فضایی پیش ریاضیات مهندسی
طراحی هواپیما 1 پیش مکانیک پرواز2
تربیت بدنی 2
ترم هشتم
طراحی هواپیما 2 با پیش نیاز طراحی هواپیما 1
آیرودینامیک2 با پیش نیاز ایرودینامیک2
پروژه تخصصی
کارآموزي
طراحی هواپیما 2 پیش طراحی هواپیما 1
کارگاه اندازه گیری ابزار دقیق
طراحی سازه های صنایع هوایی پیش تحلیل سازه های هوایی
توربو ماشینها
وصایای امام
قران
تحکیم خانواده
ینجا شما از درسهای اصول راکتها یا توربو ماشینها یا سوخت احتراق یا سیالات عددی را انتخاب . با پیش ترمودینامیک 2 و ایرودینامیک 2و محاسبات عددی انتخاب میکنید
در پایان برای ادامه تحصیل امریکا بهترین هست و کانادا مانند دانشگاه کارلتون یا دانشگاه رایرسون من خودم Leicester, University انگلیس انتخاب کردم .اگه وارد ناسا و بویینگ یا اسپیس ایکس یا ابرشرکت لاکهید مارتین ونورثروپ گرومن وپِرَت اند ویتنی که مورد علاقه من هست که تولیدکننده موتورهای جت، موتورهای موشک و موتورهای مورد استفاده در توربینهای گازی است مثال مرکز ARMD واقعا مرکز پژوهشی خوبی هست ومرکز تحقیقات گلن در شهر کلیولند، در ایالت اوهایو است.ومرکز Jet Propulsion Laboratory پاسادینای کالیفرنیا و..مرکز تحقیقات ایمز.یا مرکز فضایی لیندون بی جانسون البته در جهان مراکز ریادی هست صد البته برای پیشران و جت اینها بهترین هستند وGE Aviation Cincinnatti, OH, United Statesو Pratt & Whitney East Hartford, CT, United Statesورولز-رویس Rolls-Royce انگلیس وFM International Cincinnatti, OH, United States.I hope I help you understand
-
rohamavation
نام: roham hesami radرهام حسامی راد
محل اقامت: 100 مایلی شمال لندن جاده آیلستون، لستر، لسترشر. LE2
عضویت : سهشنبه ۱۳۹۹/۸/۲۰ - ۰۸:۳۴
پست: 3286-
سپاس: 5494
- جنسیت:
تماس:
Re: هوافضا
ϕ در مکانیک مداری چیست؟به نظر می رسد این عرض جغرافیایی (ψ) باشد که زاویه بین صفحه استوایی و نقطه روی سطح بیضی است. می توان آن را از عرض جغرافیایی (همچنین به عنوان عرض جغرافیایی شناخته می شود) (φ) و خروج از مرکز بیضی (e) محاسبه کرد:
$\psi(\phi)=\tan^{-1}\left(\left(1-e^2\right)\tan\phi\right)$
اگر e=0، دو عرض جغرافیایی یکسان هستند، زیرا تمرکز در مرکز بیضی است.
ممکن است استفاده از این عرض جغرافیایی برای توصیف موقعیت یک جسم در حال گردش منطقی تر باشد، اما بردار از کانون به موقعیت جسم (r, θ) عمود بر مولفه مماسی بردار سرعت جسم است، به این معنی که عرض جغرافیایی زمین شاید بهتر.
به این جهت ها در مدار چه می گویند؟فرض کنید یک فضاپیما در مداری مانند این است:
اگر فلش های قرمز به سمت پیشروی و رتروگراد و فلش های آبی به حالت عادی و غیرعادی اشاره می کنند، فلش های سبز به چه چیزی اشاره می کنند؟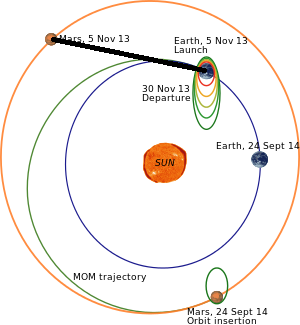
به عبارت دیگر، جهت هایی را که هم بر پیشروی مدار و هم بر مدار عادی عمود هستند، چه می نامند؟
توجه داشته باشید که گفتن «به سمت سیاره» یا «دور از سیاره» لزوماً صحیح نیست. در مدارهای بسیار غیرعادی مانند تصویر ی که دادم هر دو جهت می توانند "دور" را نشان دهند.در هر مداری 3 جهت وجود دارد. کنوانسیون معمولی این است:
Nadir-پاسو-جهتی گفته میشود که درست در پایین پای ناظر قرار دارد. این جهت به سمت مرکز سیاره، مستقیم به پایین است. در مقابل Nadir-، اوج قرار دارد.نادیر همچنین به هندسه مشاهده رو به پایین یک ماهواره در مدار اشاره دارد، مانند زمانی که در هنگام سنجش از راه دور اتمسفر، و همچنین زمانی که یک فضانورد هنگام اجرای یک پیاده روی فضایی با زمین روبرو می شود،
بردار سرعت - جهت حرکت، پیشروی / رتروگراد معمول است، پیشروی جهت مدار است، رتروگراد مخالف
جهت عادی به صفحه مدار. این اغلب به عنوان بردار حرکت زاویه ای نامیده می شود.
از طرف دیگر، حرکت نسبت به این سه محور را می توان با استفاده از اصطلاحات هوانوردی roll، pitch و انحراف برای توصیف وضعیت یک ماهواره توصیف کرد، اما اینها واقعاً طرفین را نشان نمی دهند، فقط چرخش جسم را نسبت به x، y، z نشان می دهند. محورهای (در مورد شما قرمز، آبی، سبز) به ترتیب در سیستم مختصات دکارتی.
چرا یک فضاپیما به جای حرکت در یک خط مستقیم، از مدار منحنی برای رفتن به مقصد استفاده می کند؟این رشته مکانیک مداری نامیده می شود. یک جسم در مدار به روشی رفتار می کند که اگر شما به طور کامل متوجه آنچه در حال رخ دادن نیست، غیرقابل درک است.
رسیدن به مداری که ترسیم کرده اید تقریبا غیرممکن است. هنگامی که یک فضاپیما از زمین به مریخ می رود، به دور خورشید می چرخد. هر کاری که انجام می دهد تحت تأثیر جاذبه گرانشی خورشید است. وقتی زمین را ترک می کنید و شتاب می گیرید، در یک خط مستقیم پرواز نخواهید کرد: مسیر شما منحنی خواهد بود زیرا خورشید مدام شما را می کشد. این منحنی است که در مسیر MOM می بینید.
اگر واقعاً مسیری مستقیم می خواهید، باید سوخت زیادی را برای خنثی کردن کشش خورشید خرج کنید. این سوخت بسیار بیشتر از یک مدار منحنی مصرف می کند.پاسخ کوتاه این است: یک خط مستقیم در فضا فقط با شتاب پیوسته امکان پذیر است (زیرا خورشید بدون شتاب مسیر را مجبور می کند بسته به انرژی کل مسیر را به یک مدار بیضوی یا هذلولی تبدیل کند).
اگر محاسبات را انجام دهید (و مهندسان طراحی ماموریت آن را تمام روز انجام می دهند) همچنین متوجه خواهید شد که انرژی مورد نیاز (بخوانید سوخت) در مقایسه با مسیر پرواز (مسیر در زبان فضایی) با ساحل در امتداد یک مسیر بیضوی افزایش می یابد. کارآمدترین مسیر انرژی بین دو مدار دایره ای، مدار انتقال هومان است. این مسیر اساساً شامل یک فشار کوتاه اولیه (دلتا v در زبان فضایی) برای تغییر مدار از دایره ای به بیضوی، سپس به مدار دایره ای بزرگ، سپس یک فشار کوتاه دیگر برای تبدیل مجدد مدار بیضی به یک دایره است.
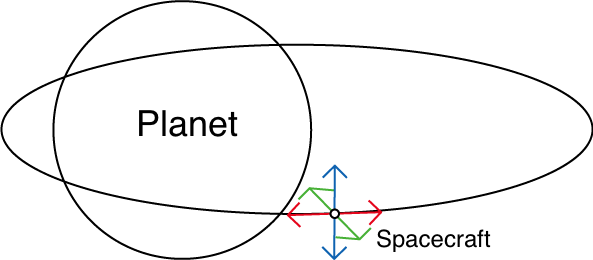
آیا اندازه ماهواره تاثیری در مدار دارد؟
من میدانم که ماهوارههای سبکتر سریعتر در مدار میچرخند. 2 ماهواره وجود دارند که وزنشان یکسان است اما یکی در مقایسه با آن بزرگ و دیگری کوچک است. آیا اندازه ماهواره در مدار تفاوتی ایجاد می کند؟کاملا! پارامتری که اعمال می شود ضریب بالستیک است، جرم جسم تقسیم بر مساحت پیش بینی شده آن که با ضریب درگ اصلاح شده است. نیروی کشش توسط
$F_{\text{drag}}=-\frac{1}{2} C_{\text{drag}} A \rho V^2
$جایی که:$C_{\text{drag}}$ضریب درگ است (در سرعت های مداری و چگالی اتمسفر معمولاً بسیار نزدیک به 2 است).
A منطقه پیش بینی شده است.
ρ چگالی جرم اتمسفر است. وV سرعت نسبت به جو اطراف است.
علامت منفی جلو می گوید که نیروی کشش در جهت مخالف جهت سرعت است. شتاب، در این مورد کاهش سرعت، $a_{\text{drag}}=\frac{F_{\text{drag}}}{m}$ است، که m جرم جسم است، بنابراین عبارت $F_{\text{drag}}$ را بر m تقسیم کنید و شتاب دریافت می کنید. در این عبارت جدید، CdragAm، معکوس ضریب بالستیک است،
$\text{BC} = \frac{m}{C_{\text{drag}}A}
\,.$هر چه این عدد بیشتر باشد، یعنی جرم جسم در واحد سطح بیشتر باشد، کاهش سرعت کمتر خواهد بود و چرخش آن بیشتر طول می کشد تا فروپاشی کند.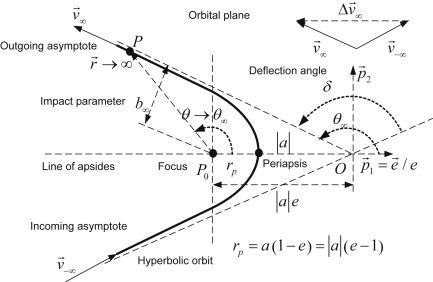
جالب اینجاست که گرادیان عمودی بسیار کوچک در چگالی اتمسفر در اجسام در حال پوسیدگی خود را نشان میدهد، اگر آنها با گرادیان گرانشی تثبیت نشده باشند (کاغذ).
چگالی کمی افزایش یافته در سمت پایین فضاپیما نیروی پسا بیشتری را در واحد سطح در آنجا تولید می کند و فضاپیما شروع به چرخش می کند!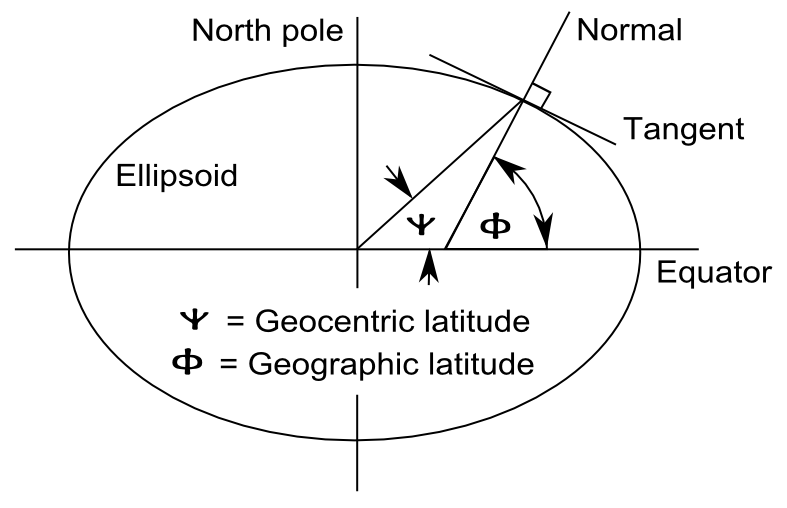
چرا زاویه خمش یک مسیر هذلولی نتایج متفاوتی می دهد؟زاویه خمش (δ) زاویه بازتابی بین دو مجانب یک مسیر هذلولی است.
خط سیر هذلولی برچسب گذاری شده است
، فرمول محاسبه زاویه خمش به صورت زیر است:
$\delta = 2 \sin^{-1}\bigg( \frac{1}{e} \bigg)$
جایی که e خارج از مرکز است و به صورت زیر محاسبه می شود:
$e = \frac{rv_\infty^2}{\mu}+1$
جایی که r فاصله فضاپیما از جسم در طول نزدیکترین نزدیک شدن (پریاپسیس) و $v_\infty$ سرعتی است که گویی جسم گرانشی آنجا نبوده است.
من یک مقدار دلخواه برای $v_\infty$ که 21000 متر بر ثانیه است و ارتفاع دلخواه مدار که 60000 کیلومتر از مرکز سیاره است (که شعاع آن 6371 کیلومتر است) قرار دادم تا مقدار کل$r = 6.6371 \times 10^7$ باشد.GM سیاره نیز ساخته شده است، بنابراین $\mu = 1.47 \times 10^{14}$. این به من e=200.113$ $می دهد. و وقتی e را به معادله 1 جایگزین کنم،$ δ=0.573 $بدست می آید.
من این مسیر هذلولی را روی Desmos ترسیم کردم و در اینجا نمودار برای مرجع است (خطوط نقطه چین مجانبی هستند).
توجه داشته باشید، a = 500، و b = 100055.25 زیرا با استفاده از معادله خروج از مرکز هذلولی $e = \frac{\sqrt{a^2+b^2}}{a}$، خروج از مرکز 200.113 به دست می آید. کاری که من اساساً انجام دادم این بود که یک مقدار دلخواه a را انتخاب کردم و برای b حل کردم تا خروجی 200.113 به دست آید.
سوال: تصویر بالا نشان می دهد که این مسیر هذلولی به وضوح زاویه خمش بسیار بزرگی دارد، در حدود 180 درجه (در واقع کمتر اما در چشم 180 درجه به نظر می رسد). اما فرمول 1 نتیجه $\delta = 0.573$ را داد. این نمی تواند درجه باشد. اما رادیان هم نیست زیرا $0.573 rad = 32^o$. نمی تواند قوس دقیقه یا آرک سکانت باشد. من فکر کردم که بایدتحول باشد. اما یک چرخش بیشتر از 0.5 مقدار درجه ای بیشتر از 180 درجه را ایجاد می کند که زاویه خمش کمتر از آن است. اینجا چه خبره؟ آیا من چیزی را اشتباه متوجه شده ام؟دو موضوع عمده وجود دارد که می توانم ببینم.
هر چیزی که برای محاسبه arcsin استفاده می کنید، در واقع مقداری را بر حسب درجه به شما می دهد.
پارامترهایی که ارائه کردهاید اساساً مربوط به مسابقه ماهوارهای با یک جسم در فاصله متوسط است که در تمام طول مسیر خود بسیار بالاتر از سرعت فرار حرکت میکند. نه به اندازه کافی نزدیک می شود و نه به اندازه کافی در اطراف معلق می ماند تا یک خم مسیر قابل توجه داشته باشد، بنابراین بله، زاویه انحراف تقریباً 0.57 درجه است.
همچنین، مقادیر انتخابی شما برای تولید خروج از مرکز 200 خاموش است. $\frac{\sqrt{500^2 + 4444^2}}{500} = 8.944$
برای گسترش بیشتر، من معمولاً از مقاطع مخروطی قطبی برای مدارها استفاده می کنم. هنگام کار با معادلات کپلر راحت تر می توان با آنها کنار آمد.
شما فاصله پری آپسیس و خروج از مرکز را دارید: (ویرایش: در ابتدا پری آپسی 10 برابر بیش از حد بزرگ بود)
$r_p = 6.67 \times 10^7m$
e=200از آنجا، می توانید نیم محور اصلی a را به صورت زیر محاسبه کنید:$a = \frac{r_p}{1-e} = -3.34 \times 10^5 m$
و معادله قطبی هذلولی حاصل به صورت زیر است:
$r = \frac{a(1-e^2)}{1 + e\cos \theta}= \frac{r_p(1+e)}{1 + e\cos \theta}$
و پرواز شما از دنیایی که انتخاب کرده اید به این صورت است:
اول از همه، مقدار δ شما به وضوح بر حسب درجه است. با خروج از مرکز 200، 1/e متقابل آنقدر کوچک است که تقریباً برابر است با سینوس معکوس خود - بر حسب رادیان. δ اساساً 2/200 رادیان = 0.573 درجه است.
در مرحله بعد، متوجه شوید که از نظر هندسی، خروج از مرکز هذلولی برابر است با تقسیم فاصله مرکز به کانون بر فاصله مرکز به راس. با شکل شما برای هذلولی که دارای رئوس روی محور y است، فاصله اول $\sqrt{a^2+b^2}$ و فاصله دوم b (نه a) است.
برای خروج از مرکزیت بالایی که رندر میدهید، باید یک بزرگتر از b داشته باشید، نه برعکس، و علاوه بر این، نسبت بین آنها باید بسیار بیشتر از 4444/500 باشد که در اینجا در نظر گرفته شده است. وقتی خروج از مرکزیت هذلولی که در بالا توضیح داده شد بیشتر از 10 باشد، عبارت b2 زیر رادیکال بسیار کوچک است، بنابراین خروج از مرکز فقط کمی با a/b متفاوت است. بنابراین، برای خروج از مرکز 200، شما اساساً نیاز دارید که a 200 برابر b باشد، نه نسبت 8.888 که در اینجا داده شده است.
$\psi(\phi)=\tan^{-1}\left(\left(1-e^2\right)\tan\phi\right)$
اگر e=0، دو عرض جغرافیایی یکسان هستند، زیرا تمرکز در مرکز بیضی است.
ممکن است استفاده از این عرض جغرافیایی برای توصیف موقعیت یک جسم در حال گردش منطقی تر باشد، اما بردار از کانون به موقعیت جسم (r, θ) عمود بر مولفه مماسی بردار سرعت جسم است، به این معنی که عرض جغرافیایی زمین شاید بهتر.
به این جهت ها در مدار چه می گویند؟فرض کنید یک فضاپیما در مداری مانند این است:
اگر فلش های قرمز به سمت پیشروی و رتروگراد و فلش های آبی به حالت عادی و غیرعادی اشاره می کنند، فلش های سبز به چه چیزی اشاره می کنند؟
به عبارت دیگر، جهت هایی را که هم بر پیشروی مدار و هم بر مدار عادی عمود هستند، چه می نامند؟
توجه داشته باشید که گفتن «به سمت سیاره» یا «دور از سیاره» لزوماً صحیح نیست. در مدارهای بسیار غیرعادی مانند تصویر ی که دادم هر دو جهت می توانند "دور" را نشان دهند.در هر مداری 3 جهت وجود دارد. کنوانسیون معمولی این است:
Nadir-پاسو-جهتی گفته میشود که درست در پایین پای ناظر قرار دارد. این جهت به سمت مرکز سیاره، مستقیم به پایین است. در مقابل Nadir-، اوج قرار دارد.نادیر همچنین به هندسه مشاهده رو به پایین یک ماهواره در مدار اشاره دارد، مانند زمانی که در هنگام سنجش از راه دور اتمسفر، و همچنین زمانی که یک فضانورد هنگام اجرای یک پیاده روی فضایی با زمین روبرو می شود،
بردار سرعت - جهت حرکت، پیشروی / رتروگراد معمول است، پیشروی جهت مدار است، رتروگراد مخالف
جهت عادی به صفحه مدار. این اغلب به عنوان بردار حرکت زاویه ای نامیده می شود.
از طرف دیگر، حرکت نسبت به این سه محور را می توان با استفاده از اصطلاحات هوانوردی roll، pitch و انحراف برای توصیف وضعیت یک ماهواره توصیف کرد، اما اینها واقعاً طرفین را نشان نمی دهند، فقط چرخش جسم را نسبت به x، y، z نشان می دهند. محورهای (در مورد شما قرمز، آبی، سبز) به ترتیب در سیستم مختصات دکارتی.
چرا یک فضاپیما به جای حرکت در یک خط مستقیم، از مدار منحنی برای رفتن به مقصد استفاده می کند؟این رشته مکانیک مداری نامیده می شود. یک جسم در مدار به روشی رفتار می کند که اگر شما به طور کامل متوجه آنچه در حال رخ دادن نیست، غیرقابل درک است.
رسیدن به مداری که ترسیم کرده اید تقریبا غیرممکن است. هنگامی که یک فضاپیما از زمین به مریخ می رود، به دور خورشید می چرخد. هر کاری که انجام می دهد تحت تأثیر جاذبه گرانشی خورشید است. وقتی زمین را ترک می کنید و شتاب می گیرید، در یک خط مستقیم پرواز نخواهید کرد: مسیر شما منحنی خواهد بود زیرا خورشید مدام شما را می کشد. این منحنی است که در مسیر MOM می بینید.
اگر واقعاً مسیری مستقیم می خواهید، باید سوخت زیادی را برای خنثی کردن کشش خورشید خرج کنید. این سوخت بسیار بیشتر از یک مدار منحنی مصرف می کند.پاسخ کوتاه این است: یک خط مستقیم در فضا فقط با شتاب پیوسته امکان پذیر است (زیرا خورشید بدون شتاب مسیر را مجبور می کند بسته به انرژی کل مسیر را به یک مدار بیضوی یا هذلولی تبدیل کند).
اگر محاسبات را انجام دهید (و مهندسان طراحی ماموریت آن را تمام روز انجام می دهند) همچنین متوجه خواهید شد که انرژی مورد نیاز (بخوانید سوخت) در مقایسه با مسیر پرواز (مسیر در زبان فضایی) با ساحل در امتداد یک مسیر بیضوی افزایش می یابد. کارآمدترین مسیر انرژی بین دو مدار دایره ای، مدار انتقال هومان است. این مسیر اساساً شامل یک فشار کوتاه اولیه (دلتا v در زبان فضایی) برای تغییر مدار از دایره ای به بیضوی، سپس به مدار دایره ای بزرگ، سپس یک فشار کوتاه دیگر برای تبدیل مجدد مدار بیضی به یک دایره است.
آیا اندازه ماهواره تاثیری در مدار دارد؟
من میدانم که ماهوارههای سبکتر سریعتر در مدار میچرخند. 2 ماهواره وجود دارند که وزنشان یکسان است اما یکی در مقایسه با آن بزرگ و دیگری کوچک است. آیا اندازه ماهواره در مدار تفاوتی ایجاد می کند؟کاملا! پارامتری که اعمال می شود ضریب بالستیک است، جرم جسم تقسیم بر مساحت پیش بینی شده آن که با ضریب درگ اصلاح شده است. نیروی کشش توسط
$F_{\text{drag}}=-\frac{1}{2} C_{\text{drag}} A \rho V^2
$جایی که:$C_{\text{drag}}$ضریب درگ است (در سرعت های مداری و چگالی اتمسفر معمولاً بسیار نزدیک به 2 است).
A منطقه پیش بینی شده است.
ρ چگالی جرم اتمسفر است. وV سرعت نسبت به جو اطراف است.
علامت منفی جلو می گوید که نیروی کشش در جهت مخالف جهت سرعت است. شتاب، در این مورد کاهش سرعت، $a_{\text{drag}}=\frac{F_{\text{drag}}}{m}$ است، که m جرم جسم است، بنابراین عبارت $F_{\text{drag}}$ را بر m تقسیم کنید و شتاب دریافت می کنید. در این عبارت جدید، CdragAm، معکوس ضریب بالستیک است،
$\text{BC} = \frac{m}{C_{\text{drag}}A}
\,.$هر چه این عدد بیشتر باشد، یعنی جرم جسم در واحد سطح بیشتر باشد، کاهش سرعت کمتر خواهد بود و چرخش آن بیشتر طول می کشد تا فروپاشی کند.
جالب اینجاست که گرادیان عمودی بسیار کوچک در چگالی اتمسفر در اجسام در حال پوسیدگی خود را نشان میدهد، اگر آنها با گرادیان گرانشی تثبیت نشده باشند (کاغذ).
چگالی کمی افزایش یافته در سمت پایین فضاپیما نیروی پسا بیشتری را در واحد سطح در آنجا تولید می کند و فضاپیما شروع به چرخش می کند!
چرا زاویه خمش یک مسیر هذلولی نتایج متفاوتی می دهد؟زاویه خمش (δ) زاویه بازتابی بین دو مجانب یک مسیر هذلولی است.
خط سیر هذلولی برچسب گذاری شده است
، فرمول محاسبه زاویه خمش به صورت زیر است:
$\delta = 2 \sin^{-1}\bigg( \frac{1}{e} \bigg)$
جایی که e خارج از مرکز است و به صورت زیر محاسبه می شود:
$e = \frac{rv_\infty^2}{\mu}+1$
جایی که r فاصله فضاپیما از جسم در طول نزدیکترین نزدیک شدن (پریاپسیس) و $v_\infty$ سرعتی است که گویی جسم گرانشی آنجا نبوده است.
من یک مقدار دلخواه برای $v_\infty$ که 21000 متر بر ثانیه است و ارتفاع دلخواه مدار که 60000 کیلومتر از مرکز سیاره است (که شعاع آن 6371 کیلومتر است) قرار دادم تا مقدار کل$r = 6.6371 \times 10^7$ باشد.GM سیاره نیز ساخته شده است، بنابراین $\mu = 1.47 \times 10^{14}$. این به من e=200.113$ $می دهد. و وقتی e را به معادله 1 جایگزین کنم،$ δ=0.573 $بدست می آید.
من این مسیر هذلولی را روی Desmos ترسیم کردم و در اینجا نمودار برای مرجع است (خطوط نقطه چین مجانبی هستند).
توجه داشته باشید، a = 500، و b = 100055.25 زیرا با استفاده از معادله خروج از مرکز هذلولی $e = \frac{\sqrt{a^2+b^2}}{a}$، خروج از مرکز 200.113 به دست می آید. کاری که من اساساً انجام دادم این بود که یک مقدار دلخواه a را انتخاب کردم و برای b حل کردم تا خروجی 200.113 به دست آید.
سوال: تصویر بالا نشان می دهد که این مسیر هذلولی به وضوح زاویه خمش بسیار بزرگی دارد، در حدود 180 درجه (در واقع کمتر اما در چشم 180 درجه به نظر می رسد). اما فرمول 1 نتیجه $\delta = 0.573$ را داد. این نمی تواند درجه باشد. اما رادیان هم نیست زیرا $0.573 rad = 32^o$. نمی تواند قوس دقیقه یا آرک سکانت باشد. من فکر کردم که بایدتحول باشد. اما یک چرخش بیشتر از 0.5 مقدار درجه ای بیشتر از 180 درجه را ایجاد می کند که زاویه خمش کمتر از آن است. اینجا چه خبره؟ آیا من چیزی را اشتباه متوجه شده ام؟دو موضوع عمده وجود دارد که می توانم ببینم.
هر چیزی که برای محاسبه arcsin استفاده می کنید، در واقع مقداری را بر حسب درجه به شما می دهد.
پارامترهایی که ارائه کردهاید اساساً مربوط به مسابقه ماهوارهای با یک جسم در فاصله متوسط است که در تمام طول مسیر خود بسیار بالاتر از سرعت فرار حرکت میکند. نه به اندازه کافی نزدیک می شود و نه به اندازه کافی در اطراف معلق می ماند تا یک خم مسیر قابل توجه داشته باشد، بنابراین بله، زاویه انحراف تقریباً 0.57 درجه است.
همچنین، مقادیر انتخابی شما برای تولید خروج از مرکز 200 خاموش است. $\frac{\sqrt{500^2 + 4444^2}}{500} = 8.944$
برای گسترش بیشتر، من معمولاً از مقاطع مخروطی قطبی برای مدارها استفاده می کنم. هنگام کار با معادلات کپلر راحت تر می توان با آنها کنار آمد.
شما فاصله پری آپسیس و خروج از مرکز را دارید: (ویرایش: در ابتدا پری آپسی 10 برابر بیش از حد بزرگ بود)
$r_p = 6.67 \times 10^7m$
e=200از آنجا، می توانید نیم محور اصلی a را به صورت زیر محاسبه کنید:$a = \frac{r_p}{1-e} = -3.34 \times 10^5 m$
و معادله قطبی هذلولی حاصل به صورت زیر است:
$r = \frac{a(1-e^2)}{1 + e\cos \theta}= \frac{r_p(1+e)}{1 + e\cos \theta}$
و پرواز شما از دنیایی که انتخاب کرده اید به این صورت است:
اول از همه، مقدار δ شما به وضوح بر حسب درجه است. با خروج از مرکز 200، 1/e متقابل آنقدر کوچک است که تقریباً برابر است با سینوس معکوس خود - بر حسب رادیان. δ اساساً 2/200 رادیان = 0.573 درجه است.
در مرحله بعد، متوجه شوید که از نظر هندسی، خروج از مرکز هذلولی برابر است با تقسیم فاصله مرکز به کانون بر فاصله مرکز به راس. با شکل شما برای هذلولی که دارای رئوس روی محور y است، فاصله اول $\sqrt{a^2+b^2}$ و فاصله دوم b (نه a) است.
برای خروج از مرکزیت بالایی که رندر میدهید، باید یک بزرگتر از b داشته باشید، نه برعکس، و علاوه بر این، نسبت بین آنها باید بسیار بیشتر از 4444/500 باشد که در اینجا در نظر گرفته شده است. وقتی خروج از مرکزیت هذلولی که در بالا توضیح داده شد بیشتر از 10 باشد، عبارت b2 زیر رادیکال بسیار کوچک است، بنابراین خروج از مرکز فقط کمی با a/b متفاوت است. بنابراین، برای خروج از مرکز 200، شما اساساً نیاز دارید که a 200 برابر b باشد، نه نسبت 8.888 که در اینجا داده شده است.
-
rohamavation
نام: roham hesami radرهام حسامی راد
محل اقامت: 100 مایلی شمال لندن جاده آیلستون، لستر، لسترشر. LE2
عضویت : سهشنبه ۱۳۹۹/۸/۲۰ - ۰۸:۳۴
پست: 3286-
سپاس: 5494
- جنسیت:
تماس:
Re: هوافضا
.حرکت چتر نجات در نیروی جاذبه و کشش هوا چگونه اتفاق می افتد؟
1) یک چترباز سقوط آزاد از هواپیما بیرون می پرد و به سمت پایین شتاب می گیرد.
در ابتدا مقاومت هوا یا کشیدن هوا تأثیر کمی بر چترباز دارد.
(مقاومت هوا مستقیماً متناسب با سرعت است و سرعت اولیه نسبتاً پایین غواص در لحظه های اولیه نمی تواند مقاومت هوا را در این مرحله به اندازه کافی قابل توجه کند)
بنابراین در درجه اول گرانش (یعنی وزن میلی گرم) روی چترباز کار می کند و عمل می کند مشخصاً رو به پایین است.
2) همانطور که او در درجه اول تحت تأثیر جاذبه زمین قرار می گیرد (مقاومت هوا کم است) ، سرعت چترباز هر ثانیه از سقوط افزایش می یابد.
3) از آنجا که مقاومت هوا با سرعت سقوط جسم مستقیماً متناسب است ، بنابراین با سقوط او افزایش می یابد. و سرانجام ، در مقطعی ، این نیروی مقاومتی یا کششی برابر با وزن چترباز سقوط می کند و وزن او را متعادل می کند.
4) در این مرحله ، نیروی خالص بر روی چترباز صفر است. از این رو چترباز سرعت خود را متوقف می کند - او با سرعت ثابت می افتد که به عنوان سرعت ترمینال شناخته می شود.
5) باز کردن چتر مساحت را بسیار افزایش می دهد و از این رو مقاومت هوا نیز افزایش می یابد.
اکنون نیروی بسیار بیشتری به سمت بالا وجود دارد. این بدان معناست که مقاومت هوای رو به بالا بیش از وزن رو به پایین چترباز است. نیروهای موجود در چتر دوباره تعادل ندارند.
و نیروی خالص به سمت بالا باعث عقب ماندگی سقوط رو به پایین می شود و چترباز در سقوط خود کند می شود.
6) با کاهش سرعت چترباز که در حال سقوط است ، میزان مقاومت هوا نیز کاهش می یابد. (همانطور که قبلاً گفته شد ، مقاومت هوا مستقیماً با سرعت بدن در حال سقوط متناسب است).
7) و در حالیکه مقاومت هوا با کاهش سرعت چترباز در حال سقوط همچنان ادامه دارد ، در برخی از مواقع ، دوباره برابر با چترباز می شود. بنابراین ، نیروهای موجود در چتر متعادل هستند یا نیروی خالص صفر است ، بنابراین دوباره شتاب ندارید.
 و چترباز (یا چترباز) به سرعت پایانی ثابت می رسد. این دومین سرعت ترمینال است (لطفاً به این نکته توجه داشته باشید)
و چترباز (یا چترباز) به سرعت پایانی ثابت می رسد. این دومین سرعت ترمینال است (لطفاً به این نکته توجه داشته باشید)
هدف این است که به سرعت ترمینال جدیدتر و آهسته تری از 10 متر بر ثانیه برسید که با آن سرعت بتواند با خیال راحت به زمین بنشیند. با این سرعت نهایی سرانجام فرد فرود می آید. به عنوان مثال ، با سقوط کاربر در آسمان ، شتاب ثابت گرانش بیشتر از مقاومت هوا است که سعی در کاهش سرعت کاربر دارد. هنگامی که چتر آنها مستقر شد ، به دلیل ایجاد سطح ایجاد شده توسط چتر ، مقدار مقاومت هوا به شدت افزایش می یابد و باعث می شود کاربر به آرامی به زمین سقوط کند. این منجر به استقرار موفقیت آمیز چتر و فرود ایمن کاربر میشودقبل از شروع ساخت چتر ، باید بفهمیم که باید چقدر بزرگ باشد. به طور خاص ، ما باید محاسبه کنیم که چتر به چه سطح سطح نیاز دارد تا بتواند شرایط را برآورده کند.
منطق نشان می دهد که هرچه چتر بزرگتر باشد سرعت نزول جسم کندتر است. بعداً این اصل با برخی معادلات اساسی نشان داده شده است.
اگرچه سرعت پایین آمدن برای CanSat (كنست (cansat)؛ شبه ماهوارهای در ابعاد يك قوطی) بسیار سودمند است ، اما محدودیتی برای اطمینان از فرود CanSat در نزدیکی منطقه پرتاب تعیین شده است. اگر سرعت نزول بیش از حد کند باشد ، CanSat ممکن است کیلومترها همراه با باد دور شود ، که نه مجاز است و نه مطلوب. به دلایل ایمنی نیز حداکثر میزان نزول تعیین شده است.
. ما برای تخمین مساحت چتر از یک مدل ساده استفاده می کنیم و پس از آن می توانیم ساخت را شروع کنیم.
در هنگام نزول ، دو نیرو بر روی CanSat عمل می کنند ، همانطور که در شکل سمت راست نشان داده شده است. نیروی جاذبه روی قوطی را کشیده و آن را به سمت زمین تسریع می کند و نیروی کشش روی چتر در جهت مخالف بر روی CanSat عمل کرده و سرعت نزول را کاهش می دهد. این دو نیرو در شکل سمت راست نشان داده شده اند.
وقتی CanSat مستقر شود ، نیروی جاذبه باعث تسریع آن می شود. نیروی کشیدن به سرعت CanSat بستگی دارد و وقتی سرعت کم است ، نیروی کشش از نیروی جاذبه کوچکتر است. وقتی سرعت رشد می کند ، نیروی کشش بیشتر می شود و پس از چند ثانیه نیروی کشش از چتر با نیروی جاذبه به تعادل می رسد. از آن نقطه به بعد ، شتاب صفر خواهد شد و CanSat با سرعت ثابت پایین می آید. این سرعت ثابت باید بزرگتر از حداقل سرعت نزول مشخص شده در الزامات باشد. برای محاسبات زیر می توانیم از این حداقل مقدار به عنوان سرعت ثابت CanSat استفاده کنیم.
نیروی جاذبه F_g برابر است با: $F_g = m \cdot g
$.,g: شتاب جاذبه ، برابر با $ 9.81m/sec^2$
نیروی کشیدن F_D چتر برابر است با:$F_D = 0.5 \cdot C_D \cdot \rho \cdot A \cdot V^2 $
من باید یک مدل را برای یک مرد بنویسم که از هواپیما در ارتفاع h بالاتر از زمین با چتر پرواز می کند و دارای یک هواپیمای سرعت است. من به بسیاری از مدل ها به صورت آنلاین نگاهی انداخته ام و همه آنها می گویند $F=ma=-kv-mg$ جایی که k مقاومت هوا قبل از استقرار چتر است ، v سرعت است ، m جرم انسان است و g شتاب است. با این حال ، من فکر می کنم که مسیر نیز باید در سه بعد باشد ، یعنی $F=(F_x,F_y,F_z)$زیرا با پرش از هواپیما ، مرد باید یک سرعت اولیه داشته باشد که از خم شدن به هواپیما خارج می شود ، و بنابراین همچنین باید در آن جهت مقاومت هوایی داشته باشد.بعلاوه ، من نمی فهمم که چرا$ma=-kv-mg$ ، منظور من این است که این دو نیرو باید با یکدیگر مخالفت کنند؟ مقاومت هوا در مقایسه با شتاب ناشی از گرانش باید در جهت مخالف باشد.
مکانیک نیوتنی مقاومت هوا در مقایسه با شتاب ناشی از گرانش باید در جهت مخالف باشد. واقعاً امیدوارم که بتوانید در این زمینه به من کمک کنید!
نه. نیروی کشش به سادگی در جهت مخالف بردار سرعت قرار می گیرد.
اکنون مدل ساده شده زیر را در نظر بگیرید:رض کنید هواپیمای در حال افقی به صورت افقی و موازی با محور x در حال پرواز با سرعت v0 باشد ، سپس در نقطه افت (t = 0) چتر نجات دارای دو بردار سرعت با مقیاس کشان است$v_x=v_0$و$v_y=0$و$ma=mg-\frac12 \rho C_{y,1}A_{y,1}v_{y}^2$و $\frac12 \rho C_{y,1}A_{y,1}=\alpha_1$و $\large{v_y(t)=\sqrt{\frac{mg}{\alpha_1}\big(1-e^{-\frac{2\alpha_1t}{m}}\big)}}$و $\large{v_y(t)=\sqrt{\frac{1}{\alpha2}\big(mg-\big(mg-\alpha_2v_{y,\tau}^2)e^{-\frac{2\alpha_2t}{m}}\big)}}$فرض کنید که ناودانی در t = τ باز شود ، سپس برای t> τ نیز می توان استخراج کرد$\large{v_{y,\tau}=\sqrt{\frac{mg}{\alpha_1}\big(1-e^{-\frac{2\alpha_1\tau}{m}}\big)}}$چتر نیز در جهت x کشیده می شود. قبل از استقرار ناودان (و با فرض نداشتن باد جانبی):$ma=-\frac12 \rho C_{x,1}A_{x,1}v_{x}^2$یا $a=-\alpha_3v_x^2$و $\frac12 \rho C_{x,1}A_{x,1}=\alpha_3$و $v_x(t)=\frac{v_0}{1+v_0\alpha_3t}$و And for t>τ:
$v_x(t)=\frac{v_{x,\tau}}{1+v_{x,\tau}\alpha_4t}$اینجا $v_x(t)=\frac{v_{x,\tau}}{1+v_{x,\tau}\alpha_4t}$
مدل چتر نجات$F_y=-mg-kv_y=ma_y$ و $F_x=-kv_x=ma_x$ حداکثر. سپس فقط با در نظر گرفتن 1) معادله سرعت را پیدا می کنیم (t = 0 ، v = o و y = h شرایط اولیه هستند):
$\begin{equation}
\frac{dy}{dt}+\frac{k}{m}y=-gt+\frac{k}{m}h
\end{equation}$
سپس می توانیم دوباره ادغام شویم (شرایط اولیه ، t = 0 و y = h دوباره):
$\begin{equation}
y=-g\frac{m}{k}t+g\frac{m^2}{k^2}h-g\frac{m^2}{k^2}e^{-\frac{k}{m}t}
\end{equation}$
آیا تا زمانی که چتر را باز نکنیم این درست است؟ و هنگامی که ما چتر را باز می کنیم و با توجه به اینکه زمان باز شدن$\tau$ طول می کشد و ضریب کشش به صورت خطی افزایش می یابد (به عنوان مثال $k(t)=k+k_p\frac{t}{\tau}$چه اتفاقی می افتد؟در مورد مدلسازی بازه زمانی که چتر با استفاده از یک مدل ساده برای ضریب درگ مستقر میشود$k(t)=k+k_p\frac{t}{\tau}$و $m\frac{dv}{dt}+(k+k_p\frac{t}{\tau})v=mg$لذا $v(t)=\frac{mg}{k}\big(1-e^{-\frac{kt}{m}}\big)$با داشتن $a=k_p/\tau$با در نظر داشتن این مسئله هنوز هم باید یکپارچه شود تا جابجایی حاصل شود ، که غیر قابل اجرا می شود.من یک روش دیگر برای مدل سازی استقرار ناودان پیشنهاد می کنم ، $ma=mg-kv$و$m\frac{dv}{dt}=mg-kv$و$m\frac{dv}{mg-kv}=dt$و$-\frac{m}{k}\frac{d(mg-kv)}{mg-kv}=dt$و $v(t)=\frac{mg}{k}\big(1-e^{-\frac{kt}{m}}\big)$نکت هتوجه داشته باشید که برای $t \to \inf$ ، $v \to \frac{mg}{k}$ ، سرعت انتهایی استپس $y(t)=\int_0^t v(t)dt$و $y(t)=\frac{mg}{k} \int_0^t dt \big(1-e^{-\frac{kt}{m}}\big)$پس $y(t)=\frac{mg}{k}t-\frac{m^2g}{k^2}\big(1-e^{-\frac{kt}{m}}\big)$در اینجا $y(t)$ مسافت طی شده از نقطه افت است. برای بازگشت به تعریف y از ارتفاع بالای زمین$\text{Height}=h-y(t)$که $\frac{dy}{dt}+\frac{k}{m}y=-gt+\frac{k}{m}h$میرسم در واقع $m\frac{d^2y}{dt^2}=-mg-k\frac{dy}{dt}$
تعیین قطر چتر برای بدست آوردن سرعت فرود خاص یک بدن ، با معادلات دیفرانسیل$A_{chute} = \pi \frac{D^2}{4}$و $m \frac{dv}{dt} = \frac{1}{2} \rho_{air} \space C_d A \space v^2$
ابتدا سرعت فرود را تعیین کنید. بعد مساحت چتر را محاسبه کنید با استفاده از منطقه ای که نیروی کشش را محاسبه می کنیم (به صورت خطی بستگی دارد) با استفاده از نیروی کشش زمانی را به دست می آورید که در آن می توانید سرعت دلخواه را بدست آورید. از این زمان به لحظه (یا ارتفاعی که در آن هستید) خواهید رسید که باید چتر را باز کنید.الزامات تعیین شده توسط انجمن چترهای ایالات متحده می گوید که چتر اصلی برای دارنده مجوز D در 2000 فوت بالاتر از سطح زمین مستقر می شود. این زمان کافی را برای غواص فراهم می کند تا نقص عملکرد را برطرف کند. بیشتر چترهای اصلی 600 تا 1200 فوت سقوط آزاد دارند تا باز شوند. چتر ذخیره می تواند در کمتر از 400 فوت باز شود. حداقل حداکثر ذخیره حدود 700 فوت برای فرود بدون آسیب دیدگی خواهد بود.درضمن از کاربردهای ان در ترمز هواپیما این یک چتر است که به جت ها و سایر وسایل نقلیه با سرعت بالا کمک می کند تا ترمز کرده و فاصله ترمز را کوتاه کنند. برای جت ها ، این بدان معنی است که یک نوار فرود کوتاه تر کافی است. در مقاله خبری شما ، چتر ناکارآمد باعث خروج جت از باند فرودگاه شد ، احتمالاً به این دلیل که قبل از رسیدن به انتهای آن نتوانست با سرعت کافی متوقف شود و منجر به حادثه شود.با بهبود ترمزها و رانش معکوس ، چترها دیگر گزینه ای برای شرکت های هواپیمایی نیستند. امروزه ترمزهای کربنی بهترین ترمز در بازار حمل و نقل هوایی هستند ، همراه با ترمزهای اتوماتیک ، دنده عقب و ترمزهای سرعت ، اکثر هواپیماهای نسل جدید در مقایسه با نسل های قدیمی بسیار کوتاه تر فرود می آیند ، پرواز رد تقریباً خودکار است و با محاسبه صحیح تصادفات بیش از حد باند فرودگاه بطور قابل توجهی کاهش می یابد. از آنجا که اثربخشی معکوس های رانش در سرعت بالا بهتر است ، اکثر شرکت های هواپیمایی از رانش معکوس معکوس در حالت بیکار استفاده می کنند ، در صورت استفاده از معکوس های غیرفعال ، به خلبانان پیشنهاد می شود تا تا 80 گره یا 60 کیلو پس از فرود رانش معکوس را اعمال کنند ، خودکار ترمزهای ترکیبی با ترمزهای کربنی و ترمز سرعت ، فاصله توقف کمتری نسبت به قبل به هواپیما می دهند. دمای ترمز در ترمزهای کربنی بسیار بهتر است ، در صورت عدم پذیرش ، دمای گرم همچنان مشکل ساز است اما برای تاکسی های طولانی دیگر مشکلی نیست. بنابراین چترها در هواپیمایی بازنشسته می شوند. . ؛و برای جنبه فنی در حال حاضر. از آنجا که هواپیماهای جت با سرعت بسیار بالایی به زمین می نشینند ، آنها نمی توانند فقط با ترمزهای فیزیکی که اصطکاک را روی چرخ ها ایجاد می کنند ، متوقف شوند ، بنابراین آنها دارای چترهایی هستند که از قسمت عقب هواپیمای جت مستقر می شوند. چترها جت ها را کند کرده و به توقف هواپیما کمک می کنند. از آنجا که از چترها برای ترمزگیری هواپیما استفاده می شود ، به آنها چترهای ترمز گفته می شود.
بنابراین ، از آنجا که چترها نمی توانند بشکنند ، بلکه فقط پاره می شوند ، و از آنجا که هواپیماهای پرسرعت مانند جت های نظامی از چترها برای کمک به آنها در توقف پس از فرود استفاده می کنند ، منطقی است که نتیجه بگیریم آنها در مورد چترهای ترمز صحبت می کنند هواپیما را متوقف کنید
انواع چترنجات :
1. مخروطی ( conical )-2. هرمی ( pyramid )-3. گرد ( round )-دو نوع چتر گرد وجود دارد ، اولی غیر قابل هدایت ( non-steerable ) که بر اساس سرخوردن در جهت وزش باد می باشد و دومی قابل هدایت ( steerable ) که دارای حفره های بزرگ و برش در لبه ها بوده که اجازه مانور را به آن می دهد.-4. مربعی ( square )-این نوع چترهای نجات دارای سرعت مناسب در باز شدن، پایداری مناسب در هنگام باز شدن و نرخ نزول خوبی است-5. مثلثی (rogallo) این نوع چتر ها قابلیت گلاید و هدایت شوندگی دارند.
6. Ram-Air چترهای Ram-Air خودکار و مشابه پاراگلادیرها هستند که قابلیت های جهت و سرعت و کنترل بیشتر و بهتر در آنها ارائه شده است.
*چترهای کمکی باید قادر به تحمل شوک وارده تا 40 متر بر ثانیه( 144 کیلومتر بر ساعت) داشته باشد
*یک چتر کمکی باید با فشاری کمتر از 7 کیلوگرم بر ثانیه ازمحل خود بیرون بیاید
*در بالاترین وزن بیشترین sink کمکی 5.5 متر بر ثانیه می باشد
محل های اصلی قرار گرفتن چتر کمکی در صندلی خلبانان پاراگلایدر:
1.کمکی جلو( وصل به کارابین های صندلی خلبان)
*خلبان دید مناسبی بر روی آن دارد.
*با هر دو دست می توان کمکی را کشید.
*به هر دو طرف می توان پرت کرد.
*مقداری دست و پا گیر و مزاحم در هنگام تیک آف و فرود.
2.کمکی(بغل، زیر، پشت) و وصل به پشت صندلی خلبان
* مزاحمتی در حین تیک آف و فرود برای خلبان ایجاد نمی کند
*خلبان با توجه به چپ دست یا راست دست بودن محل قرار گرفتن دستگیره کمکی را انتخاب می کند
*در هنگام کشیده شدن خلبان را به حالت ایستاده در می آورد
* در هنگام نیاز به استفاده نیاز به دقت بیشتری جهت پیدا کردن دستگیره کمکی می باشد.
مراحل کشیدن کمکی
( نگاه کن – بگیر – بکش )
1. نگاه کردن و پیدا کردن دستگیره کمکی
2. کشیدن و با قدرت پرت کردن
3.اطمینان از باز شدن کامل و صحیح چتر کمکی
4. جمع کردن بال اصلی
*بعد از کشیدن چتر کمکی با استفاده از برک ها حتما بال پاراگلایدر خود را از پرواز خارج و جمع کنید
توجه کنید عبارت كنست از 2 قسمت CAN به معني قوطي (قوطي نوشابه) و SAT (مخفف Satellite به معني ماهواره) تشكيل ميشود
CanSat شبیه سازی یک ماهواره واقعی است که در حجم و شکل قوطی نوشابه قرار دارد. چالش دانشجویان این است که تمام زیر سیستم های اصلی موجود در ماهواره مانند برق ، سنسورها و یک سیستم ارتباطی را در این کمترین حجم قرار دهند.
سپس CanSat توسط یک موشک تا ارتفاع حدود یک کیلومتری پرتاب می شود یا از سکو یا بالون به پایین پرتاب می شود. سپس ماموریت آن آغاز می شود. این شامل انجام یک آزمایش علمی ، دستیابی به فرود ایمن و تجزیه و تحلیل داده های جمع آوری شده است.
CanSats فرصتی بی نظیر را برای دانشجویان فراهم می کند تا اولین تجربه عملی یک پروژه فضایی واقعی را داشته باشند. آنها مسئول همه جنبه ها هستند: حسگرها و ارسال آن به ایستگاه پایه واقع در
تیم من باید یک CanSat بسازد و برای انجام یک مأموریت اجباری اولیه و مأموریت ثانویه آن را برنامه ریزی کند.
مأموریت اصلی شامل اندازه گیری پارامترهای زیر و انتقال داده های زیر به عنوان تله متری به ایستگاه زمینی حداقل یک ثانیه است:
· دمای هوا - سنسور دما و فشار
· فشار هوا - سنسور دما و فشار
ماموریت ثانویه CanSat باید توسط تیم انتخاب شود. ما در مورد موارد زیر تصمیم گرفتیم:
· فرود هدفمند با استفاده از پارافویل - استفاده از موتورهای سرو برای فرمان
· فعالیت فتوسنتز را با فیلتر مخصوص دوربین اندازه گیری کنید -
· جمع آوری اطلاعات GPS (همچنین برای فرود هدفمند نیز مفید است)
تمام داده ها با استفاده از گیرنده منتقل می شوند.
سخت افزار و ماموریت های CanSat باید مطابق با الزامات و محدودیت های زیر طراحی شوند:
تمام اجزای CanSat باید در یک قوطی نوشابه استاندارد قرار بگیرند (ارتفاع 115 میلی متر و قطر 66 میلی متر) ، به استثنای چتر نجات. آنتن های رادیویی و آنتن های GPS بسته به نوع طراحی ، می توانند به صورت خارجی (در بالا یا پایین قوطی ، اما نه در کناره ها) نصب شوند.
NB ناحیه بار موشک به ازای هر CanSat موجود ، در امتداد بعد محوری قوطی (یعنی ارتفاع) ، 4.5 سانتی متر فضا دارد که باید تمام عناصر خارجی را شامل شود: چتر ، سخت افزار اتصال چتر و هر آنتن.
آنتن ها ، مبدل ها و سایر عناصر CanSat نمی توانند فراتر از قطر قوطی باشند تا زمانی که وسیله پرتاب را ترک کند.
جرم CanSat باید بین 300 تا 350 گرم باشد. CanSats که سبک تر است باید بالاست اضافی را با خود ببرد تا به حداقل 300 گرم جرم مورد نیاز برسد.
مواد منفجره ، چاشنی ، مواد شیمیایی و مواد قابل اشتعال یا خطرناک اکیداً ممنوع است. تمام مواد استفاده شده باید برای پرسنل ، تجهیزات و محیط زیست ایمن باشد. در صورت تردید ، داده های ایمنی مواد (MSDS) درخواست می شود.
CanSat باید توسط باتری و / یا صفحات خورشیدی تأمین شود. برای چهار ساعت مداوم باید سیستم ها روشن شوند.
در صورت نیاز به تعویض / شارژ باتری باید به راحتی در دسترس باشد.
CanSat باید دارای یک سوئیچ قدرت اصلی باشد که به راحتی قابل دسترسی باشد.
گنجاندن سیستم بازیابی (بوق ، چراغ رادیویی ، GPS و غیره) توصیه می شود.
CanSat باید یک سیستم بازیابی ، مانند چتر داشته باشد که پس از پرتاب قابل استفاده مجدد باشد. توصیه می شود از پارچه ای با رنگ روشن استفاده کنید که باعث بهبود CanSat پس از فرود می شود.
اتصال چتر باید تا 1000 N نیرو تحمل کند. برای اطمینان از عملکرد اسمی سیستم باید قدرت چتر را آزمایش کرد.
به دلایل بهبودی ، حداکثر زمان پرواز 120 ثانیه توصیه می شود. در صورت تلاش برای فرود مستقیم ، حداکثر 170 ثانیه زمان پرواز توصیه می شود.
به دلایل بهبودی سرعت نزول بین 8 تا 11 متر بر ثانیه توصیه می شود. در صورت فرود مستقیم ، میزان نزولی کمتری از 6m / s توصیه می شود.
CanSat باید بتواند شتاب حداکثر 20 گرم را تحمل کند.
بودجه کل مدل نهایی CanSat نباید بیش از 500 یورو باشد. ایستگاه های زمینی (GS) و هر مورد مربوط به غیر پرواز در بودجه در نظر گرفته نمی شود. در بخش بعدی اطلاعات بیشتر در مورد مجازات ها در صورتی که تیم ها بیش از بودجه اعلام شده داشته باشند ، می توانید پیدا کنید.
در صورت حمایت مالی ، کلیه موارد به دست آمده باید در بودجه با هزینه های متناظر واقعی در بازار مشخص شود.
CanSat باید پس از ورود به کمپین پرتاب آماده پرواز باشد. قبل از راه اندازی ، معاینه فنی نهایی CanSats توسط پرسنل مجاز انجام می شود.
1) یک چترباز سقوط آزاد از هواپیما بیرون می پرد و به سمت پایین شتاب می گیرد.
در ابتدا مقاومت هوا یا کشیدن هوا تأثیر کمی بر چترباز دارد.
(مقاومت هوا مستقیماً متناسب با سرعت است و سرعت اولیه نسبتاً پایین غواص در لحظه های اولیه نمی تواند مقاومت هوا را در این مرحله به اندازه کافی قابل توجه کند)
بنابراین در درجه اول گرانش (یعنی وزن میلی گرم) روی چترباز کار می کند و عمل می کند مشخصاً رو به پایین است.
2) همانطور که او در درجه اول تحت تأثیر جاذبه زمین قرار می گیرد (مقاومت هوا کم است) ، سرعت چترباز هر ثانیه از سقوط افزایش می یابد.
3) از آنجا که مقاومت هوا با سرعت سقوط جسم مستقیماً متناسب است ، بنابراین با سقوط او افزایش می یابد. و سرانجام ، در مقطعی ، این نیروی مقاومتی یا کششی برابر با وزن چترباز سقوط می کند و وزن او را متعادل می کند.
4) در این مرحله ، نیروی خالص بر روی چترباز صفر است. از این رو چترباز سرعت خود را متوقف می کند - او با سرعت ثابت می افتد که به عنوان سرعت ترمینال شناخته می شود.
5) باز کردن چتر مساحت را بسیار افزایش می دهد و از این رو مقاومت هوا نیز افزایش می یابد.
اکنون نیروی بسیار بیشتری به سمت بالا وجود دارد. این بدان معناست که مقاومت هوای رو به بالا بیش از وزن رو به پایین چترباز است. نیروهای موجود در چتر دوباره تعادل ندارند.
و نیروی خالص به سمت بالا باعث عقب ماندگی سقوط رو به پایین می شود و چترباز در سقوط خود کند می شود.
6) با کاهش سرعت چترباز که در حال سقوط است ، میزان مقاومت هوا نیز کاهش می یابد. (همانطور که قبلاً گفته شد ، مقاومت هوا مستقیماً با سرعت بدن در حال سقوط متناسب است).
7) و در حالیکه مقاومت هوا با کاهش سرعت چترباز در حال سقوط همچنان ادامه دارد ، در برخی از مواقع ، دوباره برابر با چترباز می شود. بنابراین ، نیروهای موجود در چتر متعادل هستند یا نیروی خالص صفر است ، بنابراین دوباره شتاب ندارید.
هدف این است که به سرعت ترمینال جدیدتر و آهسته تری از 10 متر بر ثانیه برسید که با آن سرعت بتواند با خیال راحت به زمین بنشیند. با این سرعت نهایی سرانجام فرد فرود می آید. به عنوان مثال ، با سقوط کاربر در آسمان ، شتاب ثابت گرانش بیشتر از مقاومت هوا است که سعی در کاهش سرعت کاربر دارد. هنگامی که چتر آنها مستقر شد ، به دلیل ایجاد سطح ایجاد شده توسط چتر ، مقدار مقاومت هوا به شدت افزایش می یابد و باعث می شود کاربر به آرامی به زمین سقوط کند. این منجر به استقرار موفقیت آمیز چتر و فرود ایمن کاربر میشودقبل از شروع ساخت چتر ، باید بفهمیم که باید چقدر بزرگ باشد. به طور خاص ، ما باید محاسبه کنیم که چتر به چه سطح سطح نیاز دارد تا بتواند شرایط را برآورده کند.
منطق نشان می دهد که هرچه چتر بزرگتر باشد سرعت نزول جسم کندتر است. بعداً این اصل با برخی معادلات اساسی نشان داده شده است.
اگرچه سرعت پایین آمدن برای CanSat (كنست (cansat)؛ شبه ماهوارهای در ابعاد يك قوطی) بسیار سودمند است ، اما محدودیتی برای اطمینان از فرود CanSat در نزدیکی منطقه پرتاب تعیین شده است. اگر سرعت نزول بیش از حد کند باشد ، CanSat ممکن است کیلومترها همراه با باد دور شود ، که نه مجاز است و نه مطلوب. به دلایل ایمنی نیز حداکثر میزان نزول تعیین شده است.
. ما برای تخمین مساحت چتر از یک مدل ساده استفاده می کنیم و پس از آن می توانیم ساخت را شروع کنیم.
در هنگام نزول ، دو نیرو بر روی CanSat عمل می کنند ، همانطور که در شکل سمت راست نشان داده شده است. نیروی جاذبه روی قوطی را کشیده و آن را به سمت زمین تسریع می کند و نیروی کشش روی چتر در جهت مخالف بر روی CanSat عمل کرده و سرعت نزول را کاهش می دهد. این دو نیرو در شکل سمت راست نشان داده شده اند.
وقتی CanSat مستقر شود ، نیروی جاذبه باعث تسریع آن می شود. نیروی کشیدن به سرعت CanSat بستگی دارد و وقتی سرعت کم است ، نیروی کشش از نیروی جاذبه کوچکتر است. وقتی سرعت رشد می کند ، نیروی کشش بیشتر می شود و پس از چند ثانیه نیروی کشش از چتر با نیروی جاذبه به تعادل می رسد. از آن نقطه به بعد ، شتاب صفر خواهد شد و CanSat با سرعت ثابت پایین می آید. این سرعت ثابت باید بزرگتر از حداقل سرعت نزول مشخص شده در الزامات باشد. برای محاسبات زیر می توانیم از این حداقل مقدار به عنوان سرعت ثابت CanSat استفاده کنیم.
نیروی جاذبه F_g برابر است با: $F_g = m \cdot g
$.,g: شتاب جاذبه ، برابر با $ 9.81m/sec^2$
نیروی کشیدن F_D چتر برابر است با:$F_D = 0.5 \cdot C_D \cdot \rho \cdot A \cdot V^2 $
من باید یک مدل را برای یک مرد بنویسم که از هواپیما در ارتفاع h بالاتر از زمین با چتر پرواز می کند و دارای یک هواپیمای سرعت است. من به بسیاری از مدل ها به صورت آنلاین نگاهی انداخته ام و همه آنها می گویند $F=ma=-kv-mg$ جایی که k مقاومت هوا قبل از استقرار چتر است ، v سرعت است ، m جرم انسان است و g شتاب است. با این حال ، من فکر می کنم که مسیر نیز باید در سه بعد باشد ، یعنی $F=(F_x,F_y,F_z)$زیرا با پرش از هواپیما ، مرد باید یک سرعت اولیه داشته باشد که از خم شدن به هواپیما خارج می شود ، و بنابراین همچنین باید در آن جهت مقاومت هوایی داشته باشد.بعلاوه ، من نمی فهمم که چرا$ma=-kv-mg$ ، منظور من این است که این دو نیرو باید با یکدیگر مخالفت کنند؟ مقاومت هوا در مقایسه با شتاب ناشی از گرانش باید در جهت مخالف باشد.
مکانیک نیوتنی مقاومت هوا در مقایسه با شتاب ناشی از گرانش باید در جهت مخالف باشد. واقعاً امیدوارم که بتوانید در این زمینه به من کمک کنید!
نه. نیروی کشش به سادگی در جهت مخالف بردار سرعت قرار می گیرد.
اکنون مدل ساده شده زیر را در نظر بگیرید:رض کنید هواپیمای در حال افقی به صورت افقی و موازی با محور x در حال پرواز با سرعت v0 باشد ، سپس در نقطه افت (t = 0) چتر نجات دارای دو بردار سرعت با مقیاس کشان است$v_x=v_0$و$v_y=0$و$ma=mg-\frac12 \rho C_{y,1}A_{y,1}v_{y}^2$و $\frac12 \rho C_{y,1}A_{y,1}=\alpha_1$و $\large{v_y(t)=\sqrt{\frac{mg}{\alpha_1}\big(1-e^{-\frac{2\alpha_1t}{m}}\big)}}$و $\large{v_y(t)=\sqrt{\frac{1}{\alpha2}\big(mg-\big(mg-\alpha_2v_{y,\tau}^2)e^{-\frac{2\alpha_2t}{m}}\big)}}$فرض کنید که ناودانی در t = τ باز شود ، سپس برای t> τ نیز می توان استخراج کرد$\large{v_{y,\tau}=\sqrt{\frac{mg}{\alpha_1}\big(1-e^{-\frac{2\alpha_1\tau}{m}}\big)}}$چتر نیز در جهت x کشیده می شود. قبل از استقرار ناودان (و با فرض نداشتن باد جانبی):$ma=-\frac12 \rho C_{x,1}A_{x,1}v_{x}^2$یا $a=-\alpha_3v_x^2$و $\frac12 \rho C_{x,1}A_{x,1}=\alpha_3$و $v_x(t)=\frac{v_0}{1+v_0\alpha_3t}$و And for t>τ:
$v_x(t)=\frac{v_{x,\tau}}{1+v_{x,\tau}\alpha_4t}$اینجا $v_x(t)=\frac{v_{x,\tau}}{1+v_{x,\tau}\alpha_4t}$
مدل چتر نجات$F_y=-mg-kv_y=ma_y$ و $F_x=-kv_x=ma_x$ حداکثر. سپس فقط با در نظر گرفتن 1) معادله سرعت را پیدا می کنیم (t = 0 ، v = o و y = h شرایط اولیه هستند):
$\begin{equation}
\frac{dy}{dt}+\frac{k}{m}y=-gt+\frac{k}{m}h
\end{equation}$
سپس می توانیم دوباره ادغام شویم (شرایط اولیه ، t = 0 و y = h دوباره):
$\begin{equation}
y=-g\frac{m}{k}t+g\frac{m^2}{k^2}h-g\frac{m^2}{k^2}e^{-\frac{k}{m}t}
\end{equation}$
آیا تا زمانی که چتر را باز نکنیم این درست است؟ و هنگامی که ما چتر را باز می کنیم و با توجه به اینکه زمان باز شدن$\tau$ طول می کشد و ضریب کشش به صورت خطی افزایش می یابد (به عنوان مثال $k(t)=k+k_p\frac{t}{\tau}$چه اتفاقی می افتد؟در مورد مدلسازی بازه زمانی که چتر با استفاده از یک مدل ساده برای ضریب درگ مستقر میشود$k(t)=k+k_p\frac{t}{\tau}$و $m\frac{dv}{dt}+(k+k_p\frac{t}{\tau})v=mg$لذا $v(t)=\frac{mg}{k}\big(1-e^{-\frac{kt}{m}}\big)$با داشتن $a=k_p/\tau$با در نظر داشتن این مسئله هنوز هم باید یکپارچه شود تا جابجایی حاصل شود ، که غیر قابل اجرا می شود.من یک روش دیگر برای مدل سازی استقرار ناودان پیشنهاد می کنم ، $ma=mg-kv$و$m\frac{dv}{dt}=mg-kv$و$m\frac{dv}{mg-kv}=dt$و$-\frac{m}{k}\frac{d(mg-kv)}{mg-kv}=dt$و $v(t)=\frac{mg}{k}\big(1-e^{-\frac{kt}{m}}\big)$نکت هتوجه داشته باشید که برای $t \to \inf$ ، $v \to \frac{mg}{k}$ ، سرعت انتهایی استپس $y(t)=\int_0^t v(t)dt$و $y(t)=\frac{mg}{k} \int_0^t dt \big(1-e^{-\frac{kt}{m}}\big)$پس $y(t)=\frac{mg}{k}t-\frac{m^2g}{k^2}\big(1-e^{-\frac{kt}{m}}\big)$در اینجا $y(t)$ مسافت طی شده از نقطه افت است. برای بازگشت به تعریف y از ارتفاع بالای زمین$\text{Height}=h-y(t)$که $\frac{dy}{dt}+\frac{k}{m}y=-gt+\frac{k}{m}h$میرسم در واقع $m\frac{d^2y}{dt^2}=-mg-k\frac{dy}{dt}$
تعیین قطر چتر برای بدست آوردن سرعت فرود خاص یک بدن ، با معادلات دیفرانسیل$A_{chute} = \pi \frac{D^2}{4}$و $m \frac{dv}{dt} = \frac{1}{2} \rho_{air} \space C_d A \space v^2$
ابتدا سرعت فرود را تعیین کنید. بعد مساحت چتر را محاسبه کنید با استفاده از منطقه ای که نیروی کشش را محاسبه می کنیم (به صورت خطی بستگی دارد) با استفاده از نیروی کشش زمانی را به دست می آورید که در آن می توانید سرعت دلخواه را بدست آورید. از این زمان به لحظه (یا ارتفاعی که در آن هستید) خواهید رسید که باید چتر را باز کنید.الزامات تعیین شده توسط انجمن چترهای ایالات متحده می گوید که چتر اصلی برای دارنده مجوز D در 2000 فوت بالاتر از سطح زمین مستقر می شود. این زمان کافی را برای غواص فراهم می کند تا نقص عملکرد را برطرف کند. بیشتر چترهای اصلی 600 تا 1200 فوت سقوط آزاد دارند تا باز شوند. چتر ذخیره می تواند در کمتر از 400 فوت باز شود. حداقل حداکثر ذخیره حدود 700 فوت برای فرود بدون آسیب دیدگی خواهد بود.درضمن از کاربردهای ان در ترمز هواپیما این یک چتر است که به جت ها و سایر وسایل نقلیه با سرعت بالا کمک می کند تا ترمز کرده و فاصله ترمز را کوتاه کنند. برای جت ها ، این بدان معنی است که یک نوار فرود کوتاه تر کافی است. در مقاله خبری شما ، چتر ناکارآمد باعث خروج جت از باند فرودگاه شد ، احتمالاً به این دلیل که قبل از رسیدن به انتهای آن نتوانست با سرعت کافی متوقف شود و منجر به حادثه شود.با بهبود ترمزها و رانش معکوس ، چترها دیگر گزینه ای برای شرکت های هواپیمایی نیستند. امروزه ترمزهای کربنی بهترین ترمز در بازار حمل و نقل هوایی هستند ، همراه با ترمزهای اتوماتیک ، دنده عقب و ترمزهای سرعت ، اکثر هواپیماهای نسل جدید در مقایسه با نسل های قدیمی بسیار کوتاه تر فرود می آیند ، پرواز رد تقریباً خودکار است و با محاسبه صحیح تصادفات بیش از حد باند فرودگاه بطور قابل توجهی کاهش می یابد. از آنجا که اثربخشی معکوس های رانش در سرعت بالا بهتر است ، اکثر شرکت های هواپیمایی از رانش معکوس معکوس در حالت بیکار استفاده می کنند ، در صورت استفاده از معکوس های غیرفعال ، به خلبانان پیشنهاد می شود تا تا 80 گره یا 60 کیلو پس از فرود رانش معکوس را اعمال کنند ، خودکار ترمزهای ترکیبی با ترمزهای کربنی و ترمز سرعت ، فاصله توقف کمتری نسبت به قبل به هواپیما می دهند. دمای ترمز در ترمزهای کربنی بسیار بهتر است ، در صورت عدم پذیرش ، دمای گرم همچنان مشکل ساز است اما برای تاکسی های طولانی دیگر مشکلی نیست. بنابراین چترها در هواپیمایی بازنشسته می شوند. . ؛و برای جنبه فنی در حال حاضر. از آنجا که هواپیماهای جت با سرعت بسیار بالایی به زمین می نشینند ، آنها نمی توانند فقط با ترمزهای فیزیکی که اصطکاک را روی چرخ ها ایجاد می کنند ، متوقف شوند ، بنابراین آنها دارای چترهایی هستند که از قسمت عقب هواپیمای جت مستقر می شوند. چترها جت ها را کند کرده و به توقف هواپیما کمک می کنند. از آنجا که از چترها برای ترمزگیری هواپیما استفاده می شود ، به آنها چترهای ترمز گفته می شود.
بنابراین ، از آنجا که چترها نمی توانند بشکنند ، بلکه فقط پاره می شوند ، و از آنجا که هواپیماهای پرسرعت مانند جت های نظامی از چترها برای کمک به آنها در توقف پس از فرود استفاده می کنند ، منطقی است که نتیجه بگیریم آنها در مورد چترهای ترمز صحبت می کنند هواپیما را متوقف کنید
انواع چترنجات :
1. مخروطی ( conical )-2. هرمی ( pyramid )-3. گرد ( round )-دو نوع چتر گرد وجود دارد ، اولی غیر قابل هدایت ( non-steerable ) که بر اساس سرخوردن در جهت وزش باد می باشد و دومی قابل هدایت ( steerable ) که دارای حفره های بزرگ و برش در لبه ها بوده که اجازه مانور را به آن می دهد.-4. مربعی ( square )-این نوع چترهای نجات دارای سرعت مناسب در باز شدن، پایداری مناسب در هنگام باز شدن و نرخ نزول خوبی است-5. مثلثی (rogallo) این نوع چتر ها قابلیت گلاید و هدایت شوندگی دارند.
6. Ram-Air چترهای Ram-Air خودکار و مشابه پاراگلادیرها هستند که قابلیت های جهت و سرعت و کنترل بیشتر و بهتر در آنها ارائه شده است.
*چترهای کمکی باید قادر به تحمل شوک وارده تا 40 متر بر ثانیه( 144 کیلومتر بر ساعت) داشته باشد
*یک چتر کمکی باید با فشاری کمتر از 7 کیلوگرم بر ثانیه ازمحل خود بیرون بیاید
*در بالاترین وزن بیشترین sink کمکی 5.5 متر بر ثانیه می باشد
محل های اصلی قرار گرفتن چتر کمکی در صندلی خلبانان پاراگلایدر:
1.کمکی جلو( وصل به کارابین های صندلی خلبان)
*خلبان دید مناسبی بر روی آن دارد.
*با هر دو دست می توان کمکی را کشید.
*به هر دو طرف می توان پرت کرد.
*مقداری دست و پا گیر و مزاحم در هنگام تیک آف و فرود.
2.کمکی(بغل، زیر، پشت) و وصل به پشت صندلی خلبان
* مزاحمتی در حین تیک آف و فرود برای خلبان ایجاد نمی کند
*خلبان با توجه به چپ دست یا راست دست بودن محل قرار گرفتن دستگیره کمکی را انتخاب می کند
*در هنگام کشیده شدن خلبان را به حالت ایستاده در می آورد
* در هنگام نیاز به استفاده نیاز به دقت بیشتری جهت پیدا کردن دستگیره کمکی می باشد.
مراحل کشیدن کمکی
( نگاه کن – بگیر – بکش )
1. نگاه کردن و پیدا کردن دستگیره کمکی
2. کشیدن و با قدرت پرت کردن
3.اطمینان از باز شدن کامل و صحیح چتر کمکی
4. جمع کردن بال اصلی
*بعد از کشیدن چتر کمکی با استفاده از برک ها حتما بال پاراگلایدر خود را از پرواز خارج و جمع کنید
توجه کنید عبارت كنست از 2 قسمت CAN به معني قوطي (قوطي نوشابه) و SAT (مخفف Satellite به معني ماهواره) تشكيل ميشود
CanSat شبیه سازی یک ماهواره واقعی است که در حجم و شکل قوطی نوشابه قرار دارد. چالش دانشجویان این است که تمام زیر سیستم های اصلی موجود در ماهواره مانند برق ، سنسورها و یک سیستم ارتباطی را در این کمترین حجم قرار دهند.
سپس CanSat توسط یک موشک تا ارتفاع حدود یک کیلومتری پرتاب می شود یا از سکو یا بالون به پایین پرتاب می شود. سپس ماموریت آن آغاز می شود. این شامل انجام یک آزمایش علمی ، دستیابی به فرود ایمن و تجزیه و تحلیل داده های جمع آوری شده است.
CanSats فرصتی بی نظیر را برای دانشجویان فراهم می کند تا اولین تجربه عملی یک پروژه فضایی واقعی را داشته باشند. آنها مسئول همه جنبه ها هستند: حسگرها و ارسال آن به ایستگاه پایه واقع در
تیم من باید یک CanSat بسازد و برای انجام یک مأموریت اجباری اولیه و مأموریت ثانویه آن را برنامه ریزی کند.
مأموریت اصلی شامل اندازه گیری پارامترهای زیر و انتقال داده های زیر به عنوان تله متری به ایستگاه زمینی حداقل یک ثانیه است:
· دمای هوا - سنسور دما و فشار
· فشار هوا - سنسور دما و فشار
ماموریت ثانویه CanSat باید توسط تیم انتخاب شود. ما در مورد موارد زیر تصمیم گرفتیم:
· فرود هدفمند با استفاده از پارافویل - استفاده از موتورهای سرو برای فرمان
· فعالیت فتوسنتز را با فیلتر مخصوص دوربین اندازه گیری کنید -
· جمع آوری اطلاعات GPS (همچنین برای فرود هدفمند نیز مفید است)
تمام داده ها با استفاده از گیرنده منتقل می شوند.
سخت افزار و ماموریت های CanSat باید مطابق با الزامات و محدودیت های زیر طراحی شوند:
تمام اجزای CanSat باید در یک قوطی نوشابه استاندارد قرار بگیرند (ارتفاع 115 میلی متر و قطر 66 میلی متر) ، به استثنای چتر نجات. آنتن های رادیویی و آنتن های GPS بسته به نوع طراحی ، می توانند به صورت خارجی (در بالا یا پایین قوطی ، اما نه در کناره ها) نصب شوند.
NB ناحیه بار موشک به ازای هر CanSat موجود ، در امتداد بعد محوری قوطی (یعنی ارتفاع) ، 4.5 سانتی متر فضا دارد که باید تمام عناصر خارجی را شامل شود: چتر ، سخت افزار اتصال چتر و هر آنتن.
آنتن ها ، مبدل ها و سایر عناصر CanSat نمی توانند فراتر از قطر قوطی باشند تا زمانی که وسیله پرتاب را ترک کند.
جرم CanSat باید بین 300 تا 350 گرم باشد. CanSats که سبک تر است باید بالاست اضافی را با خود ببرد تا به حداقل 300 گرم جرم مورد نیاز برسد.
مواد منفجره ، چاشنی ، مواد شیمیایی و مواد قابل اشتعال یا خطرناک اکیداً ممنوع است. تمام مواد استفاده شده باید برای پرسنل ، تجهیزات و محیط زیست ایمن باشد. در صورت تردید ، داده های ایمنی مواد (MSDS) درخواست می شود.
CanSat باید توسط باتری و / یا صفحات خورشیدی تأمین شود. برای چهار ساعت مداوم باید سیستم ها روشن شوند.
در صورت نیاز به تعویض / شارژ باتری باید به راحتی در دسترس باشد.
CanSat باید دارای یک سوئیچ قدرت اصلی باشد که به راحتی قابل دسترسی باشد.
گنجاندن سیستم بازیابی (بوق ، چراغ رادیویی ، GPS و غیره) توصیه می شود.
CanSat باید یک سیستم بازیابی ، مانند چتر داشته باشد که پس از پرتاب قابل استفاده مجدد باشد. توصیه می شود از پارچه ای با رنگ روشن استفاده کنید که باعث بهبود CanSat پس از فرود می شود.
اتصال چتر باید تا 1000 N نیرو تحمل کند. برای اطمینان از عملکرد اسمی سیستم باید قدرت چتر را آزمایش کرد.
به دلایل بهبودی ، حداکثر زمان پرواز 120 ثانیه توصیه می شود. در صورت تلاش برای فرود مستقیم ، حداکثر 170 ثانیه زمان پرواز توصیه می شود.
به دلایل بهبودی سرعت نزول بین 8 تا 11 متر بر ثانیه توصیه می شود. در صورت فرود مستقیم ، میزان نزولی کمتری از 6m / s توصیه می شود.
CanSat باید بتواند شتاب حداکثر 20 گرم را تحمل کند.
بودجه کل مدل نهایی CanSat نباید بیش از 500 یورو باشد. ایستگاه های زمینی (GS) و هر مورد مربوط به غیر پرواز در بودجه در نظر گرفته نمی شود. در بخش بعدی اطلاعات بیشتر در مورد مجازات ها در صورتی که تیم ها بیش از بودجه اعلام شده داشته باشند ، می توانید پیدا کنید.
در صورت حمایت مالی ، کلیه موارد به دست آمده باید در بودجه با هزینه های متناظر واقعی در بازار مشخص شود.
CanSat باید پس از ورود به کمپین پرتاب آماده پرواز باشد. قبل از راه اندازی ، معاینه فنی نهایی CanSats توسط پرسنل مجاز انجام می شود.
-
rohamavation
نام: roham hesami radرهام حسامی راد
محل اقامت: 100 مایلی شمال لندن جاده آیلستون، لستر، لسترشر. LE2
عضویت : سهشنبه ۱۳۹۹/۸/۲۰ - ۰۸:۳۴
پست: 3286-
سپاس: 5494
- جنسیت:
تماس:
Re: هوافضا
پیشرانه موشکی
پیشرانه است که به وسیله آن نیرویی برای تغییر سرعت یک وسیله نقلیه اعمال می شود و هم سرعت آن و هم جهت آن را تحت تأثیر قرار می ده. رانش وارد شده به یک موشک به دلیل واکنش ناشی از حرکت یک جت پرسرعت است که در خلاف جهت شتاب گیری و البته.توجه کنید رانش متناسب با محصول دبی جریان جرم است ،، و سرعت ، V جت (یعنی) این نیروهای پیشرانه برای غلبه بر جاذبه و کشیدن و هدایت وسیله نقلیه استفاده می شود.و در ضمن ببینید هر دو موتور موشک و جت از پیشرانه جت برای توسعه رانش استفاده می کنند. پیشرانه موشکی با هواپیمای جت متفاوت است که تنفس هوا هست زیرا موشک ها دارای پیشرانه های خودگردان هستند. اساس منبع انرژی طبقه بندی می شوند که برای تسریع سیال کار استفاده می شود. .
پیشرانه گاز سرد شامل یک منبع کنترل شده گاز تحت فشار و یک نازل ساده ترین شکل موتور موشک است.
تکانه ویژه به عنوان معیار سنجش عملکرد پیشرانه ها استفاده می شود. بر اساس قانون سوم نیوتن $\Large { { p _ 1 } } = { \left ( { m – d m } \right ) \left ( { v + d v } \right ) } $ومومنتوم گاز خارج شده $ \Large { p _ 2 } = d m \left ( { v – u } \right )$ قانون پایستگی مومنتوم و اینکه جرم موشک نسبت به زمان متغییر هست $ \Large { p = { p _ 1 } + { p _ 2 }\;\;}\Rightarrow { m v = \left( { m – d m } \right) \left( { v + d v } \right ) }+{ d m \left ( { v – u } \right)}$ به صورت $\Large m \frac { { d v } }{ { d t } } = u \frac { { d m } } {{ d t } } $که u برابر با سرعت گاز خروجی نسبت به موشک حالا شد حل معادله دیفرانسیل $\Large {dv = u\frac{{dm}}{m} \;\;}\Rightarrow { \int \limits _ { { v _ 0 } } ^ { {v _ 1 } } { d v } = \int \limits _ { { m _ 0 } } ^ { { m _ 1 } } { u \frac { { d m } } { m} } } $که بدست میاد $\Large \boxed {{{ v = u \ln \frac { { { m _ 0 } } } { m } } }} $ اگه من بگم جرم موشک با گذشت زمان به طور خطی تغییر میکند.$\Large m \left ( t \right ) = { m _ 0 } – \mu t $میشه بگم $ \Large { v \left ( t \right ) } = { u\ln \frac { { {m _0 } } }{ { { m _ 0 } – \mu t} } }$ حالا شتاب اون هم $\Large \require{cancel} {\frac{{dv}}{{dt}} = a\left( t \right) }
= {{u\frac{1}{{\frac{{{m_0}}}{{{m_0} – \mu t}}}} \cdot}\kern0pt { \frac { { \left( { – {m_0}} \right)\left( { – \mu } \right)}}{{{{\left( {{m_0} – \mu t} \right ) } ^ 2 } }} }} = { \frac { { u \mu } } { { { m _0 } – \mu t}}} $
توضیح نازل هایی که با کاهش سرعت جریان کار می کنند غلط و اشتباه انگیز هست . نازل ها همیشه جریان عبوری از آنها را تسریع می کنند. ابتدا باید درک کرد که چه نوع جریانی از نازل عبور می کند. . . اما .معادله کارایی یک راکت $ \eta_p= \frac {2\, (\frac {v} {v_e})} {1 + ( \frac {v} {v_e} )^2 }$که در آن v سرعت موشک است و ve سرعت خروجی است.
من هنوز عمیقاً متحیر هستم ، چگونه می تواند باشد که کارآیی موشک به سرعت بستگی دارد؟ همانطور که در مورد موشک ها می فهمم ، انتظار دارم همان مقدار سوخت بدون توجه به سرعت فعلی ، به همان افزایش سرعت تبدیل شود. .
پاسخ این است که سوخت در یک موشک در حال حرکت مقداری انرژی جنبشی دارد . بالاخره با سرعت زیادی نسبتاً به سمت زمین در حرکت است. مقدار این انرژی به سرعت حرکت موشک بستگی دارد و تا حدودی جای تعجب دارد که موتور موشک می تواند این انرژی را استخراج کرده و به کار مفید تبدیل کند. ممکن است مشاهده کنید که فرمولی که نشان داده اید درصورتی که سرعت موشک برابر با سرعت خروجی موشک (v = ve) باشد ، به بازدهی 100٪ می رسد. این بدان دلیل است که در صورت v = سرعت خروجی نسبتاً به زمین صفر خواهد بود و تمام انرژی جنبشی ذخیره شده در سوخت به طور کامل توسط موتور موشک استخراج می شود و برای تسریع موشک استفاده می شود
در ارتفاع کم ، نازل موتور بیش از حد گسترش می یابد. فشار داخل لبه نازل کمتر از فشار محیط است ، بنابراین یک فشار فشاری روی نازل وجود دارد.
در ارتفاعات ، فشار محیط به جایی کاهش می یابد که از فشار داخل لبه نازل کمتر باشد: نازل در حال حاضر گسترش نیافته است و نیروی لبه به سمت خارج است.
تعریف جریان ایزنتروپیک این است که جریان هم آدیاباتیک است (هیچ گرمی به داخل یا خارج از آن منتقل نمی شود) و هم برگشت پذیر است (انرژی در آن صرفه جویی می شود). من تعجب می کنم که چرا جریان از طریق یک نازل موشک ایزنتروپیک است. آیا نباید انتقال گرما بین جریان و نازل و نیروی مقاومتی نازل را که هنگام عبور جریان تجربه می شود ، در نظر گرفت؟
علاوه بر این ، كتابی كه می خوانم می گوید كه سرعت جریان جرم ثابت است زیرا جریان ایزنتروپیك است ، كه كاملاً نمی فهمم: با عبور جریان از نازل ، منبسط و شتاب ، انرژی از فشار به سرعت می رسد. اما چگونه می توان از این نتیجه گرفت که سرعت جریان جرم ثابت است؟
نکته آخر اینکه مهم است که سرعت جریان جرم اگزوز هنگام عبور از نازل ثابت باشد. با این حال ، اگر ما در مورد توده اگزوز است که موشک را در یک واحد زمان ترک می کند ، آیا هنوز هم با تغییرات کمی بیشتر ثابت است؟ اگر چنین باشد ، آیا سرعت سرعت خروج اگزوز از موشک و رانش نیز با گذشت زمان ثابت است؟
جریان ایزنتروپیک
اول از همه: جریان در یک نازل موشک واقعی ایزنتروپیک نیست. این یک فرض ساده است که منطقی به مشاهدات اندازه گیری واقعی نزدیک هست خوب البته متغییر های زیادی هستند و من . همانطور که در مورد نظریه ایده آل موشک وجود دارد ، برسی میکنم
بنابراین کاملاً درست می گویید ، در اثر جاری شدن گرما به محیط اطراف و تلفات اصطکاک در دیواره نازل تلفاتی وجود دارد. با این حال ، اینها به اندازه کافی کوچک هستند که وانمود می کنند که در آنجا نیستند ، تقریب های خوبی در دنیای واقعی ارائه می دهد. صرفه نظر کردم دیدید
توجه داشته باشید که این تنها در صورتی است که جریان به تدریج گسترش یافته و فشرده شود. هنگامی که امواج شوک به دلیل انبساط بیش از حد یا کم در جریان وجود داشته باشند ، فرضیات ایزنتروپیک جریان دیگر کار نمی کند.
جریان انبوه ثابت
معادله ای که سپس به این جریان جرم می دهد:
$ \dot{m}=\frac{A_t p_c}{\sqrt{R\cdot T_c}} \sqrt{\gamma}\bigg(\frac{\gamma+1}{2}\bigg)^{-\frac{\gamma+1}{2(\gamma-1)}}$
با At ناحیه گلو ، pc فشار محفظه ، R ثابت گاز ، Tc دمای اتاق و γ نسبت گرمای خاص.
آنها را با عملکرد vandenkerckhove جایگزین کنیم
با At ناحیه گلو ، pc فشار محفظه ، R ثابت گاز ، Tc دمای محیط و γ نسبت گرمای خاص.
حالا، بنابراین اجازه دهید آنها را با عملکرد vandenkerckhove جایگزین کنیم Γ، فقط برای اینکه بهتر به نظر برسد
$ \dot{m}=\frac{\Gamma A_t p_c}{\sqrt{R\cdot T_c}}$
اکنون Γ و R ثابت هستند ، At باید ثابت باشد (مگر اینکه در اثر حرارت گلوی نازل شما ذوب شود: P) و pc و Tcباید ثابت باشد هنگامی که موتور شما در حالت ثابت کار می کند ، بنابراین جریان جرم شما ثابت خواهد بود. و معادله جریان جرمی داده شده . بنابراین به همین دلیل برای جریان ایزنتروپی جریان جرم ثابت است.
شرایط اگزوز
با حفظ ساده جرم ، هنگامی که جریان توده در گلو ثابت شد ، باید جریان در خروج نازل نیز جریان داشته باشد. در غیر این صورت توده بین حلق نازل و خروج جمع می شود. در زندگی واقعی مطمئناً نوساناتی وجود دارد و جریان جرم ممکن است توسط طراحی به دلیل فشار گاز تغییر کند ، اما تحت ایده آل نظریه موشک ثابت است.
با فرض اینکه فشار و دما محفظه ای که قبلاً گفتم ، تغییر نکرده اند ، سرعت معادل آن نیز ثابت است و بنابراین رانش می کند. از آنجا که رانش برابر است با جریان جرم برابر سرعت مشخصه $ F=\dot{m}\cdot v_{eq}$
* (تا زمانی که فشار محیط تغییر نکند ، بنابراین برای موشکی که به آرامی در جو بالا می رود سرعت برابر و رانش نیز تغییر می کند)
جریان جرم مستقیماً به وزن مولکولی از طریق ثابت گاز منفرد وابسته است که ثابت جهانی گاز بر وزن مولکولی آن تقسیم می شود
$R = \frac{R_u}{M_gas} $
غیرمستقیم: تغییر پیشران / احتراق برای بدست آوردن وزن مولکولی متفاوت ، همه پارامترهای دیگر را نیز تغییر می دهد به جز به احتمال زیاد.
بله و خیر. $ F=\dot{m}v_e$را اغلب مشاهده خواهید کرد ، اما این فقط در صورتی درست است که نازل به طور مطلوب منبسط شود ، بنابراین فشار خروجی برابر با فشار محیط است. بنابراین بهتر است از سرعت معادل داده شده توسط فرمول زیر استفاده کنید: $veq = ve + pe − pam˙⋅Ae$
با veq و ve به ترتیب و سرعت خروجی ، به ترتیب فشار خروج نازل ، فشار محیط ، متر مکعب سرعت جریان جرم و Ae منطقه خروج نازل همانطور که می بینید ve و veq برابر هستند اگر pe = pa ، اگر شتاب مداومی برای موشک خود داشته باشید ، این بدان معناست که شما باید دائماً گاز را پایین بکشید ، زیرا موشک شما با بیرون راندن همه پیشرانه سبک و سبک می شود. یا شاید شما بخواهید با سرعت کمتری از جو پایین عبور کنید تا کشش آنچنانی نداشته باشد بلکه از دست دادن نیروی جاذبه بیشتری داشته باشید. اما چگونگی و چرا گاز دادن بیشتر مربوط به موضوع Rocket Motion است که به خودی خوداندازه یک کتاب است. و بحث سنگینی هست من فقط مطلب ساده را میگم
بگویید موشک من می تواند F نیوتون رانش تولید کند در حالی که M1 کیلوگرم سوخت در ثانیه مصرف می کند. جرم آن در آغاز M0 است و تا زمانی که به سرعت V نرسد ، می سوزد.
چگونه می توانم زمان سوختن لازم برای رسیدن موشک به سرعت V را دریابم؟$\Delta T = \frac {M_L E_V} {F} (1 - e ^ {-\frac {\Delta V } {E_V}}) $ΔT: طول سوختگی در چند ثانیه
ML: جرم کل موشک در ابتدای سوختگی (که اغلب m0 نوشته می شود)
EV = سرعت اگزوز بر حسب متر / ثانیه (اغلب به صورت ve نوشته می شود).
F: رانش موشک در نیوتون.
ΔV = Delta-V سوختگی در متر بر ثانیه.
M0 شما این معادله ML است. سرعت اگزوز EV برابر با رانش تقسیم بر سرعت جریان جرم است (این F و M1 شما است).
سرعت اگزوز یکی از دو فرم استاندارد برای نشان دادن تکانه خاص جرم است. اما توجه کنید در محاسبات واقعی از نیروی ثانیه در هر پوند از جرم است استفاده میشود.
برای یک راکت من ، چگونه نیروی محرکه را محاسبه کنم
$F = \dot{m} V_e + (p_e - p_0) A_e $
محاسبه شتاب و فشار دینامیکی توجه کنید $q = \frac{1}{2} \rho v^2 $ و نیروی درگ $F_D = -\frac{1}{2} \rho C_D A v^2 $ خوی شتاب گرانشی هم $ a_{Grav} = -GM_E/(R_E+x)^2$حالا شتاب میدونید که $ a = \frac{F_{tot}}{m(t)} = \frac{F_{Thrust} + F_{Drag}}{m(t)} + a_{Grav}$
حالا در ضمن جرم متغییر داریم $m(t) = m_0 - \dot{m}t $
و نیروی تراست $F_{Thrust}=\dot{m} v_{ex} $بگذارید اینطور بگم $a = \frac{\dot{m} v_{ex} + F_{Drag}}{m_0 - \dot{m}t} + a_{Grav} $ که $a = \frac{\dot{m} v_{ex} - \frac{1}{2} \rho C_D A v^2}{m_0 - \dot{m}t} - \frac{GM_E}{(R_E+x)^2} $ نوشته میشه حالامن هنوز باید تراکم را برای تعریف q بدانم ، و ما می توانیم از یک تقریب ارتفاع مقیاس ساده استفاده کنیم که کمی شبیه نمودارهای فشار شما در برابر ارتفاع باشد. با فرض ثابت بودن دمای جو (که اینطور نیست) می توان گفت چگالی و فشار همیشه متناسب هستند. سپس$ \rho(x) = \rho_0 \exp(-x/h_{scale})$ خوب در معاددله بگذارم $ a(t) = \frac{\dot{m} v_{ex} - \frac{1}{2} \rho_0 \exp(-x(t)/h_{scale}) C_D A v^2(t)}{m_0 - \dot{m}t} - \frac{GM_E}{(R_E+x(t))^2}$این یک معادله است که هر سه این موارد را دارد: ارتفاع ، سرعت و شتاب (x ، v و a) و بنابراین حل کردن برای v (t) و x (t) برای بدست آوردن $q(t)=\frac{1}{2} \rho(t) v^2(t) = \frac{1}{2} \rho_0 \exp(-x(t)/h_{scale}) v^2(t) $
پیشرانه است که به وسیله آن نیرویی برای تغییر سرعت یک وسیله نقلیه اعمال می شود و هم سرعت آن و هم جهت آن را تحت تأثیر قرار می ده. رانش وارد شده به یک موشک به دلیل واکنش ناشی از حرکت یک جت پرسرعت است که در خلاف جهت شتاب گیری و البته.توجه کنید رانش متناسب با محصول دبی جریان جرم است ،، و سرعت ، V جت (یعنی) این نیروهای پیشرانه برای غلبه بر جاذبه و کشیدن و هدایت وسیله نقلیه استفاده می شود.و در ضمن ببینید هر دو موتور موشک و جت از پیشرانه جت برای توسعه رانش استفاده می کنند. پیشرانه موشکی با هواپیمای جت متفاوت است که تنفس هوا هست زیرا موشک ها دارای پیشرانه های خودگردان هستند. اساس منبع انرژی طبقه بندی می شوند که برای تسریع سیال کار استفاده می شود. .
پیشرانه گاز سرد شامل یک منبع کنترل شده گاز تحت فشار و یک نازل ساده ترین شکل موتور موشک است.
تکانه ویژه به عنوان معیار سنجش عملکرد پیشرانه ها استفاده می شود. بر اساس قانون سوم نیوتن $\Large { { p _ 1 } } = { \left ( { m – d m } \right ) \left ( { v + d v } \right ) } $ومومنتوم گاز خارج شده $ \Large { p _ 2 } = d m \left ( { v – u } \right )$ قانون پایستگی مومنتوم و اینکه جرم موشک نسبت به زمان متغییر هست $ \Large { p = { p _ 1 } + { p _ 2 }\;\;}\Rightarrow { m v = \left( { m – d m } \right) \left( { v + d v } \right ) }+{ d m \left ( { v – u } \right)}$ به صورت $\Large m \frac { { d v } }{ { d t } } = u \frac { { d m } } {{ d t } } $که u برابر با سرعت گاز خروجی نسبت به موشک حالا شد حل معادله دیفرانسیل $\Large {dv = u\frac{{dm}}{m} \;\;}\Rightarrow { \int \limits _ { { v _ 0 } } ^ { {v _ 1 } } { d v } = \int \limits _ { { m _ 0 } } ^ { { m _ 1 } } { u \frac { { d m } } { m} } } $که بدست میاد $\Large \boxed {{{ v = u \ln \frac { { { m _ 0 } } } { m } } }} $ اگه من بگم جرم موشک با گذشت زمان به طور خطی تغییر میکند.$\Large m \left ( t \right ) = { m _ 0 } – \mu t $میشه بگم $ \Large { v \left ( t \right ) } = { u\ln \frac { { {m _0 } } }{ { { m _ 0 } – \mu t} } }$ حالا شتاب اون هم $\Large \require{cancel} {\frac{{dv}}{{dt}} = a\left( t \right) }
= {{u\frac{1}{{\frac{{{m_0}}}{{{m_0} – \mu t}}}} \cdot}\kern0pt { \frac { { \left( { – {m_0}} \right)\left( { – \mu } \right)}}{{{{\left( {{m_0} – \mu t} \right ) } ^ 2 } }} }} = { \frac { { u \mu } } { { { m _0 } – \mu t}}} $
توضیح نازل هایی که با کاهش سرعت جریان کار می کنند غلط و اشتباه انگیز هست . نازل ها همیشه جریان عبوری از آنها را تسریع می کنند. ابتدا باید درک کرد که چه نوع جریانی از نازل عبور می کند. . . اما .معادله کارایی یک راکت $ \eta_p= \frac {2\, (\frac {v} {v_e})} {1 + ( \frac {v} {v_e} )^2 }$که در آن v سرعت موشک است و ve سرعت خروجی است.
من هنوز عمیقاً متحیر هستم ، چگونه می تواند باشد که کارآیی موشک به سرعت بستگی دارد؟ همانطور که در مورد موشک ها می فهمم ، انتظار دارم همان مقدار سوخت بدون توجه به سرعت فعلی ، به همان افزایش سرعت تبدیل شود. .
پاسخ این است که سوخت در یک موشک در حال حرکت مقداری انرژی جنبشی دارد . بالاخره با سرعت زیادی نسبتاً به سمت زمین در حرکت است. مقدار این انرژی به سرعت حرکت موشک بستگی دارد و تا حدودی جای تعجب دارد که موتور موشک می تواند این انرژی را استخراج کرده و به کار مفید تبدیل کند. ممکن است مشاهده کنید که فرمولی که نشان داده اید درصورتی که سرعت موشک برابر با سرعت خروجی موشک (v = ve) باشد ، به بازدهی 100٪ می رسد. این بدان دلیل است که در صورت v = سرعت خروجی نسبتاً به زمین صفر خواهد بود و تمام انرژی جنبشی ذخیره شده در سوخت به طور کامل توسط موتور موشک استخراج می شود و برای تسریع موشک استفاده می شود
در ارتفاع کم ، نازل موتور بیش از حد گسترش می یابد. فشار داخل لبه نازل کمتر از فشار محیط است ، بنابراین یک فشار فشاری روی نازل وجود دارد.
در ارتفاعات ، فشار محیط به جایی کاهش می یابد که از فشار داخل لبه نازل کمتر باشد: نازل در حال حاضر گسترش نیافته است و نیروی لبه به سمت خارج است.
تعریف جریان ایزنتروپیک این است که جریان هم آدیاباتیک است (هیچ گرمی به داخل یا خارج از آن منتقل نمی شود) و هم برگشت پذیر است (انرژی در آن صرفه جویی می شود). من تعجب می کنم که چرا جریان از طریق یک نازل موشک ایزنتروپیک است. آیا نباید انتقال گرما بین جریان و نازل و نیروی مقاومتی نازل را که هنگام عبور جریان تجربه می شود ، در نظر گرفت؟
علاوه بر این ، كتابی كه می خوانم می گوید كه سرعت جریان جرم ثابت است زیرا جریان ایزنتروپیك است ، كه كاملاً نمی فهمم: با عبور جریان از نازل ، منبسط و شتاب ، انرژی از فشار به سرعت می رسد. اما چگونه می توان از این نتیجه گرفت که سرعت جریان جرم ثابت است؟
نکته آخر اینکه مهم است که سرعت جریان جرم اگزوز هنگام عبور از نازل ثابت باشد. با این حال ، اگر ما در مورد توده اگزوز است که موشک را در یک واحد زمان ترک می کند ، آیا هنوز هم با تغییرات کمی بیشتر ثابت است؟ اگر چنین باشد ، آیا سرعت سرعت خروج اگزوز از موشک و رانش نیز با گذشت زمان ثابت است؟
جریان ایزنتروپیک
اول از همه: جریان در یک نازل موشک واقعی ایزنتروپیک نیست. این یک فرض ساده است که منطقی به مشاهدات اندازه گیری واقعی نزدیک هست خوب البته متغییر های زیادی هستند و من . همانطور که در مورد نظریه ایده آل موشک وجود دارد ، برسی میکنم
بنابراین کاملاً درست می گویید ، در اثر جاری شدن گرما به محیط اطراف و تلفات اصطکاک در دیواره نازل تلفاتی وجود دارد. با این حال ، اینها به اندازه کافی کوچک هستند که وانمود می کنند که در آنجا نیستند ، تقریب های خوبی در دنیای واقعی ارائه می دهد. صرفه نظر کردم دیدید
توجه داشته باشید که این تنها در صورتی است که جریان به تدریج گسترش یافته و فشرده شود. هنگامی که امواج شوک به دلیل انبساط بیش از حد یا کم در جریان وجود داشته باشند ، فرضیات ایزنتروپیک جریان دیگر کار نمی کند.
جریان انبوه ثابت
معادله ای که سپس به این جریان جرم می دهد:
$ \dot{m}=\frac{A_t p_c}{\sqrt{R\cdot T_c}} \sqrt{\gamma}\bigg(\frac{\gamma+1}{2}\bigg)^{-\frac{\gamma+1}{2(\gamma-1)}}$
با At ناحیه گلو ، pc فشار محفظه ، R ثابت گاز ، Tc دمای اتاق و γ نسبت گرمای خاص.
آنها را با عملکرد vandenkerckhove جایگزین کنیم
با At ناحیه گلو ، pc فشار محفظه ، R ثابت گاز ، Tc دمای محیط و γ نسبت گرمای خاص.
حالا، بنابراین اجازه دهید آنها را با عملکرد vandenkerckhove جایگزین کنیم Γ، فقط برای اینکه بهتر به نظر برسد
$ \dot{m}=\frac{\Gamma A_t p_c}{\sqrt{R\cdot T_c}}$
اکنون Γ و R ثابت هستند ، At باید ثابت باشد (مگر اینکه در اثر حرارت گلوی نازل شما ذوب شود: P) و pc و Tcباید ثابت باشد هنگامی که موتور شما در حالت ثابت کار می کند ، بنابراین جریان جرم شما ثابت خواهد بود. و معادله جریان جرمی داده شده . بنابراین به همین دلیل برای جریان ایزنتروپی جریان جرم ثابت است.
شرایط اگزوز
با حفظ ساده جرم ، هنگامی که جریان توده در گلو ثابت شد ، باید جریان در خروج نازل نیز جریان داشته باشد. در غیر این صورت توده بین حلق نازل و خروج جمع می شود. در زندگی واقعی مطمئناً نوساناتی وجود دارد و جریان جرم ممکن است توسط طراحی به دلیل فشار گاز تغییر کند ، اما تحت ایده آل نظریه موشک ثابت است.
با فرض اینکه فشار و دما محفظه ای که قبلاً گفتم ، تغییر نکرده اند ، سرعت معادل آن نیز ثابت است و بنابراین رانش می کند. از آنجا که رانش برابر است با جریان جرم برابر سرعت مشخصه $ F=\dot{m}\cdot v_{eq}$
* (تا زمانی که فشار محیط تغییر نکند ، بنابراین برای موشکی که به آرامی در جو بالا می رود سرعت برابر و رانش نیز تغییر می کند)
جریان جرم مستقیماً به وزن مولکولی از طریق ثابت گاز منفرد وابسته است که ثابت جهانی گاز بر وزن مولکولی آن تقسیم می شود
$R = \frac{R_u}{M_gas} $
غیرمستقیم: تغییر پیشران / احتراق برای بدست آوردن وزن مولکولی متفاوت ، همه پارامترهای دیگر را نیز تغییر می دهد به جز به احتمال زیاد.
بله و خیر. $ F=\dot{m}v_e$را اغلب مشاهده خواهید کرد ، اما این فقط در صورتی درست است که نازل به طور مطلوب منبسط شود ، بنابراین فشار خروجی برابر با فشار محیط است. بنابراین بهتر است از سرعت معادل داده شده توسط فرمول زیر استفاده کنید: $veq = ve + pe − pam˙⋅Ae$
با veq و ve به ترتیب و سرعت خروجی ، به ترتیب فشار خروج نازل ، فشار محیط ، متر مکعب سرعت جریان جرم و Ae منطقه خروج نازل همانطور که می بینید ve و veq برابر هستند اگر pe = pa ، اگر شتاب مداومی برای موشک خود داشته باشید ، این بدان معناست که شما باید دائماً گاز را پایین بکشید ، زیرا موشک شما با بیرون راندن همه پیشرانه سبک و سبک می شود. یا شاید شما بخواهید با سرعت کمتری از جو پایین عبور کنید تا کشش آنچنانی نداشته باشد بلکه از دست دادن نیروی جاذبه بیشتری داشته باشید. اما چگونگی و چرا گاز دادن بیشتر مربوط به موضوع Rocket Motion است که به خودی خوداندازه یک کتاب است. و بحث سنگینی هست من فقط مطلب ساده را میگم
بگویید موشک من می تواند F نیوتون رانش تولید کند در حالی که M1 کیلوگرم سوخت در ثانیه مصرف می کند. جرم آن در آغاز M0 است و تا زمانی که به سرعت V نرسد ، می سوزد.
چگونه می توانم زمان سوختن لازم برای رسیدن موشک به سرعت V را دریابم؟$\Delta T = \frac {M_L E_V} {F} (1 - e ^ {-\frac {\Delta V } {E_V}}) $ΔT: طول سوختگی در چند ثانیه
ML: جرم کل موشک در ابتدای سوختگی (که اغلب m0 نوشته می شود)
EV = سرعت اگزوز بر حسب متر / ثانیه (اغلب به صورت ve نوشته می شود).
F: رانش موشک در نیوتون.
ΔV = Delta-V سوختگی در متر بر ثانیه.
M0 شما این معادله ML است. سرعت اگزوز EV برابر با رانش تقسیم بر سرعت جریان جرم است (این F و M1 شما است).
سرعت اگزوز یکی از دو فرم استاندارد برای نشان دادن تکانه خاص جرم است. اما توجه کنید در محاسبات واقعی از نیروی ثانیه در هر پوند از جرم است استفاده میشود.
برای یک راکت من ، چگونه نیروی محرکه را محاسبه کنم
$F = \dot{m} V_e + (p_e - p_0) A_e $
محاسبه شتاب و فشار دینامیکی توجه کنید $q = \frac{1}{2} \rho v^2 $ و نیروی درگ $F_D = -\frac{1}{2} \rho C_D A v^2 $ خوی شتاب گرانشی هم $ a_{Grav} = -GM_E/(R_E+x)^2$حالا شتاب میدونید که $ a = \frac{F_{tot}}{m(t)} = \frac{F_{Thrust} + F_{Drag}}{m(t)} + a_{Grav}$
حالا در ضمن جرم متغییر داریم $m(t) = m_0 - \dot{m}t $
و نیروی تراست $F_{Thrust}=\dot{m} v_{ex} $بگذارید اینطور بگم $a = \frac{\dot{m} v_{ex} + F_{Drag}}{m_0 - \dot{m}t} + a_{Grav} $ که $a = \frac{\dot{m} v_{ex} - \frac{1}{2} \rho C_D A v^2}{m_0 - \dot{m}t} - \frac{GM_E}{(R_E+x)^2} $ نوشته میشه حالامن هنوز باید تراکم را برای تعریف q بدانم ، و ما می توانیم از یک تقریب ارتفاع مقیاس ساده استفاده کنیم که کمی شبیه نمودارهای فشار شما در برابر ارتفاع باشد. با فرض ثابت بودن دمای جو (که اینطور نیست) می توان گفت چگالی و فشار همیشه متناسب هستند. سپس$ \rho(x) = \rho_0 \exp(-x/h_{scale})$ خوب در معاددله بگذارم $ a(t) = \frac{\dot{m} v_{ex} - \frac{1}{2} \rho_0 \exp(-x(t)/h_{scale}) C_D A v^2(t)}{m_0 - \dot{m}t} - \frac{GM_E}{(R_E+x(t))^2}$این یک معادله است که هر سه این موارد را دارد: ارتفاع ، سرعت و شتاب (x ، v و a) و بنابراین حل کردن برای v (t) و x (t) برای بدست آوردن $q(t)=\frac{1}{2} \rho(t) v^2(t) = \frac{1}{2} \rho_0 \exp(-x(t)/h_{scale}) v^2(t) $
-
rohamavation
نام: roham hesami radرهام حسامی راد
محل اقامت: 100 مایلی شمال لندن جاده آیلستون، لستر، لسترشر. LE2
عضویت : سهشنبه ۱۳۹۹/۸/۲۰ - ۰۸:۳۴
پست: 3286-
سپاس: 5494
- جنسیت:
تماس:
Re: هوافضا
درسهایی که میدن و ما هم الزامی داریم و هم اختیاری که در صورت عدم ارایه توسط دانشگاه باید درس اختیاری که اونا میدن بگذرونیم حالا عدم رسیدن کلاس به حد نصاب و یا انتخاب خود دانشگاه
ریاضی عمومی 1 (Calculus I)تعداد واحد عملی: - تعداد واحد نظري: 3 : دارد نوع درس: پایه پیشنیاز: ندارد
ریاضی عمومی 2 (Calculus II)تعداد واحد عملی: - تعداد واحد نظري: 3 نوع درس: پایه پیشنیاز: ریاضی عمومی 1
معادلات دیفرانسیل (Differential Equations)تعداد واحد عملی: - تعداد واحد نظري: 3 نوع درس: پایه پیشنیاز: ریاضی عمومی 1
برنامهنویسی کامپیوتر(Computer Programming)تعداد واحد عملی: - تعداد واحد نظري: 3نوع درس: پایه پیشنیاز: ندارد
محاسبات عددي (Numerical Calculation)تعداد واحد عملی: - تعداد واحد نظري: 2 پیشنیاز: برنامهنویسی کامپیوتر، معادلات نوع درس: پایه دیفرانسیل یا هم نیاز
فیزیک 1) مکانیک و حرارت) (Physics I: Mechanics and Heat)تعداد واحد عملی: - تعداد واحد نظري: 3نوع درس: پایه پیشنیاز: ندارد
آزمایشگاه فیزیک 1 (Physics I Laboratory)تعداد واحد نظري: -تعداد واحد عملی: 1نوع درس: پایه پیشنیاز: فیزیک 1 یا هم نیاز
فیزیک 2) الکتریسیته و مغناطیس)(Physics II: Electromagnetic)تعداد واحد عملی: - تعداد واحد نظري: 3
نوع درس: پایه پیشنیاز: فیزیک 1
آزمایشگاه فیزیک 2(Physics II Laboratory)تعداد واحد نظري: -تعداد واحد عملی: 1نوع درس: پایه پیشنیاز: فیزیک 2 یا هم نیاز
استاتیک(Statics)تعداد واحد عملی: - تعداد واحد نظري: 3 نوع درس: اصلی - الزامی پیشنیاز: ریاضی عمومی 1 و فیزیک 1 یا هم نیاز
مبانی مهندسی برق(Fundamentals of Electric Engineering)تعداد واحد عملی: - تعداد واحد نظري: 3 نوع درس: اصلی - الزامی پیشنیاز: فیزیک 2
دینامیک(Dynamics)تعداد واحد عملی: - تعداد واحد نظري: 4
نوع درس: اصلی - الزامی پیشنیاز: استاتیک مکانیک مصالح 1
(Mechanics of Materials I)تعداد واحد عملی: ـ تعداد واحد نظري: 3نوع درس: اصلی - الزامی پیشنیاز: استاتیک
ریاضی مهندسی(Engineering Mathematics)تعداد واحد عملی: - تعداد واحد نظري: 3نوع درس: اصلی - الزامی پیشنیاز: ریاضی عمومی 2 و معادلات دیفرانسیل
آزمایشگاه مبانی مهندسی برق(Fundamentals of Electrical Engineering Laboratory)تعداد واحد نظري: -تعداد واحد عملی: 1 نوع درس: اصلی - الزامی پیشنیاز: مبانی مهندسی برق
مقدمهاي بر مهندسی هوافضا(Introduction to Aerospace Engineering)تعداد واحد عملی: - تعداد واحد نظري: 2
نوع درس: اصلی - الزامی پیشنیاز: نداردمکانیک سیالات 1
(Fluid Mechanics I)تعداد واحد عملی: - تعداد واحد نظري: 3 نوع درس: اصلی - الزامی پیشنیاز: استاتیک یا هم نیاز
ترمودینامیک 1
(Thermodynamics I) تعداد واحد عملی: - تعداد واحد نظري: 3نوع درس: اصلی - الزامی پیشنیاز: فیزیک 1 ،معادلات دیفرانسیل یا هم نیاز
ترمودینامیک 2(Thermodynamics II)تعداد واحد عملی: - تعداد واحد نظري: 2 نوع درس: اصلی - الزامی پیشنیاز: ترمودینامیک 1
آزمایشگاه مکانیک مصالح (Mechanics of Materials Laboratory)تعداد واحد نظري: -تعداد واحد عملی: 1نوع درس: اصلی - الزامی پیشنیاز: مکانیک مصالح 1
ارتعاشات مکانیکی(Mechanical Vibrations)تعداد واحد عملی: ـ تعداد واحد نظري: 3نوع درس: اصلی - الزامی پیشنیاز: دینامیک و ریاضی مهندسی
کنترل اتوماتیک(Automatic Control)تعداد واحد عملی: ـ تعداد واحد نظري: 3نوع درس: اصلی - الزامی پیشنیاز: ارتعاشات مکانیکی یا هم نیاز
آزمایشگاه دینامیک و ارتعاشات(Dynamics and Vibrations Laboratory)تعداد واحد نظري: -تعداد واحد عملی: 1نوع درس: اصلی - الزامی پیشنیاز: ارتعاشات مکانیکی و دینامیک
انتقال حرارت 1(Heat Transfer I)تعداد واحد عملی: ـ تعداد واحد نظري: 3نوع درس: اصلی - الزامی پیشنیاز: ترمودینامیک 2 و ریاضی مهندسی
آزمایشگاه ترمودینامیک و انتقال حرارت (Thermodynamic and heat transfer Laboratory)تعداد واحد نظري: -تعداد واحد عملی: 1
نوع درس: اصلی - الزامی پیشنیاز: ترمودینامیک 2 و انتقال حرارت
نقشهکشی صنعتی 1(Industrial Drawing I)تعداد واحد نظري: 1تعداد واحد عملی: 1 نوع درس: اصلی - الزامی یشنیاز: ندارد
کارگاه جوشکاري و ورقکاري(Sheet Metal and Welding Workshop)تعداد واحد نظري: -تعداد واحد عملی: 1نوع رس: اصلی - الزامی پیشنیاز: ندارد
کارآموزي 1(Internship I)تعداد واحد نظري: -تعداد واحد عملی: 1نوع درس: اصلی - الزامی پیشنیاز: گذراندن 65 واحد
نقشه کشی صنعتی 2 (Industrial Drawing II)تعداد واحد نظري: 1تعداد واحد عملی: 1 نوع درس: اصلی - الزامی پیشنیاز: نقشه کشی صنعتی 1
کارآموزي 2 (Internship II)تعداد واحد نظري: -تعداد واحد عملی: 1نوع درس: اصلی - الزامی پیشنیاز: کارآموزي 1
مدیریت و ارزیابی پروژه(Project Management and Evaluation)تعداد واحد عملی: ـ تعداد واحد نظري: 2نوع درس: اصلی - الزامی پیشنیاز: ندارد
آئرودینامیک 1(Aerodynamics I)تعداد واحد عملی: - تعداد واحد نظري: 3نوع درس: تخصصی - الزامی پیشنیاز: مکانیک سیالات 1آئرودینامیک 2(Aerodynamics II)تعداد واحد عملی: - تعداد واحد نظري: 3
نوع درس: تخصصی - الزامی پیشنیاز: آئرودینامیک 1
آزمایشگاه آئرودینامیک 1(Aerodynamic Labratory I)تعداد واحد نظري: -تعداد واحد عملی: 1نوع درس: تخصصی - الزامی پیشنیاز: آئرودینامیک 1
مکانیک پرواز 1(Flight Mechanics I)تعداد واحد عملی: - تعداد واحد نظري: 3نوع درس: تخصصی - الزامی پیشنیاز: آئرودینامیک 1
مکانیک پرواز 2(Flight Mechanics II)تعداد واحد عملی: - تعداد واحد نظري: 3نوع درس: تخصصی - الزامی پیشنیاز: دینامیک و مکانیک پرواز 1کنترل اتوماتیک یا هم نیاز
طراحی هواپیما 1(Airplane Design I)تعداد واحد عملی: - تعداد واحد نظري: 3نوع درس: تخصصی - الزامی پیشنیاز: مکانیک پرواز 2 یا هم نیاز
اصول پیشرانش جت (Principles of Jet Propulsion)تعداد واحد عملی: - تعداد واحد نظري: 3نوع درس: تخصصی - الزامی پیشنیاز: مکانیک سیالات 1 و ترمودینامیک 2
تحلیل سازههاي هوایی(Analysis of Aircraft Structures)تعداد واحد عملی: - تعداد واحد نظري: 3نوع درس: تخصصی - الزامی پیشنیاز: مکانیک مصالح 1
طراحی سازههاي هوافضایی(Aerospace Structures Design)تعداد واحد عملی: - تعداد واحد نظري: 3نوع درس: تخصصی - الزامی پیشنیاز: تحلیل سازههاي هوایی
علم مواد و روشهاي ساخت سامانههاي هوافضایی(Material Science and Aerospace Vehicle Manufacturing Methods)
تعداد واحد عملی: - تعداد واحد نظري: 3پیشنیاز: مکانیک مصالح 1 و مقدمهاي بر مهندسی نوع درس: تخصصی - الزامی
هوافضا
استانداردهاي هوافضایی(Aerospace Standards)تعداد واحد عملی: - تعداد واحد نظري: 2
نوع درس: تخصصی - الزامی پیشنیاز: مقدمهاي بر مهندسی هوافضا
کارگاه سازه و سیستمهاي مکانیکی هواپیما(Airplane Structures and Mechanical Systems Workshop)تعداد واحد نظري: -تعداد احد عملی: 1پیشنیاز: کارگاه جوشکاري و ورقکاري، علم مواد و نوع درس: تخصصی - الزامی روشهاي ساخت سامانههاي هوافضایی یا هم نیاز
کارگاه موتور و سامانه سوخترسانی هواپیما(Engine and Airplane Fuel System Workshop)تعداد واحد نظري: -تعداد واحد عملی: 1
نوع درس: تخصصی - الزامی پیشنیاز: اصول پیشرانش جت یا هم نیاز
کارگاه سیستمهاي آلات دقیق هواپیما(Aircraft Instrument Shop)تعداد واحد نظري: -تعداد واحد عملی: 1نوع درس: تخصصی - الزامی پیشنیاز: مکانیک پرواز 2 یا هم نیاز
کارگاه اویونیک (Avionic Shop)تعداد واحد نظري: -تعداد واحد عملی: 1نوع درس: تخصصی - الزامی پیشنیاز: کارگاه سیستمهاي آلات دقیق هواپیما
مقدمهاي بر دینامیک سیالات محاسباتی (Introduction to Computational Fluid Dynamics)تعداد واحد عملی: ـ تعداد واحد نظري: 3نوع درس: تخصصی - اختیاري پیشنیاز: محاسبات عددي و آئرودینامیک 2
روشهاي تجربی در آئرودینامیک (Experimental Methods in Aerodynamics)تعداد واحد عملی: - تعداد واحد نظري: 3ننوع درس: تخصصی - اختیاري پیشنیاز: آئرودینامیک 2
آئرودینامیک بالگرد(Helicopter Aerodynamics)تعداد واحد عملی: - تعداد واحد نظري: 3نوع درس: تخصصی - اختیاري پیشنیاز: آئرودینامیک 2
توربوماشینها(Turbomachinery)تعداد واحد عملی: - تعداد واحد نظري: 3نوع درس: تخصصی - اختیاري پیشنیاز: ترمودینامیک 2 و آئرودینامیک 1
اصول پیشرانش موشکی و فضایی(Principles of Rocket and Spacecraft Propulsion)تعداد واحد عملی: - تعداد واحد نظري: 3
نوع درس: تخصصی - اختیاري پیشنیاز: ترمودینامیک 2
سوخت و احتراق(Combustion and Fuel)تعداد واحد عملی: - تعداد واحد نظري: 2نوع درس: تخصصی - اختیاري پیشنیاز: ترمودینامیک 2آزمایشگاه آئرودینامیک 2(Aerodynamics Laboratory II)
تعداد واحد نظري: -تعداد واحد عملی: 1نوع درس: تخصصی - اختیاري پیشنیاز: آئرودینامیک 2
آزمایشگاه مکانیک سیالات(Fluid Mechanics Laboratory)تعداد واحد نظري: -تعداد واحد عملی: 1نوع درس: خصصی - اختیاري پیشنیاز: آئرودینامیک 1
آئرودینامیک وسایل پرنده هوایی(Aircrafts Aerodynamics)تعداد واحد عملی: - تعداد واحد نظري: 3نوع درس: خصصی - اختیاري پیشنیاز: آئرودینامیک 2
موتورهاي احتراق داخلی(Internal Combustion Engines)تعداد واحد عملی: - تعداد واحد نظري: 3نوع درس: تخصصی - اختیاري پیشنیاز: ترمودینامیک 2
مباحث ویژه در مهندسی هوافضا(Selected Topics in Aerospace Engineering )تعداد واحد عملی: - تعداد واحد نظري: 3نوع درس: تخصصی - اختیاري پیشنیاز: ندارد
اویونیک(Avionics)تعداد واحد عملی: - تعداد واحد نظري: 3نوع درس: تخصصی - اختیاري پیشنیاز: مکانیک پرواز 2
آزمایش پرواز(Flight Test)تعداد واحد عملی: - تعداد واحد نظري: 3نوع درس: تخصصی - اختیاري پیشنیاز: مکانیک پرواز 2
ناوبري هوایی(Air Navigation)تعداد واحد عملی: - تعداد واحد نظري: 3نوع درس: تخصصی - اختیاري پیشنیاز: مکانیک پرواز 2
سیستمهاي کنترل خودکار پرواز(Automatic Flight Control Systems)تعداد واحد عملی: - تعداد واحد نظري: 3
نوع درس: تخصصی - اختیاري پیشنیاز: کنترل اتوماتیک و مکانیک پرواز 2
سیستم مدیریت ایمنی و صلاحیت پروازيAirworthiness and Safety Management Systemتعداد واحد عملی: - تعداد واحد نظري: 3نوع درس: تخصصی - اختیاري پیشنیاز: استانداردهاي هوافضایی
مدیریت تعمیر و نگهداري هواپیما(Airplane Maintenance Managment)تعداد واحد عملی: - تعداد واحد نظري: 2
نوع درس: تخصصی - اختیاري پیشنیاز: ندارد
تستهاي غیر مخرب (NDT)تعداد واحد عملی: - تعداد واحد نظري: 2
پیشنیاز: علم مواد و روشهاي ساخت سامانههاي نوع درس: تخصصی - اختیاري
طراحی هواپیما 2(Airplane Design II)تعداد واحد عملی: - تعداد واحد نظري: 3نوع درس: تخصصی - اختیاري پیشنیاز: طراحی هواپیما 1
اصول طراحی بالگرد(Helicopter Design Principles)تعداد واحد عملی: - تعداد واحد نظري: 3نوع درس: تخصصی - اختیاري پینیاز: طراحی هواپیما 1
طراحی سیستمی وسایل پرنده بیسرنشین(Unmanned Aircraft Design)تعداد واحد عملی: - تعداد واحد نظري: 3
نوع درس: تخصصی - اختیاري پیشنیاز: ندارد
طراحی و کاربرد سامانههاي فضایی(Design and application of Space systems)تعداد واحد عملی: - تعداد واحد نظري: 3
نوع درس: تخصصی - اختیاري پیشنیاز: مقدمهاي بر مهندسی هوافضا
طراحی اجزاء 1(Machine Design I)تعداد واحد عملی: - تعداد واحد نظري: 3نوع درس: تخصصی - اختیاري
پیشنیاز : دینامیک یا هم نیاز، مکانیک مصالح 1
و نقشهکشی صنعتی 1
طراحی مکانیزمها(Mechanisms Synthesis and Design)تعداد واحد عملی: ـ تعداد واحد نظري: 3نوع درس: تخصصی - اختیاري پیشنیاز: دینامیک ماشین
مقدمهاي بر روش اجزاء محدود
(An Introduction to Finite Element Method)تعداد واحد عملی: ـ تعداد واحد نظري: 3پیشنیاز: محاسبات عددي و تحلیل سازههاي نوع درس: تخصصی - اختیاري
طراحی اجزاء 2(Machine Design II)تعداد واحد عملی: - تعداد واحد نظري: 3نوع درس: تخصصی - اختیاري پیشنیاز: طراحی اجزاء
دینامیک ماشین(Dynamics of Machines)تعداد واحد عملی: ـ تعداد واحد نظري: 3نوع درس: تخصصی - اختیاري پیشنیاز: دینامیک
مکانیک مدارهاي فضایی(Space Orbits Mechanics)تعداد واحد عملی: - تعداد واحد نظري: 3نوع درس: تخصصی - ختیاري پیشنیاز: ریاضی مهندسی و دینامیک
ریاضی عمومی 1 (Calculus I)تعداد واحد عملی: - تعداد واحد نظري: 3 : دارد نوع درس: پایه پیشنیاز: ندارد
ریاضی عمومی 2 (Calculus II)تعداد واحد عملی: - تعداد واحد نظري: 3 نوع درس: پایه پیشنیاز: ریاضی عمومی 1
معادلات دیفرانسیل (Differential Equations)تعداد واحد عملی: - تعداد واحد نظري: 3 نوع درس: پایه پیشنیاز: ریاضی عمومی 1
برنامهنویسی کامپیوتر(Computer Programming)تعداد واحد عملی: - تعداد واحد نظري: 3نوع درس: پایه پیشنیاز: ندارد
محاسبات عددي (Numerical Calculation)تعداد واحد عملی: - تعداد واحد نظري: 2 پیشنیاز: برنامهنویسی کامپیوتر، معادلات نوع درس: پایه دیفرانسیل یا هم نیاز
فیزیک 1) مکانیک و حرارت) (Physics I: Mechanics and Heat)تعداد واحد عملی: - تعداد واحد نظري: 3نوع درس: پایه پیشنیاز: ندارد
آزمایشگاه فیزیک 1 (Physics I Laboratory)تعداد واحد نظري: -تعداد واحد عملی: 1نوع درس: پایه پیشنیاز: فیزیک 1 یا هم نیاز
فیزیک 2) الکتریسیته و مغناطیس)(Physics II: Electromagnetic)تعداد واحد عملی: - تعداد واحد نظري: 3
نوع درس: پایه پیشنیاز: فیزیک 1
آزمایشگاه فیزیک 2(Physics II Laboratory)تعداد واحد نظري: -تعداد واحد عملی: 1نوع درس: پایه پیشنیاز: فیزیک 2 یا هم نیاز
استاتیک(Statics)تعداد واحد عملی: - تعداد واحد نظري: 3 نوع درس: اصلی - الزامی پیشنیاز: ریاضی عمومی 1 و فیزیک 1 یا هم نیاز
مبانی مهندسی برق(Fundamentals of Electric Engineering)تعداد واحد عملی: - تعداد واحد نظري: 3 نوع درس: اصلی - الزامی پیشنیاز: فیزیک 2
دینامیک(Dynamics)تعداد واحد عملی: - تعداد واحد نظري: 4
نوع درس: اصلی - الزامی پیشنیاز: استاتیک مکانیک مصالح 1
(Mechanics of Materials I)تعداد واحد عملی: ـ تعداد واحد نظري: 3نوع درس: اصلی - الزامی پیشنیاز: استاتیک
ریاضی مهندسی(Engineering Mathematics)تعداد واحد عملی: - تعداد واحد نظري: 3نوع درس: اصلی - الزامی پیشنیاز: ریاضی عمومی 2 و معادلات دیفرانسیل
آزمایشگاه مبانی مهندسی برق(Fundamentals of Electrical Engineering Laboratory)تعداد واحد نظري: -تعداد واحد عملی: 1 نوع درس: اصلی - الزامی پیشنیاز: مبانی مهندسی برق
مقدمهاي بر مهندسی هوافضا(Introduction to Aerospace Engineering)تعداد واحد عملی: - تعداد واحد نظري: 2
نوع درس: اصلی - الزامی پیشنیاز: نداردمکانیک سیالات 1
(Fluid Mechanics I)تعداد واحد عملی: - تعداد واحد نظري: 3 نوع درس: اصلی - الزامی پیشنیاز: استاتیک یا هم نیاز
ترمودینامیک 1
(Thermodynamics I) تعداد واحد عملی: - تعداد واحد نظري: 3نوع درس: اصلی - الزامی پیشنیاز: فیزیک 1 ،معادلات دیفرانسیل یا هم نیاز
ترمودینامیک 2(Thermodynamics II)تعداد واحد عملی: - تعداد واحد نظري: 2 نوع درس: اصلی - الزامی پیشنیاز: ترمودینامیک 1
آزمایشگاه مکانیک مصالح (Mechanics of Materials Laboratory)تعداد واحد نظري: -تعداد واحد عملی: 1نوع درس: اصلی - الزامی پیشنیاز: مکانیک مصالح 1
ارتعاشات مکانیکی(Mechanical Vibrations)تعداد واحد عملی: ـ تعداد واحد نظري: 3نوع درس: اصلی - الزامی پیشنیاز: دینامیک و ریاضی مهندسی
کنترل اتوماتیک(Automatic Control)تعداد واحد عملی: ـ تعداد واحد نظري: 3نوع درس: اصلی - الزامی پیشنیاز: ارتعاشات مکانیکی یا هم نیاز
آزمایشگاه دینامیک و ارتعاشات(Dynamics and Vibrations Laboratory)تعداد واحد نظري: -تعداد واحد عملی: 1نوع درس: اصلی - الزامی پیشنیاز: ارتعاشات مکانیکی و دینامیک
انتقال حرارت 1(Heat Transfer I)تعداد واحد عملی: ـ تعداد واحد نظري: 3نوع درس: اصلی - الزامی پیشنیاز: ترمودینامیک 2 و ریاضی مهندسی
آزمایشگاه ترمودینامیک و انتقال حرارت (Thermodynamic and heat transfer Laboratory)تعداد واحد نظري: -تعداد واحد عملی: 1
نوع درس: اصلی - الزامی پیشنیاز: ترمودینامیک 2 و انتقال حرارت
نقشهکشی صنعتی 1(Industrial Drawing I)تعداد واحد نظري: 1تعداد واحد عملی: 1 نوع درس: اصلی - الزامی یشنیاز: ندارد
کارگاه جوشکاري و ورقکاري(Sheet Metal and Welding Workshop)تعداد واحد نظري: -تعداد واحد عملی: 1نوع رس: اصلی - الزامی پیشنیاز: ندارد
کارآموزي 1(Internship I)تعداد واحد نظري: -تعداد واحد عملی: 1نوع درس: اصلی - الزامی پیشنیاز: گذراندن 65 واحد
نقشه کشی صنعتی 2 (Industrial Drawing II)تعداد واحد نظري: 1تعداد واحد عملی: 1 نوع درس: اصلی - الزامی پیشنیاز: نقشه کشی صنعتی 1
کارآموزي 2 (Internship II)تعداد واحد نظري: -تعداد واحد عملی: 1نوع درس: اصلی - الزامی پیشنیاز: کارآموزي 1
مدیریت و ارزیابی پروژه(Project Management and Evaluation)تعداد واحد عملی: ـ تعداد واحد نظري: 2نوع درس: اصلی - الزامی پیشنیاز: ندارد
آئرودینامیک 1(Aerodynamics I)تعداد واحد عملی: - تعداد واحد نظري: 3نوع درس: تخصصی - الزامی پیشنیاز: مکانیک سیالات 1آئرودینامیک 2(Aerodynamics II)تعداد واحد عملی: - تعداد واحد نظري: 3
نوع درس: تخصصی - الزامی پیشنیاز: آئرودینامیک 1
آزمایشگاه آئرودینامیک 1(Aerodynamic Labratory I)تعداد واحد نظري: -تعداد واحد عملی: 1نوع درس: تخصصی - الزامی پیشنیاز: آئرودینامیک 1
مکانیک پرواز 1(Flight Mechanics I)تعداد واحد عملی: - تعداد واحد نظري: 3نوع درس: تخصصی - الزامی پیشنیاز: آئرودینامیک 1
مکانیک پرواز 2(Flight Mechanics II)تعداد واحد عملی: - تعداد واحد نظري: 3نوع درس: تخصصی - الزامی پیشنیاز: دینامیک و مکانیک پرواز 1کنترل اتوماتیک یا هم نیاز
طراحی هواپیما 1(Airplane Design I)تعداد واحد عملی: - تعداد واحد نظري: 3نوع درس: تخصصی - الزامی پیشنیاز: مکانیک پرواز 2 یا هم نیاز
اصول پیشرانش جت (Principles of Jet Propulsion)تعداد واحد عملی: - تعداد واحد نظري: 3نوع درس: تخصصی - الزامی پیشنیاز: مکانیک سیالات 1 و ترمودینامیک 2
تحلیل سازههاي هوایی(Analysis of Aircraft Structures)تعداد واحد عملی: - تعداد واحد نظري: 3نوع درس: تخصصی - الزامی پیشنیاز: مکانیک مصالح 1
طراحی سازههاي هوافضایی(Aerospace Structures Design)تعداد واحد عملی: - تعداد واحد نظري: 3نوع درس: تخصصی - الزامی پیشنیاز: تحلیل سازههاي هوایی
علم مواد و روشهاي ساخت سامانههاي هوافضایی(Material Science and Aerospace Vehicle Manufacturing Methods)
تعداد واحد عملی: - تعداد واحد نظري: 3پیشنیاز: مکانیک مصالح 1 و مقدمهاي بر مهندسی نوع درس: تخصصی - الزامی
هوافضا
استانداردهاي هوافضایی(Aerospace Standards)تعداد واحد عملی: - تعداد واحد نظري: 2
نوع درس: تخصصی - الزامی پیشنیاز: مقدمهاي بر مهندسی هوافضا
کارگاه سازه و سیستمهاي مکانیکی هواپیما(Airplane Structures and Mechanical Systems Workshop)تعداد واحد نظري: -تعداد احد عملی: 1پیشنیاز: کارگاه جوشکاري و ورقکاري، علم مواد و نوع درس: تخصصی - الزامی روشهاي ساخت سامانههاي هوافضایی یا هم نیاز
کارگاه موتور و سامانه سوخترسانی هواپیما(Engine and Airplane Fuel System Workshop)تعداد واحد نظري: -تعداد واحد عملی: 1
نوع درس: تخصصی - الزامی پیشنیاز: اصول پیشرانش جت یا هم نیاز
کارگاه سیستمهاي آلات دقیق هواپیما(Aircraft Instrument Shop)تعداد واحد نظري: -تعداد واحد عملی: 1نوع درس: تخصصی - الزامی پیشنیاز: مکانیک پرواز 2 یا هم نیاز
کارگاه اویونیک (Avionic Shop)تعداد واحد نظري: -تعداد واحد عملی: 1نوع درس: تخصصی - الزامی پیشنیاز: کارگاه سیستمهاي آلات دقیق هواپیما
مقدمهاي بر دینامیک سیالات محاسباتی (Introduction to Computational Fluid Dynamics)تعداد واحد عملی: ـ تعداد واحد نظري: 3نوع درس: تخصصی - اختیاري پیشنیاز: محاسبات عددي و آئرودینامیک 2
روشهاي تجربی در آئرودینامیک (Experimental Methods in Aerodynamics)تعداد واحد عملی: - تعداد واحد نظري: 3ننوع درس: تخصصی - اختیاري پیشنیاز: آئرودینامیک 2
آئرودینامیک بالگرد(Helicopter Aerodynamics)تعداد واحد عملی: - تعداد واحد نظري: 3نوع درس: تخصصی - اختیاري پیشنیاز: آئرودینامیک 2
توربوماشینها(Turbomachinery)تعداد واحد عملی: - تعداد واحد نظري: 3نوع درس: تخصصی - اختیاري پیشنیاز: ترمودینامیک 2 و آئرودینامیک 1
اصول پیشرانش موشکی و فضایی(Principles of Rocket and Spacecraft Propulsion)تعداد واحد عملی: - تعداد واحد نظري: 3
نوع درس: تخصصی - اختیاري پیشنیاز: ترمودینامیک 2
سوخت و احتراق(Combustion and Fuel)تعداد واحد عملی: - تعداد واحد نظري: 2نوع درس: تخصصی - اختیاري پیشنیاز: ترمودینامیک 2آزمایشگاه آئرودینامیک 2(Aerodynamics Laboratory II)
تعداد واحد نظري: -تعداد واحد عملی: 1نوع درس: تخصصی - اختیاري پیشنیاز: آئرودینامیک 2
آزمایشگاه مکانیک سیالات(Fluid Mechanics Laboratory)تعداد واحد نظري: -تعداد واحد عملی: 1نوع درس: خصصی - اختیاري پیشنیاز: آئرودینامیک 1
آئرودینامیک وسایل پرنده هوایی(Aircrafts Aerodynamics)تعداد واحد عملی: - تعداد واحد نظري: 3نوع درس: خصصی - اختیاري پیشنیاز: آئرودینامیک 2
موتورهاي احتراق داخلی(Internal Combustion Engines)تعداد واحد عملی: - تعداد واحد نظري: 3نوع درس: تخصصی - اختیاري پیشنیاز: ترمودینامیک 2
مباحث ویژه در مهندسی هوافضا(Selected Topics in Aerospace Engineering )تعداد واحد عملی: - تعداد واحد نظري: 3نوع درس: تخصصی - اختیاري پیشنیاز: ندارد
اویونیک(Avionics)تعداد واحد عملی: - تعداد واحد نظري: 3نوع درس: تخصصی - اختیاري پیشنیاز: مکانیک پرواز 2
آزمایش پرواز(Flight Test)تعداد واحد عملی: - تعداد واحد نظري: 3نوع درس: تخصصی - اختیاري پیشنیاز: مکانیک پرواز 2
ناوبري هوایی(Air Navigation)تعداد واحد عملی: - تعداد واحد نظري: 3نوع درس: تخصصی - اختیاري پیشنیاز: مکانیک پرواز 2
سیستمهاي کنترل خودکار پرواز(Automatic Flight Control Systems)تعداد واحد عملی: - تعداد واحد نظري: 3
نوع درس: تخصصی - اختیاري پیشنیاز: کنترل اتوماتیک و مکانیک پرواز 2
سیستم مدیریت ایمنی و صلاحیت پروازيAirworthiness and Safety Management Systemتعداد واحد عملی: - تعداد واحد نظري: 3نوع درس: تخصصی - اختیاري پیشنیاز: استانداردهاي هوافضایی
مدیریت تعمیر و نگهداري هواپیما(Airplane Maintenance Managment)تعداد واحد عملی: - تعداد واحد نظري: 2
نوع درس: تخصصی - اختیاري پیشنیاز: ندارد
تستهاي غیر مخرب (NDT)تعداد واحد عملی: - تعداد واحد نظري: 2
پیشنیاز: علم مواد و روشهاي ساخت سامانههاي نوع درس: تخصصی - اختیاري
طراحی هواپیما 2(Airplane Design II)تعداد واحد عملی: - تعداد واحد نظري: 3نوع درس: تخصصی - اختیاري پیشنیاز: طراحی هواپیما 1
اصول طراحی بالگرد(Helicopter Design Principles)تعداد واحد عملی: - تعداد واحد نظري: 3نوع درس: تخصصی - اختیاري پینیاز: طراحی هواپیما 1
طراحی سیستمی وسایل پرنده بیسرنشین(Unmanned Aircraft Design)تعداد واحد عملی: - تعداد واحد نظري: 3
نوع درس: تخصصی - اختیاري پیشنیاز: ندارد
طراحی و کاربرد سامانههاي فضایی(Design and application of Space systems)تعداد واحد عملی: - تعداد واحد نظري: 3
نوع درس: تخصصی - اختیاري پیشنیاز: مقدمهاي بر مهندسی هوافضا
طراحی اجزاء 1(Machine Design I)تعداد واحد عملی: - تعداد واحد نظري: 3نوع درس: تخصصی - اختیاري
پیشنیاز : دینامیک یا هم نیاز، مکانیک مصالح 1
و نقشهکشی صنعتی 1
طراحی مکانیزمها(Mechanisms Synthesis and Design)تعداد واحد عملی: ـ تعداد واحد نظري: 3نوع درس: تخصصی - اختیاري پیشنیاز: دینامیک ماشین
مقدمهاي بر روش اجزاء محدود
(An Introduction to Finite Element Method)تعداد واحد عملی: ـ تعداد واحد نظري: 3پیشنیاز: محاسبات عددي و تحلیل سازههاي نوع درس: تخصصی - اختیاري
طراحی اجزاء 2(Machine Design II)تعداد واحد عملی: - تعداد واحد نظري: 3نوع درس: تخصصی - اختیاري پیشنیاز: طراحی اجزاء
دینامیک ماشین(Dynamics of Machines)تعداد واحد عملی: ـ تعداد واحد نظري: 3نوع درس: تخصصی - اختیاري پیشنیاز: دینامیک
مکانیک مدارهاي فضایی(Space Orbits Mechanics)تعداد واحد عملی: - تعداد واحد نظري: 3نوع درس: تخصصی - ختیاري پیشنیاز: ریاضی مهندسی و دینامیک