
حقیقت پرواز و چرخش هواپیما
چه چیزی واقعاً به هواپیماها اجازه پرواز می دهد؟من در مورد بحث در مورد فشار به سمت پایین ، استدلال آندرسون ، انکار اصول اشتباه زمان های برابر و نقش بیش از حد تخمینی قضیه برنولی ، من می دانم که یک اعتقاد مشترک وجود دارد که لیفت از اثر برنولی ناشی می شود ، جایی که هوا در حال حرکت روی بالها است تحت فشار کمتری قرار دارد زیرا مجبور است بیش از هوای تحت بال پرواز کند. اما من همچنین می دانم که این اشتباه است ، یا در بهترین حالت کمک جزئی به افزایش واقعی است. مسئله این است که ، هیچ یک از منابع زیادی که اثر برنولی را بی اعتبار می دانند ، توضیح نمی دهد که واقعاً چه اتفاقی می افتد ، بنابراین من تعجب می کنم. چرا هواپیماها واقعاً پرواز می کنند؟ آیا این چیزی است که می تواند در سطحی توضیح داده و یا خلاصه شودبهترین و ساده ترین توضیح من از اندرسون گرفته شده و شامل موارد زیر است
به نوعی هوای رسیدن به لبه اول بال ، پس از تعامل با آن ، رو به پایین است. این باید نتیجه نوعی نیرو باشد ، بنابراین ، برای قانون نیوتن سوم ، باید یک نیروی مخالف از نیروی برابر در جهت مخالف وجود داشته باشد ، که هواپیما را به سمت بالا هل می دهد.
اول: چرا هوا پایین می آید؟ پاسخ: زاویه حمله و شکل ایرفویل ، همراه با استدلال های فشار و رکود ساده. دوم: نقش قضیه برنولی در اینجا کدام است؟ اگر هوا با استفاده از "هندسه" به پایین رانده شود ، ما به تفاوت سرعت بین قسمت بالایی و پایین بال احتیاج نداریم ، آنها این کار را با روشهای مختلف انجام می دهند ، اما مهمترین مشارکتها عبارتند از:
زاویه حمله بال ها ، که با استفاده از کشیدن هوا را به پایین فشار می دهد. این حالت در هنگام برخاستن (فکر کردن هواپیما با بینی بالا به سمت بالا) و نشستن (فلپ) است. هواپیماها نیز به همین ترتیب وارونه پرواز می کنند.
شکل نامتقارن بال ها که هوای عبوری از روی آنها را به جای مستقیم پشت ، به سمت پایین هدایت می کند. این به هواپیماها اجازه می دهد تا بدون داشتن زاویه دائمی روی بالها ، به سطح زمین پرواز کنند.
توضیحاتی که نمای بال را بدون زاویه حمله نشان می دهد نادرست است. بال های هواپیما به صورت زاویه دار متصل می شوند ، بنابراین هوا را به پایین فشار می دهند و شکل ایرفویل به آنها امکان می دهد تا چنین کارآمد و در یک پیکربندی پایدار انجام شوند.
در واقع ، درمورد رایج ترین و پیچیده ترین توضیح است: شروع تعادل گرداب. بحث اصلی این است: به دلیل شرایط کوتا (بدنه ای با لبه دنباله دار تیز که از طریق مایع حرکت می کند ، گردش قدرت کافی برای نگه داشتن نقطه رکود عقب در لبه عقب را ایجاد می کند) گردشی "تزریق" شده توسط استفاده از انتشار چسبناک توسط لایه مرزی تولید شده در نزدیکی ورق هوا ، به جریان اطراف ، در یک پیوستار از گردابهای کوچک شروع می شود. این فویل هوا را ترک می کند و (تقریباً) در جریان ثابت می ماند. این به سرعت از طریق عمل ویسکوزیته تحلیل می رود.
با استفاده از قضیه کلوین ، که در مورد 2D چیزی نیست جز این که گرداب در طول مسیر هر ذره ثابت است ، این چرخش باید با تشکیل "گرداب مقید" مساوی اما مخالف اطراف ورق هوا متعادل شود. این گرداب باعث سرعت بالاتر در بالای بال و سرعت کمتر در زیر آن می شود و باعث بوجود آمدن بالابر با پدیده برنولی می شود.ما فرض می کنیم که گردابی که از دیواره خارج می شود (شرایط بدون لغزش باعث می شود که دیواره ایرفویل ورقه ای از گرداب بی نهایت باشد) با انتشار ، لایه مرزی را ترک کرده و در منطقه ای وارد شود که تعداد رینولدز به اندازه کافی بالا باشد و به ما اجازه دهد معادله اولر و سپس قضیه کلوین (که فقط برای مایعات نامشخص معتبر است). من این را معمولاً با استفاده از معادله گرداب ، که یک نسخه محلی (در 2D) از قضیه کلوین است ، توضیح می دهم:
$\partial_t\omega+\boldsymbol u \cdot \nabla \omega=\nu \nabla^2 \omega$
در لایه مرزی گرانروی ترم غالب است ، در حالی که در لایه خارجی می توان آن را نادیده گرفت. هنگامی که گردابه به لایه خارجی می رسد ، گرداب حفظ می شود و می توان گفت که ساختارهایی که از لایه مرزی می رسند باید توسط مایعات موجود در این منطقه متعادل شوند (از نظر گردابه). و ما فقط می توانیم این کار را انجام دهیم زیرا گردش خون ، که ثابت واقعی است ، یک خط انتگرال است و اگر از ناحیه ایرفویل / BL عبور نکنیم ، هیچ مشکلی نداریم. آیا این درست است؟
به نظر می رسد در این توضیح قضیه برنولی یک علت است که باعث ایجاد لیفت از طریق اختلاف سرعت می شود. آیا این درست است؟
شما می توانید هواپیمایی بسازید که بدون اشکال "ایرفویل" پرواز کند. شما می توانید هواپیمایی بسازید که با بالهای کاملاً صاف مستطیلی ساخته شده از تخته سه لا پرواز کند. نکته مهم زاویه حمله بالها به هوا خواهد بود. یک تکه چوب صاف مانند تخته سه لا در نظر بگیرید. آن را از طریق هوا دقیقاً در جهتی به موازات ابعاد مسطح خود بفشارید و هیچ لیفتی ایجاد نمی کند.
از نظر اختلاف حرکت بین هوای ورودی و شستشوی متولد شده توسط بال دقیقاً همان فیزیک همان توصیفات "محبوب تر" است که از نظر معادله برنولی و ادغام فشار در اطراف بال. به راحتی می توان فهمید: معادله Navier-Stokes ، یک کاربرد بسیار ساده است و چیزی بیش از قانون دوم و سوم نیوتن در حجم کم مایعات نیست ، چنین ایده ساده ای که به راحتی درک می شود و با طعنه فقط تجسم قوانین نیوتن است ، . معادله ناویر استوکس حالت پایدار برای یک سیال کامل و غیرقابل فشرده است (در اینجا میدان سرعت حالت پایدار و میدان فشار اسکالر است):$(\vec{v}\cdot \nabla) \vec{v} = \nabla \left(\frac{|\vec{v}|^2}{2}\right) + \nabla\wedge(\nabla\wedge\vec{v}) = -\nabla p$که $\nabla\left(p + \frac{|\vec{v}|^2}{2}\right) = 0$ یا $p + \frac{|\vec{v}|^2}{2} = \text{const}$ را برای یک جریان تحریک ناپذیر$\nabla\wedge\vec{v} = \vec{0}$ هنگامی که در امتداد منحنی انتگرال $\vec{v}$ ، به عنوان مثال یکپارچه می شود ، می دهد. یا ، در عوض ، ما می توانیم در اولین حالت ساده تر در این مورد ساده استدلال کنیم: نیرو در یک حجم بی نهایت کم$-\nabla p$ است و شتاب یک ذره در جریان با استفاده از فرمول های Serret-Frenet (در اینجا s طول قوس در امتداد جریان از طریق ذره و κ انحنای مسیر است):$\mathrm{d}_t (v \hat{\mathbf{t}}) = \mathrm{d}_s v \times \mathrm{d}_t s\, \hat{\mathbf{t}} + v\,\mathrm{d}_s(\hat{\mathbf{t}})\,\mathrm{d}_t s=v\,\mathrm{d}_s v, \hat{\mathbf{t}} - \kappa\,v^2\,\hat{\mathbf{n}}=\mathrm{d}_s \left(\frac{v^2}{2}\right)\, \hat{\mathbf{t}} - \kappa\,v^2\,\hat{\mathbf{n}}$
با استفاده از$\vec{F} = m \vec{a} \Rightarrow -\nabla p \,\mathrm{d}x\,\mathrm{d}y\,\mathrm{d}z = \rho\,\vec{a}\,\mathrm{d}x\,\mathrm{d}y\,\mathrm{d}z$به دست می آوریم:
$-\nabla p = \rho \left(\mathrm{d}_s \left(\frac{v^2}{2}\right)\, \hat{\mathbf{t}} - \kappa\,v^2\,\hat{\mathbf{n}}\right)$
که مجدداً $p + \frac{|\vec{v}|^2}{2} = const$را هنگامی که در امتداد یکپارچه ادغام می شود ،نتیجه میده (در اینجا می توانیم نیروی جانبی متمرکز (طبیعی برای ساده سازی)$-v^2\,\hat{\mathbf{n}} / R$ را که توسط فرمول $v^2/R$ نشان داده بنابراین می توانیم، برای مثال ، قضیه بلازیوس را برای محاسبه آسانسور اعمال کنیم و مطمئن باشید که این فقط مقداری از ایده Sklivv نیست که "هواپیماها هوا را به سمت پایین می رانند ، بنابراین هوا هواپیماها را بالا می برد". اختلاف فشار بین سطح بالا و پایین یک بال وجود دارد زیرا بال هوا را به پایین فشار می دهد ، نه یک پدیده جداگانه. غالباً می شنوید که اصل برنولی که در بال استفاده می شود اشتباه است: این درست نیست. همانطور که توسط آزمایش نشان داده شده است (و با تکان دادن دست ، از طریق تئوری) در تظاهرات برنده آسانسور با استفاده از اصل برنولی مغالطه ای وجود دارد ، اما این ایده اساساً درست است ، زیرا باید از اشتقاق آن از معادله ناویر-استوکس و قوانین نیوتن که من گفتم
محاسبه ایروفیل Joukowsky و خطاها در کاربرد برنده اصل برنولی در بالها
ما به محاسبه دو بعدی آسانسور با استفاده از اصل برنولی یا معادل آن ، با استفاده از قضیه Blasius نگاه می کنیم. تصور غلط رایج در اینجا این است که جریان هوا در لبه بال بال شکسته می شود و دو ذره همسایه به طور همزمان به لبه عقب بال می رسند ، بنابراین ذرات بالایی باید با سرعت بالاتر از سطح منحنی عبور کنند و بنابراین فشار روی سطح بال بال کمتره. در واقع ، ذرات مسیر فوقانی خیلی بیشتر از این توضیحات تسریع می شوند ، به لبه عقب بال می رسند. . این واقعیت نشان می دهد که گردش $\oint_\Gamma \vec{v}\cdot\mathrm{d}\vec{r}$ در اطراف سطح بال بال G غیر صفر است ، واقعیتی که به طور مستقیم از تئوری ساده انتظار داریم.
فشار بالایی (فشار منفی) در بالای بال وجود ندارد ، آیا جریان هوا به سمت پایین حرکت می کند؟ بدیهی است که به سمت پایین حرکت نخواهد کرد. بالابر بال از فشار کم در بالای بال و فشار زیاد در پایین بال ایجاد می شود. حرکت به سمت پایین جریان هوا فقط نتیجه فشار زیاد و کم است. چرا بالای بال فشار کم دارد؟ زیرا جریان هوا تمایل دارد تا در جهت طبیعی بال حرکت کند. چرا پایین بال بالا است؟ زیرا جریان هوا در راستای جهت عادی بال متمایل می شود. جهت حرکت جریان هوا
فعل و انفعالات سیالات با اجسام جامد به خصوصیات سیال و هندسه جسم بستگی دارد. در مورد هواپیما ، ما هوا را به عنوان مایعات و هندسه هوای فویل داریم. هندسه ایروفویل به طور هدفمند طراحی شده است تا مایعات را ترجیحاً بالای آن مجبور کند. این منجر به اختلاف فشار می شود و سپس منجر به ایجاد نیروی شنا می شود که طبق قانون دوم نیوتن بالابر را تسریع می کند. قانون برنولی برای محاسبه مشکل مایعات مرتبط است.
بنابراین ، برای دستیابی به پرواز ، تنها چیزی که به شما احتیاج دارد ایروفیل با طراحی مناسب و راهی برای انتقال سرعت اولیه است. برای ادامه پرواز باید سرعت خود را بالا نگه دارید و برای داشتن پرواز پایدار به یک هواپیمای کاملاً طراحی شده با مرکز جرم ، مرکز رانش و مرکز بالابر در همان موقعیت نیاز دارید.به دلیل انسداد بال ، هوا باید به دور بال بچرخد ، بنابراین فشار هوا در پایین بال افزایش می یابد زیرا هوای پایین بال فشرده می شود تا دور بال را بچرخد ، و هوا در قسمت بالای بال به دور بال کشیده می شود ، بنابراین فشار هوا در قسمت بال بال کاهش می یابد. بنابراین یک اختلاف فشار وجود دارد ، و سپس یک بالابر وجود دارد. توجه: قسمت پایین بال بادگیر است ، بنابراین هوا فشرده می شود ، فشار زیاد است و قسمت بالایی آن به سمت پایین است ، بنابراین هوا کشیده می شود و فشار کم است. بنابراین لیفت را نمی توان با قضیه برنولی توضیح داد. زیرا قضیه برنولی فشرده سازی و کشش مایع را در نظر نمی گیرد.
فشرده سازی و کشش
به عنوان مثال ، در بالای بال ، جهت سرعت هوا در نقطه A جهت پیکان آبی است. از آنجا که پیکان آبی مایل است (به زاویه بین پیکان آبی و آبی عادی در تصویر توجه کنید) ، پیکان آبی تمایل دارد که از بال در امتداد جهت عادی بالای بال فاصله داشته باشد ، بنابراین فشار هوا در بالای بال کشیده شده است ، بنابراین فشار هوا در بالای بال کاهش می یابد ، بنابراین اختلاف فشار وجود دارد (شیب فشار). این اختلاف فشار جهت سرعت هوا را تغییر می دهد ، بنابراین جهت سرعت هوا در نقطه B جهت فلش قرمز است و فلش قرمز نیز مایل است .... بنابراین جهت سرعت هوا در امتداد بالای بال لازم به ذکر است که این اختلاف فشار نه تنها جهت سرعت هوای بالای بال را تغییر می دهد بلکه باعث بالابردن بال می شود.
چرا هوا از قسمت بالای ایر فویل سریعتر جریان می یابد؟وقتی هوا به قسمت بال بال برخورد می کند ، در یک منحنی تندتر به سمت بالا جریان پیدا می کند ، تا جریان بال پایین ، این یک خلا در بالای بال ایجاد می کند ، و این باعث جذب هوای بیشتر به سمت بال بال می شود ، این هوا همان کار را می کند اما به دلیل ایجاد خلا در داخل ، سریعتر حرکت می کند و البته خلا بال را بلند می کند.واقعاً خیلی ساده است. وقتی هوا به ناحیه ای با فشار کم جریان می یابد ، سرعت آن کاهش سرعت غلتکی است - به ناحیه فشار کم مکیده می شود! و هنگامی که وارد فشار شدید می شود ، سرعت حرکت آن مشابه سرعت بالا رفتن غلتک است. وقتی اصطکاک بین خطوط جریان وجود نداشته باشد ، تنها راهی که سرعت جریان می تواند تغییر کند از طریق این شتاب و کاهش سرعت است. هوای وارد شده به منطقه کم فشار در بالای بال سرعت می گیرد. هوای وارد شده به ناحیه فشار بالا در پایین آهسته می شود. به همین دلیل هوای بالا سریعتر حرکت می کند.
این منجر به انحراف هوا به سمت پایین می شود ، که برای تولید بالابر به دلیل حفاظت از حرکت لازم است (که این یک قانون واقعی فیزیک است). برای اینکه هوا به سمت پایین منحرف شود ، ضروری است که هوا از بالا با سرعت بیشتری حرکت کند ، اما با این وجود توضیحی در مورد چگونگی حرکت سریع هوا در قسمت بالا نیست ، بلکه صرفاً توضیحی است که چرا ما می خواهیم.
توضیحات متداول در مورد آسانسور این کار را به عقب انجام می دهد - فرض بر این است که جریان بالاتری از قسمت بالای فویل هوا ، با استفاده از یک قانون نادرست از زمان عبور مساوی برای توجیه این موضوع ، سپس از رابطه برنولی بین سرعت و فشار برای توضیح فشار کم و بالابر استفاده می کند.
اکنون که می دانید چه عواملی باعث چرخش هواپیما می شود ،
پاسخ این است: "با آیلرون ها".
کج کردن کل نیروی بالابر در حالی که به نوبه خود به معنای لیفت کمتری است که می تواند برعکس وزن هواپیما عمل کند هواپیما با حرکت در جهت نیروی لحظه ای بزرگتر - به سمت پایین ، در جهت وزن پاسخ می دهد. ما هر زمان که وارد یک پیچ می شویم با افزایش اندکی بالابر خود این میزان را جبران می کنیم. این کار با وارد کردن کمی فشار عقب بر روی جوی استیک انجام می شود (این فشار برگشتی به جوی استیک است ، . که فشار برگشت زاویه حمله بال را افزایش می دهد و در نتیجه بال بال اندکی افزایش می یابد. متأسفانه ، این افزایش زاویه حمله ، کشش را نیز افزایش می دهد که باعث کند شدن هواپیما می شود. در پیچ کم عمق (حدود 30 درجه یا کمتر) ، این کاهش سرعت نگران کننده نیست. چرخش های تندتر (45 درجه یا بیشتر) ممکن است به قدرت اضافه شده برای جلوگیری از کاهش بیش از حد سرعت هوا نیاز داشته باشد.
محورﻫﺎی ﺣﺮﮐﺘﯽ ﻫﻮاﭘﯿﻤﺎ :یک هواپیما علاوه بر حرکاتی که یک اتومبیل می تواند انجام دهد ، دارای حرکات کنترل شده دیگری نیز است که در زیر به طور مختصر با آن آشنا می شویم. ﺣﺮﮐﺖﺣﻮل ﺳﻪ ﻣﺤﻮر ﻣﺨﺘﻠﻒ ﻫﻮاﭘﯿﻤﺎ، از ﻃﺮﯾﻖ ﺳﻄﻮح ﮐﻨﺘﺮﻟﯽ ﺧﺎﺻﯽ ﮐــﻪ ﯾـﮏ ﺧﻠﺒـﺎن ﺗﻮﺳـﻂ اﻫﺮم ﻫﺪاﯾﺖ ﻫﻮاﭘﯿﻤﺎ آن را ﮐﻨﺘﺮل ﻣﯽ ﮐﻨﺪ اﻣﮑﺎن ﭘﺬﯾﺮ اﺳﺖ.
محور های حرکتی هواپیما
حرکت چرخش (ROLL):
ﺣﺮﮐﺘﻬﺎی ﺣﻮل ﻣﺤﻮر ﭼﺮﺧﺶﯾﺎ رول ﻫﻮاﭘﯿﻤﺎ از ﻃﺮﯾﻖ (AILERONS) ﺑﺎﻟﻬﺎی ﻫﻮاﭘﯿﻤﺎ اﻧﺠﺎم ﻣــﯽ ﺷـﻮد . آﻧﻬﺎ ﺑﺎﻋﺚ ﻣﯽ ﺷﻮﻧﺪﮐــﻪ ﻫﻮاﭘﯿﻤﺎ ﺑﻪ دور ﺟﻬﺘــﯽ ﮐﻪ دﻣﺎﻏﻪ ﻫﻮاﭘﯿﻤــﺎ ﺑـﻪ آن اﺷـﺎره ﻣـﯽﮐﻨـﺪ، ﺑﭽﺮﺧﺪ. اﯾﻦ ﺣﺮﮐﺖ، ﭼﺮﺧﺶ و ﯾﺎ ﺑﻪ اﺻﻄﻼح (ROLL) ﻧﺎﻣﯿﺪه ﻣﯽ ﺷﻮد ﮐﻪ اﻟﺒﺘﻪ ﻧﺒﺎﯾﺪ آن را ﺑﺎ ﺣﺮﮐــﺖ دور زدن ﻫﻮاﭘﯿﻤﺎ ﺑﺮ روی زﻣﯿﻦ، اﺷﺘﺒﺎه ﮔﺮﻓﺖ . ﺑﺮای ﺣﺮﮐﺖ ﻫﻮاﭘﯿﻤﺎ ﺣﻮل ﻣﺤﻮر ﭼﺮﺧﺶ ﯾﺎ (ROLL) ، ﺧﻠﺒﺎن اﻫﺮم ﻫﺪاﯾﺖﻫﻮاﭘﯿﻤﺎ را در ﺟﻬﺖ ﭼﺮﺧﺶ ﻣﻮرد ﻧﻈﺮ ﺣﺮﮐﺖ ﻣﯽ دﻫــﺪ ﮐﻪ ﻣﯽ ﺗﻮاﻧﺪ ﺑﻪ ﺳﻤﺖ ﭼﭗ ﯾﺎ راﺳﺖ ﺑﺎﺷﺪ.
حرکت حول محور عمودی (YAW):
ﭼﺮﺧﺶ ﺣﻮل ﻣﺤﻮر ﻋﻤﻮدی ﻫﻮاﭘﯿﻤﺎ اﻧﺤﺮاف از ﻣﺴﯿﺮ ﯾﺎ (YAW) نـﺎﻣﯿﺪه ﻣـﯽ ﺷـﻮد و ﺗﻮﺳـﻂ ﺳـﮑﺎن ﻣﺘﺤﺮک ﻋﻤﻮدی دم ﻫﻮاﭘﯿﻤﺎ ﯾﺎ (RUDDER) ﮐﻨﺘﺮل ﻣﯽ ﺷﻮد. ﻫﻤﺎﻧﻄﻮر ﮐــﻪ ﻣﺎﺷـﯿﻦ ﻧﺴـﺒﺖ ﺑـﻪﺣﺮﮐـﺖ ﻓﺮﻣﺎﻧﺶ ﻋﮑﺲ اﻟﻌﻤــﻞﻧﺸﺎن ﻣﯽ دﻫﺪ ﯾﮏ ﻫﻮاﭘﯿﻤﺎ نـﯿﺰ ﺑﻼﻓﺎﺻﻠـﻪ ﻧﺴـﺒﺖ ﺑـﻪ ﺣﺮﮐـﺖ ﺳـﮑﺎن ﻋﻤﻮدی ﻣﺘﺤﺮک ﻋﮑﺲ اﻟﻌﻤﻞﻧﺸﺎن ﻣﯿﺪﻫﺪ و ﺣﺘﯽ ﻫﻮاﭘﯿﻤﺎ ﺑﺎز ﻫﻢ ﺑﯿﺸﺘﺮ ﺷﺒﯿﻪ ﺑﻪ ﯾﮏ ﻣﺎﺷـﯿﻦ ، از ﻃﺮﯾﻖ اﯾﻦ ﺳﮑﺎن ﻫﻨﮕﺎﻣﯽ ﮐﻪ روی زﻣﯿــﻦ اﺳﺖ ﻫﺪاﯾﺖ ﻣﯽ ﺷﻮد. در ﻫﻮاﭘﯿﻤﺎﻫﺎی ﺟﺪﯾﺪ، (RUDDER) ﺑـﺎ ﭼﺮﺧﻬﺎی ﻗﺎﺑﻞ ﮔﺮدش ﻫﻮاﭘﯿﻤﺎ ﻣﺮﺗﺒﻂ ﻣﯽ ﺑﺎﺷﺪ. ﺑﻪ ﻋﻨﻮان ﻣﺜﺎل ﺣﺮﮐﺖ (RUDDER) ﺑﻪ ﺳﻤﺖ ﭼﭗ ﺑﺎﻋﺚ دور زدن ﻫﻮاﭘﯿﻤﺎ ﺑﻪ ﺳﻤﺖ چـﭗ ﻣـﯽ ﺷـﻮد و ﮐﺎﻣﻼ" ﻣﻨﻄﻘﯽ اﺳﺖﮐﻪ ﺣﺮﮐﺖ (RUDDER) ﺑﻪ ﺳﻤﺖ راﺳﺖ ﺑﺎﻋﺚ دور زدن ﺑﻪ ﺳﻤﺖ راﺳﺖﺷﻮد.
حرکت حول محور عمودی (YAW)
حرکت حول محور عرضی (PITCH)
حرکت حول محور عرضی (PITCH):
ﺣﺮﮐﺖ ﺣﻮل ﻣﺤﻮرﻋﺮﺿﯽﻫﻮاﭘﯿﻤﺎ ﯾﺎ (PITCH) ، ﺑﻪ ﻫﻮاﭘﯿﻤﺎ اﯾﻦ اﺟﺎزه را ﻣﯿﺪﻫﺪ ﺗﺎ ﺑﻪﺳﻤﺖ ﭘﺎﯾﯿﻦ و ﯾﺎ ﺑـﻪ ﺳﻤﺖ ﺑﺎﻻ ﭘﺮواز ﻧﻤﺎﯾﺪ. اﯾﻦ ﺣﺮﮐﺖ ﺑﻪ ﻧﺎم ﺣﺮﮐﺖ (PITCH) ﺷﻨﺎﺧﺘﻪ ﻣﯽ ﺷﻮد و توسط (ELEVATORS) تعبیه شده بر روی بالچه های کوچک عقب (HORIZONTAL STABILIZER) قابل کنترل است. ﻫﻨﮕﺎﻣﯽ ﮐﻪ اﻫﺮم ﻫﺪاﯾﺖ ﻫﻮاﭘﯿﻤﺎ را ﺑـﻪ ﺳﻤﺖﻋﻘﺐ ﺑﮑﺸﯿﺪ، ﻫﻮاﭘﯿﻤــﺎ ﺑﻪ ﺳﻤﺖ ﺑﺎﻻﺣﺮﮐﺖ ﺧﻮاﻫﺪ ﮐﺮد و ﻫﻨﮕﺎﻣﯽ ﮐـﻪ آن را ﺑﻪ ﺳﻤﺖ ﺟﻠﻮ ﻓﺸﺎر دﻫﯿﺪ، ﻫﻮاﭘﯿﻤﺎ ﺣﺮﮐﺘﯽ ﺑﻪ ﺳﻤﺖ ﭘﺎﯾﯿﻦ ﺧﻮاﻫﺪ داﺷﺖ.هر دو بال هواپیمایی که در حالت پرواز مستقیم است نیروی Lift (برا) مساویی وارد میشود در غیر این صورت هیچ هواپیمایی قادر به پرواز مستقیم نبود و هواپیما در جهت بالی که نیروی lift کمتری به آن وارد می شد دائما گردش می کرد. هواپیماها با استفاده از این ویزگی (اختلاف نیری برآ دو بال) گردش میکنند اما چگونه؟ همان طور که گفتیم به دو بال هواپیماها در حالت پرواز مستقیم نیروهای lift یکسانی وارد می شود در نتیجه خلبانی که قصد تغییر مسیر دارد باید این نیرو هارا در یک بال کم ودر بال دیگر به همان اندازه زیاد کند این کار با استفاده از Ailerons (شهپرها) یی که در انتهای بال ها قرار دارد انجام می شود مثلا هواپیمایی را در نظر بگیرید که قصد چرخش به سمت راست را دارد در این هنگم خلبان باید فرامین کنترل هواپیما را به سمت راست بچرخاند این کار باعث می شود که شهپر بال راست بالا بی اید و باعث کاهش نیروی lift برو بال راست شود و در مقابل شهپر بال چپ به همان اندازه پایین می رود و باعث افزایش نیروی lift بر روی بال چپ می شود در این صورت است که کجی یا Bank اتفاق می افتدرهام حسامی دانشجوی ترم هفتم مهندسی هوافضا
هوافضا
-
rohamavation

نام: roham hesami radرهام حسامی راد
محل اقامت: 100 مایلی شمال لندن جاده آیلستون، لستر، لسترشر. LE2
عضویت : سهشنبه ۱۳۹۹/۸/۲۰ - ۰۸:۳۴
پست: 3278-
سپاس: 5494
- جنسیت:
تماس:
-
rohamavation
نام: roham hesami radرهام حسامی راد
محل اقامت: 100 مایلی شمال لندن جاده آیلستون، لستر، لسترشر. LE2
عضویت : سهشنبه ۱۳۹۹/۸/۲۰ - ۰۸:۳۴
پست: 3278-
سپاس: 5494
- جنسیت:
تماس:
Re: هوافضا
بیش از 128 میلیون قطعه اسپیس دبریس در اربیت وجود داره اگه من بگم هر شی به اندازه 1 سانتی متر مربع مساحت کل اشیاء موجود در فضا این را تا 1 کیلومتر مربع گرد اوری کنم با مساحت زمین 510 میلیون بنابراین نسبت کل اربیت اشغال شده توسط اسپیس دبریس حداکثر 1 در 510 میلیون است.من گفتم ایده تور -ایده فیلد مغناطیسی و ایده هوک -ا خودم گفتم رهام نگاتیو پرشر هم میشه نگاتیو پرشر به طور کلی که پرشر در یک مکان نسبت به مکان دیگر کمتر باشه.سیستمهای نگاتیو پرشر معمولاً برای کشیدن مواد از چندین منبع به یک نقطه استفاده میشن هر چندوقتی که ایر دانسیته خیلی کم میشه معادله اولیه برنولی (بهجای عبارت آنتالپی با عبارت پرشر) دقیق نیست. در هر صورت، هوا و سایر گازها نمی توانند نگاتیو پرشر داشته باشن بنابراین p<0 اتفاق نمی افته.حذف ماده از ناحیه ای از فضا با ایجاد خلاء منجر به پرشر صفر در آنجا میشه نه نگاتیو پرشر. پس ماده ای که در مجاورت خلاءهست نتیجه پرشر کمتری 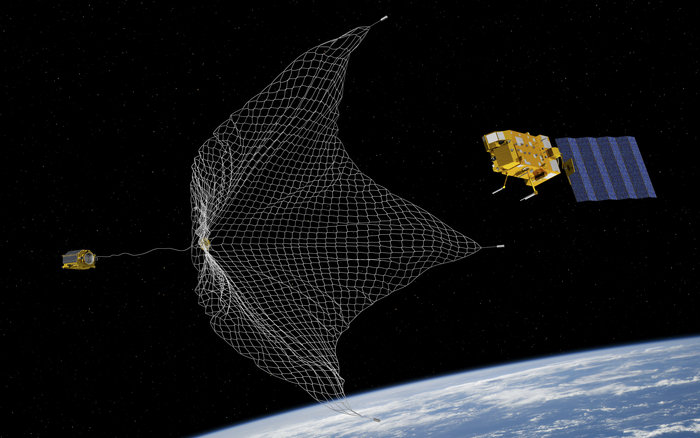 ایجاد میکنه امانگاتیو پرشر ایجاد نمیکنه ایده من از ورتکس گرفتم ایده ورتکس در فضا اگر معادلات اویلر یک بعدی اینکمپرسیبل را در نظر بگیریم (اصولاً F=ma اما برای فلوید بدون ویسکوزیته) معادله به نظر میرسه
ایجاد میکنه امانگاتیو پرشر ایجاد نمیکنه ایده من از ورتکس گرفتم ایده ورتکس در فضا اگر معادلات اویلر یک بعدی اینکمپرسیبل را در نظر بگیریم (اصولاً F=ma اما برای فلوید بدون ویسکوزیته) معادله به نظر میرسه
$\frac{\partial u}{\partial t} + u\frac{\partial u}{\partial x} = -\frac{1}{\rho}\frac{\partial p}{\partial x}$
سمت چپ اکسلریشن یک توده کوچک مایع و سمت راست فورس تقسیم بر جرمه. از آنجایی که گفتم این غیر استیکی هست فقط پرشرگرادیان وجود داره
علامت منفی در جلوی پرشرگرادیان یعنی که اکسلریشن وکتور در جهت مخالف وکتور پرشر گرادیان. گرادیان وکتور از کم به زیاد می روند و بنابراین اکسلریشن در جهت های پرسر به لو پرشر است.
هسته یک ورتکس به طور کلی یک حداقل پرشر (اگرچه ویسکوزیته کمی تغییر می کنه بنابراین فورس از بیرون ورتکس به داخل ورتکس وارد میشه. این کاملاً بر اساس میزان پایین بودن پرشر در داخل ورتکس نسبت به خارجه . ایده کلرینگ اسپیس دبریس شامل به حرکت درآوردن تودهای از گازهای جوی که در مسیر اسپیس دبریس قرار دارن به طوری که اسپیس دبریس هنگام عبور با ستون گازی برخورد میکنند. افزایش تنشن اتمسفر از گس پارتیکلز ستون در مسیردبریس مانع از انتشاراسپیس دبریس به سمت جلو میشه و به تدریج اسپیس دبریس را کاهش میده این روشی کلرینگ دبریس در اربیت پایین زمین (LEO) هست ببینید ورود گس پارتیکلز به مسیردبریس رزیستنس اتمسفر یا تنشن اتمسفر را که دبریس از آن عبور می کنند افزایش میده به طوری که به تدریج اجسامی که از توده عبور می کنند کاهش میده. از آنجایی که اربیت که ذره ای از اسپیس دبریس در آن حرکت می کند به طور کلی با اربیتال اسپید ذره ارتباط نزدیکی داره حتی یک کاهش کوچک در سرعت ناشی از افزایش پارتیکلز جو در مسیر دبریس می تواند برای سوئیچ کردن دبریسکافی باشه. به اربیت پایینتری میره و در نهایت منجر به کلرینگ اتمسفراز دبریس میشه. دبریس اربیت ژئوسنکرون
با توجه به روش اولم روشی برای کلرینگ اسپیس دبریس از اربیت زمین شامل پراکندگی یک ماده اکسپلوسیو گازی برای هدایت یک توده گازی به مسیر اسپیس دبریس . این روش همچنین شامل برانگیختن اکسپلوژن از شارژ شکل است،
در نتیجه باعث میشه که توده گازی در مسیر اسپیس دبریس اینجکشن بشه تا اسپید اربیت اسپیس دبریس کاهش یابد و اسپیس دبریس دوباره وارد جو زمین شوند. ستون گازی به حجمی از مواد یا گس پارتیکلز، معمولاً کمپرسدایر، اشاره دارد که به سمت بالا به سمت فضا حرکت می کنند.
ماده اکسپلوسیو گازی شامل یک ماده اکسپلوسیو ایر فیول است. یک ماژول کنترل یک ماشه اکسپلوژن بار شکل گازی را نسبت به محل اسپیس دبریس تارگت ضرب میکنه به طوری که اسپیس دبریس با ستون گازی برخورد میکنن "ماژول" شامل هر ترکیبی از نرمافزار، سختافزار، سفتافزار، یا رسانههای قابل خواندن کامپیوتر است که دستورالعملهای اجرایی کامپیوتری را ذخیره میکند تا پردازنده را وادار به انجام مراحل تعریفشده توسط آن دستورالعملها کند. در یک روش ستون گازی به گونهای کانفیگوریشن شده است که گس پارتیکلز برای مدت زمان محدودی در مسیر اسپیس دبریس باقی میمانند تا باعث کاهش سرعت حجم هدفی از اسپیس دبریس شود که از توده گازی در طول دوره محدود عبور میکنند. زمان. بازه زمانی محدود می تواند از کمتر از چند ثانیه تا چند دقیقه بسته به مثلاً دانسیته اسپیس دبریسفیلد مورد نظر، اندازه پارتیکلز دبری که باید پاک شوند و اسپید اربیت اسپیس دبریس متغیر باشد.
با توجه به روش دوم طرحم سیستمی برای کلرینگ اسپیس دبریس از اربیت زمین شامل یک ژنراتور ورتکس برای به حرکت درآوردن ورتکس از توده گازی به سمت مسیر اسپیس دبریس در نتیجه باعث میشه که توده گازی در مسیر حرکت اسپیس دبریس اینجکشن بشه اسپیس دبریس برای کلرینگ اسپیس دبریس. ورتکس به یک روتیشن یک اسپایرل یا یک جریان روتیشن فلوید در اطراف مرکز روتیشن اشاره داره سیال شامل گس پارتیکلز جوی هست. توده هوای چرخان یا در حال روتیشن می تواند اشکال مختلفی داشته باشد از جمله بدون هیچ محدودیتی به شکل اسپایرل ستون یا اسپایرل ورتکس به طور کلی با بیرون راندن فلوید از طریق یک دهانه کوچک ایجاد میشه که ممکن است به صورت فیزیکی یا از طریق عمل یک اکسپلوژن شکل در یک ژنراتور ورتکس ایجادبشه به دلیل نحوه روتیشن فلوید (یعنی برای حفظ ورتکس اولیه)، یک ورتکس می تواند برای مسافت نسبتاً طولانی قبل از اینکه توسط کشش در محیط حرکت پراکنده بشه منتشر بشه در طرح من ورتکس با رانش ایر کامپرسد از طریق یک دهانه به شکل مناسب مانند یک مخروط با انتهای بازایجاد میشه در یاورتکس با ایجاد یک اکسپلوژن در زیر یک سوراخ در استراکچر شکل ایجاد میشه
یک ژنراتورورتکس یک ورتکس رینگ تولید میکنه که معمولاً از اکسپلوژن استیلن-هوا یا هیدروژن-اکسیژن برای به حرکت درآوردن ستون گازی استفاده میشه. این سیستم شامل یک سکوی شناور (به عنوان مثال، یک بالون در های التیتیود ) برای حفظ ژنراتورورتکس در التیتیود اپریشن از سطح زمین و یک دستگاه تارگت برای تارگت قرار دادن ژنراتور ورتکس به طور قابل ملاحظه ای متعامد به مسیر اسپیس دبریس هایت اپریشن میتونه هر التیتیود ساب اوربیتال مناسبی باشه و معمولاً برای کاهش تنشن اتمسفر روی ورتکس انتخاب میشه. ببینید ژنراتور ورتکس یک تفنگ حلقهای ورتکس پرقدرته که به گونهای ساخته شده است که باعث شود توده گازی به مزوسفر نفوذ کرده و وارد ترموسفر بشه ژنراتور ورتکس با ایجاد یک اکسپلوژن بار اکسپلوژن انرژی میگیره. گازهایی که برای فعال کردن ورتکس به حرکت در می آیند را می توان از استراتوسفر جمع آوری کرد.
کاهش سرعت دبریس عمدتاً با افزایش مقدار گس پارتیکلز جوی ایجاد میشه که مسیر اسپیس دبریس را مسدود میکنه. بنابراین، برای افکتیو بودن، ستون فقط باید با انرژی کافی اینجکشن میشه تا فقط جرم کافی از گس پارتیکلز را در مقابل اسپیس دبریس قرار بده.مدولاسیون اتمسفر، بر خلاف دایرکت ایمپکت یا دایرکت فورس ناشی از یک اکسپلوژن در اربیت میتونه منجر به کاهش بیشتر در مصرف انرژی بشه، زیرا ستون فقط باید با انرژی کافی برای رسیدن به التیتیود تارگت خود حرکت داده بشه تا افکتیو باشه . در یک روش من ستون را می توان با انرژی کافی کانفیگوریشن کرد به طوری که با انرژی باقیمانده کافی به تارگت اربیت برسه تا ایمپکت به اسپیس دبریس که با ستون برخورد می کنند ایجاد کنه.
استفاده از گاز اتمسفر که از قبل در قسمت های بالایی جو وجود داره از هزینه بالا بردن جرم لازم برای حرکت به اربیت جلوگیری میکنه از آنجایی که هیچ جرم باری به اربیت منتقل نمیشه در هنگام استفاده از سیستمها و روشهای کلرینگ دبریس در این روشم امکان تولید دبریس اضافی وجود نداره. علاوه بر این دبریس را می توان بدون اپریشن پرهزینه ستلایت لانچ یا سایر پدهابه فضا پاک کرد. هزینه های فیول و انرژی کمتر می تواند منجر به کاهش هزینه های اپریشنال و انجام سریعتر ماموریت بشه. علاوه بر کلرینگ اجسام دبریس بزرگ، این روش همچنین می تواند برای کلرینگ پارتیکلز بسیار کوچک از دبریس (مانند چیپ های رنگ و متال پیسسز) که تهدیدی غیرقابل تریسینگ برای اپریشن وسایلاسپیس وییکلز و پرواز انسان به فضا هستند نیز به کار بره ستون گاز را می توان به گونه ای کانفیگوریشن کرد که یک تارگت فیلد نسبتاً بزرگ یا منطقه ای از فضا را بدون نیاز بهتری سینگ یا شناسایی دبریس که بایدکلرینگ بشن کلرینگ کرد، و بنابراین از مشکل اساسی و چالش برانگیز فناوری تریسینگ و تارگت بزرگ جوگیری کرد. زیرا کلرینگ دبریس معمولاً شامل رانده شدن به داخل گاز اتمسفر اربیت با سرعت کم یا بدون اربیت (یعنی ورتیکال) است و در نتیجه خروج اتمسفر را کاهش میدهد.
ایجاد میکنه امانگاتیو پرشر ایجاد نمیکنه ایده من از ورتکس گرفتم ایده ورتکس در فضا اگر معادلات اویلر یک بعدی اینکمپرسیبل را در نظر بگیریم (اصولاً F=ma اما برای فلوید بدون ویسکوزیته) معادله به نظر میرسه$\frac{\partial u}{\partial t} + u\frac{\partial u}{\partial x} = -\frac{1}{\rho}\frac{\partial p}{\partial x}$
سمت چپ اکسلریشن یک توده کوچک مایع و سمت راست فورس تقسیم بر جرمه. از آنجایی که گفتم این غیر استیکی هست فقط پرشرگرادیان وجود داره
علامت منفی در جلوی پرشرگرادیان یعنی که اکسلریشن وکتور در جهت مخالف وکتور پرشر گرادیان. گرادیان وکتور از کم به زیاد می روند و بنابراین اکسلریشن در جهت های پرسر به لو پرشر است.
هسته یک ورتکس به طور کلی یک حداقل پرشر (اگرچه ویسکوزیته کمی تغییر می کنه بنابراین فورس از بیرون ورتکس به داخل ورتکس وارد میشه. این کاملاً بر اساس میزان پایین بودن پرشر در داخل ورتکس نسبت به خارجه . ایده کلرینگ اسپیس دبریس شامل به حرکت درآوردن تودهای از گازهای جوی که در مسیر اسپیس دبریس قرار دارن به طوری که اسپیس دبریس هنگام عبور با ستون گازی برخورد میکنند. افزایش تنشن اتمسفر از گس پارتیکلز ستون در مسیردبریس مانع از انتشاراسپیس دبریس به سمت جلو میشه و به تدریج اسپیس دبریس را کاهش میده این روشی کلرینگ دبریس در اربیت پایین زمین (LEO) هست ببینید ورود گس پارتیکلز به مسیردبریس رزیستنس اتمسفر یا تنشن اتمسفر را که دبریس از آن عبور می کنند افزایش میده به طوری که به تدریج اجسامی که از توده عبور می کنند کاهش میده. از آنجایی که اربیت که ذره ای از اسپیس دبریس در آن حرکت می کند به طور کلی با اربیتال اسپید ذره ارتباط نزدیکی داره حتی یک کاهش کوچک در سرعت ناشی از افزایش پارتیکلز جو در مسیر دبریس می تواند برای سوئیچ کردن دبریسکافی باشه. به اربیت پایینتری میره و در نهایت منجر به کلرینگ اتمسفراز دبریس میشه. دبریس اربیت ژئوسنکرون
با توجه به روش اولم روشی برای کلرینگ اسپیس دبریس از اربیت زمین شامل پراکندگی یک ماده اکسپلوسیو گازی برای هدایت یک توده گازی به مسیر اسپیس دبریس . این روش همچنین شامل برانگیختن اکسپلوژن از شارژ شکل است،
در نتیجه باعث میشه که توده گازی در مسیر اسپیس دبریس اینجکشن بشه تا اسپید اربیت اسپیس دبریس کاهش یابد و اسپیس دبریس دوباره وارد جو زمین شوند. ستون گازی به حجمی از مواد یا گس پارتیکلز، معمولاً کمپرسدایر، اشاره دارد که به سمت بالا به سمت فضا حرکت می کنند.
ماده اکسپلوسیو گازی شامل یک ماده اکسپلوسیو ایر فیول است. یک ماژول کنترل یک ماشه اکسپلوژن بار شکل گازی را نسبت به محل اسپیس دبریس تارگت ضرب میکنه به طوری که اسپیس دبریس با ستون گازی برخورد میکنن "ماژول" شامل هر ترکیبی از نرمافزار، سختافزار، سفتافزار، یا رسانههای قابل خواندن کامپیوتر است که دستورالعملهای اجرایی کامپیوتری را ذخیره میکند تا پردازنده را وادار به انجام مراحل تعریفشده توسط آن دستورالعملها کند. در یک روش ستون گازی به گونهای کانفیگوریشن شده است که گس پارتیکلز برای مدت زمان محدودی در مسیر اسپیس دبریس باقی میمانند تا باعث کاهش سرعت حجم هدفی از اسپیس دبریس شود که از توده گازی در طول دوره محدود عبور میکنند. زمان. بازه زمانی محدود می تواند از کمتر از چند ثانیه تا چند دقیقه بسته به مثلاً دانسیته اسپیس دبریسفیلد مورد نظر، اندازه پارتیکلز دبری که باید پاک شوند و اسپید اربیت اسپیس دبریس متغیر باشد.
با توجه به روش دوم طرحم سیستمی برای کلرینگ اسپیس دبریس از اربیت زمین شامل یک ژنراتور ورتکس برای به حرکت درآوردن ورتکس از توده گازی به سمت مسیر اسپیس دبریس در نتیجه باعث میشه که توده گازی در مسیر حرکت اسپیس دبریس اینجکشن بشه اسپیس دبریس برای کلرینگ اسپیس دبریس. ورتکس به یک روتیشن یک اسپایرل یا یک جریان روتیشن فلوید در اطراف مرکز روتیشن اشاره داره سیال شامل گس پارتیکلز جوی هست. توده هوای چرخان یا در حال روتیشن می تواند اشکال مختلفی داشته باشد از جمله بدون هیچ محدودیتی به شکل اسپایرل ستون یا اسپایرل ورتکس به طور کلی با بیرون راندن فلوید از طریق یک دهانه کوچک ایجاد میشه که ممکن است به صورت فیزیکی یا از طریق عمل یک اکسپلوژن شکل در یک ژنراتور ورتکس ایجادبشه به دلیل نحوه روتیشن فلوید (یعنی برای حفظ ورتکس اولیه)، یک ورتکس می تواند برای مسافت نسبتاً طولانی قبل از اینکه توسط کشش در محیط حرکت پراکنده بشه منتشر بشه در طرح من ورتکس با رانش ایر کامپرسد از طریق یک دهانه به شکل مناسب مانند یک مخروط با انتهای بازایجاد میشه در یاورتکس با ایجاد یک اکسپلوژن در زیر یک سوراخ در استراکچر شکل ایجاد میشه
یک ژنراتورورتکس یک ورتکس رینگ تولید میکنه که معمولاً از اکسپلوژن استیلن-هوا یا هیدروژن-اکسیژن برای به حرکت درآوردن ستون گازی استفاده میشه. این سیستم شامل یک سکوی شناور (به عنوان مثال، یک بالون در های التیتیود ) برای حفظ ژنراتورورتکس در التیتیود اپریشن از سطح زمین و یک دستگاه تارگت برای تارگت قرار دادن ژنراتور ورتکس به طور قابل ملاحظه ای متعامد به مسیر اسپیس دبریس هایت اپریشن میتونه هر التیتیود ساب اوربیتال مناسبی باشه و معمولاً برای کاهش تنشن اتمسفر روی ورتکس انتخاب میشه. ببینید ژنراتور ورتکس یک تفنگ حلقهای ورتکس پرقدرته که به گونهای ساخته شده است که باعث شود توده گازی به مزوسفر نفوذ کرده و وارد ترموسفر بشه ژنراتور ورتکس با ایجاد یک اکسپلوژن بار اکسپلوژن انرژی میگیره. گازهایی که برای فعال کردن ورتکس به حرکت در می آیند را می توان از استراتوسفر جمع آوری کرد.
کاهش سرعت دبریس عمدتاً با افزایش مقدار گس پارتیکلز جوی ایجاد میشه که مسیر اسپیس دبریس را مسدود میکنه. بنابراین، برای افکتیو بودن، ستون فقط باید با انرژی کافی اینجکشن میشه تا فقط جرم کافی از گس پارتیکلز را در مقابل اسپیس دبریس قرار بده.مدولاسیون اتمسفر، بر خلاف دایرکت ایمپکت یا دایرکت فورس ناشی از یک اکسپلوژن در اربیت میتونه منجر به کاهش بیشتر در مصرف انرژی بشه، زیرا ستون فقط باید با انرژی کافی برای رسیدن به التیتیود تارگت خود حرکت داده بشه تا افکتیو باشه . در یک روش من ستون را می توان با انرژی کافی کانفیگوریشن کرد به طوری که با انرژی باقیمانده کافی به تارگت اربیت برسه تا ایمپکت به اسپیس دبریس که با ستون برخورد می کنند ایجاد کنه.
استفاده از گاز اتمسفر که از قبل در قسمت های بالایی جو وجود داره از هزینه بالا بردن جرم لازم برای حرکت به اربیت جلوگیری میکنه از آنجایی که هیچ جرم باری به اربیت منتقل نمیشه در هنگام استفاده از سیستمها و روشهای کلرینگ دبریس در این روشم امکان تولید دبریس اضافی وجود نداره. علاوه بر این دبریس را می توان بدون اپریشن پرهزینه ستلایت لانچ یا سایر پدهابه فضا پاک کرد. هزینه های فیول و انرژی کمتر می تواند منجر به کاهش هزینه های اپریشنال و انجام سریعتر ماموریت بشه. علاوه بر کلرینگ اجسام دبریس بزرگ، این روش همچنین می تواند برای کلرینگ پارتیکلز بسیار کوچک از دبریس (مانند چیپ های رنگ و متال پیسسز) که تهدیدی غیرقابل تریسینگ برای اپریشن وسایلاسپیس وییکلز و پرواز انسان به فضا هستند نیز به کار بره ستون گاز را می توان به گونه ای کانفیگوریشن کرد که یک تارگت فیلد نسبتاً بزرگ یا منطقه ای از فضا را بدون نیاز بهتری سینگ یا شناسایی دبریس که بایدکلرینگ بشن کلرینگ کرد، و بنابراین از مشکل اساسی و چالش برانگیز فناوری تریسینگ و تارگت بزرگ جوگیری کرد. زیرا کلرینگ دبریس معمولاً شامل رانده شدن به داخل گاز اتمسفر اربیت با سرعت کم یا بدون اربیت (یعنی ورتیکال) است و در نتیجه خروج اتمسفر را کاهش میدهد.

-
rohamavation
نام: roham hesami radرهام حسامی راد
محل اقامت: 100 مایلی شمال لندن جاده آیلستون، لستر، لسترشر. LE2
عضویت : سهشنبه ۱۳۹۹/۸/۲۰ - ۰۸:۳۴
پست: 3278-
سپاس: 5494
- جنسیت:
تماس:
Re: هوافضا
سه مرحله طراحی هواپیما
طراحی مفهومی
اولین مرحله طراحی هواپیما، طراحی مفهومی است. این همان آغاز فرآیند طراحی است که در آن طرح های ناهموار با توجه به پیکربندی هواپیما ایجاد می شود. طراحان به دنبال دستیابی به طرحی هستند که تمام الزامات هواپیما از جمله آیرودینامیک، نیروی محرکه، عملکرد، سیستم های ساختاری، سیستم های کنترل و غیره را برآورده کند. طراحان همچنین باید عناصری مانند شکل بدنه هواپیما، محل بال، اندازه موتور و موارد دیگر را در نظر بگیرند.
طراحی اولیه
پس از تکمیل طرح مفهومی، مرحله بعدی طراحی اولیه است. در طول این مرحله، طراحی مفهومی بهینه سازی می شود تا در پارامترهای لازم قرار گیرد. مهندسان ممکن است از طرح های موجود برای انجام آزمایش تونل باد و محاسبات دینامیکی سیالات استفاده کنند. علاوه بر این، تجزیه و تحلیل های ساختاری و کنترلی در این مرحله انجام می شود. مهندسان همچنین به دنبال عیوب و ایرادات سازه ای خواهند بود و قبل از اینکه به مرحله سوم و نهایی فرآیند طراحی بروند، آنها را اصلاح می کنند.
طراحی جزئیات
آخرین اما نه کم اهمیت، مرحله طراحی جزئیات است. در این مرحله مهندسان باید از طرح های موجود برای ساخت هواپیمای واقعی استفاده کنند. این به طور خاص طراحی، محل و مقدار عناصر مانند مالش، اسپار، بخش و غیره را تعیین می کند. علاوه بر این، تمام جنبه های آیرودینامیکی، ساختاری، کنترل و عملکرد در مرحله طراحی اولیه قبلی به طور کامل به دست آمده و آزمایش شده است. مرحله طراحی جزئیات، در عوض، برای تبدیل این طرح ها به یک هواپیمای کار استفاده می شود. همچنین ممکن است شامل شبیهسازیهای پرواز برای آزمایش طراحی و اطمینان از عملکرد آن بهعنوان مورد نظر باشد.
چرا واقعاً فقط یک طرح اساسی برای هواپیماهای مسافربری وجود دارد؟برای اکثر هواپیماهای ترابری، راندمان آیرودینامیکی پارامتر کلیدی است زیرا باعث مصرف سوخت کمتر می شود. طرحبندیهایی که اغلب میبینید، کارآمدترین طرحبندیهایی هستند که شناخته شدهاند:
برای جت ها، بال های کم جارو با موتورهای نصب شده در زیر و جلوتر از بال ها و دم معمولی، کارآمدترین طرح شناخته شده است.
هواپیماهای ملخی کندتر پرواز می کنند، بنابراین بال های مستقیم دارند. بال های نصب شده در پایین کمی کارآمدتر هستند، اما پس از آن هواپیما برای حفظ فاصله کافی از زمین برای پروانه ها باید دارای دنده بلند باشد، بنابراین بال های بلند رایج تر هستند. سپس T-tail به سادگی برای قرار دادن آسانسور در بالای آشفته ترین مسیر بال و موتور استفاده می شود.
تنها انحرافات از این سه چیدمان اساسی در هواپیمای هدف خاص است که نگرانی مهمتری دارد. قابل توجه ترین آنها این است که هواپیماهای باری نظامی عموماً بال بالایی دارند، بنابراین می توانند برای بارگیری و تخلیه آسان با استفاده از رمپ تعبیه شده در ارتفاع پایین روی زمین بنشینند. نقطه عطف مشخص شده آنها برای جلوگیری از تثبیت بیش از حد هواپیما در چرخش است زیرا هم بال بالا و هم جابجایی بال باعث افزایش پایداری رول می شود. طراحی های قبلی regiojet از موتورهای دمی به همین دلیل استفاده می کردند. پایینتر روی زمین بنشینند تا بتوانند به راحتی از طریق پلههای هوایی داخلی بارگیری شوند و این پلهها خیلی سنگین و حجیم نیستند.اگر به اطراف یک فرودگاه مرکز فعال معقول نگاه کنید، در واقع گزینه های مختلف طراحی برای هواپیماهای مسافربری را خواهید دید که همه امروز تولید می شوند:
برخی دارای بال های بلند (بالای پنجره ها) و برخی پایین هستند.
برخی بالهای جارویی دارند، برخی مستقیم.
برخی موتورها در زیر بال ها نصب شده اند، برخی دیگر آنها را به بدنه متصل می کنند.
برخی موتورهای توربوفن دارند و برخی دیگر دارای پروانه هستند.
برخی دارای دم هواپیماهای معمولی هستند، برخی دیگر دارای دم تی هستند.
برخی دو موتور دارند، برخی چهار موتور دارند.
بیشتر آنها بدنه تقریباً استوانه ای شکلی دارند. برخی از آنها اشکال دیگری دارند (747 را در نظر بگیرید که سطح مقطع بدنه آن به طور چشمگیری در نیمه پایین هواپیما تغییر می کند).
اگر به هواپیماهایی که برای پرواز مسافتهای مشابه با تعداد مسافر مشابه بهینه شدهاند نگاه کنید (مثلاً ایرباس A320 را با بوئینگ 737 مقایسه کنید) در اکثر این دستهها گزینههای یکسانی خواهند داشت. این به این دلیل است که انتخاب ها تفاوت ایجاد می کنند، و برای آن استفاده خاص، یک ترکیب خاص از نظر اقتصادی سودمند است.
با این حال، وقتی به هواپیماهایی با نقش های مختلف نگاه کنید، همه چیز تغییر می کند. یک مدل منطقه ای 70 نفره مانند ATR 72 به هیچ وجه شبیه یک A320 کوچک شده نیست.
(به جز بسیار درشت در سطح "بدنه باریک بلند، یک جفت بال اصلی در نزدیکی مرکز آن، گروهی از تثبیت کننده ها در تمام مسیر عقب، دنده سه چرخه").
آیرودینامیک خارجی: ویژگی های آیرودینامیکی را استنباط کنید و تغییراتی را در خط مدل بیرونی در صورت نیاز برای دستیابی به ویژگی های مورد نظر پیشنهاد کنید. مهارت ها: ریاضیات کاربردی، مهندسی هوانوردی.
علم پرواز: استنتاج عملکرد، قابلیت کنترل و ویژگی های پایداری هواپیما، و پیشنهاد تغییرات در کنترل پرواز/آیرودینامیک در صورت نیاز برای دستیابی به ویژگی های مورد نظر. مهارت ها: ریاضیات کاربردی، مهندسی هوانوردی.
بارها و دینامیک: جفت سازه ای/آیرودینامیکی هواپیما را استنتاج کنید و بارهای خارجی روی سازه ها، سطوح کنترل و ارابه فرود را حل کنید. مهارت ها: ریاضیات کاربردی، مهندسی هوانوردی.
ترمودینامیک: نیازهای گرمایش و سرمایش، جریان گاز داخلی و همچنین محلول های ضد یخ را استنتاج می کند. مهارت: مهندسی مکانیک.
ساختار: ساختارهای داخلی که هواپیما را شکل می دهند و مکانیسم های مکانیکی که وظایف مورد نظر خود را انجام می دهند طراحی کنید. مهارت: مهندسی مکانیک.
تنش: تنشهای داخل سازه هواپیما را استنتاج کرده و تغییراتی را پیشنهاد میکند که قطعات مربوطه به چرخههای خستگی مورد نیاز دست یابند. مهارت: مهندسی مکانیک.
کنترل پرواز (سنتی): طراحی معماری مکانیکی/هیدرولیک و اتصال به یکدیگر برای دستیابی به مسیرهای مکانیکی مورد نظر برای فعال کردن سطوح کنترل پرواز. مهارت ها: مهندسی مکانیک، مهندسی هیدرولیک.
کنترل پرواز (FBW): طراحی معماری های الکتریکی، محاسباتی و هیدرولیک برای دستیابی به فعال سازی ایمن و قابل اعتماد سطوح کنترل پرواز. مهارت ها: مهندسی مکانیک، مهندسی برق، علوم کامپیوتر.
قانون کنترل (FBW): طراحی مدل ریاضی و اجرای نرم افزار قوانین کنترل پرواز/ خلبان خودکار برای دستیابی به کنترل دقیق و قوی هواپیما. مهارت ها: مهندسی برق، مهندسی سیستم های کنترل، ریاضیات کاربردی.
سیستم های الکتریکی: طراحی سیستم های ولتاژ بالا و پایین که برق را از ژنراتورهای الکتریکی به طور ایمن و قابل اطمینان به مناطق مورد نظر ارسال می کنند. مهارت: مهندسی برق.
عوامل انسانی: تجزیه و تحلیل و طراحی رابط های سخت افزاری/نرم افزاری که برای خلبانان/اپراتورها/سرنشینان بصری، دقیق و قوی هستند. مهارت: مهندسی صنایع.
فضای داخلی: در حالی که اغلب به عنوان هوانوردی کافی نیست، یکی از مهم ترین نقاط فروش هواپیما تا آنجا که به سرنشینان مربوط می شود (به ویژه جت های تجاری) است. مهارت: مهندسی صنایع، طراحی داخلی.
ادغام: حتی فهرست کردن موارد فوق کمی زمان برد، بنابراین مهم است که الزامات را توضیح دهیم، ردیابی کنیم و اعتبار سنجی کنیم به طوری که وقتی همه چیز در کنار هم قرار می گیرد، مطابقت داشته باشند. این ممکن است شامل ده ها یا حتی صدها تامین کننده باشد که ممکن است دامنه محدودی برای هدف کلی طراحی داشته باشند. مهارت ها: مهندسی سیستم ها، مهندسی صنایع
قابلیت اطمینان و ایمنی: احتمال خرابی هر سیستم/قطعه در هواپیما را استنباط کنید و اطمینان حاصل کنید که بحرانی بودن خرابی احتمال طراحی شده را تضمین می کند. مهارت ها: مهندسی سیستم ها.
احتمالاً چند قسمت کلیدی را از دست داده ام. اما همانطور که می بینید، طراحی یک هواپیما یک تلاش بسیار متنوع است که نیازمند دانش و تجربه مادام العمر است. شما میتوانید در هر زمینهای متخصص باشید، و همچنان در طراحی کلی مشارکت کنید.
خلبانان آزمایشی آزمایشی احتمالاً به همان اندازه نزدیک هستند که هر شخصی بتواند یک جک از همه مشاغل باشد. بیشتر خلبانان آزمایشی که من می شناسم بیشتر از بسیاری از طراحان رشته (های خاص) خود، با طراحی و سیستم های کلی هواپیما آشنا هستند. علاوه بر انباشته شدن ساعات پروازی زیاد (بیشتر آنها نظامی)، آنها در مهندسی فنی به خوبی مسلط هستند و اکثر آنها دارای کارشناسی ارشد مهندسی هستند.فرآیند طراحی هواپیما
مدل AST در تونل باد
فرآیند طراحی هواپیما یک روش کاملاً تعریف شده است که برای ایجاد تعادل در بسیاری از الزامات رقابتی و تقاضا برای تولید هواپیمایی که قوی، سبک، مقرون به صرفه است و می تواند محموله کافی را حمل کند و در عین حال به اندازه کافی قابل اعتماد برای پرواز ایمن در طول عمر طراحی هواپیما باشد، استفاده می شود. مشابه، اما دقیقتر از فرآیند طراحی مهندسی معمول، این تکنیک بسیار تکراری است، که شامل معاوضههای پیکربندی سطح بالا، ترکیبی از تجزیه و تحلیل و آزمایش و بررسی دقیق کفایت هر بخش از سازه است. برای برخی از انواع هواپیما، فرآیند طراحی توسط مقامات قابلیت پرواز غیرنظامی تنظیم می شود.
هدف
فرآیند طراحی با هدف مورد نظر هواپیما شروع می شود. هواپیماهای تجاری برای حمل محموله مسافری یا محموله، برد طولانی و بازده سوخت بیشتر طراحی شده اند، در حالی که جت های جنگنده برای انجام مانورهای با سرعت بالا و پشتیبانی نزدیک از نیروهای زمینی طراحی شده اند. برخی از هواپیماها مأموریت های خاصی دارند، به عنوان مثال، هواپیماهای آبی خاکی دارای طراحی منحصر به فردی هستند که به آنها اجازه می دهد هم از زمین و هم از آب عملیات کنند، برخی از جنگنده ها مانند جت پرشی هریر دارای قابلیت VTOL (برخاست و فرود عمودی) هستند، هلیکوپترها دارای این قابلیت هستند. توانایی شناور شدن بر روی یک منطقه برای یک دوره زمانی
هدف ممکن است متناسب با یک نیاز خاص باشد، به عنوان مثال. مانند مورد تاریخی مشخصات وزارت هوایی بریتانیا، یا پر کردن یک "شکاف در بازار" یعنی کلاس یا طرحی از هواپیما که هنوز وجود ندارد، اما تقاضای قابل توجهی برای آن وجود خواهد داشت.
مقررات هواپیما
یکی دیگر از عوامل مهمی که بر طراحی تاثیر می گذارد، الزامات اخذ گواهی نوع برای طراحی جدید هواپیما است. این الزامات توسط مقامات مهم ملی قابلیت پرواز از جمله اداره هوانوردی فدرال ایالات متحده و آژانس ایمنی هوانوردی اروپا منتشر شده است.
فرودگاه ها همچنین ممکن است محدودیت هایی را برای هواپیما اعمال کنند، به عنوان مثال، حداکثر طول بال های مجاز برای یک هواپیمای معمولی 80 متر (260 فوت) است تا از برخورد بین هواپیما در حین تاکسی جلوگیری شود.
ایمنی
سرعت بالا، مخازن سوخت، شرایط جوی در ارتفاعات سفر دریایی، خطرات طبیعی (رعد و برق، تگرگ و برخورد پرندگان) و خطای انسانی برخی از خطرات بسیاری هستند که تهدیدی برای سفرهای هوایی هستند
سازنده هواپیما اطمینان حاصل می کند که هواپیما با استانداردهای طراحی موجود مطابقت دارد، محدودیت های عملیاتی و برنامه های تعمیر و نگهداری را تعریف می کند و پشتیبانی و نگهداری را در طول عمر عملیاتی هواپیما ارائه می دهد. اپراتورهای هوانوردی شامل هواپیماهای مسافربری و باری، نیروی هوایی و صاحبان هواپیماهای خصوصی میشوند. آنها موافقت می کنند با مقررات تعیین شده توسط نهادهای نظارتی مطابقت داشته باشند، محدودیت های هواپیما را همانطور که توسط سازنده مشخص شده است درک کنند، نقص ها را گزارش کنند و به سازندگان در حفظ استانداردهای شایستگی پرواز کمک کنند.
اکثر انتقادات طراحی این روزها بر اساس قابلیت تصادف است. حتی با بیشترین توجه به قابلیت پرواز، حوادث همچنان رخ می دهد. قابلیت سقوط، ارزیابی کیفی چگونگی زنده ماندن هواپیما از یک حادثه است. هدف اصلی محافظت از مسافران یا محموله های با ارزش از آسیب های ناشی از تصادف است. در مورد هواپیماهای مسافربری، پوست تحت فشار بدنه این ویژگی را فراهم می کند، اما در صورت برخورد دماغه یا دم، گشتاورهای خمشی بزرگ در تمام طول بدنه ایجاد می شود که باعث شکستگی در پوسته می شود و باعث شکسته شدن بدنه می شود. به بخش های کوچکتر.بنابراین هواپیمای مسافربری به گونهای طراحی شده است که ترتیب صندلیها از مناطقی که احتمال نفوذ در تصادف وجود دارد، مانند نزدیک پروانه، ناسل موتور و غیره دور باشد.داخل کابین همچنین دارای ویژگیهای ایمنی مانند ماسکهای اکسیژن است که در صورت از دست دادن فشار کابین پایین میآیند، محفظه چمدان قابل قفل، کمربند ایمنی، جلیقه نجات، دربهای اضطراری و نوارهای نورانی کف. هواپیماها گاهی اوقات با در نظر گرفتن فرود اضطراری آب طراحی میشوند، برای مثال ایرباس A330 دارای یک سوئیچ «ditching» است که دریچهها و روزنههای زیر هواپیما را میبندد و ورود آب را کند میکند.
بهینه سازی طراحی
طراحان هواپیما معمولاً طرح اولیه را با در نظر گرفتن تمام محدودیتهای طراحی آنها تقریبی میکنند. از نظر تاریخی، تیمهای طراحی کوچک بودند، معمولاً توسط یک طراح ارشد که همه الزامات و اهداف طراحی را میداند و تیم را بر اساس آن هماهنگ میکرد، رهبری میشد. با گذشت زمان، پیچیدگی هواپیماهای نظامی و هواپیمایی نیز افزایش یافت. پروژه های مدرن نظامی و طراحی خطوط هوایی در مقیاس بزرگی هستند که هر جنبه طراحی توسط تیم های مختلف مورد بررسی قرار می گیرد و سپس گرد هم می آیند. در هوانوردی عمومی تعداد زیادی از هواپیماهای سبک توسط علاقمندان و علاقمندان آماتور طراحی و ساخته می شوند.
طراحی هواپیما به کمک کامپیوتر
سطوح خارجی هواپیما مدل سازی شده در متلب
بال هواپیمای بال ثابت، بالابر لازم برای پرواز را فراهم می کند. هندسه بال بر هر جنبه ای از پرواز هواپیما تأثیر می گذارد. منطقه بال معمولاً توسط سرعت توقف مورد نظر تعیین می شود، اما شکل کلی پلان فرم و سایر جنبه های جزئیات ممکن است تحت تأثیر عوامل چیدمان بال قرار گیرد بال را می توان در موقعیت های بالا، پایین و وسط به بدنه سوار کرد. طراحی بال به پارامترهای زیادی مانند انتخاب نسبت ابعاد، نسبت مخروطی، زاویه برگشت، نسبت ضخامت، نمایه مقطع، شستشو و دو وجهی بستگی دارد. شکل مقطع بال، ایرفویل آن است.ساخت بال با دنده ای شروع می شود که شکل ایرفویل را مشخص می کند. دنده ها را می توان از چوب، فلز، پلاستیک یا حتی کامپوزیت ساخت
بال باید طوری طراحی و آزمایش شود که بتواند حداکثر بارهای تحمیل شده توسط مانورها و وزش های جوی را تحمل کند.
موتور هواپیما در حال آزمایش در تونل باد
نیروی محرکه هواپیما ممکن است توسط موتورهای هواپیما طراحی شده خاص، موتورهای خودکار، موتور سیکلت یا اتومبیل برفی، موتورهای الکتریکی یا حتی قدرت عضلانی انسان به دست آید. پارامترهای اصلی طراحی موتور عبارتند از
حداکثر نیروی رانش موتور در دسترس است
مصرف سوخت
جرم موتور
هندسه موتور
رانش ارائه شده توسط موتور باید کشش را در سرعت کروز متعادل کند و بیشتر از درگ باشد تا امکان شتاب گیری فراهم شود. موتور مورد نیاز با نوع هواپیما متفاوت است. به عنوان مثال، هواپیماهای تجاری زمان بیشتری را در سرعت کروز صرف می کنند و به کارایی موتور بیشتری نیاز دارند. جت های جنگنده با کارایی بالا به شتاب بسیار بالایی نیاز دارند و بنابراین نیاز به رانش بسیار بالایی دارند.
ارابه فرود
وزن ناخالص هواپیما
وزن هواپیما عامل مشترکی است که تمام جنبه های طراحی هواپیما مانند آیرودینامیک، ساختار و نیروی محرکه را به هم مرتبط می کند. وزن هواپیما از عوامل مختلفی مانند وزن خالی، بار مفید، بار مفید و غیره به دست میآید. وزنهای مختلف برای محاسبه مرکز جرم کل هواپیما استفاده میشود. مرکز جرم باید در محدوده تعیین شده توسط سازنده قرار گیرد.
ساختار
ساختار هواپیما نه تنها بر استحکام، آئروالاستیسیته، دوام، تحمل آسیب، پایداری، بلکه بر ایمنی در برابر شکست، مقاومت در برابر خوردگی، قابلیت نگهداری و سهولت ساخت تمرکز دارد. سازه باید بتواند تنش های ناشی از فشار کابین، در صورت نصب، تلاطم و ارتعاشات موتور یا روتور را تحمل کند.
فرآیند طراحی و شبیه سازی
طراحی هر هواپیما در سه مرحله شروع می شود
طراحی مفهومی
طراحی مفهومی
طراحی مفهومی هواپیما شامل ترسیم انواع پیکربندی های ممکن است که مشخصات طراحی مورد نیاز را برآورده می کند. با ترسیم مجموعهای از پیکربندیها، طراحان به دنبال دستیابی به پیکربندی طراحی هستند که به طور رضایتبخشی همه الزامات را برآورده میکند و همچنین با عواملی مانند آیرودینامیک، نیروی محرکه، عملکرد پرواز، ساختار و سیستمهای کنترل همراه است. به این بهینه سازی طراحی می گویند. جنبه های اساسی مانند شکل بدنه، پیکربندی و مکان بال، اندازه و نوع موتور همگی در این مرحله تعیین می شوند. محدودیتهای طراحی مانند موارد ذکر شده در بالا همگی در این مرحله در نظر گرفته میشوند. محصول نهایی یک طرح مفهومی از پیکربندی هواپیما بر روی کاغذ یا صفحه کامپیوتر است که باید توسط مهندسان و دیگر طراحان بررسی شود.
مرحله طراحی اولیه
پیکربندی طراحی که در مرحله طراحی مفهومی به دست آمد، سپس بهینه سازی و بازسازی می شود تا در پارامترهای طراحی قرار گیرد. در این مرحله آزمایش تونل باد و محاسبات دینامیکی سیالات محاسباتی میدان جریان اطراف هواپیما انجام می شود. ماجو
تجزیه و تحلیل ساختاری و کنترلی نیز در این مرحله انجام می شود. ایرادات آیرودینامیکی و ناپایداری های سازه ای در صورت وجود اصلاح و طرح نهایی ترسیم و نهایی می شود. سپس پس از نهایی شدن طراحی، تصمیم کلیدی با سازنده یا فردی است که آن را طراحی می کند که آیا واقعاً تولید هواپیما را ادامه دهد. در این مرحله، چندین طرح، اگرچه کاملاً قابلیت پرواز و عملکرد را دارند، ممکن است به دلیل غیرقابل تحمل بودن از تولید خارج شوند.
مرحله طراحی جزئیات
این مرحله صرفاً به جنبه ساخت هواپیمای تولیدی می پردازد. تعداد، طرح و محل دنده ها، اسپارها، مقاطع و سایر عناصر ساختاری را تعیین می کند تمام جنبه های آیرودینامیکی، ساختاری، پیشرانه، کنترل و عملکرد قبلاً در مرحله طراحی اولیه پوشش داده شده است و فقط ساخت آن باقی مانده است. شبیه سازهای پرواز برای هواپیما نیز در این مرحله توسعه یافته است.
طراحی مفهومی
اولین مرحله طراحی هواپیما، طراحی مفهومی است. این همان آغاز فرآیند طراحی است که در آن طرح های ناهموار با توجه به پیکربندی هواپیما ایجاد می شود. طراحان به دنبال دستیابی به طرحی هستند که تمام الزامات هواپیما از جمله آیرودینامیک، نیروی محرکه، عملکرد، سیستم های ساختاری، سیستم های کنترل و غیره را برآورده کند. طراحان همچنین باید عناصری مانند شکل بدنه هواپیما، محل بال، اندازه موتور و موارد دیگر را در نظر بگیرند.
طراحی اولیه
پس از تکمیل طرح مفهومی، مرحله بعدی طراحی اولیه است. در طول این مرحله، طراحی مفهومی بهینه سازی می شود تا در پارامترهای لازم قرار گیرد. مهندسان ممکن است از طرح های موجود برای انجام آزمایش تونل باد و محاسبات دینامیکی سیالات استفاده کنند. علاوه بر این، تجزیه و تحلیل های ساختاری و کنترلی در این مرحله انجام می شود. مهندسان همچنین به دنبال عیوب و ایرادات سازه ای خواهند بود و قبل از اینکه به مرحله سوم و نهایی فرآیند طراحی بروند، آنها را اصلاح می کنند.
طراحی جزئیات
آخرین اما نه کم اهمیت، مرحله طراحی جزئیات است. در این مرحله مهندسان باید از طرح های موجود برای ساخت هواپیمای واقعی استفاده کنند. این به طور خاص طراحی، محل و مقدار عناصر مانند مالش، اسپار، بخش و غیره را تعیین می کند. علاوه بر این، تمام جنبه های آیرودینامیکی، ساختاری، کنترل و عملکرد در مرحله طراحی اولیه قبلی به طور کامل به دست آمده و آزمایش شده است. مرحله طراحی جزئیات، در عوض، برای تبدیل این طرح ها به یک هواپیمای کار استفاده می شود. همچنین ممکن است شامل شبیهسازیهای پرواز برای آزمایش طراحی و اطمینان از عملکرد آن بهعنوان مورد نظر باشد.
چرا واقعاً فقط یک طرح اساسی برای هواپیماهای مسافربری وجود دارد؟برای اکثر هواپیماهای ترابری، راندمان آیرودینامیکی پارامتر کلیدی است زیرا باعث مصرف سوخت کمتر می شود. طرحبندیهایی که اغلب میبینید، کارآمدترین طرحبندیهایی هستند که شناخته شدهاند:
برای جت ها، بال های کم جارو با موتورهای نصب شده در زیر و جلوتر از بال ها و دم معمولی، کارآمدترین طرح شناخته شده است.
هواپیماهای ملخی کندتر پرواز می کنند، بنابراین بال های مستقیم دارند. بال های نصب شده در پایین کمی کارآمدتر هستند، اما پس از آن هواپیما برای حفظ فاصله کافی از زمین برای پروانه ها باید دارای دنده بلند باشد، بنابراین بال های بلند رایج تر هستند. سپس T-tail به سادگی برای قرار دادن آسانسور در بالای آشفته ترین مسیر بال و موتور استفاده می شود.
تنها انحرافات از این سه چیدمان اساسی در هواپیمای هدف خاص است که نگرانی مهمتری دارد. قابل توجه ترین آنها این است که هواپیماهای باری نظامی عموماً بال بالایی دارند، بنابراین می توانند برای بارگیری و تخلیه آسان با استفاده از رمپ تعبیه شده در ارتفاع پایین روی زمین بنشینند. نقطه عطف مشخص شده آنها برای جلوگیری از تثبیت بیش از حد هواپیما در چرخش است زیرا هم بال بالا و هم جابجایی بال باعث افزایش پایداری رول می شود. طراحی های قبلی regiojet از موتورهای دمی به همین دلیل استفاده می کردند. پایینتر روی زمین بنشینند تا بتوانند به راحتی از طریق پلههای هوایی داخلی بارگیری شوند و این پلهها خیلی سنگین و حجیم نیستند.اگر به اطراف یک فرودگاه مرکز فعال معقول نگاه کنید، در واقع گزینه های مختلف طراحی برای هواپیماهای مسافربری را خواهید دید که همه امروز تولید می شوند:
برخی دارای بال های بلند (بالای پنجره ها) و برخی پایین هستند.
برخی بالهای جارویی دارند، برخی مستقیم.
برخی موتورها در زیر بال ها نصب شده اند، برخی دیگر آنها را به بدنه متصل می کنند.
برخی موتورهای توربوفن دارند و برخی دیگر دارای پروانه هستند.
برخی دارای دم هواپیماهای معمولی هستند، برخی دیگر دارای دم تی هستند.
برخی دو موتور دارند، برخی چهار موتور دارند.
بیشتر آنها بدنه تقریباً استوانه ای شکلی دارند. برخی از آنها اشکال دیگری دارند (747 را در نظر بگیرید که سطح مقطع بدنه آن به طور چشمگیری در نیمه پایین هواپیما تغییر می کند).
اگر به هواپیماهایی که برای پرواز مسافتهای مشابه با تعداد مسافر مشابه بهینه شدهاند نگاه کنید (مثلاً ایرباس A320 را با بوئینگ 737 مقایسه کنید) در اکثر این دستهها گزینههای یکسانی خواهند داشت. این به این دلیل است که انتخاب ها تفاوت ایجاد می کنند، و برای آن استفاده خاص، یک ترکیب خاص از نظر اقتصادی سودمند است.
با این حال، وقتی به هواپیماهایی با نقش های مختلف نگاه کنید، همه چیز تغییر می کند. یک مدل منطقه ای 70 نفره مانند ATR 72 به هیچ وجه شبیه یک A320 کوچک شده نیست.
(به جز بسیار درشت در سطح "بدنه باریک بلند، یک جفت بال اصلی در نزدیکی مرکز آن، گروهی از تثبیت کننده ها در تمام مسیر عقب، دنده سه چرخه").
آیرودینامیک خارجی: ویژگی های آیرودینامیکی را استنباط کنید و تغییراتی را در خط مدل بیرونی در صورت نیاز برای دستیابی به ویژگی های مورد نظر پیشنهاد کنید. مهارت ها: ریاضیات کاربردی، مهندسی هوانوردی.
علم پرواز: استنتاج عملکرد، قابلیت کنترل و ویژگی های پایداری هواپیما، و پیشنهاد تغییرات در کنترل پرواز/آیرودینامیک در صورت نیاز برای دستیابی به ویژگی های مورد نظر. مهارت ها: ریاضیات کاربردی، مهندسی هوانوردی.
بارها و دینامیک: جفت سازه ای/آیرودینامیکی هواپیما را استنتاج کنید و بارهای خارجی روی سازه ها، سطوح کنترل و ارابه فرود را حل کنید. مهارت ها: ریاضیات کاربردی، مهندسی هوانوردی.
ترمودینامیک: نیازهای گرمایش و سرمایش، جریان گاز داخلی و همچنین محلول های ضد یخ را استنتاج می کند. مهارت: مهندسی مکانیک.
ساختار: ساختارهای داخلی که هواپیما را شکل می دهند و مکانیسم های مکانیکی که وظایف مورد نظر خود را انجام می دهند طراحی کنید. مهارت: مهندسی مکانیک.
تنش: تنشهای داخل سازه هواپیما را استنتاج کرده و تغییراتی را پیشنهاد میکند که قطعات مربوطه به چرخههای خستگی مورد نیاز دست یابند. مهارت: مهندسی مکانیک.
کنترل پرواز (سنتی): طراحی معماری مکانیکی/هیدرولیک و اتصال به یکدیگر برای دستیابی به مسیرهای مکانیکی مورد نظر برای فعال کردن سطوح کنترل پرواز. مهارت ها: مهندسی مکانیک، مهندسی هیدرولیک.
کنترل پرواز (FBW): طراحی معماری های الکتریکی، محاسباتی و هیدرولیک برای دستیابی به فعال سازی ایمن و قابل اعتماد سطوح کنترل پرواز. مهارت ها: مهندسی مکانیک، مهندسی برق، علوم کامپیوتر.
قانون کنترل (FBW): طراحی مدل ریاضی و اجرای نرم افزار قوانین کنترل پرواز/ خلبان خودکار برای دستیابی به کنترل دقیق و قوی هواپیما. مهارت ها: مهندسی برق، مهندسی سیستم های کنترل، ریاضیات کاربردی.
سیستم های الکتریکی: طراحی سیستم های ولتاژ بالا و پایین که برق را از ژنراتورهای الکتریکی به طور ایمن و قابل اطمینان به مناطق مورد نظر ارسال می کنند. مهارت: مهندسی برق.
عوامل انسانی: تجزیه و تحلیل و طراحی رابط های سخت افزاری/نرم افزاری که برای خلبانان/اپراتورها/سرنشینان بصری، دقیق و قوی هستند. مهارت: مهندسی صنایع.
فضای داخلی: در حالی که اغلب به عنوان هوانوردی کافی نیست، یکی از مهم ترین نقاط فروش هواپیما تا آنجا که به سرنشینان مربوط می شود (به ویژه جت های تجاری) است. مهارت: مهندسی صنایع، طراحی داخلی.
ادغام: حتی فهرست کردن موارد فوق کمی زمان برد، بنابراین مهم است که الزامات را توضیح دهیم، ردیابی کنیم و اعتبار سنجی کنیم به طوری که وقتی همه چیز در کنار هم قرار می گیرد، مطابقت داشته باشند. این ممکن است شامل ده ها یا حتی صدها تامین کننده باشد که ممکن است دامنه محدودی برای هدف کلی طراحی داشته باشند. مهارت ها: مهندسی سیستم ها، مهندسی صنایع
قابلیت اطمینان و ایمنی: احتمال خرابی هر سیستم/قطعه در هواپیما را استنباط کنید و اطمینان حاصل کنید که بحرانی بودن خرابی احتمال طراحی شده را تضمین می کند. مهارت ها: مهندسی سیستم ها.
احتمالاً چند قسمت کلیدی را از دست داده ام. اما همانطور که می بینید، طراحی یک هواپیما یک تلاش بسیار متنوع است که نیازمند دانش و تجربه مادام العمر است. شما میتوانید در هر زمینهای متخصص باشید، و همچنان در طراحی کلی مشارکت کنید.
خلبانان آزمایشی آزمایشی احتمالاً به همان اندازه نزدیک هستند که هر شخصی بتواند یک جک از همه مشاغل باشد. بیشتر خلبانان آزمایشی که من می شناسم بیشتر از بسیاری از طراحان رشته (های خاص) خود، با طراحی و سیستم های کلی هواپیما آشنا هستند. علاوه بر انباشته شدن ساعات پروازی زیاد (بیشتر آنها نظامی)، آنها در مهندسی فنی به خوبی مسلط هستند و اکثر آنها دارای کارشناسی ارشد مهندسی هستند.فرآیند طراحی هواپیما
مدل AST در تونل باد
فرآیند طراحی هواپیما یک روش کاملاً تعریف شده است که برای ایجاد تعادل در بسیاری از الزامات رقابتی و تقاضا برای تولید هواپیمایی که قوی، سبک، مقرون به صرفه است و می تواند محموله کافی را حمل کند و در عین حال به اندازه کافی قابل اعتماد برای پرواز ایمن در طول عمر طراحی هواپیما باشد، استفاده می شود. مشابه، اما دقیقتر از فرآیند طراحی مهندسی معمول، این تکنیک بسیار تکراری است، که شامل معاوضههای پیکربندی سطح بالا، ترکیبی از تجزیه و تحلیل و آزمایش و بررسی دقیق کفایت هر بخش از سازه است. برای برخی از انواع هواپیما، فرآیند طراحی توسط مقامات قابلیت پرواز غیرنظامی تنظیم می شود.
هدف
فرآیند طراحی با هدف مورد نظر هواپیما شروع می شود. هواپیماهای تجاری برای حمل محموله مسافری یا محموله، برد طولانی و بازده سوخت بیشتر طراحی شده اند، در حالی که جت های جنگنده برای انجام مانورهای با سرعت بالا و پشتیبانی نزدیک از نیروهای زمینی طراحی شده اند. برخی از هواپیماها مأموریت های خاصی دارند، به عنوان مثال، هواپیماهای آبی خاکی دارای طراحی منحصر به فردی هستند که به آنها اجازه می دهد هم از زمین و هم از آب عملیات کنند، برخی از جنگنده ها مانند جت پرشی هریر دارای قابلیت VTOL (برخاست و فرود عمودی) هستند، هلیکوپترها دارای این قابلیت هستند. توانایی شناور شدن بر روی یک منطقه برای یک دوره زمانی
هدف ممکن است متناسب با یک نیاز خاص باشد، به عنوان مثال. مانند مورد تاریخی مشخصات وزارت هوایی بریتانیا، یا پر کردن یک "شکاف در بازار" یعنی کلاس یا طرحی از هواپیما که هنوز وجود ندارد، اما تقاضای قابل توجهی برای آن وجود خواهد داشت.
مقررات هواپیما
یکی دیگر از عوامل مهمی که بر طراحی تاثیر می گذارد، الزامات اخذ گواهی نوع برای طراحی جدید هواپیما است. این الزامات توسط مقامات مهم ملی قابلیت پرواز از جمله اداره هوانوردی فدرال ایالات متحده و آژانس ایمنی هوانوردی اروپا منتشر شده است.
فرودگاه ها همچنین ممکن است محدودیت هایی را برای هواپیما اعمال کنند، به عنوان مثال، حداکثر طول بال های مجاز برای یک هواپیمای معمولی 80 متر (260 فوت) است تا از برخورد بین هواپیما در حین تاکسی جلوگیری شود.
ایمنی
سرعت بالا، مخازن سوخت، شرایط جوی در ارتفاعات سفر دریایی، خطرات طبیعی (رعد و برق، تگرگ و برخورد پرندگان) و خطای انسانی برخی از خطرات بسیاری هستند که تهدیدی برای سفرهای هوایی هستند
سازنده هواپیما اطمینان حاصل می کند که هواپیما با استانداردهای طراحی موجود مطابقت دارد، محدودیت های عملیاتی و برنامه های تعمیر و نگهداری را تعریف می کند و پشتیبانی و نگهداری را در طول عمر عملیاتی هواپیما ارائه می دهد. اپراتورهای هوانوردی شامل هواپیماهای مسافربری و باری، نیروی هوایی و صاحبان هواپیماهای خصوصی میشوند. آنها موافقت می کنند با مقررات تعیین شده توسط نهادهای نظارتی مطابقت داشته باشند، محدودیت های هواپیما را همانطور که توسط سازنده مشخص شده است درک کنند، نقص ها را گزارش کنند و به سازندگان در حفظ استانداردهای شایستگی پرواز کمک کنند.
اکثر انتقادات طراحی این روزها بر اساس قابلیت تصادف است. حتی با بیشترین توجه به قابلیت پرواز، حوادث همچنان رخ می دهد. قابلیت سقوط، ارزیابی کیفی چگونگی زنده ماندن هواپیما از یک حادثه است. هدف اصلی محافظت از مسافران یا محموله های با ارزش از آسیب های ناشی از تصادف است. در مورد هواپیماهای مسافربری، پوست تحت فشار بدنه این ویژگی را فراهم می کند، اما در صورت برخورد دماغه یا دم، گشتاورهای خمشی بزرگ در تمام طول بدنه ایجاد می شود که باعث شکستگی در پوسته می شود و باعث شکسته شدن بدنه می شود. به بخش های کوچکتر.بنابراین هواپیمای مسافربری به گونهای طراحی شده است که ترتیب صندلیها از مناطقی که احتمال نفوذ در تصادف وجود دارد، مانند نزدیک پروانه، ناسل موتور و غیره دور باشد.داخل کابین همچنین دارای ویژگیهای ایمنی مانند ماسکهای اکسیژن است که در صورت از دست دادن فشار کابین پایین میآیند، محفظه چمدان قابل قفل، کمربند ایمنی، جلیقه نجات، دربهای اضطراری و نوارهای نورانی کف. هواپیماها گاهی اوقات با در نظر گرفتن فرود اضطراری آب طراحی میشوند، برای مثال ایرباس A330 دارای یک سوئیچ «ditching» است که دریچهها و روزنههای زیر هواپیما را میبندد و ورود آب را کند میکند.
بهینه سازی طراحی
طراحان هواپیما معمولاً طرح اولیه را با در نظر گرفتن تمام محدودیتهای طراحی آنها تقریبی میکنند. از نظر تاریخی، تیمهای طراحی کوچک بودند، معمولاً توسط یک طراح ارشد که همه الزامات و اهداف طراحی را میداند و تیم را بر اساس آن هماهنگ میکرد، رهبری میشد. با گذشت زمان، پیچیدگی هواپیماهای نظامی و هواپیمایی نیز افزایش یافت. پروژه های مدرن نظامی و طراحی خطوط هوایی در مقیاس بزرگی هستند که هر جنبه طراحی توسط تیم های مختلف مورد بررسی قرار می گیرد و سپس گرد هم می آیند. در هوانوردی عمومی تعداد زیادی از هواپیماهای سبک توسط علاقمندان و علاقمندان آماتور طراحی و ساخته می شوند.
طراحی هواپیما به کمک کامپیوتر
سطوح خارجی هواپیما مدل سازی شده در متلب
بال هواپیمای بال ثابت، بالابر لازم برای پرواز را فراهم می کند. هندسه بال بر هر جنبه ای از پرواز هواپیما تأثیر می گذارد. منطقه بال معمولاً توسط سرعت توقف مورد نظر تعیین می شود، اما شکل کلی پلان فرم و سایر جنبه های جزئیات ممکن است تحت تأثیر عوامل چیدمان بال قرار گیرد بال را می توان در موقعیت های بالا، پایین و وسط به بدنه سوار کرد. طراحی بال به پارامترهای زیادی مانند انتخاب نسبت ابعاد، نسبت مخروطی، زاویه برگشت، نسبت ضخامت، نمایه مقطع، شستشو و دو وجهی بستگی دارد. شکل مقطع بال، ایرفویل آن است.ساخت بال با دنده ای شروع می شود که شکل ایرفویل را مشخص می کند. دنده ها را می توان از چوب، فلز، پلاستیک یا حتی کامپوزیت ساخت
بال باید طوری طراحی و آزمایش شود که بتواند حداکثر بارهای تحمیل شده توسط مانورها و وزش های جوی را تحمل کند.
موتور هواپیما در حال آزمایش در تونل باد
نیروی محرکه هواپیما ممکن است توسط موتورهای هواپیما طراحی شده خاص، موتورهای خودکار، موتور سیکلت یا اتومبیل برفی، موتورهای الکتریکی یا حتی قدرت عضلانی انسان به دست آید. پارامترهای اصلی طراحی موتور عبارتند از
حداکثر نیروی رانش موتور در دسترس است
مصرف سوخت
جرم موتور
هندسه موتور
رانش ارائه شده توسط موتور باید کشش را در سرعت کروز متعادل کند و بیشتر از درگ باشد تا امکان شتاب گیری فراهم شود. موتور مورد نیاز با نوع هواپیما متفاوت است. به عنوان مثال، هواپیماهای تجاری زمان بیشتری را در سرعت کروز صرف می کنند و به کارایی موتور بیشتری نیاز دارند. جت های جنگنده با کارایی بالا به شتاب بسیار بالایی نیاز دارند و بنابراین نیاز به رانش بسیار بالایی دارند.
ارابه فرود
وزن ناخالص هواپیما
وزن هواپیما عامل مشترکی است که تمام جنبه های طراحی هواپیما مانند آیرودینامیک، ساختار و نیروی محرکه را به هم مرتبط می کند. وزن هواپیما از عوامل مختلفی مانند وزن خالی، بار مفید، بار مفید و غیره به دست میآید. وزنهای مختلف برای محاسبه مرکز جرم کل هواپیما استفاده میشود. مرکز جرم باید در محدوده تعیین شده توسط سازنده قرار گیرد.
ساختار
ساختار هواپیما نه تنها بر استحکام، آئروالاستیسیته، دوام، تحمل آسیب، پایداری، بلکه بر ایمنی در برابر شکست، مقاومت در برابر خوردگی، قابلیت نگهداری و سهولت ساخت تمرکز دارد. سازه باید بتواند تنش های ناشی از فشار کابین، در صورت نصب، تلاطم و ارتعاشات موتور یا روتور را تحمل کند.
فرآیند طراحی و شبیه سازی
طراحی هر هواپیما در سه مرحله شروع می شود
طراحی مفهومی
طراحی مفهومی
طراحی مفهومی هواپیما شامل ترسیم انواع پیکربندی های ممکن است که مشخصات طراحی مورد نیاز را برآورده می کند. با ترسیم مجموعهای از پیکربندیها، طراحان به دنبال دستیابی به پیکربندی طراحی هستند که به طور رضایتبخشی همه الزامات را برآورده میکند و همچنین با عواملی مانند آیرودینامیک، نیروی محرکه، عملکرد پرواز، ساختار و سیستمهای کنترل همراه است. به این بهینه سازی طراحی می گویند. جنبه های اساسی مانند شکل بدنه، پیکربندی و مکان بال، اندازه و نوع موتور همگی در این مرحله تعیین می شوند. محدودیتهای طراحی مانند موارد ذکر شده در بالا همگی در این مرحله در نظر گرفته میشوند. محصول نهایی یک طرح مفهومی از پیکربندی هواپیما بر روی کاغذ یا صفحه کامپیوتر است که باید توسط مهندسان و دیگر طراحان بررسی شود.
مرحله طراحی اولیه
پیکربندی طراحی که در مرحله طراحی مفهومی به دست آمد، سپس بهینه سازی و بازسازی می شود تا در پارامترهای طراحی قرار گیرد. در این مرحله آزمایش تونل باد و محاسبات دینامیکی سیالات محاسباتی میدان جریان اطراف هواپیما انجام می شود. ماجو
تجزیه و تحلیل ساختاری و کنترلی نیز در این مرحله انجام می شود. ایرادات آیرودینامیکی و ناپایداری های سازه ای در صورت وجود اصلاح و طرح نهایی ترسیم و نهایی می شود. سپس پس از نهایی شدن طراحی، تصمیم کلیدی با سازنده یا فردی است که آن را طراحی می کند که آیا واقعاً تولید هواپیما را ادامه دهد. در این مرحله، چندین طرح، اگرچه کاملاً قابلیت پرواز و عملکرد را دارند، ممکن است به دلیل غیرقابل تحمل بودن از تولید خارج شوند.
مرحله طراحی جزئیات
این مرحله صرفاً به جنبه ساخت هواپیمای تولیدی می پردازد. تعداد، طرح و محل دنده ها، اسپارها، مقاطع و سایر عناصر ساختاری را تعیین می کند تمام جنبه های آیرودینامیکی، ساختاری، پیشرانه، کنترل و عملکرد قبلاً در مرحله طراحی اولیه پوشش داده شده است و فقط ساخت آن باقی مانده است. شبیه سازهای پرواز برای هواپیما نیز در این مرحله توسعه یافته است.
-
rohamavation
نام: roham hesami radرهام حسامی راد
محل اقامت: 100 مایلی شمال لندن جاده آیلستون، لستر، لسترشر. LE2
عضویت : سهشنبه ۱۳۹۹/۸/۲۰ - ۰۸:۳۴
پست: 3278-
سپاس: 5494
- جنسیت:
تماس:
Re: هوافضا
چرخش دایرهای بخشی از سیال حول یک محور ثابت گفته میشود. این چرخش منجر به مکیدن اجزایی میشود که در اطراف سیالِ در حال چرخش قرار دارد. سرعت چرخش جریان در مرکز بیشترین مقدار بوده و با فاصله گرفتن از آن کاهش مییابد. در بیشتر موارد این جریانهای توربولانس(Turbulent Flow) یا متلاطم هستند که منجر به ایجاد ورتکس میشوند چون جریان توربولانس در مکانیک به حرکت سیال در حالتی اطلاق میشود که در آن حرکت ذرات بهصورت تصادفی است در این نوع از حرکت، ذرات سیال در راستای عمود بر مسیر حرکت نیز با هم مخلوط شده و حرکتی تصادفی را ایجاد میکنند. , و عددرینولدز ، مبتنی بر تجزیه و تحلیل ابعادی ، که در نظر گرفته شده است برای مقایسه جریانهای واقع گرایانه و چسبناک استفاده شود, ما می دانیم که تعداد رینولدز $R_e=\frac{\rho vd}{\eta}$ است (تراکم ρ ، سرعت v ، قطر d و η ویسکوزیته سیال).خوب توجه کنید فرض کنید شما در حال حرکت جسمی با سطح مقطع A با سرعت v از طریق سیال چگالی ρ هستید. هر ثانیه حجم $V = Av$ را بیرون می کشید و جرم مایع موجود در آن حجم $m = \rho Av$ است.برای اینکه مایعات از مسیر خارج شود باید آن را تسریع کنید ، که به نیرو نیاز دارد و این نیرو تبدیل به نیروی اینرسی خواهد شد. بیایید فرض کنیم که شما باید مایعات را شتاب دهید تا با سرعت v خود مطابقت داشته باشد ، سپس تغییر حرکت mv است و استفاده از معادله برای m از تغییر حرکت در ثانیه:$\Delta p = \rho A v^2$
اما سرعت تغییر حرکت فقط نیرو است ، بنابراین نتیجه نهایی ما این است که نیروی اینرسی ناشی از حرکت از طریق سیال:$F = \rho A v^2$ در نهایت با تقسیم بر ویسکوزیته $R_e=\dfrac{\text{inertial force}}{\text{force of viscosity}}$می رسیم .
معمولا روی صفحات کمپرسور موتورهای جت,ورتکس تشکیل میشود. هنگامی که هواپیما روی زمین در حال حرکت است یک سمت از گردابه به موتور متصل بوده و سمت دیگر آن به زمین اتصال دارد. گردابه ایجاد شده میتواند سنگ و یا دیگر اشیاء کوچک را به درون موتور هدایت کند.برای همین پرنده به درومن کشیده شده یا در هنگام روش بودن موتور باید ایمنی حفظ شود
هوای چرخشی سریع در نزدیکی محور با نیروی گریز از مرکز روبرو می شود ، یعنی هوا از محور دور شده و منطقه ای از فشار قوی را تشکیل می دهد. در این منطقه ، هوا منبسط می شود و بنابراین ، سرد می شود. اگر رطوبت هوا به اندازه کافی زیاد باشد ، این می تواند باعث متراکم شدن آب شود. .
، این اتفاق می افتد اگر هوای اطراف به آرامی بچرخد. این معمولاً اتفاق می افتد ، زیرا باد از هواپیما منحرف می شود ، به این معنی که جهت خود را تغییر می دهد ، که نوعی چرخش است.
و البته ، جریان هوای قوی و غیر یکنواخت از عقب ، همانطور که توسط رانشگرهای معکوس تولید می شود ، می تواند باعث چرخش هوای چرخشی بیشتر یا قوی تر شود ، که منجر به رئوس قوی تر می شود.
مجموعهای از ورتکسهای کوچک در لبه انتهایی ایرفویل یا پره هواپیما تشکیل میشوند. معمولا این ورتکسها در هنگام تولید نیروی برا (لیفت) در ایرفویل یا تولید پیشرانش در پرهها ایجاد میشوند. در چنین شرایطی در فاصلهای کمتر از طول یک «کورد» (Chord) در پشت ایرفویل این مجموعه گردابهها یکپارچه شده و تشکیل یک گردابه واحد را میدهند.$\large \overrightarrow {\omega} = \nabla × \overrightarrow {u}$توجه کرده $\frac{\partial \mathbf{\omega}}{\partial t} + \mathbf{u}\cdot \nabla \mathbf{\omega} = \mathbf{\omega} \cdot \nabla \mathbf{u} + \nu \nabla^2 \mathbf{\omega},$برای مایعات غیرقابل انعطاف ، گرداب که حاکم بر تکامل مکانی و زمانی گردابه است زیرا با جریان همرفت می شود ، توسط ویسکوزیته پخش می شود و با کشش و کج شدن خطوط گرداب شدت می یابد. در اینجا پارامتر $\nu$ ویسکوزیته حرکتی است.
و علت بخار سفید دیده شدن ان پس از تشکیل گرداب ، فشار داخل آن در مقایسه با فشار محیط به طور قابل توجهی کاهش می یابد. این منجر به افت قابل توجهی در نقطه شبنم می شود (که پیش از تشکیل گرداب در زیر دمای محیط قرار داشت) اما همراه با آن ، حتی افت بیشتری در دمای هسته راس وجود دارد که بخار آب را به قطرات آب تبدیل می کند و از این رو ما می توانیم دنباله گردابه ها را از صفحات انتهایی عقب ببینیم.
Wake Vortex Turbulence به تلاطمی گفته می شود که در اثر عبور هواپیما هنگام پرواز ایجاد می شود. هنگامی که چرخ دنده فرود هواپیما زمین را ترک می کند ، از نقطه ای تولید می شود و هنگام لمس چرخ دنده فرود بینی هنگام فرود ، تولید آن متوقف می شود. در جاهایی که هواپیمای دیگری با چنین تلاطمی روبرو می شود ، گفته می شود Wake Vortex Encounter (WVE) رخ داده است.شرح
تلاطم های خطرناک بالقوه متعاقب هواپیما در حال پرواز عمدتا توسط گرداب های نوک بال ایجاد می شود. این نوع تلاطم قابل توجه است زیرا گردابه های نوک بال کاملاً آهسته خراب می شوند و می توانند تأثیر چرخشی قابل توجهی روی هواپیمایی که چند دقیقه پس از تولید با آن روبرو می شود ، ایجاد کنند. جت افلاکس و پروپ واش همچنین می توانند کنترل هواپیما را هم در زمین و هم در هوا به خطر بیندازند اما ، در حالی که این تأثیرات غالباً شدید هستند ، اما اثرات آنها کوتاه مدت است.
منشا چرخش های چرخشی نوک بال ضد چرخش نتیجه مستقیم و خودکار تولید بالابر توسط بال است. لیفت با ایجاد یک دیفرانسیل فشار روی سطح بال ایجاد می شود. کمترین فشار روی سطح بالایی بال و بیشترین فشار در زیر بال رخ می دهد. این دیفرانسیل فشار باعث جمع شدن جریان هوا در پشت بال می شود و در نتیجه توده های هوای چرخشی در پایین دست نوک بال قرار می گیرند. پس از اتمام رول کردن ، بیدار شامل دو گرداب استوانه ای ضد چرخش است
ورتکس هایی که در نوک بالهای هواپیمای بال ثابت هوابرد ایجاد می شوند یا از روتورهای هلی کوپتر در پرواز رو به جلو ، تلاطم چرخشی گذرا ایجاد می کنند ، که در عقب هواپیما در جهت باد پایین و پایین دنبال می شود ، و ممکن است ناگهانی غیرقابل کنترل شود رول کنید تا هواپیمای زیر را تحت تأثیر قرار دهید ، شاید با سرعت چرخش کافی برای قطع شدن خلبان اتوماتیک در صورت درگیری. هواپیماهای سبک ممکن است هنگام عبور از گرداب از کنار ، مانند چرخش نهایی از پایه پایه در پشت هواپیمای بزرگتر ، لحظات پیچش مشخصی را ایجاد کنند.
مقابله با لحظه رول القایی با استفاده از کنترل رول طبیعی (aileron و رول اسپویلر) معمولاً م effectiveثر است مگر در مواردی که طول بالها و ailerons هواپیمای آسیب دیده فراتر از جریان چرخشی دو گرداب نباشد (این می تواند هنگامی رخ دهد که هواپیمای زیر بسیار کوچکتر باشد نسبت به هواپیمای پیشرو) ، یا جایی که یک بال در گرداب به اندازه کافی قوی قرار دارد ، ممکن است قدرت بالگرد کافی از بال باقیمانده وجود نداشته باشد.
حداقل فاصله تفکیک ترافیک برای هواپیماهای تحت کنترل ATC به طور مداوم به اندازه کافی نشان داده شده است تا اطمینان حاصل شود که از دست دادن کنترل ناشی از برخورد با تلاطم بیدار ، همیشه گذرا بوده و به راحتی قابل بازیابی است ، به استثنای برخی از موارد فاصله در نزدیکی زمین یا زمین صعود اولیه پس از برخاستن. برای پوشش این شرایط و تغییر مکانهای مختلف پیچیده تر استفاده از باند ، حداقل فاصله و زمان جداسازی توسط ICAO اعلام شده است.در پرواز
گردابه ها به جای شروع چرخش از (Vr) آغاز می شوند و بنابراین جدایی باید براساس زمان بین چرخش هواپیماهای پی در پی باشد. با این حال ، به دلایل عملی ، ATC زمان خود را برای جداسازی بر اساس زمان رول تنظیم می کند. یک هواپیمای سنگین تر ممکن است نسبت به هواپیمای زیر طول پرواز بلندتر یا کندتری داشته باشد و از این طریق زمان واقعی جدایی را کاهش می دهد.به طور خلاصه ، در امتداد بیشتر بال ، هوای عبوری از بال و هوایی که از زیر آن عبور می کند کاملاً تمیز توسط بال جدا شده اند و هنگام وارد شدن مجدد ، در حالی که تلاطم قابل توجهی ایجاد می شود (ایجاد "کشش القایی") ، کیفیت چرخشی بسیار کمی دارد به آن یک صفحه هوا از بالای بال با یک ورق هوا از پایین روبرو می شود ، جایی که مخلوط می شود و ته می گیرد.
با این حال ، در نوک بال ، یک حد فاحش بین هوا وجود دارد که توسط بال و هوا جدا نمی شود. هوایی که از بالای نوک بال عبور می کند ، به طور معمول هنگام خروج از بال ، به سمت پایین هدایت می شود ، مانند بقیه بال ، و در نوک بال این نیروی رو به پایین ، علاوه بر دیفرانسیل فشار در نوک بال ، (فشار بالاتر تحت بال به دنبال برابر شدن با فشار پایین بالاتر از آن با حرکت در اطراف نوک بال است) ، باعث ایجاد چرخش در ستون هوا در پشت نوک بال می شود. در جهت عقربه های ساعت در بال چپ ، ساعت مقابل در سمت راست:چرخش هوا باعث ایجاد فشار کمتری در مرکز ستون می شود ، مانند چشم طوفان ، و وقتی شرایط هوا کاملاً مناسب باشد ، این کاهش فشار در مرکز گرداب می تواند باعث ایجاد کنترل شود چون رطوبت هوا به مه متراکم می شود. هرچه نیروی بالابری که توسط بال تولید می شود بیشتر باشد ، این گرداب ها می توانند قویتر و در نتیجه بزرگتر باشند. گرداب های نوک تیز در پشت هواپیماهای بزرگ تجاری می توانند کیلومترها پشت هواپیمای مسافرتی گسترش یابند و در پی آنها مشکلاتی برای صنایع کوچک به ویژه در الگوهای ترافیکی فرودگاه ایجاد کنند.
زاویه انحراف. اگر بالابر برابر با جرم هواپیما باشد (همانطور که باید باشد) ، هواپیماهای سنگین باید سرعت هوای بیشتری (دهانه وسیع تر) داشته باشند یا هوا را بیشتر (زاویه انحراف بالاتر) نسبت به هواپیماهای سبک با همان سرعت شتاب دهند. زاویه انحراف بالاتر گردابه های قدرتمندتری تولید می کند. به همین دلیل ، یک هواپیمای سنگین با سرعت کم و با یک بازوی بال قوی ، قوی ترین گردابه ها را تولید می کند.
لیفت متناسب با جرم هوایی است که از آن عبور می کند در واحد زمان نسبت به زاویه انحراف. اگر بالابر برابر با جرم هواپیما باشد (همانطور که باید باشد) ، هواپیماهای سنگین باید سرعت هوای بیشتری (دهانه وسیع تر) داشته باشند یا هوا را بیشتر (زاویه انحراف بالاتر) نسبت به هواپیماهای سبک با همان سرعت شتاب دهند. زاویه انحراف بالاتر گردابه های قدرتمندتری تولید می کند. به همین دلیل ، یک هواپیمای سنگین با سرعت کم و با یک بازوی بال قوی ، قوی ترین گردابه ها را تولید می کند.
از آنجا که هوای بیشتری از طریق جریان با سرعت پرواز بالاتر جریان می یابد ، پرواز سریعتر به انحراف کمتری نیاز دارد و گردابهای بیدار را ضعیف تر می کند. اگر هواپیما صعود کند ، با ارتفاع هوا از چگالی کمتری برخوردار می شود و جریان جرم کمتری بر روی بال وجود دارد ، بنابراین اگر سرعت پرواز تغییر نکند گرداب ها قویتر می شوند. به طور معمول ، هواپیما هنگام بالا رفتن شتاب می گیرد و اگر هواپیما در فشار دینامیکی ثابت پرواز کند ، قدرت گرداب ثابت خواهد ماند.
از گردابها به سه روش می توان جلوگیری کرد:
دهانه بال نامحدود (به معنای جریان جرم بی نهایت است ، بنابراین برای هیچگونه بالابری نیازی به انحراف نیست)
سرعت نامحدود (دوباره ، جریان جرم بی نهایت را می دهد)
بدون وزن هواپیما. پرواز با یک سهمی با صفر گرم تقریباً هیچ تلاطمی از خواب ایجاد نمی کند.
پایان گردابه ها
اینرسی باعث ادامه حرکت به سمت پایین و چرخش گردابه ها می شود ، اما اصطکاک باعث می شود طی چند دقیقه این حرکات هوا از بین بروند. اگر هواپیما پرواز بالایی داشته باشد ، مدتها قبل از برخورد به زمین بیدار می شود. با این وجود هواپیماهای کم پرواز به زمین برخورد کرده و منحرف می شوند. لوله گرداب اکنون مانند یک چرخ عمل می کند و شروع به حرکت به سمت خارج می کند ،
لیفت بال در درجه اول توسط دیفرانسیل فشار بین سطح پایین و بال بال ایجاد می شود. مولکول های هوا در زیر آن تحت فشار قرار گرفته اند و انهایی که نزدیک نوک بال هستند از اطراف بال فرار می کنند و به بیرون ، بالا و داخل راه می یابند و گرداب های نوک بال را ایجاد می کنند.
بالهای موجود در بسیاری از هواپیماهای مسافربری مدرن نیز با این هدف که پس از فرار از زیر بال ، تا حدی مانع از تشکیل گرداب های نوک بال می شوند ، اجازه نمی دهند مولکول های هوا به صورت مارپیچ وارد شوند.
Wake Turbulence یک اختلال در جو است که هنگام عبور از هوا در پشت هواپیما تشکیل می شود. این شامل اجزای مختلفی است که مهمترین آنها گرداب های نوک بال و جت واش است.
بنابراین ردپای توربولانس چیزی غیر از آشفتگی جوی ناشی از گرداب های نوک بال و تا حدودی دیگر ، اگزوز موتور جت نیست.
پس بالکت ها برای افزایش عملکرد هواپیما شده چون بال با ایجاد ناحیه فشار بالاتر در زیر و ناحیه فشار پایین بالاتر ، باعث ایجاد لیفت می شود.
در نوک بال ، مقداری هوا در اطراف نوک جریان می یابد و باعث کاهش دیفرانسیل فشار و در نتیجه کارایی بال می شود. این جریان عرضی نامیده می شود. نوک بال این جریان را کاهش می دهد ، بنابراین کارایی را بهبود می بخشد.
تأثیر نوک بال در واقع شبیه بلندتر شدن بال است ، اما از آنجا که نوک بال خود باعث ایجاد لیفت نمی شود ، استرس کمتری دارد و بنابراین می تواند سبک تر باشد
پس این فلنج روی موتور چیست؟آنها به هواپیما اجازه می دهند تا در سرعت های پایین تر ، بالابر بیشتری ایجاد کند ، که عواقب مثبتی از جمله سرعت پایین اصطکاک ، سرعت پایین آمدن ، سرعت پایین آمدن و باند کوتاه را در پی دارد.اگر ناسل ها از نزدیک زیر بال هواپیما سوار شده اند باید از استراک استفاده شودوبا چیدمان بهینه و در زاویه های بالای حمله ، چنین مولدهای گرداب که به Nacelle strakes یا chines معروف هستند ، گرداب قدرتمندی را تولید می کنند که از روی بال جریان می یابد ، جایی که در یک تخته جلوی بال گفته شده ، تاخیر در جدا شدن جریان هوا وجود دارد تا هواپیما در زوایای حمله بیشتری پرواز می کند.
تیغه های Vortex generator بر روی بال چه کاربردی دارند.زمانی که جریان هوا شروع به حرکت از روی بال هواپیما میکند به دلیل کاهش فشار، هوا به سمت نقطه ای از سطح بال که دارای حداکثر انحنا میباشد شتاب میگیرد. در طول این مسیر لایه مرزی آرام میباشد. پس از عبور از این نقطه، فشار هوا افزایش یافته و در نتیجه جریان هوا از منطقه کم فشار به سمت منطقه پرفشار فرستاده میشود.
مشکلی که به وجود میآید این است که طبق قانون طبیعت همیشه هوا تمایل به حرکت از منطقه پرفشار به سمت منطقه کم فشار را دارد اما در این مرحله جریان هوا از منطقه کم فشار به سمت منطقه پرفشار انتقال داده میشود. این امر باعث ایجاد Adverse pressure gradient شده و لایه مرزی را متلاطم میکند.
زمانی که لایه مرزی متلاطم شود در حقیقت انرژی در داخل این جریان متلاطم هدر رفته و از دست میرود و باعث ایجاد نوعی اصطکاک به نام Skin friction drag میشود که در نهایت باعث جدا شدن جریان هوا از روی بال میگردد.
این جدا شدن به خصوص در زمانی که هواپیما در حال پرواز در سرعتهای پایین میباشد، به عنوان مثال به هنگام تقرب نهایی جهت انجام فرود، میتواند باعث ایجاد Stall گردد. Stall یا واماندگی به معنی از دست دادن نیروی Lift میباشد. به بیان کلی تر ، یک مولد گرداب یک صفحه زاویه دار کوچک است که روی سطح خارجی بدنه آیرودینامیکی نصب شده است. زاویه صفحه باعث چرخیدن هوا می شود و در پشت آن گرداب ایجاد می کند. این اثر باعث می شود جریان هوا حتی در نقاطی که جریان بدون گرداب از سطح جدا شود ، به سطح "متصل" بماند.
یکی از متداول ترین کاربردهای مولدهای گرداب ، استفاده از بالهای هواپیما به سمت جلو ailerons است. وقتی بال هواپیما متوقف می شود ، جریان از بال جدا می شود. این بدان معناست که جریان قبل از رسیدن به آیلرون ها جدا شده و آنها را بی اثر می کند. استفاده از ژنراتورهای گرداب به هواپیماسازها کمک می کند تا کنترل را انجام دهند حتی اگر بقیه بال متوقف شود.
برای بالا بردن کارایی هواپیما از تیغه های کوچکی به نام Vortex generator بر روی بال هواپیماها استفاده میشود.
اما سرعت تغییر حرکت فقط نیرو است ، بنابراین نتیجه نهایی ما این است که نیروی اینرسی ناشی از حرکت از طریق سیال:$F = \rho A v^2$ در نهایت با تقسیم بر ویسکوزیته $R_e=\dfrac{\text{inertial force}}{\text{force of viscosity}}$می رسیم .
معمولا روی صفحات کمپرسور موتورهای جت,ورتکس تشکیل میشود. هنگامی که هواپیما روی زمین در حال حرکت است یک سمت از گردابه به موتور متصل بوده و سمت دیگر آن به زمین اتصال دارد. گردابه ایجاد شده میتواند سنگ و یا دیگر اشیاء کوچک را به درون موتور هدایت کند.برای همین پرنده به درومن کشیده شده یا در هنگام روش بودن موتور باید ایمنی حفظ شود
هوای چرخشی سریع در نزدیکی محور با نیروی گریز از مرکز روبرو می شود ، یعنی هوا از محور دور شده و منطقه ای از فشار قوی را تشکیل می دهد. در این منطقه ، هوا منبسط می شود و بنابراین ، سرد می شود. اگر رطوبت هوا به اندازه کافی زیاد باشد ، این می تواند باعث متراکم شدن آب شود. .
، این اتفاق می افتد اگر هوای اطراف به آرامی بچرخد. این معمولاً اتفاق می افتد ، زیرا باد از هواپیما منحرف می شود ، به این معنی که جهت خود را تغییر می دهد ، که نوعی چرخش است.
و البته ، جریان هوای قوی و غیر یکنواخت از عقب ، همانطور که توسط رانشگرهای معکوس تولید می شود ، می تواند باعث چرخش هوای چرخشی بیشتر یا قوی تر شود ، که منجر به رئوس قوی تر می شود.
مجموعهای از ورتکسهای کوچک در لبه انتهایی ایرفویل یا پره هواپیما تشکیل میشوند. معمولا این ورتکسها در هنگام تولید نیروی برا (لیفت) در ایرفویل یا تولید پیشرانش در پرهها ایجاد میشوند. در چنین شرایطی در فاصلهای کمتر از طول یک «کورد» (Chord) در پشت ایرفویل این مجموعه گردابهها یکپارچه شده و تشکیل یک گردابه واحد را میدهند.$\large \overrightarrow {\omega} = \nabla × \overrightarrow {u}$توجه کرده $\frac{\partial \mathbf{\omega}}{\partial t} + \mathbf{u}\cdot \nabla \mathbf{\omega} = \mathbf{\omega} \cdot \nabla \mathbf{u} + \nu \nabla^2 \mathbf{\omega},$برای مایعات غیرقابل انعطاف ، گرداب که حاکم بر تکامل مکانی و زمانی گردابه است زیرا با جریان همرفت می شود ، توسط ویسکوزیته پخش می شود و با کشش و کج شدن خطوط گرداب شدت می یابد. در اینجا پارامتر $\nu$ ویسکوزیته حرکتی است.
و علت بخار سفید دیده شدن ان پس از تشکیل گرداب ، فشار داخل آن در مقایسه با فشار محیط به طور قابل توجهی کاهش می یابد. این منجر به افت قابل توجهی در نقطه شبنم می شود (که پیش از تشکیل گرداب در زیر دمای محیط قرار داشت) اما همراه با آن ، حتی افت بیشتری در دمای هسته راس وجود دارد که بخار آب را به قطرات آب تبدیل می کند و از این رو ما می توانیم دنباله گردابه ها را از صفحات انتهایی عقب ببینیم.
Wake Vortex Turbulence به تلاطمی گفته می شود که در اثر عبور هواپیما هنگام پرواز ایجاد می شود. هنگامی که چرخ دنده فرود هواپیما زمین را ترک می کند ، از نقطه ای تولید می شود و هنگام لمس چرخ دنده فرود بینی هنگام فرود ، تولید آن متوقف می شود. در جاهایی که هواپیمای دیگری با چنین تلاطمی روبرو می شود ، گفته می شود Wake Vortex Encounter (WVE) رخ داده است.شرح
تلاطم های خطرناک بالقوه متعاقب هواپیما در حال پرواز عمدتا توسط گرداب های نوک بال ایجاد می شود. این نوع تلاطم قابل توجه است زیرا گردابه های نوک بال کاملاً آهسته خراب می شوند و می توانند تأثیر چرخشی قابل توجهی روی هواپیمایی که چند دقیقه پس از تولید با آن روبرو می شود ، ایجاد کنند. جت افلاکس و پروپ واش همچنین می توانند کنترل هواپیما را هم در زمین و هم در هوا به خطر بیندازند اما ، در حالی که این تأثیرات غالباً شدید هستند ، اما اثرات آنها کوتاه مدت است.
منشا چرخش های چرخشی نوک بال ضد چرخش نتیجه مستقیم و خودکار تولید بالابر توسط بال است. لیفت با ایجاد یک دیفرانسیل فشار روی سطح بال ایجاد می شود. کمترین فشار روی سطح بالایی بال و بیشترین فشار در زیر بال رخ می دهد. این دیفرانسیل فشار باعث جمع شدن جریان هوا در پشت بال می شود و در نتیجه توده های هوای چرخشی در پایین دست نوک بال قرار می گیرند. پس از اتمام رول کردن ، بیدار شامل دو گرداب استوانه ای ضد چرخش است
ورتکس هایی که در نوک بالهای هواپیمای بال ثابت هوابرد ایجاد می شوند یا از روتورهای هلی کوپتر در پرواز رو به جلو ، تلاطم چرخشی گذرا ایجاد می کنند ، که در عقب هواپیما در جهت باد پایین و پایین دنبال می شود ، و ممکن است ناگهانی غیرقابل کنترل شود رول کنید تا هواپیمای زیر را تحت تأثیر قرار دهید ، شاید با سرعت چرخش کافی برای قطع شدن خلبان اتوماتیک در صورت درگیری. هواپیماهای سبک ممکن است هنگام عبور از گرداب از کنار ، مانند چرخش نهایی از پایه پایه در پشت هواپیمای بزرگتر ، لحظات پیچش مشخصی را ایجاد کنند.
مقابله با لحظه رول القایی با استفاده از کنترل رول طبیعی (aileron و رول اسپویلر) معمولاً م effectiveثر است مگر در مواردی که طول بالها و ailerons هواپیمای آسیب دیده فراتر از جریان چرخشی دو گرداب نباشد (این می تواند هنگامی رخ دهد که هواپیمای زیر بسیار کوچکتر باشد نسبت به هواپیمای پیشرو) ، یا جایی که یک بال در گرداب به اندازه کافی قوی قرار دارد ، ممکن است قدرت بالگرد کافی از بال باقیمانده وجود نداشته باشد.
حداقل فاصله تفکیک ترافیک برای هواپیماهای تحت کنترل ATC به طور مداوم به اندازه کافی نشان داده شده است تا اطمینان حاصل شود که از دست دادن کنترل ناشی از برخورد با تلاطم بیدار ، همیشه گذرا بوده و به راحتی قابل بازیابی است ، به استثنای برخی از موارد فاصله در نزدیکی زمین یا زمین صعود اولیه پس از برخاستن. برای پوشش این شرایط و تغییر مکانهای مختلف پیچیده تر استفاده از باند ، حداقل فاصله و زمان جداسازی توسط ICAO اعلام شده است.در پرواز
گردابه ها به جای شروع چرخش از (Vr) آغاز می شوند و بنابراین جدایی باید براساس زمان بین چرخش هواپیماهای پی در پی باشد. با این حال ، به دلایل عملی ، ATC زمان خود را برای جداسازی بر اساس زمان رول تنظیم می کند. یک هواپیمای سنگین تر ممکن است نسبت به هواپیمای زیر طول پرواز بلندتر یا کندتری داشته باشد و از این طریق زمان واقعی جدایی را کاهش می دهد.به طور خلاصه ، در امتداد بیشتر بال ، هوای عبوری از بال و هوایی که از زیر آن عبور می کند کاملاً تمیز توسط بال جدا شده اند و هنگام وارد شدن مجدد ، در حالی که تلاطم قابل توجهی ایجاد می شود (ایجاد "کشش القایی") ، کیفیت چرخشی بسیار کمی دارد به آن یک صفحه هوا از بالای بال با یک ورق هوا از پایین روبرو می شود ، جایی که مخلوط می شود و ته می گیرد.
با این حال ، در نوک بال ، یک حد فاحش بین هوا وجود دارد که توسط بال و هوا جدا نمی شود. هوایی که از بالای نوک بال عبور می کند ، به طور معمول هنگام خروج از بال ، به سمت پایین هدایت می شود ، مانند بقیه بال ، و در نوک بال این نیروی رو به پایین ، علاوه بر دیفرانسیل فشار در نوک بال ، (فشار بالاتر تحت بال به دنبال برابر شدن با فشار پایین بالاتر از آن با حرکت در اطراف نوک بال است) ، باعث ایجاد چرخش در ستون هوا در پشت نوک بال می شود. در جهت عقربه های ساعت در بال چپ ، ساعت مقابل در سمت راست:چرخش هوا باعث ایجاد فشار کمتری در مرکز ستون می شود ، مانند چشم طوفان ، و وقتی شرایط هوا کاملاً مناسب باشد ، این کاهش فشار در مرکز گرداب می تواند باعث ایجاد کنترل شود چون رطوبت هوا به مه متراکم می شود. هرچه نیروی بالابری که توسط بال تولید می شود بیشتر باشد ، این گرداب ها می توانند قویتر و در نتیجه بزرگتر باشند. گرداب های نوک تیز در پشت هواپیماهای بزرگ تجاری می توانند کیلومترها پشت هواپیمای مسافرتی گسترش یابند و در پی آنها مشکلاتی برای صنایع کوچک به ویژه در الگوهای ترافیکی فرودگاه ایجاد کنند.
زاویه انحراف. اگر بالابر برابر با جرم هواپیما باشد (همانطور که باید باشد) ، هواپیماهای سنگین باید سرعت هوای بیشتری (دهانه وسیع تر) داشته باشند یا هوا را بیشتر (زاویه انحراف بالاتر) نسبت به هواپیماهای سبک با همان سرعت شتاب دهند. زاویه انحراف بالاتر گردابه های قدرتمندتری تولید می کند. به همین دلیل ، یک هواپیمای سنگین با سرعت کم و با یک بازوی بال قوی ، قوی ترین گردابه ها را تولید می کند.
لیفت متناسب با جرم هوایی است که از آن عبور می کند در واحد زمان نسبت به زاویه انحراف. اگر بالابر برابر با جرم هواپیما باشد (همانطور که باید باشد) ، هواپیماهای سنگین باید سرعت هوای بیشتری (دهانه وسیع تر) داشته باشند یا هوا را بیشتر (زاویه انحراف بالاتر) نسبت به هواپیماهای سبک با همان سرعت شتاب دهند. زاویه انحراف بالاتر گردابه های قدرتمندتری تولید می کند. به همین دلیل ، یک هواپیمای سنگین با سرعت کم و با یک بازوی بال قوی ، قوی ترین گردابه ها را تولید می کند.
از آنجا که هوای بیشتری از طریق جریان با سرعت پرواز بالاتر جریان می یابد ، پرواز سریعتر به انحراف کمتری نیاز دارد و گردابهای بیدار را ضعیف تر می کند. اگر هواپیما صعود کند ، با ارتفاع هوا از چگالی کمتری برخوردار می شود و جریان جرم کمتری بر روی بال وجود دارد ، بنابراین اگر سرعت پرواز تغییر نکند گرداب ها قویتر می شوند. به طور معمول ، هواپیما هنگام بالا رفتن شتاب می گیرد و اگر هواپیما در فشار دینامیکی ثابت پرواز کند ، قدرت گرداب ثابت خواهد ماند.
از گردابها به سه روش می توان جلوگیری کرد:
دهانه بال نامحدود (به معنای جریان جرم بی نهایت است ، بنابراین برای هیچگونه بالابری نیازی به انحراف نیست)
سرعت نامحدود (دوباره ، جریان جرم بی نهایت را می دهد)
بدون وزن هواپیما. پرواز با یک سهمی با صفر گرم تقریباً هیچ تلاطمی از خواب ایجاد نمی کند.
پایان گردابه ها
اینرسی باعث ادامه حرکت به سمت پایین و چرخش گردابه ها می شود ، اما اصطکاک باعث می شود طی چند دقیقه این حرکات هوا از بین بروند. اگر هواپیما پرواز بالایی داشته باشد ، مدتها قبل از برخورد به زمین بیدار می شود. با این وجود هواپیماهای کم پرواز به زمین برخورد کرده و منحرف می شوند. لوله گرداب اکنون مانند یک چرخ عمل می کند و شروع به حرکت به سمت خارج می کند ،
لیفت بال در درجه اول توسط دیفرانسیل فشار بین سطح پایین و بال بال ایجاد می شود. مولکول های هوا در زیر آن تحت فشار قرار گرفته اند و انهایی که نزدیک نوک بال هستند از اطراف بال فرار می کنند و به بیرون ، بالا و داخل راه می یابند و گرداب های نوک بال را ایجاد می کنند.
بالهای موجود در بسیاری از هواپیماهای مسافربری مدرن نیز با این هدف که پس از فرار از زیر بال ، تا حدی مانع از تشکیل گرداب های نوک بال می شوند ، اجازه نمی دهند مولکول های هوا به صورت مارپیچ وارد شوند.
Wake Turbulence یک اختلال در جو است که هنگام عبور از هوا در پشت هواپیما تشکیل می شود. این شامل اجزای مختلفی است که مهمترین آنها گرداب های نوک بال و جت واش است.
بنابراین ردپای توربولانس چیزی غیر از آشفتگی جوی ناشی از گرداب های نوک بال و تا حدودی دیگر ، اگزوز موتور جت نیست.
پس بالکت ها برای افزایش عملکرد هواپیما شده چون بال با ایجاد ناحیه فشار بالاتر در زیر و ناحیه فشار پایین بالاتر ، باعث ایجاد لیفت می شود.
در نوک بال ، مقداری هوا در اطراف نوک جریان می یابد و باعث کاهش دیفرانسیل فشار و در نتیجه کارایی بال می شود. این جریان عرضی نامیده می شود. نوک بال این جریان را کاهش می دهد ، بنابراین کارایی را بهبود می بخشد.
تأثیر نوک بال در واقع شبیه بلندتر شدن بال است ، اما از آنجا که نوک بال خود باعث ایجاد لیفت نمی شود ، استرس کمتری دارد و بنابراین می تواند سبک تر باشد
پس این فلنج روی موتور چیست؟آنها به هواپیما اجازه می دهند تا در سرعت های پایین تر ، بالابر بیشتری ایجاد کند ، که عواقب مثبتی از جمله سرعت پایین اصطکاک ، سرعت پایین آمدن ، سرعت پایین آمدن و باند کوتاه را در پی دارد.اگر ناسل ها از نزدیک زیر بال هواپیما سوار شده اند باید از استراک استفاده شودوبا چیدمان بهینه و در زاویه های بالای حمله ، چنین مولدهای گرداب که به Nacelle strakes یا chines معروف هستند ، گرداب قدرتمندی را تولید می کنند که از روی بال جریان می یابد ، جایی که در یک تخته جلوی بال گفته شده ، تاخیر در جدا شدن جریان هوا وجود دارد تا هواپیما در زوایای حمله بیشتری پرواز می کند.
تیغه های Vortex generator بر روی بال چه کاربردی دارند.زمانی که جریان هوا شروع به حرکت از روی بال هواپیما میکند به دلیل کاهش فشار، هوا به سمت نقطه ای از سطح بال که دارای حداکثر انحنا میباشد شتاب میگیرد. در طول این مسیر لایه مرزی آرام میباشد. پس از عبور از این نقطه، فشار هوا افزایش یافته و در نتیجه جریان هوا از منطقه کم فشار به سمت منطقه پرفشار فرستاده میشود.
مشکلی که به وجود میآید این است که طبق قانون طبیعت همیشه هوا تمایل به حرکت از منطقه پرفشار به سمت منطقه کم فشار را دارد اما در این مرحله جریان هوا از منطقه کم فشار به سمت منطقه پرفشار انتقال داده میشود. این امر باعث ایجاد Adverse pressure gradient شده و لایه مرزی را متلاطم میکند.
زمانی که لایه مرزی متلاطم شود در حقیقت انرژی در داخل این جریان متلاطم هدر رفته و از دست میرود و باعث ایجاد نوعی اصطکاک به نام Skin friction drag میشود که در نهایت باعث جدا شدن جریان هوا از روی بال میگردد.
این جدا شدن به خصوص در زمانی که هواپیما در حال پرواز در سرعتهای پایین میباشد، به عنوان مثال به هنگام تقرب نهایی جهت انجام فرود، میتواند باعث ایجاد Stall گردد. Stall یا واماندگی به معنی از دست دادن نیروی Lift میباشد. به بیان کلی تر ، یک مولد گرداب یک صفحه زاویه دار کوچک است که روی سطح خارجی بدنه آیرودینامیکی نصب شده است. زاویه صفحه باعث چرخیدن هوا می شود و در پشت آن گرداب ایجاد می کند. این اثر باعث می شود جریان هوا حتی در نقاطی که جریان بدون گرداب از سطح جدا شود ، به سطح "متصل" بماند.
یکی از متداول ترین کاربردهای مولدهای گرداب ، استفاده از بالهای هواپیما به سمت جلو ailerons است. وقتی بال هواپیما متوقف می شود ، جریان از بال جدا می شود. این بدان معناست که جریان قبل از رسیدن به آیلرون ها جدا شده و آنها را بی اثر می کند. استفاده از ژنراتورهای گرداب به هواپیماسازها کمک می کند تا کنترل را انجام دهند حتی اگر بقیه بال متوقف شود.
برای بالا بردن کارایی هواپیما از تیغه های کوچکی به نام Vortex generator بر روی بال هواپیماها استفاده میشود.

Re: هوافضا
سلام. واسه پیشرانه های فضایی و شاتل ها و روش های پرتاب و قرار گرفتن توی مدار میشه یه سری مطالب بزارین؟ ممنون

 The Night Tune
The Night Tune

-
rohamavation
نام: roham hesami radرهام حسامی راد
محل اقامت: 100 مایلی شمال لندن جاده آیلستون، لستر، لسترشر. LE2
عضویت : سهشنبه ۱۳۹۹/۸/۲۰ - ۰۸:۳۴
پست: 3278-
سپاس: 5494
- جنسیت:
تماس:
Re: هوافضا
سوالات:
در ابتدای گزیده کتاب درسی آمده است که سوخت با فشار زیاد به گاز تبدیل می شود. آیا این بدان معناست که طبق قضیه برنولی، سرعت گاز کم خواهد بود؟
اما آیا این واقعیت که یک رانش سرعت وجود دارد با عبارت فوق منافات ندارد؟
آیا شکل نازل مسئول این امر است؟
من فقط به این دو بخش با هم می پردازم. معادله برنولی در مورد چگونگی تغییر فشار و سرعت با حرکت یک بیت سیال در طول خط جریان است. از بقای انرژی آن بیت سیال ناشی می شود.
پس بیایید آن را دنبال کنیم. در ناحیه احتراق، گاز داغ و تحت فشار زیاد است، اما خیلی سریع حرکت نمی کند. سپس از نازل عبور می کند، جایی که گاز سرعت می گیرد و فشار کاهش می یابد. این در ابتدا زمانی به حد خود می رسد که فشار درست در انتهای نازل به فشار اتمسفر کاهش یابد. در آن نقطه گاز با حداکثر سرعت ممکن حرکت می کند و تا آنجا که ممکن است فشار احتراق به سرعت تبدیل شده است. (شما می خواهید که حداکثر فشار را به دست آورید)
در فضا، می توانید آن را جلوتر ببرید، اگزوز را به فشار کمتری برسانید و سرعت بیشتری بگیرید. سرعت بیشتر نیروی رانش بیشتر است. این مزیت داشتن یک موتور "خلاء" در مرحله بالایی موشک است.
راه دیگری برای فکر کردن به آن، بدون استفاده از معادله برنولی، بلکه به همان اندازه معتبر است، فکر کردن به گاز وسط نازل است. فشار زیاد از سمت محفظه احتراق و فشار بسیار کمتری از سمت اتمسفر/خلاء فشار می آورد. چه خواهد کرد؟ از محفظه احتراق به سمت خارج شتاب می گیرد و همانطور که می شود سرعت می گیرد.معادله برنلی فقط برای نقاطی که سیال زیر صوت سفر می کند قابل استفاده است. طبق اطلاعات من، بخش همگرا نازل/محفظه از برنلی استفاده می کند. با کاهش حجم محفظه، سرعت گاز افزایش می یابد. در نقطه ای که به سرعت مافوق صوت می رسد دیگر لزوماً اعمال نمی شود. بنابراین طراحی معمولی در اینجا متوقف می شود.
اگر بخواهیم همینطور ترک کنیم، متوجه میشویم که انرژی زیادی هنوز در گاز وجود دارد، زیرا وقتی موشک را ترک میکند، ستون تا حد زیادی در جهت شعاعی منبسط میشود. اکنون می توان انرژی اضافی را با استفاده از فشار گاز مافوق صوت برای شتاب بیشتر داس در جهت محوری مهار کرد.
حدس من این است که نیروی واکنشی از راه رفتن نازل استفاده می شود. تنها کاری که نازل باید انجام دهد این است که با سرعت کمتری نسبت به گاز به تنهایی منبسط شود. بنابراین یک لوله طولانی پس از حداکثر همگرایی تمام چیزی است که لازم است، که وقتی فشار گاز نزدیک به فشار اتمسفر است متوقف می شود.
در ابتدای گزیده کتاب درسی آمده است که سوخت با فشار زیاد به گاز تبدیل می شود. آیا این بدان معناست که طبق قضیه برنولی، سرعت گاز کم خواهد بود؟
اما آیا این واقعیت که یک رانش سرعت وجود دارد با عبارت فوق منافات ندارد؟
آیا شکل نازل مسئول این امر است؟
من فقط به این دو بخش با هم می پردازم. معادله برنولی در مورد چگونگی تغییر فشار و سرعت با حرکت یک بیت سیال در طول خط جریان است. از بقای انرژی آن بیت سیال ناشی می شود.
پس بیایید آن را دنبال کنیم. در ناحیه احتراق، گاز داغ و تحت فشار زیاد است، اما خیلی سریع حرکت نمی کند. سپس از نازل عبور می کند، جایی که گاز سرعت می گیرد و فشار کاهش می یابد. این در ابتدا زمانی به حد خود می رسد که فشار درست در انتهای نازل به فشار اتمسفر کاهش یابد. در آن نقطه گاز با حداکثر سرعت ممکن حرکت می کند و تا آنجا که ممکن است فشار احتراق به سرعت تبدیل شده است. (شما می خواهید که حداکثر فشار را به دست آورید)
در فضا، می توانید آن را جلوتر ببرید، اگزوز را به فشار کمتری برسانید و سرعت بیشتری بگیرید. سرعت بیشتر نیروی رانش بیشتر است. این مزیت داشتن یک موتور "خلاء" در مرحله بالایی موشک است.
راه دیگری برای فکر کردن به آن، بدون استفاده از معادله برنولی، بلکه به همان اندازه معتبر است، فکر کردن به گاز وسط نازل است. فشار زیاد از سمت محفظه احتراق و فشار بسیار کمتری از سمت اتمسفر/خلاء فشار می آورد. چه خواهد کرد؟ از محفظه احتراق به سمت خارج شتاب می گیرد و همانطور که می شود سرعت می گیرد.معادله برنلی فقط برای نقاطی که سیال زیر صوت سفر می کند قابل استفاده است. طبق اطلاعات من، بخش همگرا نازل/محفظه از برنلی استفاده می کند. با کاهش حجم محفظه، سرعت گاز افزایش می یابد. در نقطه ای که به سرعت مافوق صوت می رسد دیگر لزوماً اعمال نمی شود. بنابراین طراحی معمولی در اینجا متوقف می شود.
اگر بخواهیم همینطور ترک کنیم، متوجه میشویم که انرژی زیادی هنوز در گاز وجود دارد، زیرا وقتی موشک را ترک میکند، ستون تا حد زیادی در جهت شعاعی منبسط میشود. اکنون می توان انرژی اضافی را با استفاده از فشار گاز مافوق صوت برای شتاب بیشتر داس در جهت محوری مهار کرد.
حدس من این است که نیروی واکنشی از راه رفتن نازل استفاده می شود. تنها کاری که نازل باید انجام دهد این است که با سرعت کمتری نسبت به گاز به تنهایی منبسط شود. بنابراین یک لوله طولانی پس از حداکثر همگرایی تمام چیزی است که لازم است، که وقتی فشار گاز نزدیک به فشار اتمسفر است متوقف می شود.
-
rohamavation
نام: roham hesami radرهام حسامی راد
محل اقامت: 100 مایلی شمال لندن جاده آیلستون، لستر، لسترشر. LE2
عضویت : سهشنبه ۱۳۹۹/۸/۲۰ - ۰۸:۳۴
پست: 3278-
سپاس: 5494
- جنسیت:
تماس:
Re: هوافضا
من جواب همه سوالاتو میزارم
در تمام هواپیماها پس از کشیده شدن هوا به داخل موتور وارد کمپرسور (متراکم کننده) شده و حجم آن کاهش و فشارش افزایش مییابد.
هوا پس از خروج از کمپرسور وارد محفظه احتراق (Combustion Chamber) میشود، در اینجا هوای فشرده شده با سوخت مخلوط شده و احتراق صورت میگیرد.
پس از آن هوا وارد بخش توربین شده و پس از عبور از این بخش از نازل خروجی موتور خارج میشود.
بر اساس قانون سوم نیوتون (عمل و عکسالعمل) چون موتور به ذرات هوا نیرو وارد میکند پس ذرات هوا هم به موتور نیرو وارد کرده و به طبع هواپیما به جلو حرکت میکند.ه طور عمومی بیشتر موتورهای جت از نوع موتورهای احتراق درونی (internal combustion) هستند ولی انواع غیر درونی وجود دارد. در استفاده های عمومی لفظ "موتور جت" به یک توربین گازی که از داخل احتراق پیدا می کند اتلاق می شود، موتوری که با یک متراکم کننده گردشی که از یک توربین نیرو می گیرد کار می کند. این موتورها اولین ساختاری بودند که در موتورهای جت به کار رفتند.
موتورهای جت بر عكس موتورهای پیستونی كه در آنها نیروی محركه از طریق یک پیستون كه در یك سیلندر بالا و پایین می شود،تأمین می شود، با چرخش مداوم یك توربین و كمپرسور نیروی محركه را تأمین می كنند. در نتیجه بازده بالاتر و صدای كمتری نسبت به موتورهای پیستونی تولید می كنند. موتورهای جت از سه قسمت اصلی تشكیل شده اند كه عبارتند از كمپرسور، محفظه ی احتراق و توربین .توربین در قسمت انتهایی موتور قرار دارد و نیروی محركه كمپرسور را تأمین و از طریق یك یا چند میله(Shaft) به كمپرسور می رساند. معرفی انواع موتور نصب شده بر روی هواگرد ها و راندمان و سیکل کاری آنها و معرفی قطعات و قسمت های مختلف آن :
در کل موتور های نصب شده بر روی هواگرد ها به دو دسته تقسیم میشوند پیستونی و توربین گازی : موتور های پیستونی که در در پی احتراق درون سیلندر و حرکت پیستون و انتقال نیروی مکانیکی حاصل از حرکت پیستون به پره ها و ایجاد نیروی تراست این نوع موتور ها نسبت به توربین گازی پیچیدگی کمتر و قیمت ارزان تر دارند
موتور های توربین گازی نوع دیگری از موتور های نصب شده بر روی هواگرد ها میباشد که معروف ترین آنها موتور توربوجت است در موتور های توربوجت زمانی که سیال هوا از ورودی موتور وارد کمپرسور میشوند خود ورودی هوا به دو نوع مختلف تقسیم میشوند :همگرا و واگرا در کانال های همگرا مجرا اول بزرگ بوده و سپس کوچک میشود بر اساس قانون برنولی که فشار و سرعت رابطه عکس دارند در ورودی های همگرا سرعت افزایش و فشار کاهش می یابد عموما این نوع ورودی ها در هواپیما های فراصوت استفاده میشوند . نوع دیگر ورودی های هوا واگرا میباشد که بر عکس همگرا میباشد در این نوع ورودی ها مجرای اول کوچک بوده و در انتهای ورودی بزرگ است در این نوع ورودی ها سرعت سیال هوا کاهش یافته و فشار آن زیاد میشود این نوع ورودی هوا در هواپیما های مادون صوت استفاده میشود
بعد از وارد شدن سیال هوا به کمپرسور کار کمپرسور افزایش فشار هوا است گاهی اوقات هوا در کمپرسور فشارش ۴۰ برابر میشود تا برای اتاقک احتراق مناسب تر باشد بعد از کمپرسور سیال فشرده شده ی هوا وارد اتاقک احتراق میشود که در اینجا با سوخت مخلوط شده و احتراق صورت میگیرد و بعد از این فر آیند سیال هوا وارد توربین شده و توربین وظیفه اش این است که نیروی حرارتی سیال هوا را به نیروی مکانیکی تبدیل کرده و با استفاده از یک شفت این نیروی مکانیکی را به کمپرسور منتقل کرده و کمپرسور را بچرخاند بعد از اینکه سیال هوا از توربین عبور کرد به Jet pipe یا اصطلاحا اگزوز میرسد که این jet pipe در اصل یک کانال واگرا میباشد و در نهایت سیال هوا با خروج از اگزوز و عبور از خروجی و نازل و بر اساس قانون سوم نیوتن که هر عملی عکس عملی برابر آن و در خلاف جهت آن دارد باعث ایجاد نیروی تراست ورانش میشود
نوع دیگر موتور های توربوفن میباشند که هسته این موتور ها همان موتور توربوجت میباشد ولی دو by pass (کانال جریان) هوا ازکناره های موتور به آن اضافه شده که با استفاده از آن جریان هوا با جریان داغ خروجی مخلوط میشود موتور های توربوفن دارای یه فن در جلوی کمپرسور میباشند این نوع موتور ها دارای راندمان بیشتری نسبت به توربوجت میباشند
نوع دیگر موتور های توربو پراپ هستند این نوع موتور در اصل همان توربوفن است ولی به جای فن درون موتور دارای ملخ خارج از موتور میباشند در این نوع موتور ها ۹۰ در صد رانش توسط ملخ ها و ۱۰ درصد باقی توسط گاز های خروجی تامین میشود
نوع دیگر موتور های توربوشفت هستند که این موتور ها بر روی هلیکوپتر ها استفاده میشوند این نوع موتور ها تمامی نیروی مکانیکی تولید شده توسط توربین تماما توسط گیر بکس به شفت انتقال یافته تمام نیروی رانش توسط ملخ تامین میشود
نوع دیگر موتور ها رمجت میباشد موتور های رمجت فاقد کمپرسور و تور بین میباشند و از هیچ قطعه چرخانی بهره نمیبرند این موتور ها از حالت سکون قابل استفاده نیستند و معمولا به عنوان موتور دوم استفاده میشوند و در سرعت بالای دو ماخ کارایی بهتری نسبت به توربوجت دارند و ورودی هوای این موتور ها واگرا است برای اینکه سرعت سیال هوا کاهش یافته و فشارش افزایش یابد تا برای اتاقک احتراق مناسب باشد
اسکرم جت به نوع دیگری از موتور های رمجت میگوبند که دارای سرعت بیشتری نسبت به رمجت هستند این موتور در پهباد X-43 استفاده شده
پالس جت نوع دیگری از رمجت است که قابلیت استفاده در حالت سکون را داراست پالس جت در ورودی دارای یک شیر شاتل است که با یک فنر در حالت باز قرار دارد زمانی که احتراق صورت میگیرد فشار بالا رفته و دریچه شیر بسته میشود گاز سیال که چاره ای جز خارج شدن از خروجی ندارد خارج میشود و سپس فشار افت کرده و دوباره دریچه باز میشود و این فرآیند همین طور ادامه دارد در موشک کروز V1 از این موتور استفاده شده
نوع دیگر موتور توربورمجت است که در این نوع موتور در اصل یک توربوجت بوده که یک رمجت بر روی آن سوار است یعنی تا سرعت حدود ۲ ماخ بصورت توربوجت کار کردخ و از آن سرعت به بالا تغییر کاربری داده و به رمجت تبدیل میشود مثلا موتور J-58 متعلق به SR-71 تا سرعت ۲ ماخ بصورت توربوجت کار کرده و از آن به بعد به صورت رمجت کار میکند یعنی با شش لوله کنار گذر مستقیم سیال را به اتاقک احتراق میبرد
نوع دیگر موتور توربو راکتی است که این نوع در اصل چیزی بین موتور توربوجت و موتور راکتی است در این موتور در اتاقک احتراق اکسیدکننده و سوخت واکنش نشان د اده و بعد از عبور از توربین با هوای کمپرسور مخلوط شده و سوخت به آن اضافه میشود و احتراق دوم(پس سوز) صورت میگیرد این موتور برای سرعت های بسیار بالا استفاده میشود
پراپ فن: پراپ فن در اصل موتور توبین گازی است که از لحاظ رانش چیزی بین توربوپراپ و توربوفن است تعداد تیغه های فن زیاد و مقاطع تیغه ها و شکل ظاهری آنها طوری است که در دور های بالا میتوانند امواج صوتی حاصل از سرعت بالای فن و تیغه ها بدون آنکه افت راندمان و لرزشی داشته باشندتحمل نمایند فن پراپ ها دارای دولایه ملخ هستند که برای خنثی کردن گشتاور بر خلاف جهت یکدیگر میچرخند.
در حقیقت، تمام موتورهای جت که توربین دارند، نوع پیشرفته تری از همان موتورهای توریبن گازی هستند که در زمانهای دورتر استفاده می شده است. از موتورهای توربین گازی بیشتر برای تولید برق نه تولید نیروی رانش استفاده می شود. موتور توربوجت
موتور توربوجت یك توربین گازی است كه از قسمت هایی چون كمپرسور ؛ محفظه ی احتراق ؛ توربین و خروجی (nozzle) تشكیل شده است.
Turbo jet engine
هوا در ورودی موتور توسط كمپرسور فشرده شده و به محفظه ی احتراق وارد می شود. این هوای فشرده با سوخت جت مخلوط شده و توسط جرقه مشتعل می شود كه محصول این احتراق یا بهتر است بگوییم انفجار گازهای داغ و پر فشار است كه به توربین خورده و آن را می چرخاند. این گاز ها از طریق خروجی یا اگزوز تخلیه می شوند.
Turbo jet schematic
موتور جت انرژی پتانسیل موجود در سوخت را به انرژی جنبشی در اگزوز تبدیل می كند كه از این رو نیروی تراست به وجود می آید. تمام هوای ورودی به موتور و برخلاف نوع توربوفن ؛ از داخل كمپرسور، محفظه ی احتراق، توربین و اگزوز عبور می كند.
موتور توربوفن
موتور توربوفن نیز یك توربین گازی است كه شباهت بسیار زیادی به موتور توربوجت دارد. به مانند توربوجت از سه بخش اصلی كمپرسور ؛ محفظه ی احتراق و توربین گازی تشكیل شده است. تنها تفاوت این دو نوع موتور جت (توربوفن ؛ توربوجت) در این است كه در موتور توربوفن یك فن اضافی هم وجود دارد كه مانند كمپرسور توسط قسمت توربینی موتور چرخانده می شود
Turbofan shcematic
مقداری از هوای تولیدی (شتاب داده شده) از كنار هسته ی موتور عبور كرده و به داخل موتور نشده و از اگزوز خارج می شود. این هوای بایپس (Bypass) شده كه از كنار هسته ی موتور عبور می كند سرعت بسیار كمتری نسبت به هوای تولیدی در مركز موتور دارد با این تفاوت كه مقدار آن بسیار زیاد تر است.
Turbofan Bypass and jet exhasust
از این رو تولید نیرو در این موتورها در دورها و سرعت های پایین و كمتر از سرعت صوت (Subsonic) بسیار بهتر از موتورهای توربوجت انجام می پذیرد و هواپیماهای مسافربری غالبا از این نوع موتور استفاده می كنند. اما به دلیل ورودی هوای بسیار بزگتر نسبت به موتورهای توربوجت درگ (Drag) بیشتری تولید می كنند.
Turbofan Engine
دو نوع موتور توربوفن به طور عمده وجود دارد :
موتور توربوفن (Low Bypass)
موتور توربوفن (High Bypass)
در موتورهای لوبایپس مقدار بایپس تقریبا دو برابر است. این بدین معنی است كه برای مثال اگر مقدار یك كیلوگرم هوا وارد هسته ی موتور شود ؛ مقدار دو كیلوگرم هوا از كنار موتور بایپس شده و از اگزوز خارج می شود. موتورهای لوبایپس معمولا از یك خروجی (nozzle) اگزوز استفاده می كنند. به این معنی كه هم هوای تولیدی هسته ی موتور و هم هوای تولیدی بایپس شده از یك خروجی خارج می شوند.
Turbofan
High Bypass Turbofan
موتورهای بایپس بالا معمولا مقدار بیشتری از هوا را بایپس می كنند و این مقدار تا 6 برابر هوای ورودی به مركز موتور افزایش می یابد. این نوع توربوفن ها معمولا مقدار بسیار زیادتری از نیروی تراست (thrust) را نسبت به لوبایپس ها ایجاد می كنند و این موضوع به خاطر حجم بسیار زیادتر هوایی است كه فن به آن شتاب می دهد. این موتورها همچنین بسیار كارامد تر از موتورهای لوبایپس (Low Bypass) هستند.
توربوپراپ و توربوشفت (Turboprop and turboshaft)
موتورهای توربوپراپ نیز از مشتقات موتورهای جت هستند و از اساس كار مشابهی پيروی مي كنند (توربين گازی) و نيروی گاز را به گردش شفت تبديل می كنند و بعد از اين مرحله توسط ملخ (Propller)نیروی چرخشی را به نيروی تراست تبديل مي كنند.
Turboprop
در حالی كه اين موتورها كاملا موتور جت نيستند و براي توليد تراست از مكانيزم كمكي استفاده می كنند ؛ موتورهای توربوپرآپ بسيار به موتورهای توربينی جت شبيهند و معمولا به نوعی موتور جت تشبيه می شوند.
در موتورهای توربوپراپ توليد تراست ؛ به جای اينكه به طور خاص وابسته به توليد گازهای پرفشار و پرسرعت باشد بيشتر توسط چرخش ملخ (Propeller) صورت مي پذيرد. به خاطر كم بودن تراست جت نسبت به ملخ ؛ موتورهای توربوپراپ گاها به نام موتورهای جت هيبريدی ناميده می شوند. اين موتورها از تمام جهات شبيه موتورهای توربوفن می باشند.
Pratt & Whitney turboprop engine
هم فن و هم ملخ توسط مكانيزم مشابهی توليد توان می كنند تنها تفاوت موجود بین آنها اين است كه، اكثر توربوپراپ ها از چرخ دنده برای كم كردن دور ملخ استفاده می كنند.
با وجود اینکه توربوپراپ ها ، اكثر تراست تولیدی خوب را توسط چرخش ملخ توليد می كنند با این حال ؛ حجم گازهای خروجی از اگزوز در طراحی بسیار مهم و هائز اهمیت می باشد. حداكثر تراست وقتی بدست مي آيد كه مقدار تراست توليدی توسط ملخ و گازهای داغ با هم همخوانی داشته باشند.
Turboprop schematic
توربوپراپ ها در سرعت های پايين كه ملخ دارای بازده بالايی است از موتورهای توربوفن و توربوجت بازدهی به مراتب بهتری دارند. ولی در سرعت های بالاتر به طرز چشمگيری پرسرو صداتر و كم بازده تر می شوند. در صورت گردش پروانه با سرعت بسیار بالا ؛ ممکن است لبه های ملخ سرعتی بالاتر از سرعت صوت پیدا کند که باعث به وجود آمدن صدای بسیار زیاد می شود.
توربوپراپ ها بسيار به توربوفن ها شبيه هستند با اين تفاوت كه تقريبا تمام نيروی توليدی از توربين گازی به چرخش شفت تبديل می شود. اين قابليت باعث شده كه از اين نوع موتورها در چرخاندن تجهیزات دیگر نیز به طرز گسترده ای استفاده شود. عدم توليد يا توليد بسيار كم گازهای پرسرعت توسط اين نوع موتورها ؛ باعث شده كه در هلیكوپترها نیز مورد استفاده قرار گيرند.
فن تر اپ فن (Propfan)
یک موتور پراپ فن (Propfan or Unducted fan or open rotor or Ultra-high bypass) نوعی موتور جت است که از ژنراتور گازی برای نیرو بخشی به فن مربوطه استفاده می کند و بسیار شبیه موتور توربوپرآپ است. مانند توربوپرآپ ؛ پراپ فن اکسر نیروی تولیدی خود را از چرخاندن ملخ بدست می آورد نه گازهای پرسرعت.
تنها تفاوت پراپ فن با توربوپراپ در این است که پره ها تا جای ممکن به سمت عقب کشیده شده تا اجازه ی کار در سرعت های نزدیک صوت و تا 0.8 برابر آن را بدهد که در این حال قابلیت رقابت با جت های تجاری مدرن و مجهز به موتور توربوفن را پیدا می کند. این نوع موتورها به اندازه ی توربوپراپ ها در مصرف سوخت به صرفه هستند و در این حال قابلیت و پرفرمنس موتورهای توربوفن تجاری را نیز دارا هستند. در حالی که تحقیقات گسترده (شامل تست پروازی) برای تست پراپ فن ها انجام شده ؛ هنوز هیچ موتوری با این ساختار وارد تولید انبوه نگردیده است.
موتورهای (Ram Powered)
موتورهای جت رم پاور نوعی از موتورهایی هستند که مانند توربین های گازی از تنفس هوا استفاده کرده و از چرخه ی برایتون (Brayton Cycle) پیروی می کنند. تفاوت موتورهای رم پاور و توربین های گازی در روش کمپرس کردن هوای ورودی می باشد. درحالی که توربین های گازی از کمپرسورهای افقی و یا سانتریفیوژی (centrifugal) برای کمپرس هوا استفاده می کنند ؛ موتورهای رم (Ram) فقط هوا را در وردی خود کمپرس می کنند. موتورهای رم به خاطر عدم وجود هیچ قطعه ی متحرک در ساختار موتور جزء ساده ترین نوع موتور جت به حساب می آیند.
موتورهای رم جت (Ramjet)
موتورهای رم جت ساده ترین نوع موتورهای جت هستند و از سه بخش اصلی شامل :
ورودی. برای کمپرس کردن هوا
سوزاننده. برای تزریق سوخت و سوزاندن آن
خروجی (Nozzle). برای خارج کردن گازهای داغ و پرسرعت حاصله از احتراق سوخت.
موتورهای رم جت برای کمپرس کردن هوای ورودی و بازدهی بالاتر، نیاز به سرعت تقریبا بالایی دارند. پس رم جت ها نمی توانند در هنگام ایستادن هواپیما کار کنند ؛ در حالی که این نوع موتورها در سرعت های مافوق صوت (Supersonic) بیشترین بازدهی را دارا هستند. شاخصه ی این نوع موتورها این است که سوختن گاز درون آنها در سرعت های پایین تر از صوت انجام می پذیرم. جریان پرسرعت هوا ( Supersonic) از طریق ورودی وارد موتور شده و این سرعت به طرز زیادی گرفته می شود و بعد از این مرحله احتراق در سرعت مادون صوت انجام می پذیرد. درست است که هر چه سرعت هوای ورودی بیشتر باشد ؛ انرژی بیشتری در ورودی هوا تلف می شود ؛ اما موتورهای رم جت قابلیت دسترسی به سرعت هایی تا پنج برابر سرعت صوت را دارا هستند.
اسکرم جت (Scramjets)
موتورهای اسکرم جت بسیار شبیه رم جت هستند و هیچ گونه قطعه ی متحرکی ندارند و از بخش های ورودی ؛ اتاق احتراق و خروجی تشکیل شده اند. تفاوت اصلی این دو نوع موتور (Ramjet & Scramjet) در این است که در موتور اسکرم جت سرعت هوای ورودی به پایین تر از سرعت صوت تقلیل پیدا نمی کند و از احتراق مافوق صوت استفاده می کنند. نام اسکرم جت از سه کلمه ی موتور احتراق مافوق صوت رم جت (Supersonic Combusting Ramjet) بر گرفته شده است. به خاطر اینکه موتورهای اسکرم جت از جریان مافوق صوت هوا برای انفجار و سوزاندن سوخت استفاده می کنند ؛ قابلیت رسیده به سرعت های بالای 6 برابر سرعت صوت ؛ جایی که موتورهای رم جت قدیمی بسیار کم بازده هستند ؛ را دارا هستند. تفاوت دیگر این دو موتور در روش کمپرس کردن هوا در هر دو است. در حالی که اکثر هوای کمپرس شده در رم جت توسط ورودی کمپرس می شوند ؛ در اسکرم جت(Scramjet) از شاک ویوهای(Shock wave) به وجود آمده به خاطر سرعت مافوق صوت برای احتراق مافوق صوت استفاده می شود (oblique shocks). تعداد بسیار کمی از این نوع موتور تا به حال ساخته و مورد آزمایش قرار گرفته است.
در تمام هواپیماها پس از کشیده شدن هوا به داخل موتور وارد کمپرسور (متراکم کننده) شده و حجم آن کاهش و فشارش افزایش مییابد.
هوا پس از خروج از کمپرسور وارد محفظه احتراق (Combustion Chamber) میشود، در اینجا هوای فشرده شده با سوخت مخلوط شده و احتراق صورت میگیرد.
پس از آن هوا وارد بخش توربین شده و پس از عبور از این بخش از نازل خروجی موتور خارج میشود.
بر اساس قانون سوم نیوتون (عمل و عکسالعمل) چون موتور به ذرات هوا نیرو وارد میکند پس ذرات هوا هم به موتور نیرو وارد کرده و به طبع هواپیما به جلو حرکت میکند.ه طور عمومی بیشتر موتورهای جت از نوع موتورهای احتراق درونی (internal combustion) هستند ولی انواع غیر درونی وجود دارد. در استفاده های عمومی لفظ "موتور جت" به یک توربین گازی که از داخل احتراق پیدا می کند اتلاق می شود، موتوری که با یک متراکم کننده گردشی که از یک توربین نیرو می گیرد کار می کند. این موتورها اولین ساختاری بودند که در موتورهای جت به کار رفتند.
موتورهای جت بر عكس موتورهای پیستونی كه در آنها نیروی محركه از طریق یک پیستون كه در یك سیلندر بالا و پایین می شود،تأمین می شود، با چرخش مداوم یك توربین و كمپرسور نیروی محركه را تأمین می كنند. در نتیجه بازده بالاتر و صدای كمتری نسبت به موتورهای پیستونی تولید می كنند. موتورهای جت از سه قسمت اصلی تشكیل شده اند كه عبارتند از كمپرسور، محفظه ی احتراق و توربین .توربین در قسمت انتهایی موتور قرار دارد و نیروی محركه كمپرسور را تأمین و از طریق یك یا چند میله(Shaft) به كمپرسور می رساند. معرفی انواع موتور نصب شده بر روی هواگرد ها و راندمان و سیکل کاری آنها و معرفی قطعات و قسمت های مختلف آن :
در کل موتور های نصب شده بر روی هواگرد ها به دو دسته تقسیم میشوند پیستونی و توربین گازی : موتور های پیستونی که در در پی احتراق درون سیلندر و حرکت پیستون و انتقال نیروی مکانیکی حاصل از حرکت پیستون به پره ها و ایجاد نیروی تراست این نوع موتور ها نسبت به توربین گازی پیچیدگی کمتر و قیمت ارزان تر دارند
موتور های توربین گازی نوع دیگری از موتور های نصب شده بر روی هواگرد ها میباشد که معروف ترین آنها موتور توربوجت است در موتور های توربوجت زمانی که سیال هوا از ورودی موتور وارد کمپرسور میشوند خود ورودی هوا به دو نوع مختلف تقسیم میشوند :همگرا و واگرا در کانال های همگرا مجرا اول بزرگ بوده و سپس کوچک میشود بر اساس قانون برنولی که فشار و سرعت رابطه عکس دارند در ورودی های همگرا سرعت افزایش و فشار کاهش می یابد عموما این نوع ورودی ها در هواپیما های فراصوت استفاده میشوند . نوع دیگر ورودی های هوا واگرا میباشد که بر عکس همگرا میباشد در این نوع ورودی ها مجرای اول کوچک بوده و در انتهای ورودی بزرگ است در این نوع ورودی ها سرعت سیال هوا کاهش یافته و فشار آن زیاد میشود این نوع ورودی هوا در هواپیما های مادون صوت استفاده میشود
بعد از وارد شدن سیال هوا به کمپرسور کار کمپرسور افزایش فشار هوا است گاهی اوقات هوا در کمپرسور فشارش ۴۰ برابر میشود تا برای اتاقک احتراق مناسب تر باشد بعد از کمپرسور سیال فشرده شده ی هوا وارد اتاقک احتراق میشود که در اینجا با سوخت مخلوط شده و احتراق صورت میگیرد و بعد از این فر آیند سیال هوا وارد توربین شده و توربین وظیفه اش این است که نیروی حرارتی سیال هوا را به نیروی مکانیکی تبدیل کرده و با استفاده از یک شفت این نیروی مکانیکی را به کمپرسور منتقل کرده و کمپرسور را بچرخاند بعد از اینکه سیال هوا از توربین عبور کرد به Jet pipe یا اصطلاحا اگزوز میرسد که این jet pipe در اصل یک کانال واگرا میباشد و در نهایت سیال هوا با خروج از اگزوز و عبور از خروجی و نازل و بر اساس قانون سوم نیوتن که هر عملی عکس عملی برابر آن و در خلاف جهت آن دارد باعث ایجاد نیروی تراست ورانش میشود
نوع دیگر موتور های توربوفن میباشند که هسته این موتور ها همان موتور توربوجت میباشد ولی دو by pass (کانال جریان) هوا ازکناره های موتور به آن اضافه شده که با استفاده از آن جریان هوا با جریان داغ خروجی مخلوط میشود موتور های توربوفن دارای یه فن در جلوی کمپرسور میباشند این نوع موتور ها دارای راندمان بیشتری نسبت به توربوجت میباشند
نوع دیگر موتور های توربو پراپ هستند این نوع موتور در اصل همان توربوفن است ولی به جای فن درون موتور دارای ملخ خارج از موتور میباشند در این نوع موتور ها ۹۰ در صد رانش توسط ملخ ها و ۱۰ درصد باقی توسط گاز های خروجی تامین میشود
نوع دیگر موتور های توربوشفت هستند که این موتور ها بر روی هلیکوپتر ها استفاده میشوند این نوع موتور ها تمامی نیروی مکانیکی تولید شده توسط توربین تماما توسط گیر بکس به شفت انتقال یافته تمام نیروی رانش توسط ملخ تامین میشود
نوع دیگر موتور ها رمجت میباشد موتور های رمجت فاقد کمپرسور و تور بین میباشند و از هیچ قطعه چرخانی بهره نمیبرند این موتور ها از حالت سکون قابل استفاده نیستند و معمولا به عنوان موتور دوم استفاده میشوند و در سرعت بالای دو ماخ کارایی بهتری نسبت به توربوجت دارند و ورودی هوای این موتور ها واگرا است برای اینکه سرعت سیال هوا کاهش یافته و فشارش افزایش یابد تا برای اتاقک احتراق مناسب باشد
اسکرم جت به نوع دیگری از موتور های رمجت میگوبند که دارای سرعت بیشتری نسبت به رمجت هستند این موتور در پهباد X-43 استفاده شده
پالس جت نوع دیگری از رمجت است که قابلیت استفاده در حالت سکون را داراست پالس جت در ورودی دارای یک شیر شاتل است که با یک فنر در حالت باز قرار دارد زمانی که احتراق صورت میگیرد فشار بالا رفته و دریچه شیر بسته میشود گاز سیال که چاره ای جز خارج شدن از خروجی ندارد خارج میشود و سپس فشار افت کرده و دوباره دریچه باز میشود و این فرآیند همین طور ادامه دارد در موشک کروز V1 از این موتور استفاده شده
نوع دیگر موتور توربورمجت است که در این نوع موتور در اصل یک توربوجت بوده که یک رمجت بر روی آن سوار است یعنی تا سرعت حدود ۲ ماخ بصورت توربوجت کار کردخ و از آن سرعت به بالا تغییر کاربری داده و به رمجت تبدیل میشود مثلا موتور J-58 متعلق به SR-71 تا سرعت ۲ ماخ بصورت توربوجت کار کرده و از آن به بعد به صورت رمجت کار میکند یعنی با شش لوله کنار گذر مستقیم سیال را به اتاقک احتراق میبرد
نوع دیگر موتور توربو راکتی است که این نوع در اصل چیزی بین موتور توربوجت و موتور راکتی است در این موتور در اتاقک احتراق اکسیدکننده و سوخت واکنش نشان د اده و بعد از عبور از توربین با هوای کمپرسور مخلوط شده و سوخت به آن اضافه میشود و احتراق دوم(پس سوز) صورت میگیرد این موتور برای سرعت های بسیار بالا استفاده میشود
پراپ فن: پراپ فن در اصل موتور توبین گازی است که از لحاظ رانش چیزی بین توربوپراپ و توربوفن است تعداد تیغه های فن زیاد و مقاطع تیغه ها و شکل ظاهری آنها طوری است که در دور های بالا میتوانند امواج صوتی حاصل از سرعت بالای فن و تیغه ها بدون آنکه افت راندمان و لرزشی داشته باشندتحمل نمایند فن پراپ ها دارای دولایه ملخ هستند که برای خنثی کردن گشتاور بر خلاف جهت یکدیگر میچرخند.
در حقیقت، تمام موتورهای جت که توربین دارند، نوع پیشرفته تری از همان موتورهای توریبن گازی هستند که در زمانهای دورتر استفاده می شده است. از موتورهای توربین گازی بیشتر برای تولید برق نه تولید نیروی رانش استفاده می شود. موتور توربوجت
موتور توربوجت یك توربین گازی است كه از قسمت هایی چون كمپرسور ؛ محفظه ی احتراق ؛ توربین و خروجی (nozzle) تشكیل شده است.
Turbo jet engine
هوا در ورودی موتور توسط كمپرسور فشرده شده و به محفظه ی احتراق وارد می شود. این هوای فشرده با سوخت جت مخلوط شده و توسط جرقه مشتعل می شود كه محصول این احتراق یا بهتر است بگوییم انفجار گازهای داغ و پر فشار است كه به توربین خورده و آن را می چرخاند. این گاز ها از طریق خروجی یا اگزوز تخلیه می شوند.
Turbo jet schematic
موتور جت انرژی پتانسیل موجود در سوخت را به انرژی جنبشی در اگزوز تبدیل می كند كه از این رو نیروی تراست به وجود می آید. تمام هوای ورودی به موتور و برخلاف نوع توربوفن ؛ از داخل كمپرسور، محفظه ی احتراق، توربین و اگزوز عبور می كند.
موتور توربوفن
موتور توربوفن نیز یك توربین گازی است كه شباهت بسیار زیادی به موتور توربوجت دارد. به مانند توربوجت از سه بخش اصلی كمپرسور ؛ محفظه ی احتراق و توربین گازی تشكیل شده است. تنها تفاوت این دو نوع موتور جت (توربوفن ؛ توربوجت) در این است كه در موتور توربوفن یك فن اضافی هم وجود دارد كه مانند كمپرسور توسط قسمت توربینی موتور چرخانده می شود
Turbofan shcematic
مقداری از هوای تولیدی (شتاب داده شده) از كنار هسته ی موتور عبور كرده و به داخل موتور نشده و از اگزوز خارج می شود. این هوای بایپس (Bypass) شده كه از كنار هسته ی موتور عبور می كند سرعت بسیار كمتری نسبت به هوای تولیدی در مركز موتور دارد با این تفاوت كه مقدار آن بسیار زیاد تر است.
Turbofan Bypass and jet exhasust
از این رو تولید نیرو در این موتورها در دورها و سرعت های پایین و كمتر از سرعت صوت (Subsonic) بسیار بهتر از موتورهای توربوجت انجام می پذیرد و هواپیماهای مسافربری غالبا از این نوع موتور استفاده می كنند. اما به دلیل ورودی هوای بسیار بزگتر نسبت به موتورهای توربوجت درگ (Drag) بیشتری تولید می كنند.
Turbofan Engine
دو نوع موتور توربوفن به طور عمده وجود دارد :
موتور توربوفن (Low Bypass)
موتور توربوفن (High Bypass)
در موتورهای لوبایپس مقدار بایپس تقریبا دو برابر است. این بدین معنی است كه برای مثال اگر مقدار یك كیلوگرم هوا وارد هسته ی موتور شود ؛ مقدار دو كیلوگرم هوا از كنار موتور بایپس شده و از اگزوز خارج می شود. موتورهای لوبایپس معمولا از یك خروجی (nozzle) اگزوز استفاده می كنند. به این معنی كه هم هوای تولیدی هسته ی موتور و هم هوای تولیدی بایپس شده از یك خروجی خارج می شوند.
Turbofan
High Bypass Turbofan
موتورهای بایپس بالا معمولا مقدار بیشتری از هوا را بایپس می كنند و این مقدار تا 6 برابر هوای ورودی به مركز موتور افزایش می یابد. این نوع توربوفن ها معمولا مقدار بسیار زیادتری از نیروی تراست (thrust) را نسبت به لوبایپس ها ایجاد می كنند و این موضوع به خاطر حجم بسیار زیادتر هوایی است كه فن به آن شتاب می دهد. این موتورها همچنین بسیار كارامد تر از موتورهای لوبایپس (Low Bypass) هستند.
توربوپراپ و توربوشفت (Turboprop and turboshaft)
موتورهای توربوپراپ نیز از مشتقات موتورهای جت هستند و از اساس كار مشابهی پيروی مي كنند (توربين گازی) و نيروی گاز را به گردش شفت تبديل می كنند و بعد از اين مرحله توسط ملخ (Propller)نیروی چرخشی را به نيروی تراست تبديل مي كنند.
Turboprop
در حالی كه اين موتورها كاملا موتور جت نيستند و براي توليد تراست از مكانيزم كمكي استفاده می كنند ؛ موتورهای توربوپرآپ بسيار به موتورهای توربينی جت شبيهند و معمولا به نوعی موتور جت تشبيه می شوند.
در موتورهای توربوپراپ توليد تراست ؛ به جای اينكه به طور خاص وابسته به توليد گازهای پرفشار و پرسرعت باشد بيشتر توسط چرخش ملخ (Propeller) صورت مي پذيرد. به خاطر كم بودن تراست جت نسبت به ملخ ؛ موتورهای توربوپراپ گاها به نام موتورهای جت هيبريدی ناميده می شوند. اين موتورها از تمام جهات شبيه موتورهای توربوفن می باشند.
Pratt & Whitney turboprop engine
هم فن و هم ملخ توسط مكانيزم مشابهی توليد توان می كنند تنها تفاوت موجود بین آنها اين است كه، اكثر توربوپراپ ها از چرخ دنده برای كم كردن دور ملخ استفاده می كنند.
با وجود اینکه توربوپراپ ها ، اكثر تراست تولیدی خوب را توسط چرخش ملخ توليد می كنند با این حال ؛ حجم گازهای خروجی از اگزوز در طراحی بسیار مهم و هائز اهمیت می باشد. حداكثر تراست وقتی بدست مي آيد كه مقدار تراست توليدی توسط ملخ و گازهای داغ با هم همخوانی داشته باشند.
Turboprop schematic
توربوپراپ ها در سرعت های پايين كه ملخ دارای بازده بالايی است از موتورهای توربوفن و توربوجت بازدهی به مراتب بهتری دارند. ولی در سرعت های بالاتر به طرز چشمگيری پرسرو صداتر و كم بازده تر می شوند. در صورت گردش پروانه با سرعت بسیار بالا ؛ ممکن است لبه های ملخ سرعتی بالاتر از سرعت صوت پیدا کند که باعث به وجود آمدن صدای بسیار زیاد می شود.
توربوپراپ ها بسيار به توربوفن ها شبيه هستند با اين تفاوت كه تقريبا تمام نيروی توليدی از توربين گازی به چرخش شفت تبديل می شود. اين قابليت باعث شده كه از اين نوع موتورها در چرخاندن تجهیزات دیگر نیز به طرز گسترده ای استفاده شود. عدم توليد يا توليد بسيار كم گازهای پرسرعت توسط اين نوع موتورها ؛ باعث شده كه در هلیكوپترها نیز مورد استفاده قرار گيرند.
فن تر اپ فن (Propfan)
یک موتور پراپ فن (Propfan or Unducted fan or open rotor or Ultra-high bypass) نوعی موتور جت است که از ژنراتور گازی برای نیرو بخشی به فن مربوطه استفاده می کند و بسیار شبیه موتور توربوپرآپ است. مانند توربوپرآپ ؛ پراپ فن اکسر نیروی تولیدی خود را از چرخاندن ملخ بدست می آورد نه گازهای پرسرعت.
تنها تفاوت پراپ فن با توربوپراپ در این است که پره ها تا جای ممکن به سمت عقب کشیده شده تا اجازه ی کار در سرعت های نزدیک صوت و تا 0.8 برابر آن را بدهد که در این حال قابلیت رقابت با جت های تجاری مدرن و مجهز به موتور توربوفن را پیدا می کند. این نوع موتورها به اندازه ی توربوپراپ ها در مصرف سوخت به صرفه هستند و در این حال قابلیت و پرفرمنس موتورهای توربوفن تجاری را نیز دارا هستند. در حالی که تحقیقات گسترده (شامل تست پروازی) برای تست پراپ فن ها انجام شده ؛ هنوز هیچ موتوری با این ساختار وارد تولید انبوه نگردیده است.
موتورهای (Ram Powered)
موتورهای جت رم پاور نوعی از موتورهایی هستند که مانند توربین های گازی از تنفس هوا استفاده کرده و از چرخه ی برایتون (Brayton Cycle) پیروی می کنند. تفاوت موتورهای رم پاور و توربین های گازی در روش کمپرس کردن هوای ورودی می باشد. درحالی که توربین های گازی از کمپرسورهای افقی و یا سانتریفیوژی (centrifugal) برای کمپرس هوا استفاده می کنند ؛ موتورهای رم (Ram) فقط هوا را در وردی خود کمپرس می کنند. موتورهای رم به خاطر عدم وجود هیچ قطعه ی متحرک در ساختار موتور جزء ساده ترین نوع موتور جت به حساب می آیند.
موتورهای رم جت (Ramjet)
موتورهای رم جت ساده ترین نوع موتورهای جت هستند و از سه بخش اصلی شامل :
ورودی. برای کمپرس کردن هوا
سوزاننده. برای تزریق سوخت و سوزاندن آن
خروجی (Nozzle). برای خارج کردن گازهای داغ و پرسرعت حاصله از احتراق سوخت.
موتورهای رم جت برای کمپرس کردن هوای ورودی و بازدهی بالاتر، نیاز به سرعت تقریبا بالایی دارند. پس رم جت ها نمی توانند در هنگام ایستادن هواپیما کار کنند ؛ در حالی که این نوع موتورها در سرعت های مافوق صوت (Supersonic) بیشترین بازدهی را دارا هستند. شاخصه ی این نوع موتورها این است که سوختن گاز درون آنها در سرعت های پایین تر از صوت انجام می پذیرم. جریان پرسرعت هوا ( Supersonic) از طریق ورودی وارد موتور شده و این سرعت به طرز زیادی گرفته می شود و بعد از این مرحله احتراق در سرعت مادون صوت انجام می پذیرد. درست است که هر چه سرعت هوای ورودی بیشتر باشد ؛ انرژی بیشتری در ورودی هوا تلف می شود ؛ اما موتورهای رم جت قابلیت دسترسی به سرعت هایی تا پنج برابر سرعت صوت را دارا هستند.
اسکرم جت (Scramjets)
موتورهای اسکرم جت بسیار شبیه رم جت هستند و هیچ گونه قطعه ی متحرکی ندارند و از بخش های ورودی ؛ اتاق احتراق و خروجی تشکیل شده اند. تفاوت اصلی این دو نوع موتور (Ramjet & Scramjet) در این است که در موتور اسکرم جت سرعت هوای ورودی به پایین تر از سرعت صوت تقلیل پیدا نمی کند و از احتراق مافوق صوت استفاده می کنند. نام اسکرم جت از سه کلمه ی موتور احتراق مافوق صوت رم جت (Supersonic Combusting Ramjet) بر گرفته شده است. به خاطر اینکه موتورهای اسکرم جت از جریان مافوق صوت هوا برای انفجار و سوزاندن سوخت استفاده می کنند ؛ قابلیت رسیده به سرعت های بالای 6 برابر سرعت صوت ؛ جایی که موتورهای رم جت قدیمی بسیار کم بازده هستند ؛ را دارا هستند. تفاوت دیگر این دو موتور در روش کمپرس کردن هوا در هر دو است. در حالی که اکثر هوای کمپرس شده در رم جت توسط ورودی کمپرس می شوند ؛ در اسکرم جت(Scramjet) از شاک ویوهای(Shock wave) به وجود آمده به خاطر سرعت مافوق صوت برای احتراق مافوق صوت استفاده می شود (oblique shocks). تعداد بسیار کمی از این نوع موتور تا به حال ساخته و مورد آزمایش قرار گرفته است.
-
rohamavation
نام: roham hesami radرهام حسامی راد
محل اقامت: 100 مایلی شمال لندن جاده آیلستون، لستر، لسترشر. LE2
عضویت : سهشنبه ۱۳۹۹/۸/۲۰ - ۰۸:۳۴
پست: 3278-
سپاس: 5494
- جنسیت:
تماس:
Re: هوافضا
مکانیک نیوتنی می گوید ما در جهانی با سه بعد فضایی و زمان جهانی که متغیر مستقل است زندگی می کنیم که در آن می توانیم ترجمه و چرخش را توصیف کنیم. نظریه نسبیت می گوید ما در جهانی با سه بعد فضا مانند و یک بعد زمان مانند زندگی می کنیم که در هم تنیده شده اند. این پاسخ جنبه های نسبیتی را نادیده می گیرد.
با این فرض، توصیف انتقال حداقل در مقایسه با چرخش، آسان است. مرکز جرم یک جسم دارای موقعیتی در چارچوب مرجع (ترجیحاً اینرسی) است که در طول زمان تغییر می کند. گرانش، کشش و سایر فعل و انفعالات مانند شلیک پیشرانه های انتقالی این مقدار را به عنوان تابعی از زمان تغییر می دهد. این تعاملات را شبیه سازی کنید و سه درجه آزادی (3DOF) شبیه سازی خواهید داشت.مکانیک را می توان به سه شاخه تقسیم کرد: استاتیک، که با نیروهای وارد بر جسم در حال سکون و درون آن سروکار دارد. سینماتیک، که حرکات احتمالی یک جسم یا سیستم اجسام را توصیف می کند. و سینتیک، که تلاش می کند حرکتی را که در یک موقعیت خاص رخ می دهد، توضیح دهد یا پیش بینی کند. روش دیگر، مکانیک ممکن است بر اساس نوع سیستم مورد مطالعه تقسیم شود. ساده ترین سیستم مکانیکی ذره است که به عنوان جسمی به قدری کوچک تعریف می شود که شکل و ساختار درونی آن هیچ نتیجه ای در مسئله داده شده ندارد. پیچیده تر، حرکت سیستمی متشکل از دو یا چند ذره است که بر یکدیگر نیرو وارد می کنند و احتمالاً تحت نیروهای اعمال شده توسط اجسام خارج از سیستم قرار می گیرند.حال پرتابه ای در نظر بگیرید
سرعت پرتاب رو همچنان بالا میبریم. سهمی ما تبدیل به یه مارپیچ (اسپیرال) یا فنر میشه و زمین رو دور میزنه.
با افزایش سرعت اوّلیهی پرتاب، از یه جایی به بعد دیگه سنگ به سطح زمین برخورد نمیکنه بلکه این مارپیچ ما تبدیل به یه بیضی میشه؛ سنگ از نزدیکی سطح زمین رد میشه و دوباره بر میگرده به نقطهای که ازش پرتاب شده و چون توی این مسیر اصطحکاکی وجود نداره (مشروط به این هیچ قسمتی از مسیر با اتمسفر زمین تلاقی نداشته باشه)، سنگ ما برای همیشه توی این مسیر باقی میمونه و رسماً یه قمر از زمین به حساب میاد. دورترین فاصلهی سنگ از زمین (اوج) میشه همون نقطهی پرتابش و نزدیکترین نقطه (حضیض) هم میشه نقطهی مقابلش. مسیر ماه دور زمین و مسیر تمام سیّارات دور خوشید هم چنین شکلی داره. پدیدهی اَبَرماه (supermoon) هم دقیقاً زمانی اتّفاق میفته که ماه توی نقطهی حضیض مدار خودش دور زمین باشه.
با افزایش سرعت اوّلیه توی لحظهی پرتاب، ارتفاع نقطهی حضیض از سطح زمین هم بیشتر و بیشتر میشه (طبیعتاً چون با افزایش حداقل سرعت، حداکثر سرعت هم افزایش پیدا میکنه؛ البته نه به صورت خطّی) و توی یک لحظه، هم سرعت لحظهی پرتاب با سرعت حضیض برابر میشه و هم ارتفاع حضیض با اوج برابر میشه. توی این حالت مدار ما دقیقاً فرم یه دایره رو پیدا میکنه. اکثر ماهوارههایی که دور زمین داریم هم مدار دایره شکلی دارن. هرچقدر ارتفاع سنگ/ماهواره از سطح زمین بیشتر باشه، سرعت اوّلیهای که نیاز هست تا مداری دایرهای شکل تشکیل بشه کمتر خواهد بود.
معمولاً مدار ماهوارههای اطراف زمین رو به سه دسته تقسیم میکنیم؛ چرا که کاربرد و عملکرد ماهوارههایی که توی این سه دسته قرار میگیرن با با بقیهی دستهها تفاوت عمده دارن. مدار پایینی زمین (Low Earth Orbit) شلوغترین مدار هست و غیر از ماهوارههای بسیاری که اونجا مستقر شدن، اکثر سفرهای فضایی سرنشیندار هم به همین مدار صورت میگیره. برای مثال، مدار ایستگاه فضایی بینالمللی (ISS) توی ارتفاع حدود 400 کیلومتری واقع شده و ISS برای موندن توی این مدار از سرعت خطّی حدود 27600 کیلومتر در ساعت برخوردار هست و هر 92 دقیقه یک دور زمین رو دور میزنه. مدار بالاتر از اون، مدار میانی زمین (Medium Earth Orbit) هست که بیشتر ماهوارههای ارتباطی و ناوبری (از جمله مجموعه ماهوارههای GPS) اونجا قرار دارن. و امّا گفتیم که هرچقدر فاصله از سطح زمین بیشتر بشه، سرعت مورد نیاز برای موندن توی مدار کمتر میشه. توی ارتفاع 35876 کیلومتری، سرعت مورد نیاز برای موندن توی مدار دایرهای شکل دور زمین به اندازهای میشه که یک دور کامل ماهواره دور زمین، 24 ساعت طول میکشه - اندازهی چرخش وضعی زمین. بنابراین ماهوارهای که توی این مدار باشه، همیشه بالای یک نقطه از سطح زمین ثابت هست. این مدار خاص ارزش زیادی داره، به طوری که برای فرستادن ماهوارهای توی هر نقطه از این مدار، باید اون نقطه رو اجاره کرد! این مدار بیشتر مورد استفادهی ماهوارههای ارتباطی، هواشناسی و... هست که نیاز دارن بالای یک نقطهی خاص از زمین باشن. این مدار به GEO یا Geostationary Earth Orbit معروف هست. بالاتر از GEO هم مداری داریم که ماهوارههایی که توی مدار GEO بازنشسته میشن به سمت این مدار فرستاده میشن و عملاً گورستان ماهوارهها به حساب میاد!
امّا اجازه بدید برگردیم سراغ سنگ خودمون. گفتیم که اگه سنگ رو با سرعت خاصّی پرتاب کنیم مدارش دور زمین به شکل دایره در میاد. امّا اگه از اون سرعت فراتر بریم چطور؟ (توجّه کنید که توی تمام سناریوها سنگ توی راستای خطّ موازی با خطّ مماس به افق پرتاب شده) این دفعه نقطهی پرتاب میشه حضیض مداری و نقطهی مقابلش میشه اوج مداری
اگه این افزایش سرعت رو ادامه بدیم، از یه سرعت معیّنی به بعد (که این سرعت هم باز بستگی به ارتفاع پرتاب داره) دیگه شتاب گرانشی زمین برای کشیدن سنگ به سطح زمین کفایت نمیکنه، بلکه سنگ تحت یه مسیر سهمیشکل که مرکز این سهمی هم خود زمین محسوب میشه، از کنار زمین رد میشه و برای همیشه زمین رو ترک میکنه.
شاتلی که پرتاب شده در حال صعود توی یه مسیر مستقیم و خطّی نیست بلکه مسیرش رو کج کرده. بخاطر این که هیچ موشکی پرتاب نمیشه که صرفاً بره به سمت "بالا"!
بعد از پرتاب و صعود مسافتی به سمت بالا موشک رو کج میکنن تا علاوه بر کسب سرعت توی راستای عمودی، توی راستای افقی هم سرعت کسب کنه. بنابراین اگه بعد از کج کردن موشک و کسب سرعت افقی، موتورهای موشک خاموش بشن، موشک یه مسیر سهمی شکل رو طی میکنه و مجدّداً به زمین بر میگرده. به این نوع پرواز میگن پرواز زیر-مداری و همونطور که توی قسمت قبل هم اشاره شد، اساس کار موشکهای بالستیک به همین شکل هست.
امّا از بحث پرواز زیر-مداری بیایم بیرون. هدف یه موشک فضایی اینه که توی مدار قرار بگیره. همونطور که توی قسمت اوّل بهش اشاره شد، زمانی که موشک توی نقطهی اوج سهمی شروع کنه به افزایش سرعت، بُردش شروع میکنه به افزایش پیدا کردن تا جایی که دیگه به زمین بر نمیگرده بلکه مسیر حرکتش به یه بیضی/دایره دور زمین تبدیل میشه. پس موشکها برای رسیدن به مدار، دقیقاً چنین مراحلی رو طی میکنن: به بالا پرتاب میشن، مسیرشون رو کج میکنن تا علاوه بر سرعت عمودی، سرعت افقی هم کسب کنن و مسیر حرکتشون به یه سهمی تبدیل بشه که نقطهی اوج این سهمی هم خارج از اتمسفر زمین قرار بگیره. بعد از اون زمانی که به اوج میرسن، این سهمی رو به دایره تبدیل میکنن.
امّا گاهی هم نیاز هست موشک به مداری بالاتر بره. این کار شامل دو مرحله هست: اوّل توی راستای حرکت خودش موتورش رو روشن میکنه (نقطهی 1) تا مدارش از فرم دایرهی خارج بشه و به فرم بیضی در بیاد (رنگ قرمز)؛ چیزی که توی قسمت اوّل هم بهش اشاره شد. نقطهای که اقدام به این کار کرده تبدیل میشه به حضیض و نقطهی مقابلش هم اوج. این کار رو تا جایی ادامه میده که اوج اون بیضی برسه به ارتفاعی که قصد داره توی اون باشه. بعد از اون، موتورها رو خاموش میکنه و منتظر مرحلهی دوّم باقی میمونه. مرحلهی دوّم زمانی آغاز میشه که موشک به نقطهی اوج اون بیضی برسه (نقطهی 2). اونجا مجدّداً موتورها رو توی راستای حرکت روشن میکنه تا ارتفاع نقطهی حضیض رو افزایش بده و بیضی رو تبدیل به دایره کنه (رنگ مشکی). حالا دقیقاً توی مدار مورد نظر قرار گرفته.
برای رفتن به مدارهای پایینتر هم دقیقاً عکس همین کار رو انجام میده. اوّل موتورها رو خلاف جهت حرکت روشن میکنه تا سرعتش کمتر بشه (دقیقاً داره ترمز میکنه یا به بیان دیگه، خلاف جهت حرکت گاز میده!) و مدارش از دایره به بیضی تبدیل بشه و این کار رو تا جایی ادامه میده که نقطهی حضیض بیضی که اون سمت مدار هم قرار داره، برسه به مدار مورد نظر. بعد موتورها رو خاموش میکنه، صبر میکنه تا به حضیض برسه و باز موتورها رو خلاف جهت حرکت روشن میکنه تا ارتفاع نقطهی اوج رو هم کاهش بده و مجدّداً بیضی رو به دایره تبدیل کنه.ممکن هست تا قبل از این تصوّر میکردید که یه موشک توی مدار، برای بازگشت به زمین، دماغهاش رو به سمت زمین نشانه میره و موتورها رو روشن میکنه تا به زمین برسه! امّا تا الآن و طبق مطالبی که گفته شد باید حدس زده باشید که اینطور نیست. برای بازگشت از مدار و ورود مجدّد به زمین، موشک دقیقاً همونکاری رو میکنه که برای حرکت به مدارهای پایینتر انجام میده؛ یعنی موتورها رو خلاف جهت چرخش خودش روشن میکنه. با استمرار این کار، نقطهی حضیض بیضی اونقدر پایین میاد که به زمین میرسه و بیضی ما تبدیل به سهمی میشه و به این ترتیب موشک مجدّداً به زمین بر میگرده.
حالا برای یه فرود امن روی سطح زمین (یا توی دریا) معمولاً یا از چتر نجات استفاده میشه (مثل آپولو)، یا فضاپیما فرمی شبیه به هواپیما داره تا مسافتی رو توی اتمسفر پرواز کنه و در نهایت روی باند فرودگاه فرود بیاد (مثل شاتل فضایی) و یا با روشن کردن موتورهای سرعتش رو کنترل کنه و به صورت عمودی روی زمین بشینه (مثل شاهکاره دههی اخیر، موشک Falcon-9). البته دو روش اوّل فقط برای زمین یا سیّارات/اقماری که اتمسفری به غلظت اتمسفر زمین یا بیشتر دارن (مثل یکی از اقمار زحل موسوم به تایتان) کارساز هست. برای سیّارات/اقماری که فاقد اتمسفر هستن (مثل ماه) فقط روش سوّم کارساز هست و برای سیّارات/اقماری که دارای اتمسفری رقیق هستن (مثل مرّیخ) هم از روشهای ترکیبی استفاده میشه (برای مثال استفادهی همزمان از موتورها و چترنجات برای کاهش سرعت و باد کردن کیسههای هوا (چرا میگن کیسهی هوا/airbag در حالی که با هر گازی جز هوا باد میشه؟!!) برای کاهش شدّت ضربه توی لحظهی برخورد).
برعکس قضیه، برای خروج کامل از مدار زمین هم همون روندی طی میشه که برای حرکت به مدارهای بالاتر طی میکنن؛ یعنی توی جهت چرخش، موتورها رو روشن میکنن تا سرعت افزایش پیدا کنه و دایرهای که مدار موشک رو تشکیل میده به بیضی تبدیل بشه، در حالی که خود موشک توی اون لحظه توی حضیض قرار گرفته. هرچقدر سرعت افزایش پیدا کنه، نقطهی اوج بیضی از زمین بیشتر و بیشتر فاصله میگیره تا زمانی که بیضی تبدیل به یه سهمی مثل شکل بالا میشه. حالا موشک موتورها رو خاموش میکنه؛ چرا که موشک اونقدر سرعت گرفته که برای همیشه مدار زمین رو ترک کنه.
بازم احتمالاً تا الآن تصوّر میکردید یه موشک برای ترک زمین، شروع میکنه به حرکت مستقیم به سمت بالا (توی فضا مفهومی بنام بالا و پایین بیمعنی هست. توی مدار زمین، منظور ما از پایین یعنی به سمت مرکز زمین و بالا هم یعنی خلاف جهت مرکز زمین). البته میتونه این کار رو هم بکنه. میتونه موتورها رو روشن کنه و بدون هیچ تغییر جهتی، اونقدر بالا بره و از زمین فاصله بگیره که دیگه گرانش زمین روش تأثیری نداشته باشه و با خاموش کردن موتورها، دیگه به زمین بر نگرده. امّا این کار مستلزم سوخت بسیار بسیار زیادی هست. بجای این کار فقط کافی هست موشک توی مداری دور زمین قرار بگیره و بعد اون مدار رو تبدیل به سهمی کنه. به بیان دیگه، برای ترک زمین، بجای موتورها رو دقیقاً خلاف جهت زمین روشن کنیم و تمام مدّت سعی کنیم با گرانش زمین مبارزه کنیم، با قرار گرفتن توی مدار و تبدیل مدار به سهمی، به نوعی داریم از گرانش خودِ زمین هم کمک میگیریم تا زمین رو ترک کنیم! خودش یه درس زندگی هم میتونه باشه! بجای این که سخت تلاش کنیم،
امّا موشکها ظرفیتشون محدود هست. شاید بتونن ماهوارهی کوچکی بلند کنن و به مدار زمین برسونن امّا هیچ موشکی نداریم که بتونه چیزی به بزرگی یه ایستگاه فضایی (چیزی مثل ISS با ابعاد 108×73 متر و جرم حدود 400 تن) رو توی محفظهی بار خودش جا بده و به مدار زمین برسونه! یا مثلاً اگه ماهوارهی گرونقیمتی توی دچار مشکل شد و از کار افتاد تکلیف چی هست؟ آیا باید همینطوری رها بشه؟
اینجاست که بحث "ملاقات مداری" مطرح میشه؛ یعنی دو جسم مدارشون رو دقیقاً باهم یکی کنن و مهمتر از اون، طوری زمانبندی کنن که توی یک لحظه کنار هم قرار بگیرن و در صورت نیاز (و البته داشتن تجهیزات مناسب) بتونن بهم متّصل هم بشن. به هیچ وجه کار سادهای هم نیست؛ این که به جسمی که جایی توی فضا، با سرعت زیادی در حال چرخش دور زمین هست برسید، سرعتتون رو دقیقاً هماهنگ باهم کنید و بهش متّصل بشید.
فرض کنید رهام توی مدارگردی حول مدار زمین در حال گردش هست (مسیر مشکیرنگ). رهام هم توی فضاپیمایی جداگانه قرار داره و قصد داره به رها ملحق بشه و ملاقاتی فضایی رو تجربه کنن از رهام و رها استفاده میکنم). ، هم لازم هست باهاش توی یک مدار قرار بگیره و هم زمانبندی مناسبی داشته باشه که لحظهی ورود به مدار رهام،رهام هم توی نقطهی ورودش باشه (نه این که اونطرف مدار باشه!). همونطور که قبلاً گفتم، هرچی فاصلهی مدار از زمین بیشتر باشه، سرعت خطّی مدارگرد هم کمتره و برعکس. پس بعد از این که رها از روی زمین پرتاب شد و خودش رو به مدار زمین رسوند و البته مداری که با مدار رهام تا کمکم هام بهش نزدیک بشه و برسه. و برعکس، اگه رهام از اون جلوتر بود، رها میره به مداری پایینتر تا سرعت خطّی بیشتری پیدا کنه و به رهام برسه. به محض این که همدیگه رو دیدن، رها موتورها رو روشن میکنه و مدار خودش رو با مدار رهام یکی میکنه. با این کار سرعت خطّی این دو باهم برابر میشه و با فاصلهی یکسانی توی نزدیکی هم حول زمین پرواز خواهند کرد. توی این مرحله، رها تنظیمات سفینهی خودش رو تغییر میده به فاز پهلوگیری (docking). به کمک فاصلهیاب لیزری، آروم آروم و خیلی دقیق به رهام نزدیک میشه. برای پهلوگیری، یا باید هر دو مدارگرد مجهّز به درگاه پهلوگیری (docking port) باشن که دقیقاً هماندازهی هم و تحت استانداردی خاص ساخته شدن باشن که به محض اتّصال، به همدیگه قفل بشن؛ یا برای گرفتن ماهوارهها (برای سرویسدهی، تعمیرات و...) معمولاً از بازویی رباتیک استفاده میشه که قسمتی از ماهواره که مخصوص همین بازو هم ساخته شده رو بگیره. خلاصه طی فرآیندی وقتگیر و بیاندازه حسّاس، رها ّ درگاه پهلوگیری فضاپیمای خودش رو به درگاه پهلوگیری فضاپیمای رهام برسونه و قفل کنه. بعد از اون دو فضاپیما میتونن منابع خودشون (سوخت، تجهیزات و...) رو به اشتراک بذارن، خدمه بین دو فضاپیما که الآن عملاً یکی شدن رفت و آمد داشته باشن
ملاقات و پهلوگیری فضایی کاربردهای بسیاری داره. مثلاً همونطور که گفتم، مثلاً یه ایستگاه فضایی بسیار بزرگتر از چیزی هست که تماماً توسّط یه موشک به مدار پرتاب بشه. بجای این کار، قطعات مختلف ایستگاه رو به صورت ماژولار روی زمین میسازن و طی پرتابهای مختلف، به مدار زمین ارسال میکنن و اونجا قطعات رو به هم متّصل میکنن تا ایستگاه کمکم کامل بشه (ایستگاه فضایی بینالمللی یا ISS هم به این دلیل بینالمللی خونده میشه که قطعات مختلفش توی کشورهای مختلف (روسیه، آمریکا، اتّحادیهی اروپا، ژاپن، کانادا و...) ساخته و پرتاب شد و حاصل یه همکاری جهانی هست. اوّلین ماژول این ایستگاه، زاریا (Заря - توی روسی به معنای طلوعگاه) بود که توسّط روسیه توی مدار قرار گرفت و ماژول بعدی، یونیتی (Unity - توی انگلیسی به معنای وحدت) بود که توسّط آمریکا پرتاب و به زاریا متّصل شد). همینطور برای رفت و آمد فضانوردها بین ایستگاههای فضایی و زمین و فرستادن امکانات (تجهیزات آزمایشگاهی، آب و خوراک و دارو و امکانات حیاتی، تجهیزات فنّی و سرویسدهی و...) به ایستگاهها هم مرتّب فضاپیماهای مختلف مثل شاتل (آمریکا - البته الآن بازنشسته شده)، سویوز (روسیه)، شنزو (چین)، دراگن (خصوصی - شرکت SpaceX) برای پهلوگیری اعزام میشن.
یا مثلاً زمانی که تلسکوپ فضایی هابل توی مدار زمین دچار نقص فنّی شد، ناسا با اعزام یه شاتل و گرفتن هابل، اقدام به تعمیرش کرد..I
با این فرض، توصیف انتقال حداقل در مقایسه با چرخش، آسان است. مرکز جرم یک جسم دارای موقعیتی در چارچوب مرجع (ترجیحاً اینرسی) است که در طول زمان تغییر می کند. گرانش، کشش و سایر فعل و انفعالات مانند شلیک پیشرانه های انتقالی این مقدار را به عنوان تابعی از زمان تغییر می دهد. این تعاملات را شبیه سازی کنید و سه درجه آزادی (3DOF) شبیه سازی خواهید داشت.مکانیک را می توان به سه شاخه تقسیم کرد: استاتیک، که با نیروهای وارد بر جسم در حال سکون و درون آن سروکار دارد. سینماتیک، که حرکات احتمالی یک جسم یا سیستم اجسام را توصیف می کند. و سینتیک، که تلاش می کند حرکتی را که در یک موقعیت خاص رخ می دهد، توضیح دهد یا پیش بینی کند. روش دیگر، مکانیک ممکن است بر اساس نوع سیستم مورد مطالعه تقسیم شود. ساده ترین سیستم مکانیکی ذره است که به عنوان جسمی به قدری کوچک تعریف می شود که شکل و ساختار درونی آن هیچ نتیجه ای در مسئله داده شده ندارد. پیچیده تر، حرکت سیستمی متشکل از دو یا چند ذره است که بر یکدیگر نیرو وارد می کنند و احتمالاً تحت نیروهای اعمال شده توسط اجسام خارج از سیستم قرار می گیرند.حال پرتابه ای در نظر بگیرید
سرعت پرتاب رو همچنان بالا میبریم. سهمی ما تبدیل به یه مارپیچ (اسپیرال) یا فنر میشه و زمین رو دور میزنه.
با افزایش سرعت اوّلیهی پرتاب، از یه جایی به بعد دیگه سنگ به سطح زمین برخورد نمیکنه بلکه این مارپیچ ما تبدیل به یه بیضی میشه؛ سنگ از نزدیکی سطح زمین رد میشه و دوباره بر میگرده به نقطهای که ازش پرتاب شده و چون توی این مسیر اصطحکاکی وجود نداره (مشروط به این هیچ قسمتی از مسیر با اتمسفر زمین تلاقی نداشته باشه)، سنگ ما برای همیشه توی این مسیر باقی میمونه و رسماً یه قمر از زمین به حساب میاد. دورترین فاصلهی سنگ از زمین (اوج) میشه همون نقطهی پرتابش و نزدیکترین نقطه (حضیض) هم میشه نقطهی مقابلش. مسیر ماه دور زمین و مسیر تمام سیّارات دور خوشید هم چنین شکلی داره. پدیدهی اَبَرماه (supermoon) هم دقیقاً زمانی اتّفاق میفته که ماه توی نقطهی حضیض مدار خودش دور زمین باشه.
با افزایش سرعت اوّلیه توی لحظهی پرتاب، ارتفاع نقطهی حضیض از سطح زمین هم بیشتر و بیشتر میشه (طبیعتاً چون با افزایش حداقل سرعت، حداکثر سرعت هم افزایش پیدا میکنه؛ البته نه به صورت خطّی) و توی یک لحظه، هم سرعت لحظهی پرتاب با سرعت حضیض برابر میشه و هم ارتفاع حضیض با اوج برابر میشه. توی این حالت مدار ما دقیقاً فرم یه دایره رو پیدا میکنه. اکثر ماهوارههایی که دور زمین داریم هم مدار دایره شکلی دارن. هرچقدر ارتفاع سنگ/ماهواره از سطح زمین بیشتر باشه، سرعت اوّلیهای که نیاز هست تا مداری دایرهای شکل تشکیل بشه کمتر خواهد بود.
معمولاً مدار ماهوارههای اطراف زمین رو به سه دسته تقسیم میکنیم؛ چرا که کاربرد و عملکرد ماهوارههایی که توی این سه دسته قرار میگیرن با با بقیهی دستهها تفاوت عمده دارن. مدار پایینی زمین (Low Earth Orbit) شلوغترین مدار هست و غیر از ماهوارههای بسیاری که اونجا مستقر شدن، اکثر سفرهای فضایی سرنشیندار هم به همین مدار صورت میگیره. برای مثال، مدار ایستگاه فضایی بینالمللی (ISS) توی ارتفاع حدود 400 کیلومتری واقع شده و ISS برای موندن توی این مدار از سرعت خطّی حدود 27600 کیلومتر در ساعت برخوردار هست و هر 92 دقیقه یک دور زمین رو دور میزنه. مدار بالاتر از اون، مدار میانی زمین (Medium Earth Orbit) هست که بیشتر ماهوارههای ارتباطی و ناوبری (از جمله مجموعه ماهوارههای GPS) اونجا قرار دارن. و امّا گفتیم که هرچقدر فاصله از سطح زمین بیشتر بشه، سرعت مورد نیاز برای موندن توی مدار کمتر میشه. توی ارتفاع 35876 کیلومتری، سرعت مورد نیاز برای موندن توی مدار دایرهای شکل دور زمین به اندازهای میشه که یک دور کامل ماهواره دور زمین، 24 ساعت طول میکشه - اندازهی چرخش وضعی زمین. بنابراین ماهوارهای که توی این مدار باشه، همیشه بالای یک نقطه از سطح زمین ثابت هست. این مدار خاص ارزش زیادی داره، به طوری که برای فرستادن ماهوارهای توی هر نقطه از این مدار، باید اون نقطه رو اجاره کرد! این مدار بیشتر مورد استفادهی ماهوارههای ارتباطی، هواشناسی و... هست که نیاز دارن بالای یک نقطهی خاص از زمین باشن. این مدار به GEO یا Geostationary Earth Orbit معروف هست. بالاتر از GEO هم مداری داریم که ماهوارههایی که توی مدار GEO بازنشسته میشن به سمت این مدار فرستاده میشن و عملاً گورستان ماهوارهها به حساب میاد!
امّا اجازه بدید برگردیم سراغ سنگ خودمون. گفتیم که اگه سنگ رو با سرعت خاصّی پرتاب کنیم مدارش دور زمین به شکل دایره در میاد. امّا اگه از اون سرعت فراتر بریم چطور؟ (توجّه کنید که توی تمام سناریوها سنگ توی راستای خطّ موازی با خطّ مماس به افق پرتاب شده) این دفعه نقطهی پرتاب میشه حضیض مداری و نقطهی مقابلش میشه اوج مداری
اگه این افزایش سرعت رو ادامه بدیم، از یه سرعت معیّنی به بعد (که این سرعت هم باز بستگی به ارتفاع پرتاب داره) دیگه شتاب گرانشی زمین برای کشیدن سنگ به سطح زمین کفایت نمیکنه، بلکه سنگ تحت یه مسیر سهمیشکل که مرکز این سهمی هم خود زمین محسوب میشه، از کنار زمین رد میشه و برای همیشه زمین رو ترک میکنه.
شاتلی که پرتاب شده در حال صعود توی یه مسیر مستقیم و خطّی نیست بلکه مسیرش رو کج کرده. بخاطر این که هیچ موشکی پرتاب نمیشه که صرفاً بره به سمت "بالا"!
بعد از پرتاب و صعود مسافتی به سمت بالا موشک رو کج میکنن تا علاوه بر کسب سرعت توی راستای عمودی، توی راستای افقی هم سرعت کسب کنه. بنابراین اگه بعد از کج کردن موشک و کسب سرعت افقی، موتورهای موشک خاموش بشن، موشک یه مسیر سهمی شکل رو طی میکنه و مجدّداً به زمین بر میگرده. به این نوع پرواز میگن پرواز زیر-مداری و همونطور که توی قسمت قبل هم اشاره شد، اساس کار موشکهای بالستیک به همین شکل هست.
امّا از بحث پرواز زیر-مداری بیایم بیرون. هدف یه موشک فضایی اینه که توی مدار قرار بگیره. همونطور که توی قسمت اوّل بهش اشاره شد، زمانی که موشک توی نقطهی اوج سهمی شروع کنه به افزایش سرعت، بُردش شروع میکنه به افزایش پیدا کردن تا جایی که دیگه به زمین بر نمیگرده بلکه مسیر حرکتش به یه بیضی/دایره دور زمین تبدیل میشه. پس موشکها برای رسیدن به مدار، دقیقاً چنین مراحلی رو طی میکنن: به بالا پرتاب میشن، مسیرشون رو کج میکنن تا علاوه بر سرعت عمودی، سرعت افقی هم کسب کنن و مسیر حرکتشون به یه سهمی تبدیل بشه که نقطهی اوج این سهمی هم خارج از اتمسفر زمین قرار بگیره. بعد از اون زمانی که به اوج میرسن، این سهمی رو به دایره تبدیل میکنن.
امّا گاهی هم نیاز هست موشک به مداری بالاتر بره. این کار شامل دو مرحله هست: اوّل توی راستای حرکت خودش موتورش رو روشن میکنه (نقطهی 1) تا مدارش از فرم دایرهی خارج بشه و به فرم بیضی در بیاد (رنگ قرمز)؛ چیزی که توی قسمت اوّل هم بهش اشاره شد. نقطهای که اقدام به این کار کرده تبدیل میشه به حضیض و نقطهی مقابلش هم اوج. این کار رو تا جایی ادامه میده که اوج اون بیضی برسه به ارتفاعی که قصد داره توی اون باشه. بعد از اون، موتورها رو خاموش میکنه و منتظر مرحلهی دوّم باقی میمونه. مرحلهی دوّم زمانی آغاز میشه که موشک به نقطهی اوج اون بیضی برسه (نقطهی 2). اونجا مجدّداً موتورها رو توی راستای حرکت روشن میکنه تا ارتفاع نقطهی حضیض رو افزایش بده و بیضی رو تبدیل به دایره کنه (رنگ مشکی). حالا دقیقاً توی مدار مورد نظر قرار گرفته.
برای رفتن به مدارهای پایینتر هم دقیقاً عکس همین کار رو انجام میده. اوّل موتورها رو خلاف جهت حرکت روشن میکنه تا سرعتش کمتر بشه (دقیقاً داره ترمز میکنه یا به بیان دیگه، خلاف جهت حرکت گاز میده!) و مدارش از دایره به بیضی تبدیل بشه و این کار رو تا جایی ادامه میده که نقطهی حضیض بیضی که اون سمت مدار هم قرار داره، برسه به مدار مورد نظر. بعد موتورها رو خاموش میکنه، صبر میکنه تا به حضیض برسه و باز موتورها رو خلاف جهت حرکت روشن میکنه تا ارتفاع نقطهی اوج رو هم کاهش بده و مجدّداً بیضی رو به دایره تبدیل کنه.ممکن هست تا قبل از این تصوّر میکردید که یه موشک توی مدار، برای بازگشت به زمین، دماغهاش رو به سمت زمین نشانه میره و موتورها رو روشن میکنه تا به زمین برسه! امّا تا الآن و طبق مطالبی که گفته شد باید حدس زده باشید که اینطور نیست. برای بازگشت از مدار و ورود مجدّد به زمین، موشک دقیقاً همونکاری رو میکنه که برای حرکت به مدارهای پایینتر انجام میده؛ یعنی موتورها رو خلاف جهت چرخش خودش روشن میکنه. با استمرار این کار، نقطهی حضیض بیضی اونقدر پایین میاد که به زمین میرسه و بیضی ما تبدیل به سهمی میشه و به این ترتیب موشک مجدّداً به زمین بر میگرده.
حالا برای یه فرود امن روی سطح زمین (یا توی دریا) معمولاً یا از چتر نجات استفاده میشه (مثل آپولو)، یا فضاپیما فرمی شبیه به هواپیما داره تا مسافتی رو توی اتمسفر پرواز کنه و در نهایت روی باند فرودگاه فرود بیاد (مثل شاتل فضایی) و یا با روشن کردن موتورهای سرعتش رو کنترل کنه و به صورت عمودی روی زمین بشینه (مثل شاهکاره دههی اخیر، موشک Falcon-9). البته دو روش اوّل فقط برای زمین یا سیّارات/اقماری که اتمسفری به غلظت اتمسفر زمین یا بیشتر دارن (مثل یکی از اقمار زحل موسوم به تایتان) کارساز هست. برای سیّارات/اقماری که فاقد اتمسفر هستن (مثل ماه) فقط روش سوّم کارساز هست و برای سیّارات/اقماری که دارای اتمسفری رقیق هستن (مثل مرّیخ) هم از روشهای ترکیبی استفاده میشه (برای مثال استفادهی همزمان از موتورها و چترنجات برای کاهش سرعت و باد کردن کیسههای هوا (چرا میگن کیسهی هوا/airbag در حالی که با هر گازی جز هوا باد میشه؟!!) برای کاهش شدّت ضربه توی لحظهی برخورد).
برعکس قضیه، برای خروج کامل از مدار زمین هم همون روندی طی میشه که برای حرکت به مدارهای بالاتر طی میکنن؛ یعنی توی جهت چرخش، موتورها رو روشن میکنن تا سرعت افزایش پیدا کنه و دایرهای که مدار موشک رو تشکیل میده به بیضی تبدیل بشه، در حالی که خود موشک توی اون لحظه توی حضیض قرار گرفته. هرچقدر سرعت افزایش پیدا کنه، نقطهی اوج بیضی از زمین بیشتر و بیشتر فاصله میگیره تا زمانی که بیضی تبدیل به یه سهمی مثل شکل بالا میشه. حالا موشک موتورها رو خاموش میکنه؛ چرا که موشک اونقدر سرعت گرفته که برای همیشه مدار زمین رو ترک کنه.
بازم احتمالاً تا الآن تصوّر میکردید یه موشک برای ترک زمین، شروع میکنه به حرکت مستقیم به سمت بالا (توی فضا مفهومی بنام بالا و پایین بیمعنی هست. توی مدار زمین، منظور ما از پایین یعنی به سمت مرکز زمین و بالا هم یعنی خلاف جهت مرکز زمین). البته میتونه این کار رو هم بکنه. میتونه موتورها رو روشن کنه و بدون هیچ تغییر جهتی، اونقدر بالا بره و از زمین فاصله بگیره که دیگه گرانش زمین روش تأثیری نداشته باشه و با خاموش کردن موتورها، دیگه به زمین بر نگرده. امّا این کار مستلزم سوخت بسیار بسیار زیادی هست. بجای این کار فقط کافی هست موشک توی مداری دور زمین قرار بگیره و بعد اون مدار رو تبدیل به سهمی کنه. به بیان دیگه، برای ترک زمین، بجای موتورها رو دقیقاً خلاف جهت زمین روشن کنیم و تمام مدّت سعی کنیم با گرانش زمین مبارزه کنیم، با قرار گرفتن توی مدار و تبدیل مدار به سهمی، به نوعی داریم از گرانش خودِ زمین هم کمک میگیریم تا زمین رو ترک کنیم! خودش یه درس زندگی هم میتونه باشه! بجای این که سخت تلاش کنیم،
امّا موشکها ظرفیتشون محدود هست. شاید بتونن ماهوارهی کوچکی بلند کنن و به مدار زمین برسونن امّا هیچ موشکی نداریم که بتونه چیزی به بزرگی یه ایستگاه فضایی (چیزی مثل ISS با ابعاد 108×73 متر و جرم حدود 400 تن) رو توی محفظهی بار خودش جا بده و به مدار زمین برسونه! یا مثلاً اگه ماهوارهی گرونقیمتی توی دچار مشکل شد و از کار افتاد تکلیف چی هست؟ آیا باید همینطوری رها بشه؟
اینجاست که بحث "ملاقات مداری" مطرح میشه؛ یعنی دو جسم مدارشون رو دقیقاً باهم یکی کنن و مهمتر از اون، طوری زمانبندی کنن که توی یک لحظه کنار هم قرار بگیرن و در صورت نیاز (و البته داشتن تجهیزات مناسب) بتونن بهم متّصل هم بشن. به هیچ وجه کار سادهای هم نیست؛ این که به جسمی که جایی توی فضا، با سرعت زیادی در حال چرخش دور زمین هست برسید، سرعتتون رو دقیقاً هماهنگ باهم کنید و بهش متّصل بشید.
فرض کنید رهام توی مدارگردی حول مدار زمین در حال گردش هست (مسیر مشکیرنگ). رهام هم توی فضاپیمایی جداگانه قرار داره و قصد داره به رها ملحق بشه و ملاقاتی فضایی رو تجربه کنن از رهام و رها استفاده میکنم). ، هم لازم هست باهاش توی یک مدار قرار بگیره و هم زمانبندی مناسبی داشته باشه که لحظهی ورود به مدار رهام،رهام هم توی نقطهی ورودش باشه (نه این که اونطرف مدار باشه!). همونطور که قبلاً گفتم، هرچی فاصلهی مدار از زمین بیشتر باشه، سرعت خطّی مدارگرد هم کمتره و برعکس. پس بعد از این که رها از روی زمین پرتاب شد و خودش رو به مدار زمین رسوند و البته مداری که با مدار رهام تا کمکم هام بهش نزدیک بشه و برسه. و برعکس، اگه رهام از اون جلوتر بود، رها میره به مداری پایینتر تا سرعت خطّی بیشتری پیدا کنه و به رهام برسه. به محض این که همدیگه رو دیدن، رها موتورها رو روشن میکنه و مدار خودش رو با مدار رهام یکی میکنه. با این کار سرعت خطّی این دو باهم برابر میشه و با فاصلهی یکسانی توی نزدیکی هم حول زمین پرواز خواهند کرد. توی این مرحله، رها تنظیمات سفینهی خودش رو تغییر میده به فاز پهلوگیری (docking). به کمک فاصلهیاب لیزری، آروم آروم و خیلی دقیق به رهام نزدیک میشه. برای پهلوگیری، یا باید هر دو مدارگرد مجهّز به درگاه پهلوگیری (docking port) باشن که دقیقاً هماندازهی هم و تحت استانداردی خاص ساخته شدن باشن که به محض اتّصال، به همدیگه قفل بشن؛ یا برای گرفتن ماهوارهها (برای سرویسدهی، تعمیرات و...) معمولاً از بازویی رباتیک استفاده میشه که قسمتی از ماهواره که مخصوص همین بازو هم ساخته شده رو بگیره. خلاصه طی فرآیندی وقتگیر و بیاندازه حسّاس، رها ّ درگاه پهلوگیری فضاپیمای خودش رو به درگاه پهلوگیری فضاپیمای رهام برسونه و قفل کنه. بعد از اون دو فضاپیما میتونن منابع خودشون (سوخت، تجهیزات و...) رو به اشتراک بذارن، خدمه بین دو فضاپیما که الآن عملاً یکی شدن رفت و آمد داشته باشن
ملاقات و پهلوگیری فضایی کاربردهای بسیاری داره. مثلاً همونطور که گفتم، مثلاً یه ایستگاه فضایی بسیار بزرگتر از چیزی هست که تماماً توسّط یه موشک به مدار پرتاب بشه. بجای این کار، قطعات مختلف ایستگاه رو به صورت ماژولار روی زمین میسازن و طی پرتابهای مختلف، به مدار زمین ارسال میکنن و اونجا قطعات رو به هم متّصل میکنن تا ایستگاه کمکم کامل بشه (ایستگاه فضایی بینالمللی یا ISS هم به این دلیل بینالمللی خونده میشه که قطعات مختلفش توی کشورهای مختلف (روسیه، آمریکا، اتّحادیهی اروپا، ژاپن، کانادا و...) ساخته و پرتاب شد و حاصل یه همکاری جهانی هست. اوّلین ماژول این ایستگاه، زاریا (Заря - توی روسی به معنای طلوعگاه) بود که توسّط روسیه توی مدار قرار گرفت و ماژول بعدی، یونیتی (Unity - توی انگلیسی به معنای وحدت) بود که توسّط آمریکا پرتاب و به زاریا متّصل شد). همینطور برای رفت و آمد فضانوردها بین ایستگاههای فضایی و زمین و فرستادن امکانات (تجهیزات آزمایشگاهی، آب و خوراک و دارو و امکانات حیاتی، تجهیزات فنّی و سرویسدهی و...) به ایستگاهها هم مرتّب فضاپیماهای مختلف مثل شاتل (آمریکا - البته الآن بازنشسته شده)، سویوز (روسیه)، شنزو (چین)، دراگن (خصوصی - شرکت SpaceX) برای پهلوگیری اعزام میشن.
یا مثلاً زمانی که تلسکوپ فضایی هابل توی مدار زمین دچار نقص فنّی شد، ناسا با اعزام یه شاتل و گرفتن هابل، اقدام به تعمیرش کرد..I
-
rohamavation
نام: roham hesami radرهام حسامی راد
محل اقامت: 100 مایلی شمال لندن جاده آیلستون، لستر، لسترشر. LE2
عضویت : سهشنبه ۱۳۹۹/۸/۲۰ - ۰۸:۳۴
پست: 3278-
سپاس: 5494
- جنسیت:
تماس:
Re: هوافضا
که یه موشک، سوخت داخل خودش رو مشتعل میکنه (طبیعتاً برخلاف موتور جت که اکسیژن این اشتعال رو از دریچههای ورودی هوا دریافت میکنه، موشک نیاز داره که علاوه بر سوخت، اکسیدکننده هم با خودش حمل کنه؛ چرا که توی خلاء، اکسیژنی وجود نداره و بدون وجود اکسیدکننده، سوخت هرگز مشتعل نمیشه) و با سرعت زیاد از نازلهای خروجی بیرون میده و تکانهی ایجاد شده، موشک رو هم در خلاف جهت به جلو پیش میبره. بدیهیه که هر موشکی که بخواد از سطح زمین بلند بشه، موتورش باید بتونه نیرویی ایجاد کنه که به نیروی وزن خود موشک غلبه کنه و اون رو بلند کنه. امّا یه مشکلی هست: سوخت هم طبیعتاً جرم داره! درواقع بیشتر جرم یه موشک رو سوختش تشکیل میده. و مشکل اینه که برای چنین مأموریتی، سوخت مورد نیاز به حدّی هست که جرم موشک رو طوری بالا میبره که دیگه توان موتورهای موشک برای غلبه به نیروی وزن و بلند کردن موشک کافی نیست! برای تجسّم بهتر، فرض کنید شما مثلاً ساکن تهران هستید و جز یه پمپ بنزین توی خود تهران ، هیچ پمپ بنزینی توی هیچ نقطهای از جهان وجود نداره! باک بنزین ماشین شما فقط در حدّی ظرفیت داره که به شهرهای اطراف برید و برگردید. اگه بخواید دورتر برید مجبورید چندتا تانکر اضافه هم توی صندوق عقب یا روی سقف ماشین جا بدید. شاید از این راه بتونید خودتون رو تا اصفهان برسونید. امّا اگه مقصدتون لندن باشه چی؟ از تهران تا لندن با ماشین شخصی، در حالی که فقط یه پمپ بنزین توی تهران هست و دیگه هیچجا. بنزین مورد نیاز برای چنین سفری اندازهی یه تانکر بزرگ نفتی میشه. و مشکل اینه که این تانکر بزرگ پر از بنزین، اونقدر سنگین هست که اگه اون رو به ماشین وصل کنید یا روی سقف ماشین بذارید، ماشین اونقدر سنگین میشه که اصلاً دیگه حرکت نمیکنه!
راه حل اینه که موشک رو چند قسمتی بکنن. هر قسمت موتور و سوخت مجزّای خودش رو داره. با استفادهی کاملِ سوخت هر قسمت، کلّ اون قسمت از موشک جدا میشه و قسمت بعدی شروع به کار میکنه. فضاپیمای آپولو 11 روی موشک غولپیکر ساترن پنج (Saturn V) سوار شد و توسّط این موشک چند مرحلهای به فضا رفت.
اوّلین مرحله از موشک ساترن 5 که غولپیکرترین قسمتش هم هست (با ارتفاع 42 متر و قطر 10 متر) رو توی تصویر بالا میتونید ببینید. پنج موتور F-1 همزمان با تمام توان کار میکنن تا کلّ موشک رو از زمین بلند کنن - امّا فقط برای 168 ثانیه!! 770هزار لیتر سوخت، توی همین مدّت کوتاه سوزونده میشه تا کلّ موشک رو بالا ببره و از اتمسفر خارج کنه. بعد از اون جدا میشه و بقایای اون توی اقیانوس سقوط میکنه.
تا این مرحله، موشک تقریباً از اتمسفر خارج شده و مقاومت هوا دیگه چندان روش تأثیری نداره. امّا هنوز راه زیادی (سرعت زیادی!) تا قرار گرفتن توی مدار زمین رو در پیش داره. مرحلهی دوّم (تصویر بالا) فعّال میشه. این بخش کوچکتر هست (25 متر ارتفاع) و از پنج موتور ضعیفتر J-2 بهره میبره. حتّی سوخت مورد استفادهاش هم به کلّی با مرحلهی قبل فرق داره. اصلاً شرکت سازندهاش هم با شرکت سازندهی قسمت قبلی فرق داره و دو پیمانکار کاملاً مستقل هستن. چون اینجا دیگه هم موشک سرعت زیادی گرفته به لطف مرحلهی قبل و هم با مقاومت هوا درگیری چندانی وجود نداره و سازوکار کاملاً متفاوت خواهد بود. این بخش هم برای 384ثانیه کار میکنه تا به موشک سرعت خطّی بده و اون رو آماده برای قرارگیری توی مدار زمین کنه (در حال حاضر مسیر پیش روی موشک، یه بیضی هست که اوجش رو محل فعلی موشک تشکیل میده ولی حضیضش پایینتر از سطح زمین هست! یعنی اگه موشک رو توی همین حالت رها کنن، دوباره به اتمسفر بر میگرده و جایی اون سمت سیّاره به زمین برخورد میکنه). بعد از اتمام سوخت، این مرحله هم رها میشه و باقیماندهی اون، سمت دیگهی سیّاره به زمین برخورد میکنه. لحظاتی بعد از جداسازی، مرحلهی سوّم شروع به کار میکنه.
گریز از بحث اصلی: از عنوان عکس بالا یه ممکنه پرسش کوچکی براتون پیش بیاد. مگه IV توی رومی برابر 4 نیست؟ پس چرا اسم مرحلهی سوّم رو گذاشتن S-IV؟ دلیلش اینه که Saturn V خودش زیرمجموعهای از خانوادهی موشکهای Saturn هست. یکی از طرحهای اوّلیهی قبل از Saturn V، موشک Saturn C (همراه زیرمجموعهی خودش) بود که بخش S-III براش طرّاحی شده بود. امّا بعد از اون S-IV و S-IVB طرّاحی و تولید شد و توی موشکهایی مثل Saturn IB به عنوان مرحلهی دوّم مورد استفاده قرار گرفت (مأموریت Apollo 7 به مقصد مدار پایینی زمین هم با همین موشک انجام گرفت). پس برای طرّاحی Saturn V هم تصمیم گرفتن طرحهای S-III رو رها کنن و بجاش S-IVB رو به عنوان مرحلهی سوّم این موشک استفاده کنن.
ادامهی بحث: مرحلهی سوّم کوچکتر بود (ارتفاع 17.8 متر) و فقط یک موتور J-2 داشت. این موتور، دوبار خاموش و روشن شد. بار اوّل درست بعد از جداسازی مرحلهی دوّم بود و با این هدف انجام شد که سرعت خطّی رو افزایش بده، ارتفاع حضیض افزایش بده و رسماً موشک رو توی مدار دایرهای شکلی دور زمین قرار بده. بعد از قرار گرفتن توی مدار پایینی زمین، موتور رو خاموش کردن و 1.5 دور چرخش دور زمین انجام شد. بعد از اون، موتور برای دوّمین بار توی جهت چرخش روشن شد تا سرعت خطّی رو افزایش بده و درست طبق چیزی که قبلاً توضیح داده شد، مدار به شکل بیضی در بیاد و ارتفاع نقطهی اوج افزایش پیدا کنه و با مدار ماه تداخل پیدا کنه. امّا از قبل طوری محاسبه و برنامهریزی شده بود که نقطهی اوج، جایی با مدار ماه تلاقی پیدا کنه که خود ماه هم تا زمان رسیدن موشک، اون اطراف حضور داشته باشه (نه این که اونطرف مدار باشه) به طوری که موشک توی میدان گرانشی ماه قرار بگیره (البته با ورود به میدان گرانشی ماه هم پروسههایی لازم هست دنبال بشه تا بجای برخورد با سطح ماه و یا گذر از کنار ماه، موشک توی مداری حول ماه قرار بگیره که بعداً بهش خواهیم پرداخت). این فرآیند به Trans-lunar Injection معروف هست و ترک زمین (Earth Departure) صورت میگیره.
برای ارسال فضاپیما/کاوشگر به سایر سیّارات هم از همین روش استفاده میشه؛ امّا Transfer Injection باید اونقدر قوی باشه که مدار موشک از دایره به سهمی تبدیل بشه و موشک کاملاً میدان گرانشی زمین رو ترک کنه و وارد فضای بین سیّارهای بشه ضمناً برنامهریزی هم طوری باشه که سهمی با مدار سیّارهی مورد نظر تداخل پیدا کنه و مهمتر از اون، خود سیّاره هم زمان رسیدن موشک به اون نقطه، اطراف اون نقطه باشه و موشک رو تحت تأثیر میدان گرانشی خودش قرار بده.
با اتمام سوخت مرحلهی سوّم، این مرحله هم از موشک جدا میشه. امّا دیگه مثل دو مرحلهی قبل خبری از بازگشت به زمین، ورود مجدّد به اتمسفر و سوختن نیست! مدار این قسمت به همون شکلی هست که این قسمت براش استفاده شد: یه بیضی بزرگ که حضیضش با مدار پایینی زمین تداخل داره و اوجش هم بالاتر از مدار ماه. بخش سوّم موشک یا همون S-IVB، بعد از استفاده و جداسازی، به سمت ورای مدار ماه حرکت کرد و با کمک کشش گرانشی ماه، وارد فضای بین سیّارهای شد. همین الآن هم جایی توی منظومهی شمسی داره حول خورشید میچرخه.
گریز از بحث اصلی: S-IVB آپولو 13 به سطح ماه برخورد کرد و از بین رفت. البته هرگز اوّلین زبالهی بشر روی سطح ماه به حساب نمیاد. همونطور که گفته شد پیش از آپولو 11 - درواقع از یک دهه قبل از اون - هم آمریکا و هم شوروی کاوشگرهای بدون سرنشین مختلفی رو به ماه فرستاده بودن. برخی از اونها به عنوان ماهواره/مدارگرد توی مدار ماه قرار گرفتن؛ برخی عامدانه و بدون کاهش سرعت به سطح ماه کوبیده شدن و تونستن قبل از نابود شدن، تصاویر و دادههایی از ماه مخابره کنن؛ برخی هم با کاهش سرعت، به نرمی و به صورت کنترل شده روی سطح ماه فرود اومدن و اوّلین تصاویر رو از سطح ماه مخابره کردن.
امّا اصل کار، محمولهای بود که توی تصویر بالا میبینید و مراحل S-IC و S-II و S-IVB همگی استفاده شدن فقط برای این که محمولهی بالا - که مهمترین محتویاتش هم خودِ سرنشینها هستن! - رو به سمت ماه پرت کنن. تازه فقط 25% مأموریت انجام شده و هنوز مراحل زیادی باقی مونده برای انجام یه فرود سرنشیندار به سطح ماه و بازگشت به زمین. توی قسمت چهارم از مکانیک فضایی به زبان ساده، خواهیم پرداخت به محتویات این محموله که داره با سرعت زیادی به سمت ماه حرکت میکنه و مراحل آتی مأموریت، شرح داده میشن.
اوّل از همه به راکت کوچکی که بالای این محموله و در حقیقت نوک موشک نصب شده توجّه کنید. این راکت که از سوخت جامد بهره میبره، برای مواقع اضطراری تعبیه شده. این برجک که به سیستم فرار از پرتاب (Launch Escape System) معروف هست، مستقیماً به قسمتی که سرنشینها داخلش قرار دارن متّصل شده و در صورت بروز حادثه توی مراحل اوّلیهی پرتاب موشک، این سیستم رو فعّال میکنن تا ضمن جدا کردن قسمت سرنشینها از موشک، اون رو به کمک شتاب شدیدی که این راکت کوچک برای چند لحظه تولید میکنه از بقیهی موشک دور کنه. درست شبیه صندلی ایجکتی که توی هواپیماهای نظامی تعبیه میشه؛ با این تفاوت که بجای پرتاب کردن سرنشینها به بیرون از کابین، کلّ کابین جدا و پرتاب میشه تا بعد به کمک چتر نجات فرود بیاد.
طبیعتاً زمانی که موشک توی مدار زمین قرار بگیره، این سیستم دیگه هیچ کاربردی نخواهد داشت و حتّی درصورت بروز حادثه هم نمیتونه کمکی به نجات فضانوردها بکنه. بنابراین دقایقی بعد از پرتاب از موشک جدا میشه.
امّا چیزی که برجک نجاتِ یادشده بهش متّصل شده بود و وظیفهی نجات اون در صورت بروزحادثه رو داشت، مهمترین قسمت موشک هست؛ یعنی ماژول فرماندهی (Command Module یا به اختصار، CM) و با اسم مستعار "Columbia". کپسولی حامل سه فضانورد و پنل کنترل. در قسمت بالایی این کپسول مخروطیشکل، docking portـی تعبیه شده که امکان پهلوگیری و اتّصال کپسول توی فضا رو فراهم میسازه. همینطور مجهّز هست به تجهیزات دیگهای مثل چتر نجات، سپر حرارتی و... که جلوتر به اونها خواهیم پرداخت.
ماژول فرماندهی خودش به بخش دیگهای موسوم به ماژول سرویس (Service Module یا به اختصار، SM) متّصل میشه؛ شامل یک موتور اصلی، سوخت و اکسیدکننده، تجهیزات ارتباطی و سیستمهایی برای چرخش و حرکات جزئی توی فضا که برای فرآیند Docking حیاتی هست.
درست زیر این قسمت، ماژول مجزّایی قرار گرفته، موسم به ماژول فرود (Landing Module یا به اختصار، LM) و با اسم مستعار "Eagle". در ابتدا قرار بود فضاپیمای آپولو به گونهای طرّاحی بشه که کلّ فضاپیما شامل هر سه فضانورد روی سطح ماه فرود بیاد و بعد از اتمام مأموریت، مجدّداً از سطح ماه بلند بشه و به زمین برگرده. امّا مشکلی وجود داشت: سوخت مورد نیاز برای چنین کاری اونقدر زیاد بود اساساً موشک دیگه نمیتونست بعد از فرود روی سطح ماه، مجدّداً بلند بشه! پس بجای این کار، تصمیم دیگهای گرفته شد. ماژولهای فرماندهی و سرویس (CSM) به همون شکلی که بالاتر توضیح داده شد طرّاحی شد که وظیفه داره توی مدار ماه قرار بگیره. در عوض یک ماژول مجزّای دیگه یعنی همون ماژول فرود، روی سطح ماه فرود میاد و بعد از اتمام مأموریت، مجدّداً از سطح ماه بلند میشه، خودش رو به مدار میرسونه تا به CSM پهلوگیری کنه. بالای این قسمت هم docking portـی تعبیه شده که امکان پهلوگیری CSM رو فراهم کنه. در ادامه بیشتر راجع بهش توضیح داده میشه.
برگردیم به سناریوی اصلی. محمولهای شامل CSM و محفظهی باری شامل LM رو داریم قسمت سوّم موشک ساترن 5 یعنی S-IVB هم به انتهای اون متّصل هست و همگی توی مسیری به سمت ماه قرار گرفتن. اینجا فرآیند مهمّی کلید میخوره. درست مثل تصویر زیر، ابتدا دیوارههای محفظهی بار جدا میشن. بعد از اون، CSM چرخشی صد و هشتاد درجهای میکنه و آروم آروم به LM که توی محفظهی بار قرار گرفته نزدیک میشه تا به اون پهلوگیری کنه. بعد از پهلوگیری، LM رو از قسمت بار جدا میکنه.
مجموعه همچنان با سرعت زیادی (که به لطف سه بخش موشک Saturn V ایجاد شده) به سمت ماه در حال حرکت هست. امّا با این سرعت و توی این مسیر، سرانجامی جز برخوردی شهابسنگوار به سطح ماه نخواهد داشت! بنابراین با نزدیک شدن به ماه، موتور نصب شده روی SM فعّال شد تا سرعت رو کاهش بده و مسیر رو تصیح کنه تا CSM به همراه LM که بهش متّصل شده، توی مدار ماه قرار بگیرن - درست طبق چیزی که توی قسمت دوّم از سری مکانیک فضایی توضیح داده شد.
امّا بریم داخل فضاپیما. سه سرنشین آپولو 11 توی CM حضور داشتن: نیل آرمسترانگ (فرمانده)، باز آلدرین (خلبان LM) و مایکل کالینز (خلبان CM) بودن. هرسه، تخصّصهای خودشون رو داشتن و پیشتر هم سفرهای فضایی رو تجربه کرده بودن و اوّلینباری نبود که عازم فضا میشدن. مأموریت به این صورت برنامهریزی شده بود که مایکل کالینز تمام مدّت توی CM بمونه و هدایت اون رو به عهده داشته باشه؛ در حالی که باز آلدرین و نیل آرمسترانگ وارد LM میشن تا به سطح ماه فرود بیان.
برای فرود به سطح ماه، منطقهای موسوم به «دریاوارهی آسایش - Mare Tranquillitatis» به عنوان گزینهی شمارهی یک انتخاب شده بود. چهار سال قبل، کاوشگر Ranger 8 داخل همین منطقه سقوط عامدانه کرده بود و پیش از برخورد، هزاران عکس به زمین مخابره کرده بود. همینطور دو سال بعد از Ranger 8 هم کاوشگر سطحنشین Surveyor 5 توی این منطقه فرود اومده بود. تحلیل دادههای هر دو کاوشگر و نقشهبرداریهایی که از سطح ماه انجام شده بود، گویای این بود که این منطقه سطح نسبتاً صاف و مناسبی برای فرود داره و همینطور از نظر ژئولوژی هم مکان مناسب و غنیای برای تحقیق و اکتشاف هست.
بعد از انتقال آرمسترانگ و آلدرین از CM به LM و رسیدن به موقعیت مناسب، دو ماژول از هم جدا شدن و LM موتورش رو درست خلاف مسیر چرخش توی مدار روشن کرد تا با کاهش سرعت خطّی، نقطهی حضیض مداری رو به ماه نزدیک و نزدیکتر بکنه؛ تا جایی که مسیر حرکت LM از دایرهای به دور ماه، به سهمیای تبدیل بشه که به سطح ماه میرسه (توی قسمت دوّم این سری راجع بهش بحث شد). به این ترتیب، کالینز تنها توی CM و توی مدار ماه باقی میمونه و آرمسترانگ و آلدرین، داخل LM وارد مرحلهی فرود به سطح ماه میشن.
ماژول فرود خودش از دو قسمت تشکیل شده. همونطوری که توی تصویر میبینید، قسمت پایینی شامل موتوری هست که دو بار مورد استفاده قرار گرفت: یک بار برای کاهش سرعت خطّی توی مدار و قرار گرفتن توی مسیر فرود و یک بار هم برای کاهش سرعت قبل از فرود تا فرود به نرمی و آرامی روی سطح ماه انجام بشه. چهار پایهی ظریف قابل جمع شدن، LM رو روی سطح ماه نگه میدارن. محفظهی باری هم توی همین قسمت تعبیه شده که شامل خودروی ماهنورد و تجهیزات علمی میشه. امّا قسمت دیگهی LM، کابین سرنشینها رو تشکیل میده. این قسمت دارای موتور و سوختی مجزّا هست که از قسمت پایینی جدا میشه و برای برخاستن از سطح ماه مورد استفاده قرار میگیره.
با قرار گرفتن LM توی مسیر کاهش ارتفاع، یکی از حسّاسترین و مخاطرهآمیزترین مراحل این مأموریت آغاز میشه: فرود. با فعّالسازی موتور انتهایی LM، سرعت رو به گونهای کاهش میدن که پیش از اتمام سوخت، LM به سطح ماه برسه و به آرامی روی سطح فرود بیاد. استفادهی بیش از حد از موتور باعث اتمام زودتر از موعد سوخت میشه و استفادهی کمتر از حد از موتور هم نمیتونه سرعت رو به حدّی کاهش بده که فرود امنی اتّفاق بیفته. هر خطایی میتونه منجر به برخورد سخت LM به سطح ماه بشه که توی محتملترین حالت موجب مرگ آنی آرمسترانگ و آلدرین میشه و توی بهترین حالت هم اونقدر به LM آسیب میزنه که امکان برخاست مجدّد از سطح ماه ازش سلب میشه و در هر دو صورت، کالینز ناچار به ترک اجساد همقطارانش (همفضاپیمایانش!) روی سطح ماه و بازگشت تنها به زمین خواهد شد. امّا به لطف مهندسی بینظیری که حاصل دسترنج هزاران متخصص و پیمانکار بود، این اتّفاق رخ نمیده و پایههای LM به نرمی سطح ماه رو لمس میکنن. اوّلین فرود سرنشیندار بشر روی ماه!
، LM خودش متشکل از دو قسمت بود:
بخش فرود (Descent Stage): شامل پایههایی برای فرود به سطح ماه، موتور، سوخت و اکسیدکنندهی لازم برای deorbit شدن از مدار ماه و فرودی کنترل شده به سطح ماه و همینطور محفظهای برای جاسازی تجهیزاتی که روی سطح ماه مورد استفاده قرار گرفتن. علاوه بر اون، این بخش به عنوان سکّوی پرتاب بخش بعدی برای برخاست مجدّد از سطح ماه و رسیدن به مدار هم استفاده میشد.
بخش صعود (Ascent Stage): شامل تجهیزات ارتباطی، کابین خدمه و تجهیزات کنترلی، موتور و سوخت جداگانه برای برخاست مجدّد از سطح ماه، رسیدن به مدار و ملاقات با CSM؛ و همینطور سیستم کنترل واکنش (Reaction Control System - RCS) جهت پایداری و کنترل ماژول برای پهلوگیری و اتّصال به CSM.
با اتمام مأموریت و کامل کردن برنامههایی که برای روی سطح ماه در نظر گرفته شده بود، آرمسترانگ و آلدرین برای آخرینبار به LM بر میگردن. برخلاف فرود که جز نمای دوربینهای داخلی LM، تصویری ازش موجود نیست، صحنهی صعود توسّط دوربینهایی که خود خدمه روی سطح ماه کار گذاشته بودن به تصویر کشیده میشه. بخش صعود، طی یه نیروی انفجاری از بخش فرود جدا و به بالا پرتاب شده و همزمان موتور هم برای فعّال میشه.
برخاست از سطح ماه و قرارگیری در مدار، بسیار سادهتر از زمین هست. علاوه بر گرانش کمتر که هم به پیشران کمتری جهت اوجگیری نیاز داشته و هم سرعت خطّی کمتری جهت قرارگیری در یک مدار پایدار نیاز داره، عدم وجود اتمسفر هم موجب نبود مقاومت هوا میشه. به همین خاطر، بخش صعود LM (یا به اختصار، LM APS)، بدون دشواری چندانی از سطح ماه بلند شده و بعد از اوجگیری لازم، به راحتی سرعت خطّی خودش رو هم افزایش میده تا مسیر حرکتش برخاستش از یک خط صاف عمود به سطح ماه، به یه سهمی تبدیل شده و بعد با افزایش برد، سهمی رو تبدیل به یک دایرهی کامل کرده تا در مدار ماه قرار بگیره. علاوه بر فعّالیت موتور، RCS هم وظیفهی حفظ ثبات LM APS، چرخش و تغییر جهت رو به عهده داشت. حدود 3 ساعت بعد از برخاست از سطح ماه، LM APS توی مدار ماه با CSM ملاقات کرده و پهلوگیری (docking) انجام میشه.
پهلوگیری آزمایشی | مأموریت آپولو 9 | مدار زمین ||| تا اون تاریخ مسیر طولانیای طی شده بود و آزمایشهای بسیاری انجام شد تا آپولو 11 تبدیل به مأموریتی موفّقیّتآمیز بشه. این مأموریت، هرگز دستآوردی نبود که یک شبه حاصل بشه.
پهلوگیری آزمایشی | مأموریت آپولو 9 | مدار زمین ||| تا اون تاریخ مسیر طولانیای طی شده بود و آزمایشهای بسیاری انجام شد تا آپولو 11 تبدیل به مأموریتی موفّقیّتآمیز بشه. این مأموریت، هرگز دستآوردی نبود که یک شبه حاصل بشه.
بالاخره بعد از چند روز، آرمسترانگ و آلدرین به CSM بر میگردن و با کالینز ملاقات میکنن. امّا تکلیف LM APS چی میشه؟ طبیعتاً دیگه نیازی به اون نیست. بعد از انتقال فضانوردها و تمامی نمونههای جمعآوری شده از سطح ماه به CSM، دو ماژول رو جدا میکنن و LM APS برای همیشه توی مدار ماه رها میشه. به احتمال خیلی زیاد، هنوز هم جایی همونجا قرار داره و شاید هم روزی به عنوان یک اثر تاریخی، توسّط آیندگان بازیابی بشه. امّا LM APS مأموریتهای بعدی، سرنوشت جالبتری داشتن. LM APSهای مأموریتهای آپولو 12، 14، 15، 16 و 17، بعد از انتقال فضانوردها و نمونهها، با اندک باقیماندهی سوختشون عامدانه و به صورت کنترل از راه دور، deorbit و با سرعت زیادی به سطح ماه کوبیده شدن. با این کار، امواج شوک ناشی از برخورد شهابسنگوارشون، توسّط لرزهنگارهای حسّاسی که خود فضانوردها پیشتر روی سطح ماه قرار داده بودن ضبط میشدن و برای مطالعات ژئولوژی مورد استفاده قرار میگرفتن.
به بحث اصلی برگردیم. با بازگشت فضانوردها، CSM آمادهی بازگشت از مدار ماه به زمین هست. امّا اینبار دیگه نه مدار ثابتی از زمین، بلکه لازم هست CSM با زاویهی بستهای وارد اتمسفر زمین بشه تا مقاومت هوا، نقش ترمز رو ایفا کنه. با توجّه به این که ماه خودش توی مدار زمین هست، CSM با روشن کردن پیشران، مسیر خودش رو مطابق تصویر، طوری تغییر میده که سقوط آزادی به سمت زمین داشته باشه.
سرعت CSM موقع بازگشت به جو بسیار زیاد هست و از طرفی مناسب برای پرواز توی اتمسفر هم نیست که بتونه مثل شاتل، بعد از بازگشت به اتمسفر، توی اتمسفر پرواز کنه و مثل هواپیما فرود بیاد. البته نیازی هم نیست! مهم فقط بازگشت فضانوردها هست. بنابراین خود CSM هم به صورت دو مرحلهای طرّاحی شده.
ماژول فرماندهی (Command Module - CM): همون کپسول مخروطیشکل هست و شامل کابین فضانوردها میشه. همینطور درگاه پهلوگیری (Docking Port) که در نوک اون قرار داره و برای اتّصال با LM مورد استفاده قرار گرفت. ضمناً سپر حرارتیای هم تَه اون نصب شده.
ماژول سرویس (Service Module - SM): قسمت استوانهای که CM روی اون سوار میشه و شامل سوخت، اکسیدکننده و موتور پیشران هست.با نزدیک شدن به زمین و حدود 15 دقیقه پیش از ورود به اتمسفر، جداسازی بین CM و SM انجام میشه و بعد هردو وارد اتمسفر میشن. SM طبیعتاً بخاطر نداشتن سپر حرارتی، به سرعت توی اتمسفر سوخت و از بین رفت. امّا سپر حرارتی CM این اصطحکاک رو تحمّل میکنه و فضانوردها رو ایمن نگه میداره.
برنامهریزی از قبل طوری بوده که CM از محلّی وارد جو بشه که با کاهش سرعت بتونه توی محدودهی از قبل پیشبینیشدهای توی اقیانوس فرود بیاد. به هر حال با این که CM نه فرم آیرودینامیک داره و نه شباهتی به یه هواپیما داره همچنان به صورت محدودی میشه اون رو کنترل کرد. مطابق دو شکل زیر، زاویهی CM نسبت به مسیر پرواز، توی نیروی بالابرندهی ایجاد شده هم تأثیرگزار هست و میتونه پرواز CM رو طولانیتر و یا کوتاهتر کنه.
با کاهش سرعت به میزان کافی، نوبت چترنجاتها هست که باز بشن. ابتدا دو چتر ترمز باز میشن تا سرعت سقوط رو به تقریباً 200 کیلومتر در ساعت کاهش بدن. بعد از CM جدا میشن و سه چتر اصلی باز میشن تا سرعت رو به 35 کیلومتر در ساعت برسونن. سه چتر برای امنیت حداکثر بود؛ چرا که مثلاً توی مأموریت آپولو 15، یکی از چترهای اصلی به درستی باز نشد امّا همچنان CM تونست به سلامت فرود بیاد. محدودهی فرود که از قبل هم برنامهریزی شده بود، جایی وسط اقیانوس آرام بود. به کمک تعدادی بالشتک هوا، CM امکان شناور موندن روی آب رو داشت.
راه حل اینه که موشک رو چند قسمتی بکنن. هر قسمت موتور و سوخت مجزّای خودش رو داره. با استفادهی کاملِ سوخت هر قسمت، کلّ اون قسمت از موشک جدا میشه و قسمت بعدی شروع به کار میکنه. فضاپیمای آپولو 11 روی موشک غولپیکر ساترن پنج (Saturn V) سوار شد و توسّط این موشک چند مرحلهای به فضا رفت.
اوّلین مرحله از موشک ساترن 5 که غولپیکرترین قسمتش هم هست (با ارتفاع 42 متر و قطر 10 متر) رو توی تصویر بالا میتونید ببینید. پنج موتور F-1 همزمان با تمام توان کار میکنن تا کلّ موشک رو از زمین بلند کنن - امّا فقط برای 168 ثانیه!! 770هزار لیتر سوخت، توی همین مدّت کوتاه سوزونده میشه تا کلّ موشک رو بالا ببره و از اتمسفر خارج کنه. بعد از اون جدا میشه و بقایای اون توی اقیانوس سقوط میکنه.
تا این مرحله، موشک تقریباً از اتمسفر خارج شده و مقاومت هوا دیگه چندان روش تأثیری نداره. امّا هنوز راه زیادی (سرعت زیادی!) تا قرار گرفتن توی مدار زمین رو در پیش داره. مرحلهی دوّم (تصویر بالا) فعّال میشه. این بخش کوچکتر هست (25 متر ارتفاع) و از پنج موتور ضعیفتر J-2 بهره میبره. حتّی سوخت مورد استفادهاش هم به کلّی با مرحلهی قبل فرق داره. اصلاً شرکت سازندهاش هم با شرکت سازندهی قسمت قبلی فرق داره و دو پیمانکار کاملاً مستقل هستن. چون اینجا دیگه هم موشک سرعت زیادی گرفته به لطف مرحلهی قبل و هم با مقاومت هوا درگیری چندانی وجود نداره و سازوکار کاملاً متفاوت خواهد بود. این بخش هم برای 384ثانیه کار میکنه تا به موشک سرعت خطّی بده و اون رو آماده برای قرارگیری توی مدار زمین کنه (در حال حاضر مسیر پیش روی موشک، یه بیضی هست که اوجش رو محل فعلی موشک تشکیل میده ولی حضیضش پایینتر از سطح زمین هست! یعنی اگه موشک رو توی همین حالت رها کنن، دوباره به اتمسفر بر میگرده و جایی اون سمت سیّاره به زمین برخورد میکنه). بعد از اتمام سوخت، این مرحله هم رها میشه و باقیماندهی اون، سمت دیگهی سیّاره به زمین برخورد میکنه. لحظاتی بعد از جداسازی، مرحلهی سوّم شروع به کار میکنه.
گریز از بحث اصلی: از عنوان عکس بالا یه ممکنه پرسش کوچکی براتون پیش بیاد. مگه IV توی رومی برابر 4 نیست؟ پس چرا اسم مرحلهی سوّم رو گذاشتن S-IV؟ دلیلش اینه که Saturn V خودش زیرمجموعهای از خانوادهی موشکهای Saturn هست. یکی از طرحهای اوّلیهی قبل از Saturn V، موشک Saturn C (همراه زیرمجموعهی خودش) بود که بخش S-III براش طرّاحی شده بود. امّا بعد از اون S-IV و S-IVB طرّاحی و تولید شد و توی موشکهایی مثل Saturn IB به عنوان مرحلهی دوّم مورد استفاده قرار گرفت (مأموریت Apollo 7 به مقصد مدار پایینی زمین هم با همین موشک انجام گرفت). پس برای طرّاحی Saturn V هم تصمیم گرفتن طرحهای S-III رو رها کنن و بجاش S-IVB رو به عنوان مرحلهی سوّم این موشک استفاده کنن.
ادامهی بحث: مرحلهی سوّم کوچکتر بود (ارتفاع 17.8 متر) و فقط یک موتور J-2 داشت. این موتور، دوبار خاموش و روشن شد. بار اوّل درست بعد از جداسازی مرحلهی دوّم بود و با این هدف انجام شد که سرعت خطّی رو افزایش بده، ارتفاع حضیض افزایش بده و رسماً موشک رو توی مدار دایرهای شکلی دور زمین قرار بده. بعد از قرار گرفتن توی مدار پایینی زمین، موتور رو خاموش کردن و 1.5 دور چرخش دور زمین انجام شد. بعد از اون، موتور برای دوّمین بار توی جهت چرخش روشن شد تا سرعت خطّی رو افزایش بده و درست طبق چیزی که قبلاً توضیح داده شد، مدار به شکل بیضی در بیاد و ارتفاع نقطهی اوج افزایش پیدا کنه و با مدار ماه تداخل پیدا کنه. امّا از قبل طوری محاسبه و برنامهریزی شده بود که نقطهی اوج، جایی با مدار ماه تلاقی پیدا کنه که خود ماه هم تا زمان رسیدن موشک، اون اطراف حضور داشته باشه (نه این که اونطرف مدار باشه) به طوری که موشک توی میدان گرانشی ماه قرار بگیره (البته با ورود به میدان گرانشی ماه هم پروسههایی لازم هست دنبال بشه تا بجای برخورد با سطح ماه و یا گذر از کنار ماه، موشک توی مداری حول ماه قرار بگیره که بعداً بهش خواهیم پرداخت). این فرآیند به Trans-lunar Injection معروف هست و ترک زمین (Earth Departure) صورت میگیره.
برای ارسال فضاپیما/کاوشگر به سایر سیّارات هم از همین روش استفاده میشه؛ امّا Transfer Injection باید اونقدر قوی باشه که مدار موشک از دایره به سهمی تبدیل بشه و موشک کاملاً میدان گرانشی زمین رو ترک کنه و وارد فضای بین سیّارهای بشه ضمناً برنامهریزی هم طوری باشه که سهمی با مدار سیّارهی مورد نظر تداخل پیدا کنه و مهمتر از اون، خود سیّاره هم زمان رسیدن موشک به اون نقطه، اطراف اون نقطه باشه و موشک رو تحت تأثیر میدان گرانشی خودش قرار بده.
با اتمام سوخت مرحلهی سوّم، این مرحله هم از موشک جدا میشه. امّا دیگه مثل دو مرحلهی قبل خبری از بازگشت به زمین، ورود مجدّد به اتمسفر و سوختن نیست! مدار این قسمت به همون شکلی هست که این قسمت براش استفاده شد: یه بیضی بزرگ که حضیضش با مدار پایینی زمین تداخل داره و اوجش هم بالاتر از مدار ماه. بخش سوّم موشک یا همون S-IVB، بعد از استفاده و جداسازی، به سمت ورای مدار ماه حرکت کرد و با کمک کشش گرانشی ماه، وارد فضای بین سیّارهای شد. همین الآن هم جایی توی منظومهی شمسی داره حول خورشید میچرخه.
گریز از بحث اصلی: S-IVB آپولو 13 به سطح ماه برخورد کرد و از بین رفت. البته هرگز اوّلین زبالهی بشر روی سطح ماه به حساب نمیاد. همونطور که گفته شد پیش از آپولو 11 - درواقع از یک دهه قبل از اون - هم آمریکا و هم شوروی کاوشگرهای بدون سرنشین مختلفی رو به ماه فرستاده بودن. برخی از اونها به عنوان ماهواره/مدارگرد توی مدار ماه قرار گرفتن؛ برخی عامدانه و بدون کاهش سرعت به سطح ماه کوبیده شدن و تونستن قبل از نابود شدن، تصاویر و دادههایی از ماه مخابره کنن؛ برخی هم با کاهش سرعت، به نرمی و به صورت کنترل شده روی سطح ماه فرود اومدن و اوّلین تصاویر رو از سطح ماه مخابره کردن.
امّا اصل کار، محمولهای بود که توی تصویر بالا میبینید و مراحل S-IC و S-II و S-IVB همگی استفاده شدن فقط برای این که محمولهی بالا - که مهمترین محتویاتش هم خودِ سرنشینها هستن! - رو به سمت ماه پرت کنن. تازه فقط 25% مأموریت انجام شده و هنوز مراحل زیادی باقی مونده برای انجام یه فرود سرنشیندار به سطح ماه و بازگشت به زمین. توی قسمت چهارم از مکانیک فضایی به زبان ساده، خواهیم پرداخت به محتویات این محموله که داره با سرعت زیادی به سمت ماه حرکت میکنه و مراحل آتی مأموریت، شرح داده میشن.
اوّل از همه به راکت کوچکی که بالای این محموله و در حقیقت نوک موشک نصب شده توجّه کنید. این راکت که از سوخت جامد بهره میبره، برای مواقع اضطراری تعبیه شده. این برجک که به سیستم فرار از پرتاب (Launch Escape System) معروف هست، مستقیماً به قسمتی که سرنشینها داخلش قرار دارن متّصل شده و در صورت بروز حادثه توی مراحل اوّلیهی پرتاب موشک، این سیستم رو فعّال میکنن تا ضمن جدا کردن قسمت سرنشینها از موشک، اون رو به کمک شتاب شدیدی که این راکت کوچک برای چند لحظه تولید میکنه از بقیهی موشک دور کنه. درست شبیه صندلی ایجکتی که توی هواپیماهای نظامی تعبیه میشه؛ با این تفاوت که بجای پرتاب کردن سرنشینها به بیرون از کابین، کلّ کابین جدا و پرتاب میشه تا بعد به کمک چتر نجات فرود بیاد.
طبیعتاً زمانی که موشک توی مدار زمین قرار بگیره، این سیستم دیگه هیچ کاربردی نخواهد داشت و حتّی درصورت بروز حادثه هم نمیتونه کمکی به نجات فضانوردها بکنه. بنابراین دقایقی بعد از پرتاب از موشک جدا میشه.
امّا چیزی که برجک نجاتِ یادشده بهش متّصل شده بود و وظیفهی نجات اون در صورت بروزحادثه رو داشت، مهمترین قسمت موشک هست؛ یعنی ماژول فرماندهی (Command Module یا به اختصار، CM) و با اسم مستعار "Columbia". کپسولی حامل سه فضانورد و پنل کنترل. در قسمت بالایی این کپسول مخروطیشکل، docking portـی تعبیه شده که امکان پهلوگیری و اتّصال کپسول توی فضا رو فراهم میسازه. همینطور مجهّز هست به تجهیزات دیگهای مثل چتر نجات، سپر حرارتی و... که جلوتر به اونها خواهیم پرداخت.
ماژول فرماندهی خودش به بخش دیگهای موسوم به ماژول سرویس (Service Module یا به اختصار، SM) متّصل میشه؛ شامل یک موتور اصلی، سوخت و اکسیدکننده، تجهیزات ارتباطی و سیستمهایی برای چرخش و حرکات جزئی توی فضا که برای فرآیند Docking حیاتی هست.
درست زیر این قسمت، ماژول مجزّایی قرار گرفته، موسم به ماژول فرود (Landing Module یا به اختصار، LM) و با اسم مستعار "Eagle". در ابتدا قرار بود فضاپیمای آپولو به گونهای طرّاحی بشه که کلّ فضاپیما شامل هر سه فضانورد روی سطح ماه فرود بیاد و بعد از اتمام مأموریت، مجدّداً از سطح ماه بلند بشه و به زمین برگرده. امّا مشکلی وجود داشت: سوخت مورد نیاز برای چنین کاری اونقدر زیاد بود اساساً موشک دیگه نمیتونست بعد از فرود روی سطح ماه، مجدّداً بلند بشه! پس بجای این کار، تصمیم دیگهای گرفته شد. ماژولهای فرماندهی و سرویس (CSM) به همون شکلی که بالاتر توضیح داده شد طرّاحی شد که وظیفه داره توی مدار ماه قرار بگیره. در عوض یک ماژول مجزّای دیگه یعنی همون ماژول فرود، روی سطح ماه فرود میاد و بعد از اتمام مأموریت، مجدّداً از سطح ماه بلند میشه، خودش رو به مدار میرسونه تا به CSM پهلوگیری کنه. بالای این قسمت هم docking portـی تعبیه شده که امکان پهلوگیری CSM رو فراهم کنه. در ادامه بیشتر راجع بهش توضیح داده میشه.
برگردیم به سناریوی اصلی. محمولهای شامل CSM و محفظهی باری شامل LM رو داریم قسمت سوّم موشک ساترن 5 یعنی S-IVB هم به انتهای اون متّصل هست و همگی توی مسیری به سمت ماه قرار گرفتن. اینجا فرآیند مهمّی کلید میخوره. درست مثل تصویر زیر، ابتدا دیوارههای محفظهی بار جدا میشن. بعد از اون، CSM چرخشی صد و هشتاد درجهای میکنه و آروم آروم به LM که توی محفظهی بار قرار گرفته نزدیک میشه تا به اون پهلوگیری کنه. بعد از پهلوگیری، LM رو از قسمت بار جدا میکنه.
مجموعه همچنان با سرعت زیادی (که به لطف سه بخش موشک Saturn V ایجاد شده) به سمت ماه در حال حرکت هست. امّا با این سرعت و توی این مسیر، سرانجامی جز برخوردی شهابسنگوار به سطح ماه نخواهد داشت! بنابراین با نزدیک شدن به ماه، موتور نصب شده روی SM فعّال شد تا سرعت رو کاهش بده و مسیر رو تصیح کنه تا CSM به همراه LM که بهش متّصل شده، توی مدار ماه قرار بگیرن - درست طبق چیزی که توی قسمت دوّم از سری مکانیک فضایی توضیح داده شد.
امّا بریم داخل فضاپیما. سه سرنشین آپولو 11 توی CM حضور داشتن: نیل آرمسترانگ (فرمانده)، باز آلدرین (خلبان LM) و مایکل کالینز (خلبان CM) بودن. هرسه، تخصّصهای خودشون رو داشتن و پیشتر هم سفرهای فضایی رو تجربه کرده بودن و اوّلینباری نبود که عازم فضا میشدن. مأموریت به این صورت برنامهریزی شده بود که مایکل کالینز تمام مدّت توی CM بمونه و هدایت اون رو به عهده داشته باشه؛ در حالی که باز آلدرین و نیل آرمسترانگ وارد LM میشن تا به سطح ماه فرود بیان.
برای فرود به سطح ماه، منطقهای موسوم به «دریاوارهی آسایش - Mare Tranquillitatis» به عنوان گزینهی شمارهی یک انتخاب شده بود. چهار سال قبل، کاوشگر Ranger 8 داخل همین منطقه سقوط عامدانه کرده بود و پیش از برخورد، هزاران عکس به زمین مخابره کرده بود. همینطور دو سال بعد از Ranger 8 هم کاوشگر سطحنشین Surveyor 5 توی این منطقه فرود اومده بود. تحلیل دادههای هر دو کاوشگر و نقشهبرداریهایی که از سطح ماه انجام شده بود، گویای این بود که این منطقه سطح نسبتاً صاف و مناسبی برای فرود داره و همینطور از نظر ژئولوژی هم مکان مناسب و غنیای برای تحقیق و اکتشاف هست.
بعد از انتقال آرمسترانگ و آلدرین از CM به LM و رسیدن به موقعیت مناسب، دو ماژول از هم جدا شدن و LM موتورش رو درست خلاف مسیر چرخش توی مدار روشن کرد تا با کاهش سرعت خطّی، نقطهی حضیض مداری رو به ماه نزدیک و نزدیکتر بکنه؛ تا جایی که مسیر حرکت LM از دایرهای به دور ماه، به سهمیای تبدیل بشه که به سطح ماه میرسه (توی قسمت دوّم این سری راجع بهش بحث شد). به این ترتیب، کالینز تنها توی CM و توی مدار ماه باقی میمونه و آرمسترانگ و آلدرین، داخل LM وارد مرحلهی فرود به سطح ماه میشن.
ماژول فرود خودش از دو قسمت تشکیل شده. همونطوری که توی تصویر میبینید، قسمت پایینی شامل موتوری هست که دو بار مورد استفاده قرار گرفت: یک بار برای کاهش سرعت خطّی توی مدار و قرار گرفتن توی مسیر فرود و یک بار هم برای کاهش سرعت قبل از فرود تا فرود به نرمی و آرامی روی سطح ماه انجام بشه. چهار پایهی ظریف قابل جمع شدن، LM رو روی سطح ماه نگه میدارن. محفظهی باری هم توی همین قسمت تعبیه شده که شامل خودروی ماهنورد و تجهیزات علمی میشه. امّا قسمت دیگهی LM، کابین سرنشینها رو تشکیل میده. این قسمت دارای موتور و سوختی مجزّا هست که از قسمت پایینی جدا میشه و برای برخاستن از سطح ماه مورد استفاده قرار میگیره.
با قرار گرفتن LM توی مسیر کاهش ارتفاع، یکی از حسّاسترین و مخاطرهآمیزترین مراحل این مأموریت آغاز میشه: فرود. با فعّالسازی موتور انتهایی LM، سرعت رو به گونهای کاهش میدن که پیش از اتمام سوخت، LM به سطح ماه برسه و به آرامی روی سطح فرود بیاد. استفادهی بیش از حد از موتور باعث اتمام زودتر از موعد سوخت میشه و استفادهی کمتر از حد از موتور هم نمیتونه سرعت رو به حدّی کاهش بده که فرود امنی اتّفاق بیفته. هر خطایی میتونه منجر به برخورد سخت LM به سطح ماه بشه که توی محتملترین حالت موجب مرگ آنی آرمسترانگ و آلدرین میشه و توی بهترین حالت هم اونقدر به LM آسیب میزنه که امکان برخاست مجدّد از سطح ماه ازش سلب میشه و در هر دو صورت، کالینز ناچار به ترک اجساد همقطارانش (همفضاپیمایانش!) روی سطح ماه و بازگشت تنها به زمین خواهد شد. امّا به لطف مهندسی بینظیری که حاصل دسترنج هزاران متخصص و پیمانکار بود، این اتّفاق رخ نمیده و پایههای LM به نرمی سطح ماه رو لمس میکنن. اوّلین فرود سرنشیندار بشر روی ماه!
، LM خودش متشکل از دو قسمت بود:
بخش فرود (Descent Stage): شامل پایههایی برای فرود به سطح ماه، موتور، سوخت و اکسیدکنندهی لازم برای deorbit شدن از مدار ماه و فرودی کنترل شده به سطح ماه و همینطور محفظهای برای جاسازی تجهیزاتی که روی سطح ماه مورد استفاده قرار گرفتن. علاوه بر اون، این بخش به عنوان سکّوی پرتاب بخش بعدی برای برخاست مجدّد از سطح ماه و رسیدن به مدار هم استفاده میشد.
بخش صعود (Ascent Stage): شامل تجهیزات ارتباطی، کابین خدمه و تجهیزات کنترلی، موتور و سوخت جداگانه برای برخاست مجدّد از سطح ماه، رسیدن به مدار و ملاقات با CSM؛ و همینطور سیستم کنترل واکنش (Reaction Control System - RCS) جهت پایداری و کنترل ماژول برای پهلوگیری و اتّصال به CSM.
با اتمام مأموریت و کامل کردن برنامههایی که برای روی سطح ماه در نظر گرفته شده بود، آرمسترانگ و آلدرین برای آخرینبار به LM بر میگردن. برخلاف فرود که جز نمای دوربینهای داخلی LM، تصویری ازش موجود نیست، صحنهی صعود توسّط دوربینهایی که خود خدمه روی سطح ماه کار گذاشته بودن به تصویر کشیده میشه. بخش صعود، طی یه نیروی انفجاری از بخش فرود جدا و به بالا پرتاب شده و همزمان موتور هم برای فعّال میشه.
برخاست از سطح ماه و قرارگیری در مدار، بسیار سادهتر از زمین هست. علاوه بر گرانش کمتر که هم به پیشران کمتری جهت اوجگیری نیاز داشته و هم سرعت خطّی کمتری جهت قرارگیری در یک مدار پایدار نیاز داره، عدم وجود اتمسفر هم موجب نبود مقاومت هوا میشه. به همین خاطر، بخش صعود LM (یا به اختصار، LM APS)، بدون دشواری چندانی از سطح ماه بلند شده و بعد از اوجگیری لازم، به راحتی سرعت خطّی خودش رو هم افزایش میده تا مسیر حرکتش برخاستش از یک خط صاف عمود به سطح ماه، به یه سهمی تبدیل شده و بعد با افزایش برد، سهمی رو تبدیل به یک دایرهی کامل کرده تا در مدار ماه قرار بگیره. علاوه بر فعّالیت موتور، RCS هم وظیفهی حفظ ثبات LM APS، چرخش و تغییر جهت رو به عهده داشت. حدود 3 ساعت بعد از برخاست از سطح ماه، LM APS توی مدار ماه با CSM ملاقات کرده و پهلوگیری (docking) انجام میشه.
پهلوگیری آزمایشی | مأموریت آپولو 9 | مدار زمین ||| تا اون تاریخ مسیر طولانیای طی شده بود و آزمایشهای بسیاری انجام شد تا آپولو 11 تبدیل به مأموریتی موفّقیّتآمیز بشه. این مأموریت، هرگز دستآوردی نبود که یک شبه حاصل بشه.
پهلوگیری آزمایشی | مأموریت آپولو 9 | مدار زمین ||| تا اون تاریخ مسیر طولانیای طی شده بود و آزمایشهای بسیاری انجام شد تا آپولو 11 تبدیل به مأموریتی موفّقیّتآمیز بشه. این مأموریت، هرگز دستآوردی نبود که یک شبه حاصل بشه.
بالاخره بعد از چند روز، آرمسترانگ و آلدرین به CSM بر میگردن و با کالینز ملاقات میکنن. امّا تکلیف LM APS چی میشه؟ طبیعتاً دیگه نیازی به اون نیست. بعد از انتقال فضانوردها و تمامی نمونههای جمعآوری شده از سطح ماه به CSM، دو ماژول رو جدا میکنن و LM APS برای همیشه توی مدار ماه رها میشه. به احتمال خیلی زیاد، هنوز هم جایی همونجا قرار داره و شاید هم روزی به عنوان یک اثر تاریخی، توسّط آیندگان بازیابی بشه. امّا LM APS مأموریتهای بعدی، سرنوشت جالبتری داشتن. LM APSهای مأموریتهای آپولو 12، 14، 15، 16 و 17، بعد از انتقال فضانوردها و نمونهها، با اندک باقیماندهی سوختشون عامدانه و به صورت کنترل از راه دور، deorbit و با سرعت زیادی به سطح ماه کوبیده شدن. با این کار، امواج شوک ناشی از برخورد شهابسنگوارشون، توسّط لرزهنگارهای حسّاسی که خود فضانوردها پیشتر روی سطح ماه قرار داده بودن ضبط میشدن و برای مطالعات ژئولوژی مورد استفاده قرار میگرفتن.
به بحث اصلی برگردیم. با بازگشت فضانوردها، CSM آمادهی بازگشت از مدار ماه به زمین هست. امّا اینبار دیگه نه مدار ثابتی از زمین، بلکه لازم هست CSM با زاویهی بستهای وارد اتمسفر زمین بشه تا مقاومت هوا، نقش ترمز رو ایفا کنه. با توجّه به این که ماه خودش توی مدار زمین هست، CSM با روشن کردن پیشران، مسیر خودش رو مطابق تصویر، طوری تغییر میده که سقوط آزادی به سمت زمین داشته باشه.
سرعت CSM موقع بازگشت به جو بسیار زیاد هست و از طرفی مناسب برای پرواز توی اتمسفر هم نیست که بتونه مثل شاتل، بعد از بازگشت به اتمسفر، توی اتمسفر پرواز کنه و مثل هواپیما فرود بیاد. البته نیازی هم نیست! مهم فقط بازگشت فضانوردها هست. بنابراین خود CSM هم به صورت دو مرحلهای طرّاحی شده.
ماژول فرماندهی (Command Module - CM): همون کپسول مخروطیشکل هست و شامل کابین فضانوردها میشه. همینطور درگاه پهلوگیری (Docking Port) که در نوک اون قرار داره و برای اتّصال با LM مورد استفاده قرار گرفت. ضمناً سپر حرارتیای هم تَه اون نصب شده.
ماژول سرویس (Service Module - SM): قسمت استوانهای که CM روی اون سوار میشه و شامل سوخت، اکسیدکننده و موتور پیشران هست.با نزدیک شدن به زمین و حدود 15 دقیقه پیش از ورود به اتمسفر، جداسازی بین CM و SM انجام میشه و بعد هردو وارد اتمسفر میشن. SM طبیعتاً بخاطر نداشتن سپر حرارتی، به سرعت توی اتمسفر سوخت و از بین رفت. امّا سپر حرارتی CM این اصطحکاک رو تحمّل میکنه و فضانوردها رو ایمن نگه میداره.
برنامهریزی از قبل طوری بوده که CM از محلّی وارد جو بشه که با کاهش سرعت بتونه توی محدودهی از قبل پیشبینیشدهای توی اقیانوس فرود بیاد. به هر حال با این که CM نه فرم آیرودینامیک داره و نه شباهتی به یه هواپیما داره همچنان به صورت محدودی میشه اون رو کنترل کرد. مطابق دو شکل زیر، زاویهی CM نسبت به مسیر پرواز، توی نیروی بالابرندهی ایجاد شده هم تأثیرگزار هست و میتونه پرواز CM رو طولانیتر و یا کوتاهتر کنه.
با کاهش سرعت به میزان کافی، نوبت چترنجاتها هست که باز بشن. ابتدا دو چتر ترمز باز میشن تا سرعت سقوط رو به تقریباً 200 کیلومتر در ساعت کاهش بدن. بعد از CM جدا میشن و سه چتر اصلی باز میشن تا سرعت رو به 35 کیلومتر در ساعت برسونن. سه چتر برای امنیت حداکثر بود؛ چرا که مثلاً توی مأموریت آپولو 15، یکی از چترهای اصلی به درستی باز نشد امّا همچنان CM تونست به سلامت فرود بیاد. محدودهی فرود که از قبل هم برنامهریزی شده بود، جایی وسط اقیانوس آرام بود. به کمک تعدادی بالشتک هوا، CM امکان شناور موندن روی آب رو داشت.
-
rohamavation
نام: roham hesami radرهام حسامی راد
محل اقامت: 100 مایلی شمال لندن جاده آیلستون، لستر، لسترشر. LE2
عضویت : سهشنبه ۱۳۹۹/۸/۲۰ - ۰۸:۳۴
پست: 3278-
سپاس: 5494
- جنسیت:
تماس:
Re: هوافضا
ابتدا لانچر چیست ه این نوع سکوهای پرتاب، اصطلاحا Fixed Launcher می گویند.سکوهای پرتاب ثابت (سکوهای پرتاب غیر متحرک) به سکوهایی می گویند که سازه آن به صورت ثابت (fixed) در یک مکان از پیش تعیین شده ساخته شده است و جابجایی بسیار دشواری دارد.
سکوهای پرتاب زیر زمینی (Underground Missile Launchers) که داخل تاسیسات زیر زمینی موشکی (UMF) می باشند نیز از نوع سکوهای پرتاب غیر متحرک می باشند.
لانچر رگباری :
به این تایپ قدیمی و پراستفاده از سکوهای پرتاب موشکی، اصطلاحا Multiple Launcher می گویند.این سکوهای موشکی، بسته به نوع مهندسی آن ها، می توانند تعداد قابل توجهی موشک به سمت هدف (اهداف) شلیک کنند
لانچر توپ :
این نوع لانچر نیز سابقه ی بسیار قدیمی دارد و اکنون نسل تکامل یافته ی آن را با نام هویتزر (Howitzer) می شناسیم که هزینه ی تولید انبوه و استفاده ی آن نسبت به سایر لانچر های موشکی و همچنین سامانه های موشکی (Missile Systems) کمتر است و به همین دلیل برای حملات سنگین علیه دشمن، از این تایپ لانچر بیشتر از سایر تایپ ها استفاده می شود.
به لانچر توپ اصطلاحا Gun Launcher می گویند.
لانچر متحرک :
Mobile Launcher یا همان سکوی پرتاب متحرک موشکی تایپی از لانچرهای مباشد
لانچر تک ریلی :
به این نوع لانچر اصطلاحا Mono-rail Launcher گفته می شود که به دو دسته ی لانچر ثابت (Fixed launcher) و (Mobile launcher) تقسیم می شوند.هر واحد لانچر تک ریلی می تواند صرفا یک فروند موشک شلیک کند.
لانچر پرتابل :
به سکوهای پرتاب سبک و قابل حمل اصطلاحا Portable Launcher یا لانچر پرتابل (پرتیبل) می گویند.
این نوع لانچر به طور گسترده به منظور استفاده در سامانه های موشکی ضد زره (AAeMS) و سامانه های موشکی ضد هوایی (SAM Systems) از نوع دوشپرتاب طراحی و تولید شده است.
لانچر پرتابل در انواع مختلفی ساخته شده است و تهدید بزرگی برای هواپیماهای پشتیبان زمینی (ground support)، پهپادها و مخصوصا بالگردها به شمار می آید
بدلیل استفاده ی آسان این لانچر نسبت به سایر تایپ های لانچرها، فراوانی تولید، قیمت کمتر و قابل حمل بودن آن، یکی از خطرناکترین سلاح ها به شمار می آید، زیرا یک فرد می تواند با مسلح کردن این لانچر به موشک آن، حتی از داخل یک ساختمان نیز یک هواپیما و یا یک بالگرد را نابود سازد و یا بار نوع راکت انداز آن، یک وسیله ی نقلیه ی زره ای را منهدم کند.
لانچر هوایی :
به سکوهای نصب شده ی زیر هواپیمای نظامی به منظور پرتاب موشک های غیر هدایت شونده و یا موشک های مجهز به سیستم هدایتی، اصطلاحا Post Aircraft Rocket Launcher می گویند.
لانچر چهارگانه :
به سکوهای پرتاب موشکی ای که قابلیت پرتاب همزمان 4 فروند موشک به سمت هدف را دارند، لانچرهای چهارگانه (لانچرهای چهارتایی) یا Quadruple Launcher می گویند.
لانچر جمع شونده :
به سکوهای موشکی ای که توانایی باز و جمع شدن را داشته باشند، لانچرهای جمع شونده یا Retractable Launchers می گویند.بیشترین کاربرد این نوع لانچرها در نیروی دریایی می باشد.سامانه های سام موجود بر روی رزم ناو ها عموما از نوع لانچرهای retractable می باشند.
لانچر سرپوشیده :
سکوی پرتاب سرپوشیده یا به اصطلاح Shoe Launcher می تواند بسیاری از تایپ های ذکر شده در موارد بالا و پایین باشد.
در کل به سکوی پرتابی که قبل و بعد از پرتاب موشک از دید هواپیماها و سیستم های اطلاعاتی بدون سرنشین (URAS و URAV) و همچنین ماهواره ها (Satellites) ی جاسوسی پنهان شده باشد (یا به اصطلاح استتار کرده باشد) را shoe launcher می گوییم.
لانچر برجی :
به لانچری که دارای برج می باشد اصطلاحا Tower Launcher می گویند.
کاربرد گسترده ی این نوع سکوی پرتاب در پرتاب 90 درجه ی موشک های بالستیک می باشد.
به عبارت دیگر ، در زمینه نظامی ، موشک یک سلاح هدایت شونده بدون موشک و بدون قابلیت فرمان پذیری است. موشک یک سلاح خودران است ، اغلب موشک دار (اما نه همیشه) ، که دارای نوعی سیستم هدایت است تا بتواند در پرواز به سمت هدف خود حرکت کند.
موشک ها از موتور استفاده می کنند ، عموماً یک نوع موتور موشک یا موتور جت. ... این مراحل ممکن است همه از انواع مشابه باشند یا ممکن است ترکیبی از انواع موتور را شامل شوند-به عنوان مثال ، موشک های کروز پرتاب سطحی اغلب دارای تقویت کننده موشک برای پرتاب و موتور جت برای پرواز مداوم هستند. در سیستم موشکی و موشکی: اصول طراحی شوروی پیشگام روش "پرتاب سرد" بود ، که در آن موشک با گاز بیرون رانده می شود و موتور موشک پس از پاکسازی موشک از سیلو مشتعل می شود. این روش ، اساساً همان سیستم مورد استفاده در SLBM ها ، امکان استفاده مجدد از سیلوها را پس از تعمیر جزئی فراهم می کند.پرتاب موشک به آسانی فشار دادن دکمه قرمز نیست. برای اطمینان از شلیک ایمن به مهندسی و علم زیادی نیاز است. در این مقاله سعی می کنیم روش های شلیک از سیستم های پرتاب عمودی (VLS) را توضیح دهیم. VLS از دو روش مختلف برای شلیک استفاده می کند.یک سیستم پرتاب عمودی می تواند پرتاب داغ باشد ، جایی که موشک در سلول مشتعل می شود ، یا پرتاب سرد ، جایی که موشک با گاز تولید شده توسط ژنراتور گازی که بخشی از خود موشک نیست خارج می شود و سپس موشک مشتعل می شود. "سرد" در مقایسه با اگزوز موتور موشک نسبتاً سرد است.موشک وسیله ای است که از موتور موشک برای حرکت خود در سرعت های بالا استفاده می کند. موشک ها معمولاً موشک هایی هستند که هدایت می شوند و حاوی نوعی مواد منفجره هستند. در روزهای اولیه برنامه فضایی ایالات متحده ، مهندسان از موشک های نظامی استفاده کردند تا کپسول های فضایی حاوی فضانوردان را حمل کنند
زمان پرتاب سریع موشک ها بسیار سریعتر است زیرا موشک از کشتی تقریباً بلافاصله پس از روشن شدن موتور از کشتی خارج می شود ، در حالی که با سیستم پرتاب سرد ، موشک ابتدا باید از سلول پرتاب خارج و سپس مشتعل شود ، بنابراین زمان پرتاب افزایش می یابد. به
یک سیستم پرتاب عمودی می تواند پرتاب داغ باشد ، جایی که موشک در سلول مشتعل می شود ، یا پرتاب سرد ، جایی که موشک با گاز تولید شده توسط ژنراتور گازی که بخشی از خود موشک نیست خارج می شود و سپس موشک مشتعل می شود. "سرد" در مقایسه با اگزوز موتور موشک نسبتاً سرد است. یک سیستم پرتاب گرم نیازی به مکانیزم پرتاب ندارد ، اما به طریقی برای دفع اگزوز و گرمای موشک هنگام خروج از سلول نیاز دارد. اگر موشک در یک سلول بدون مکانیزم پرتاب مشتعل شود ، سلول باید در برابر حرارت فوق العاده ای که ایجاد می کند بدون احتراق موشک ها در سلول های مجاور مقاومت کندRocket launcher silo
در روش شلیک گرم موشک در سلول روشن میشود و توسط نیروی پیشرانه خود به سمت بالا حرکت میکند.
در روش شلیک سرد موشک توسط نیروی گازی که توسط یک ژنراتور گاز تولید میشود به سمت بالا شلیک شده و پس از طی مسافتی به صورت عمودی و دور شدن از شناور روشن میشود. ژنراتور گاز بخشی از سیستم موشک انداز بوده و مجزا از خود موشک میباشد. واژه «سرد» به دلیل دمای پایین اگزوز راکت در مقایسه با روش قبلی به کار میرود.
یک سیستم شلیک گرم نیاز به یک مکانیسم پرتابگر اولیه ندارد ولی در عوض نیاز به روشهایی برای خنثی کردن گازها و گرمای حاصله از اگزوز موشک در هنگام ترک سلول میباشد. اگر موشک بدون مکانیسم پرتابگر اولیه و به روش گرم شلیک شود، آنگاه سلول پرتابگر باید در برابر گرمای عظیمی که توسط موشک تولید میشود به خوبی مقاوم باشد تا مانع از انتقال گرما به سلولهای مجاور و انفجار موشکهای آنها بشود.
مزیت روش شلیک گرم این است که موشک با نیروی خودش سلول شلیککننده را ترک میکند و در نتیجه نیاز به یک سیستم جداگانه و اضافه برای پرتاب موشک از لوله شلیککننده نمیباشد. این ویژگی باعث میشود تا سیستمهای شلیک گرم بتوانند سادهتر، کم حجم تر و اقتصادی تر طراحی و توسعه داده شوند و بخصوص در کاربردهایی که از موشکهای کوچکتر استفاده میکنند بسیار مقرون به صرفه باشند. عیب اصلی این سیستمها این است که اگر موشک در هنگام پرتاب دچار نقص فنی و خرابی شود، میتواند لوله موشک انداز را نابود کند.
شلیک گرم یک موشک تاماهاک از یک سیستم موشک انداز عمودی Mark 41 متعلق به نیروی دریایی ایالات متحده
مزیت سیستم شلیک سرد ایمنی آن است. اگر یک موشک در هنگام پرتاب دچار نقص فنی شود، سیستم شلیک سرد میتواند آن را با استفاده از نیروی گاز به بیرون پرتاب کند که باعث کاهش یا حذف خطر میشود. برای این منظور سیستمهای موشک انداز عمودی روسی اغلب دارای یک شیب زاویه ای هستند که باعث میشود موشک کاملاً عمودی به طرف بالا حرکت نکند و زاویه داشته باشد. این ویژگی کمک میکند که در صورتی که موشک از کار بیفتد به جای اینکه عمودی و مستقیم به بالا برود و بعد در جهت معکوس به روی عرشه کشتی برگردد، به دلیل زاویه پرتاب به درون آب سقوط کند.
هر چه اندازه موشک بزرگتر شود، مزیت استفتده از سیستم پرتابگر اولیه (شلیک سرد) هم افزایش مییابد. از اندازه معینی به بالاتر ،موتور پیشرانه موشک نمیتواند بدون خطر احتمال صدمه زدن به بدنه کشتی روشن شود. اکثر موشکهای بالستیک قارهپیما و موشکهای بالستیک زیر دریایی مدرن از روش شلیک سرد استفاده میکنند.
سیستمهای موشک انداز عمودی شناورهای سطحی آمریکایی از سلولهای موشکی استفاده میکنند که به صورت مشبک در کنار هم قرار گرفتهاند و هر سلول قابلیت نگهداری یک موشک را دارد که و همچنین دارای سیستم شلیک گرم هستند، بنابراین هر سلول باید دارای لوله اگزوزی جهت تخلیه شعله و گازهای خروجی موشک باشد. فرانسه، ایتالیا و بریتانیا دارای سیستمهای سیلور هستند که در سیستم دفاع موشکی ضدهوایی اصلی (مخفف انگلیسی: PAAMS) به کار میروند و سیستمهای شلیک گرم مشابه با سیستمهای آمریکایی هستند. روسیه هم یک سیستم مشبک با یک موشک در هر سلول و هم یک سیستم ششلولی چرخان با بیش از یک موشک در هر سلول پرتابگر تولید میکند که هر دو سیستمهای شلیک گرم هستند. روسیه همچنین در بعضی از سیستمهای موشک انداز عمودی خود مثل سیستم موشکی تور از سیستم شلیک سرد استفاده میکند. جمهوری خلق چین در ناوشکن Type 052C از یک سیستم شلیک سرد دایره ای شکل استفاده میکند که موشک را از لوله موشک انداز به بیرون پرتاب میکند و همچنین در ناوچه Type 054A از سیستم شلیک گرم مستطیل شکل با یک موشک در هر سلول و به صورت مشبک بهره میبرد. پرتاب سرد به علت استارت موتور اصلی در خارج از VLS به علت کاهش فشار شدید بر روی سازه پرتابگر باعث افزایش عمر عملیاتی و دوره بازبینی آن خواهد شد.از مزایای دیگر این نوع پرتاب میتوان به کم بودن محدودیت نسبت به سایز موشک داخل کنیستر است که میتوان تا جای ممکن قطر موشک و سایز موتور و نازل موتور را بزرگ طراحی کرد ولی این موارد به شدت در سیستم های پرتاب گرم با اهمیت و دارای طراحی های کنترل شده بیشتر میباشد.همچنین در این پرتابگر ها نیاز به فضایی در مابین پرتابگر ها به منظور خروج گازهای داغ نیست و این موضوع باعث کوچکتر شدن فضای کلی سامانه VLS در عرشه میشود.پس به صورت کلی از این نوع پرتابگر ها میتوان موشک های بزرگتری را پرتاب کرد.اما با تمام این مسائل مواردی است که از نظر تکنیکی باعث افزایش ریسک استفاده از پرتاب سرد میشود به طور مثال امکان مشتعل نشدن موتور اصلی موشک پس از خروج از کنیستر است.در این صورت پس از باز گشت موشک بر روی عرشه احتمال بروز فاجعه حتمی استیک اشکال جزئی دیگری نیز به روش پرتاب سرد وارد است و آن هم افزایش زمان درگیری است و با خروج موشک از لانچر و استارت موتور اصلی وسپس افزایش شتاب در کل باعث افزایش زمان رسیدن موشک به هدف میشود در صورتی که در پرتاب گرم افزایش شتاب موشک از داخل پرتابگر آغاز میشود.موضوع زمان درگیری در انتها باعث تاثیر در انرژی جنبشی پرتابه خواهد شد واین موضوع یک اولویت اساسی برای موشک های بدون سرجنگی است و موشک برای انهدام هدف متکی به انرژی جنبشی کسب کرده در طی مسیر پرواز است.همچنین پرتاب گرم در سیستم های درگیری نزدیک و برد میانی بسیار مهم است زیرا با توجه به سرعت پرتابه نزدیک شونده دشمن.زمان مقابله به مثل به یک شاه کلید برای دفاع تبدیل میشود به گونه ای که هرچقدر سریع تر موشک خودی درگیر شود احتمال موفقیت افزایش خواهد یافت.به طور کلی پرتابگر های گرم از قابل اعتماد ترین سیستم ها هستند و حتی در صورت عمل نکردن موتور موشک نه احتمال بروز فاجعه ای است و نه حتی موشک از دست میرود و به سادگی در داخل کنیستر باقی خواهد ماند.;کینستر موشک
را از ورود مواد خارجی ، ارتعاشات ضربه ای و آب و هوایی مانند باران و برف محافظت می کند و پرتاب صاف را هنگام پرتاب تسهیل می کند. . پیشگام روش "پرتاب سرد" بود ، که در آن موشک با گاز بیرون رانده می شود و موتور موشک پس از پاکسازی موشک از سیلو مشتعل می شود. این روش ، اساساً همان سیستم مورد استفاده در SLBM ها ، امکان استفاده مجدد از سیلوها را پس از تعمیر جزئی فراهم می کند.
مزیت یک سیستم پرتاب داغ این است که موشک با استفاده از موتور خود از سلول پرتاب خارج می شود و این امر نیازی به سیستم جداگانه ای برای پرتاب موشک از لوله پرتاب کننده ندارد. این امر به طور بالقوه باعث توسعه و تولید یک سیستم پرتاب گرم نسبتاً سبک ، کوچک و مقرون به صرفه می شود ، به ویژه هنگامی که در اطراف موشک های کوچکتر طراحی شود. یک نقطه ضعف بالقوه این است که یک موشک خراب می تواند لوله پرتاب کننده را از بین ببرد.مزیت سیستم پرتاب سرد در ایمنی آن است: در صورت خرابی موتور موشک در هنگام پرتاب ، سیستم پرتاب سرد می تواند موشک را به بیرون پرتاب کند و در نتیجه تهدید را کاهش داده یا از بین ببرد. به همین دلیل ، VLS های روسی اغلب با یک شیب طراحی می شوند تا یک موشک خراب به جای روی عرشه کشتی در آب فرود آید. با افزایش اندازه موشک ، مزایای پرتاب پرتاب افزایش می یابد. بیش از اندازه مشخص ، تقویت کننده موشک را نمی توان با خیال راحت در محدوده بدنه کشتی آتش زد. اکثر ICBM ها و SLBM های مدرن راه اندازی سرد می شوند.
راه اندازی سرد
زمان پرتاب سریع موشک ها بسیار سریعتر است زیرا موشک از کشتی تقریباً بلافاصله پس از روشن شدن موتور از کشتی خارج می شود ، در حالی که با سیستم پرتاب سرد ، موشک ابتدا باید از سلول پرتاب خارج و سپس مشتعل شود ، بنابراین زمان پرتاب افزایش می یابد. به علاوه بر این ، سیستم های پرتاب سرد نیازی به سیستم مدیریت گازهای خروجی داغ ندارند ، اما نیاز به سیستم تخلیه گاز ، پیستون یا آسانسور دارند که می تواند نگرانی های مکانیکی بیشتری را ایجاد کند.
خطر اصلی سیستم های پرتاب گرم ، خطر شلیک محدود است. به همین ترتیب ، سیستم های پرتاب سرد خطر پرتاب موشک بدون احتراق موتور موشک را دارند و به طور بالقوه منجر به سقوط موشک پرتاب شده بر روی عرشه کشتی می شود.I hope I help you
سکوهای پرتاب زیر زمینی (Underground Missile Launchers) که داخل تاسیسات زیر زمینی موشکی (UMF) می باشند نیز از نوع سکوهای پرتاب غیر متحرک می باشند.
لانچر رگباری :
به این تایپ قدیمی و پراستفاده از سکوهای پرتاب موشکی، اصطلاحا Multiple Launcher می گویند.این سکوهای موشکی، بسته به نوع مهندسی آن ها، می توانند تعداد قابل توجهی موشک به سمت هدف (اهداف) شلیک کنند
لانچر توپ :
این نوع لانچر نیز سابقه ی بسیار قدیمی دارد و اکنون نسل تکامل یافته ی آن را با نام هویتزر (Howitzer) می شناسیم که هزینه ی تولید انبوه و استفاده ی آن نسبت به سایر لانچر های موشکی و همچنین سامانه های موشکی (Missile Systems) کمتر است و به همین دلیل برای حملات سنگین علیه دشمن، از این تایپ لانچر بیشتر از سایر تایپ ها استفاده می شود.
به لانچر توپ اصطلاحا Gun Launcher می گویند.
لانچر متحرک :
Mobile Launcher یا همان سکوی پرتاب متحرک موشکی تایپی از لانچرهای مباشد
لانچر تک ریلی :
به این نوع لانچر اصطلاحا Mono-rail Launcher گفته می شود که به دو دسته ی لانچر ثابت (Fixed launcher) و (Mobile launcher) تقسیم می شوند.هر واحد لانچر تک ریلی می تواند صرفا یک فروند موشک شلیک کند.
لانچر پرتابل :
به سکوهای پرتاب سبک و قابل حمل اصطلاحا Portable Launcher یا لانچر پرتابل (پرتیبل) می گویند.
این نوع لانچر به طور گسترده به منظور استفاده در سامانه های موشکی ضد زره (AAeMS) و سامانه های موشکی ضد هوایی (SAM Systems) از نوع دوشپرتاب طراحی و تولید شده است.
لانچر پرتابل در انواع مختلفی ساخته شده است و تهدید بزرگی برای هواپیماهای پشتیبان زمینی (ground support)، پهپادها و مخصوصا بالگردها به شمار می آید
بدلیل استفاده ی آسان این لانچر نسبت به سایر تایپ های لانچرها، فراوانی تولید، قیمت کمتر و قابل حمل بودن آن، یکی از خطرناکترین سلاح ها به شمار می آید، زیرا یک فرد می تواند با مسلح کردن این لانچر به موشک آن، حتی از داخل یک ساختمان نیز یک هواپیما و یا یک بالگرد را نابود سازد و یا بار نوع راکت انداز آن، یک وسیله ی نقلیه ی زره ای را منهدم کند.
لانچر هوایی :
به سکوهای نصب شده ی زیر هواپیمای نظامی به منظور پرتاب موشک های غیر هدایت شونده و یا موشک های مجهز به سیستم هدایتی، اصطلاحا Post Aircraft Rocket Launcher می گویند.
لانچر چهارگانه :
به سکوهای پرتاب موشکی ای که قابلیت پرتاب همزمان 4 فروند موشک به سمت هدف را دارند، لانچرهای چهارگانه (لانچرهای چهارتایی) یا Quadruple Launcher می گویند.
لانچر جمع شونده :
به سکوهای موشکی ای که توانایی باز و جمع شدن را داشته باشند، لانچرهای جمع شونده یا Retractable Launchers می گویند.بیشترین کاربرد این نوع لانچرها در نیروی دریایی می باشد.سامانه های سام موجود بر روی رزم ناو ها عموما از نوع لانچرهای retractable می باشند.
لانچر سرپوشیده :
سکوی پرتاب سرپوشیده یا به اصطلاح Shoe Launcher می تواند بسیاری از تایپ های ذکر شده در موارد بالا و پایین باشد.
در کل به سکوی پرتابی که قبل و بعد از پرتاب موشک از دید هواپیماها و سیستم های اطلاعاتی بدون سرنشین (URAS و URAV) و همچنین ماهواره ها (Satellites) ی جاسوسی پنهان شده باشد (یا به اصطلاح استتار کرده باشد) را shoe launcher می گوییم.
لانچر برجی :
به لانچری که دارای برج می باشد اصطلاحا Tower Launcher می گویند.
کاربرد گسترده ی این نوع سکوی پرتاب در پرتاب 90 درجه ی موشک های بالستیک می باشد.
به عبارت دیگر ، در زمینه نظامی ، موشک یک سلاح هدایت شونده بدون موشک و بدون قابلیت فرمان پذیری است. موشک یک سلاح خودران است ، اغلب موشک دار (اما نه همیشه) ، که دارای نوعی سیستم هدایت است تا بتواند در پرواز به سمت هدف خود حرکت کند.
موشک ها از موتور استفاده می کنند ، عموماً یک نوع موتور موشک یا موتور جت. ... این مراحل ممکن است همه از انواع مشابه باشند یا ممکن است ترکیبی از انواع موتور را شامل شوند-به عنوان مثال ، موشک های کروز پرتاب سطحی اغلب دارای تقویت کننده موشک برای پرتاب و موتور جت برای پرواز مداوم هستند. در سیستم موشکی و موشکی: اصول طراحی شوروی پیشگام روش "پرتاب سرد" بود ، که در آن موشک با گاز بیرون رانده می شود و موتور موشک پس از پاکسازی موشک از سیلو مشتعل می شود. این روش ، اساساً همان سیستم مورد استفاده در SLBM ها ، امکان استفاده مجدد از سیلوها را پس از تعمیر جزئی فراهم می کند.پرتاب موشک به آسانی فشار دادن دکمه قرمز نیست. برای اطمینان از شلیک ایمن به مهندسی و علم زیادی نیاز است. در این مقاله سعی می کنیم روش های شلیک از سیستم های پرتاب عمودی (VLS) را توضیح دهیم. VLS از دو روش مختلف برای شلیک استفاده می کند.یک سیستم پرتاب عمودی می تواند پرتاب داغ باشد ، جایی که موشک در سلول مشتعل می شود ، یا پرتاب سرد ، جایی که موشک با گاز تولید شده توسط ژنراتور گازی که بخشی از خود موشک نیست خارج می شود و سپس موشک مشتعل می شود. "سرد" در مقایسه با اگزوز موتور موشک نسبتاً سرد است.موشک وسیله ای است که از موتور موشک برای حرکت خود در سرعت های بالا استفاده می کند. موشک ها معمولاً موشک هایی هستند که هدایت می شوند و حاوی نوعی مواد منفجره هستند. در روزهای اولیه برنامه فضایی ایالات متحده ، مهندسان از موشک های نظامی استفاده کردند تا کپسول های فضایی حاوی فضانوردان را حمل کنند
زمان پرتاب سریع موشک ها بسیار سریعتر است زیرا موشک از کشتی تقریباً بلافاصله پس از روشن شدن موتور از کشتی خارج می شود ، در حالی که با سیستم پرتاب سرد ، موشک ابتدا باید از سلول پرتاب خارج و سپس مشتعل شود ، بنابراین زمان پرتاب افزایش می یابد. به
یک سیستم پرتاب عمودی می تواند پرتاب داغ باشد ، جایی که موشک در سلول مشتعل می شود ، یا پرتاب سرد ، جایی که موشک با گاز تولید شده توسط ژنراتور گازی که بخشی از خود موشک نیست خارج می شود و سپس موشک مشتعل می شود. "سرد" در مقایسه با اگزوز موتور موشک نسبتاً سرد است. یک سیستم پرتاب گرم نیازی به مکانیزم پرتاب ندارد ، اما به طریقی برای دفع اگزوز و گرمای موشک هنگام خروج از سلول نیاز دارد. اگر موشک در یک سلول بدون مکانیزم پرتاب مشتعل شود ، سلول باید در برابر حرارت فوق العاده ای که ایجاد می کند بدون احتراق موشک ها در سلول های مجاور مقاومت کندRocket launcher silo
در روش شلیک گرم موشک در سلول روشن میشود و توسط نیروی پیشرانه خود به سمت بالا حرکت میکند.
در روش شلیک سرد موشک توسط نیروی گازی که توسط یک ژنراتور گاز تولید میشود به سمت بالا شلیک شده و پس از طی مسافتی به صورت عمودی و دور شدن از شناور روشن میشود. ژنراتور گاز بخشی از سیستم موشک انداز بوده و مجزا از خود موشک میباشد. واژه «سرد» به دلیل دمای پایین اگزوز راکت در مقایسه با روش قبلی به کار میرود.
یک سیستم شلیک گرم نیاز به یک مکانیسم پرتابگر اولیه ندارد ولی در عوض نیاز به روشهایی برای خنثی کردن گازها و گرمای حاصله از اگزوز موشک در هنگام ترک سلول میباشد. اگر موشک بدون مکانیسم پرتابگر اولیه و به روش گرم شلیک شود، آنگاه سلول پرتابگر باید در برابر گرمای عظیمی که توسط موشک تولید میشود به خوبی مقاوم باشد تا مانع از انتقال گرما به سلولهای مجاور و انفجار موشکهای آنها بشود.
مزیت روش شلیک گرم این است که موشک با نیروی خودش سلول شلیککننده را ترک میکند و در نتیجه نیاز به یک سیستم جداگانه و اضافه برای پرتاب موشک از لوله شلیککننده نمیباشد. این ویژگی باعث میشود تا سیستمهای شلیک گرم بتوانند سادهتر، کم حجم تر و اقتصادی تر طراحی و توسعه داده شوند و بخصوص در کاربردهایی که از موشکهای کوچکتر استفاده میکنند بسیار مقرون به صرفه باشند. عیب اصلی این سیستمها این است که اگر موشک در هنگام پرتاب دچار نقص فنی و خرابی شود، میتواند لوله موشک انداز را نابود کند.
شلیک گرم یک موشک تاماهاک از یک سیستم موشک انداز عمودی Mark 41 متعلق به نیروی دریایی ایالات متحده
مزیت سیستم شلیک سرد ایمنی آن است. اگر یک موشک در هنگام پرتاب دچار نقص فنی شود، سیستم شلیک سرد میتواند آن را با استفاده از نیروی گاز به بیرون پرتاب کند که باعث کاهش یا حذف خطر میشود. برای این منظور سیستمهای موشک انداز عمودی روسی اغلب دارای یک شیب زاویه ای هستند که باعث میشود موشک کاملاً عمودی به طرف بالا حرکت نکند و زاویه داشته باشد. این ویژگی کمک میکند که در صورتی که موشک از کار بیفتد به جای اینکه عمودی و مستقیم به بالا برود و بعد در جهت معکوس به روی عرشه کشتی برگردد، به دلیل زاویه پرتاب به درون آب سقوط کند.
هر چه اندازه موشک بزرگتر شود، مزیت استفتده از سیستم پرتابگر اولیه (شلیک سرد) هم افزایش مییابد. از اندازه معینی به بالاتر ،موتور پیشرانه موشک نمیتواند بدون خطر احتمال صدمه زدن به بدنه کشتی روشن شود. اکثر موشکهای بالستیک قارهپیما و موشکهای بالستیک زیر دریایی مدرن از روش شلیک سرد استفاده میکنند.
سیستمهای موشک انداز عمودی شناورهای سطحی آمریکایی از سلولهای موشکی استفاده میکنند که به صورت مشبک در کنار هم قرار گرفتهاند و هر سلول قابلیت نگهداری یک موشک را دارد که و همچنین دارای سیستم شلیک گرم هستند، بنابراین هر سلول باید دارای لوله اگزوزی جهت تخلیه شعله و گازهای خروجی موشک باشد. فرانسه، ایتالیا و بریتانیا دارای سیستمهای سیلور هستند که در سیستم دفاع موشکی ضدهوایی اصلی (مخفف انگلیسی: PAAMS) به کار میروند و سیستمهای شلیک گرم مشابه با سیستمهای آمریکایی هستند. روسیه هم یک سیستم مشبک با یک موشک در هر سلول و هم یک سیستم ششلولی چرخان با بیش از یک موشک در هر سلول پرتابگر تولید میکند که هر دو سیستمهای شلیک گرم هستند. روسیه همچنین در بعضی از سیستمهای موشک انداز عمودی خود مثل سیستم موشکی تور از سیستم شلیک سرد استفاده میکند. جمهوری خلق چین در ناوشکن Type 052C از یک سیستم شلیک سرد دایره ای شکل استفاده میکند که موشک را از لوله موشک انداز به بیرون پرتاب میکند و همچنین در ناوچه Type 054A از سیستم شلیک گرم مستطیل شکل با یک موشک در هر سلول و به صورت مشبک بهره میبرد. پرتاب سرد به علت استارت موتور اصلی در خارج از VLS به علت کاهش فشار شدید بر روی سازه پرتابگر باعث افزایش عمر عملیاتی و دوره بازبینی آن خواهد شد.از مزایای دیگر این نوع پرتاب میتوان به کم بودن محدودیت نسبت به سایز موشک داخل کنیستر است که میتوان تا جای ممکن قطر موشک و سایز موتور و نازل موتور را بزرگ طراحی کرد ولی این موارد به شدت در سیستم های پرتاب گرم با اهمیت و دارای طراحی های کنترل شده بیشتر میباشد.همچنین در این پرتابگر ها نیاز به فضایی در مابین پرتابگر ها به منظور خروج گازهای داغ نیست و این موضوع باعث کوچکتر شدن فضای کلی سامانه VLS در عرشه میشود.پس به صورت کلی از این نوع پرتابگر ها میتوان موشک های بزرگتری را پرتاب کرد.اما با تمام این مسائل مواردی است که از نظر تکنیکی باعث افزایش ریسک استفاده از پرتاب سرد میشود به طور مثال امکان مشتعل نشدن موتور اصلی موشک پس از خروج از کنیستر است.در این صورت پس از باز گشت موشک بر روی عرشه احتمال بروز فاجعه حتمی استیک اشکال جزئی دیگری نیز به روش پرتاب سرد وارد است و آن هم افزایش زمان درگیری است و با خروج موشک از لانچر و استارت موتور اصلی وسپس افزایش شتاب در کل باعث افزایش زمان رسیدن موشک به هدف میشود در صورتی که در پرتاب گرم افزایش شتاب موشک از داخل پرتابگر آغاز میشود.موضوع زمان درگیری در انتها باعث تاثیر در انرژی جنبشی پرتابه خواهد شد واین موضوع یک اولویت اساسی برای موشک های بدون سرجنگی است و موشک برای انهدام هدف متکی به انرژی جنبشی کسب کرده در طی مسیر پرواز است.همچنین پرتاب گرم در سیستم های درگیری نزدیک و برد میانی بسیار مهم است زیرا با توجه به سرعت پرتابه نزدیک شونده دشمن.زمان مقابله به مثل به یک شاه کلید برای دفاع تبدیل میشود به گونه ای که هرچقدر سریع تر موشک خودی درگیر شود احتمال موفقیت افزایش خواهد یافت.به طور کلی پرتابگر های گرم از قابل اعتماد ترین سیستم ها هستند و حتی در صورت عمل نکردن موتور موشک نه احتمال بروز فاجعه ای است و نه حتی موشک از دست میرود و به سادگی در داخل کنیستر باقی خواهد ماند.;کینستر موشک
را از ورود مواد خارجی ، ارتعاشات ضربه ای و آب و هوایی مانند باران و برف محافظت می کند و پرتاب صاف را هنگام پرتاب تسهیل می کند. . پیشگام روش "پرتاب سرد" بود ، که در آن موشک با گاز بیرون رانده می شود و موتور موشک پس از پاکسازی موشک از سیلو مشتعل می شود. این روش ، اساساً همان سیستم مورد استفاده در SLBM ها ، امکان استفاده مجدد از سیلوها را پس از تعمیر جزئی فراهم می کند.
مزیت یک سیستم پرتاب داغ این است که موشک با استفاده از موتور خود از سلول پرتاب خارج می شود و این امر نیازی به سیستم جداگانه ای برای پرتاب موشک از لوله پرتاب کننده ندارد. این امر به طور بالقوه باعث توسعه و تولید یک سیستم پرتاب گرم نسبتاً سبک ، کوچک و مقرون به صرفه می شود ، به ویژه هنگامی که در اطراف موشک های کوچکتر طراحی شود. یک نقطه ضعف بالقوه این است که یک موشک خراب می تواند لوله پرتاب کننده را از بین ببرد.مزیت سیستم پرتاب سرد در ایمنی آن است: در صورت خرابی موتور موشک در هنگام پرتاب ، سیستم پرتاب سرد می تواند موشک را به بیرون پرتاب کند و در نتیجه تهدید را کاهش داده یا از بین ببرد. به همین دلیل ، VLS های روسی اغلب با یک شیب طراحی می شوند تا یک موشک خراب به جای روی عرشه کشتی در آب فرود آید. با افزایش اندازه موشک ، مزایای پرتاب پرتاب افزایش می یابد. بیش از اندازه مشخص ، تقویت کننده موشک را نمی توان با خیال راحت در محدوده بدنه کشتی آتش زد. اکثر ICBM ها و SLBM های مدرن راه اندازی سرد می شوند.
راه اندازی سرد
زمان پرتاب سریع موشک ها بسیار سریعتر است زیرا موشک از کشتی تقریباً بلافاصله پس از روشن شدن موتور از کشتی خارج می شود ، در حالی که با سیستم پرتاب سرد ، موشک ابتدا باید از سلول پرتاب خارج و سپس مشتعل شود ، بنابراین زمان پرتاب افزایش می یابد. به علاوه بر این ، سیستم های پرتاب سرد نیازی به سیستم مدیریت گازهای خروجی داغ ندارند ، اما نیاز به سیستم تخلیه گاز ، پیستون یا آسانسور دارند که می تواند نگرانی های مکانیکی بیشتری را ایجاد کند.
خطر اصلی سیستم های پرتاب گرم ، خطر شلیک محدود است. به همین ترتیب ، سیستم های پرتاب سرد خطر پرتاب موشک بدون احتراق موتور موشک را دارند و به طور بالقوه منجر به سقوط موشک پرتاب شده بر روی عرشه کشتی می شود.I hope I help you
-
rohamavation
نام: roham hesami radرهام حسامی راد
محل اقامت: 100 مایلی شمال لندن جاده آیلستون، لستر، لسترشر. LE2
عضویت : سهشنبه ۱۳۹۹/۸/۲۰ - ۰۸:۳۴
پست: 3278-
سپاس: 5494
- جنسیت:
تماس:
Re: هوافضا
وسیله نقلیه پرتاب ماهواره دقیقاً چیست؟
موشکی که برای پرتاب ماهواره استفاده می شود "وسیله پرتاب ماهواره" نامیده می شود. یک وسیله نقلیه پرتاب از چندین بخش یا "مرحله" مختلف تشکیل شده است که هر مرحله نقش متفاوتی را بازی می کند.اولین مرحله از وسیله نقلیه پرتاب شامل سوختی است که برای بلند کردن ماهواره و پرتاب وسیله نقلیه از زمین و آسمان مورد نیاز است. این موشک ها باید بسیار قدرتمند باشند زیرا یک وسیله نقلیه پرتاب در هنگام صعود صدها تن وزن دارد. بعد از تمام شدن سوخت ، مرحله اول دیگر لازم نیست و خراب می شود و به زمین می افتد.
مرحله دوم شامل راکت های کوچکتری است که پس از پایان مرحله اول مشتعل می شوند. موشک های مرحله دوم مخازن سوخت خود را دارند. مرحله دوم برای ارسال ماهواره به فضا استفاده می شود. مانند مرحله اول ، بعد از تمام شدن سوخت و سوختن در جو زمین یا عقب افتادن ، آن خراب می شود.
مرحله بالایی وسیله پرتاب به ماهواره متصل می شود ، که در یک محافظ فلزی محصور شده است ، "فیرینگ" نامیده می شود. این نمایشگاه ماهواره را هنگام پرتاب محافظت می کند و حرکت وسیله پرتاب را از طریق مقاومت در برابر جو زمین آسان می کند. وقتی ماهواره بالاتر از جو زمین قرار گرفت و در جو زمین سوخت ، این نیروگاه از هم جدا می شود. موشک های مرحله فوقانی بعد از قرار گرفتن ماهواره در فضا شلیک می کنند و ماهواره را دقیقاً در مکان مورد نیاز قرار می دهند.
هنگامی که وسیله پرتاب از جو زمین خارج شد ، ماهواره از مرحله بالایی جدا می شود. سپس ماهواره به یک "مدار انتقال" فرستاده می شود که ماهواره را بالاتر به فضا می فرستد. ماهواره هنگامی که به ارتفاع مداری دلخواه خود می رسد ، صفحات خورشیدی و آنتن های ارتباطی خود را که در حین پرواز دور نگه داشته شده بود ، باز می کند. سپس ماهواره در مدار خود با ماهواره های دیگر قرار می گیرد
امروزه ، بسیاری از موشک ها بیش از یک ماهواره در مدار را حمل می کنند. اما چگونه یک موشک چند ماهواره را در مدار خود قرار می دهد؟
یک استراتژی نسبتاً رایج این است که دو یا چند ماهواره را روی هم جمع کنید. ماهواره بالایی مستقیماً در داخل تورینگ محموله قرار دارد . هر ماهواره دیگری که در زیر قرار دارد ، به نوعی یک پرده داخلی نشسته است. سیستم های پرتاب دوگانه نامیده می شوند .
بسته به نیاز ماهواره ها ، مرحله بالایی موشک می تواند چندین بار مشتعل شود با این حال ، 'شمع گذاری' ماهواره ها تنها روش نیست. ماهواره ها دقیقاً در کنار یکدیگر پرتاب می شوند و عملاً از یک آداپتور محموله مشترک استفاده می کنند. اگر ماهواره ها به گونه ای ساخته و طراحی شوند می توان این کار را انجام داد ،
این واقعاً به موشک و مأموریت و غیره بستگی دارد. اما به طور کلی همان موضوع مشترک صحبت می شود. فضاپیماها به طور معمول به موشک بارگیری می شوند و توسط نوعی پیچ و مهره انفجاری (یا گیره های دیگر) از نوع فناوری در جای خود نگه داشته می شوند. هنگامی که موشک آماده رها کردن فضاپیما باشد ، پیچ های انفجاری را فعال می کند و باعث می شود فضاپیما با سرعتی از موشک دور شود.
برای پرتاب یک موشک تک مرحله ای ، اندازه خاصی وجود دارد که انرژی مورد نیاز را به حداقل می رساند. وزن موشک شما (فقط بدنه ، نه سوخت) با اندازه $P_R=g\rho V $ افزایش می یابد. و حداقل مقدار انرژی لازم برای وارد کردن موشک به مدار بدیهی است که با وزن آن افزایش می یابد:$ W_{min} = hP_R + W',$جایی که $W' $ کاری است که شما برای بلند کردن سوخت انجام می دهید. $W' $ در اینجا مهم نیست ، اما برای ثبت ، چیزی شبیه به زیر است:
$ W' = g\int_0^h m_{fuel}(z)dz'.$بنابراین ، اگر موشک خیلی کوچک باشد ، مقدار کمی از سوخت که می توانید در آن جای دهید ، انرژی کافی برای بلند کردن بدنه را ندارد. اگر موشک خیلی بزرگ است ، پس شما فقط انرژی را هدر می دهید زیرا غیرضروری سنگین است. این بدان معنی است که شما یک اندازه بهینه دارید که انرژی یک موشک تک مرحله ای را به حداقل می رساند. هنگامی که آن را پیدا کردید ، میزان سوخت مربوط به آن اندازه حداقل مورد نیاز برای انتقال موشک به مدار است.
اکنون موشکی در همان اندازه ، اما با 2 مرحله در نظر بگیرید. بیایید فرض کنیم که دارای یک موتور اضافی از وزن pe است. بیایید فرض کنیم که ، وقتی موشک شما به ارتفاع h / 2 رسید ، بیش از 1/3 مخزن آن خالی خواهد بود (که درست است). از آنجا که آن قسمت از مخزن من خالی است ، من ممکن است آن را پشت سر بگذارم (همراه با موتور) و وزن مرده را رها کنم (من آن را pt می نامم). اگر آن را در ساعت / 2 رها کنم انرژی لازم برای رسیدن به مدار خواهد بود
$W_{min2} = \frac{h}{2}(P_R + p_e) + \frac{h}{2}(P_R - p_t) + W'_2 = hP_R + W'_2 - \frac{h}{2}(p_t - p_e). $اگر به میزان قابل توجهی میزان سوخت اولیه را کاهش دهیم ، می توانیم $W'_2\leq W' $ تولید کنیم. بنابراین ، $ W_{min2}$ به وضوح کمتر از $W_{min} $ است ، به شرطی که موتوری که باید اضافه کنید سبکتر از مخزنی است که انداخته اید.4
ساده ترین راه برای فكر كردن در مورد آن این است ، تصور كنید تمام توده باقیمانده وقتی یك موشك 85٪ از سوخت خود را سوزانده است. جرم بیشتر مخزن و سازه در حال حاضر بیش از حد و ضایعات است. خوب است که بتوانیم آن جرم اضافی را جتیسون کنیم تا سوخت باقی مانده بتواند فقط محموله را تسریع کند.
این کاری است که یک موشک چند مرحله ای انجام می دهد. این جرم مراحل اولیه را جت می کند تا سوخت و رانش باقیمانده بتواند جرم بسیار کوچکتر را با سرعت بسیار بالاتری از آنچه می توانست اگر تنها یک مرحله وجود داشته باشد ، تسریع کند. به یاد داشته باشید شتاب متناسب با جرم است ، بنابراین اگر می توانید 80٪ از جرم خود را خلاص کنید ، می توانید بار حمل را 5 برابر بیشتر برای همان سوخت باقی مانده شتاب دهید.مزیت دیگر این است که شما می توانید از موتورهای موشکی استفاده کنید که برای سرعت های مختلف تنظیم شده اند. در مرحله اولیه شما به حداکثر رانش نیاز دارید و موشک به سرعت حرکت نمی کند. در مراحل بعدی شما موتورهای با کارایی بالا می خواهید ، نه لزوماً رانش بالا.
راکت می تواند یک موشک ، فضاپیما ، هواپیما یا وسیله نقلیه دیگری باشد که از موتور موشک رانش (یا فشار) می یابد
موشک های شیمیایی متداول ترین نوع موشک هستند و به طور معمول با احتراق پیشرانه موشک ، اگزوز خود را ایجاد می کنند. پیشرانه ها درون موشک حمل می شوند
موتورهای موشکی با عمل و واکنش کار می کنند. موتورهای موشکی موشک ها را به راحتی با پرتاب سریع اگزوز آنها به عقب سوق می دهند
موشک ها برای آتش بازی ، سلاح ، صندلی های پرتاب ، وسایل پرتاب برای ماهواره های مصنوعی ، پرواز فضایی انسان و اکتشافات فضایی استفاده می شوند
موشک ها ، چه به اندازه آتش بازی چه به اندازه وسایل پرتاب بزرگ ، با همان اصل عمل می کنند.
پوشش داده شده با یک سیستم محافظت حرارتی برای جلوگیری از حرارت اصطکاک هوا در هنگام پرواز و نگه داشتن در دمای سرد مورد نیاز برای برخی از سوخت ها و اکسید کننده ها
پره ها به بعضی از موشک های پایین قاب متصل می شوند تا ثبات را در حین پرواز فراهم کنند
-سیستم محموله
به ماموریت موشک بستگی دارد - مواد منفجره ، پرتاب ماهواره ، مسافران انسانی ، سیستم هدایت ممکن است شامل سنسورهای بسیار پیچیده ، کامپیوترهای روی صفحه ، رادارها و تجهیزات ارتباطی برای مانور موشک در پرواز باشد همچنین باید مقداری از ثبات را فراهم کند تا موشک در پرواز سقوط نکند
سیستم پیشرانه پیشرانه = سوخت + اکسید کننده انواع پیشرانه ها ،
سیستم های سوخت مایع ،سوخت و اکسید کننده از مخازن جداگانه به محفظه احتراق پمپ می شود
سیستم های پیشرانه جامد ،اینها سوخت و اکسید کننده را که از قبل با هم مخلوط شده اند ، در حالت جامد حمل می کنند
بخشهای مختلف موشک که در بالا توضیح داده شد بر اساس عملکرد به ساختار ، محموله ، سیستم هدایت و پیشرانه طبقه بندی شده اند. گروه بندی های احتمالی دیگری نیز وجود دارد.
به منظور تعیین وزن و عملکرد پرواز ، مهندسان غالباً محموله ، سازه ، ساختار پیشرانه (نازل ، پمپ ها ، مخازن و غیره) و راهنمایی ها را در یک پارامتر وزن خالی گروه بندی می کنند.
سپس وزن پیشرانه باقیمانده به تنها عاملی تبدیل می شود که با تعیین عملکرد موشک با زمان تغییر می کند.
انواع پیشرانه ها (ادامه) ،سیستم های پیشرانه گازسوز نوعی گاز فشرده را درگیر می کند
سیستم های پیشرانه ترکیبی معمولاً دارای یک سوخت جامد و یک اکسید کننده مایع یا گاز هستند
سیستم های پیشران ژل تحقیقی در مورد ژلینگ شدن پیشرانه های مایع برای دادن یک پیشرانه با فشار بخار کم برای کاهش خطر تصادفات انجام شده است.
سیستم های پیشرانه ژل مانند یک ماده سوخت جامد در ذخیره سازی و مانند یک پیشرانه مایع در حال استفاده رفتار می کند.
بخشهای مختلف موشک که در بالا توضیح داده شد بر اساس عملکرد به ساختار ، محموله ، سیستم هدایت و پیشرانه طبقه بندی شده اند. گروه بندی های احتمالی دیگری نیز وجود دارد.
به منظور تعیین وزن و عملکرد پرواز ، مهندسان غالباً محموله ، سازه ، ساختار پیشرانه (نازل ، پمپ ها ، مخازن و غیره) و راهنمایی ها را در یک پارامتر وزن خالی گروه بندی می کنند.
سپس وزن پیشرانه باقیمانده به تنها عاملی تبدیل می شود که با تعیین عملکرد موشک با زمان تغییر می کند.
یک وسیله نقلیه پرتابگر تصویر خوبی از قانون سوم حرکت نیوتن است ، "برای هر عملی ، یک واکنش برابر و مخالف وجود دارد." در مورد یک وسیله نقلیه پرتاب ، "عمل" عبارت است از جریان خروجی گازهای خروجی از عقب وسیله نقلیه حاصل از احتراق سوخت خودرو در موتور موشک آن ، و "واکنش" فشار است ، رانش نامیده می شود ، به ساختار داخلی وسیله نقلیه پرتاب اعمال می شود که آن را به سمت مخالف جریان خروجی سوق می دهد. برخلاف موتورهای جت ، که با همان اصل واکنش واکنش عمل می کنند اما اکسیژن مورد نیاز برای سوزاندن سوخت خود را از اتمسفر به دست می آورند ، موشک ها عامل اکسیداسیون خود را با خود حمل می کنند. به این ترتیب ، آنها می توانند در خلا فراتر از جو کار کنند.
هدف اصلی طراحان وسیله نقلیه پرتاب به حداکثر رساندن توانایی بلند کردن وسیله نقلیه در عین حال تأمین سطح اطمینان کافی با هزینه قابل قبول است. دستیابی به تعادل در بین این سه عامل چالش برانگیز است. برای اینکه خودروی پرتابگر از زمین بلند شود ، رانش به سمت بالا باید از وزن ترکیبی محموله فضاپیما ، پیشرانه های خودرو و ساختار آن بیشتر باشد. این امر باعث می شود که ساختار مکانیکی ، مخازن سوخت و موتورهای موشکی تا حد ممکن سبک اما به اندازه کافی قوی باشد تا بتواند در برابر نیروها و تنش های مرتبط با شتاب سریع از طریق جو مقاوم ، مقاومت کند. غالباً ، پیشرانه 80 درصد یا بیشتر از وزن كل ترکیب وسیله نقلیه و فضاپیمای پرتاب قبل از پرتاب را تشکیل می دهد.
یک وسیله نقلیه مخصوص پرتاب می تواند بسته به ماموریت و وزن فضاپیمای مورد نظر ، از چند طریق مختلف پیکربندی شود. این تنظیم مجدد را می توان با افزودن تعداد متفاوتی از تقویت کننده های تسمه ای ، معمولاً موتورهای راکتی جامد ، به مرحله اول خودرو یا با استفاده از مراحل مختلف بالایی انجام داد.
محافظت از بار
سفینه ای که وسیله نقلیه پرتابی به فضا حمل می کند تقریباً همیشه به قسمت بالای خودرو متصل است. در حین انتقال اتمسفر ، محموله با نوعی پرینت محافظت می شود که اغلب از مواد کامپوزیتی سبک ساخته می شود . هنگامی که وسیله پرتاب فراتر از متراکم ترین قسمت جو است ، این نمایشگاه از بین می رود. بعد از اینکه فضاپیما به سرعت اولیه مداری رسید، ممکن است برای شروع ماموریت خود ، از مرحله بالایی نهایی خودرو پرتاب جدا شود. متناوباً ، اگر قرار باشد فضاپیما به غیر از مدار کم زمین قرار بگیرد ، موتور موشکی مرحله بالا ممکن است برای مدتی خاموش شود زیرا بار فضاپیما در مدار قرار دارد. سپس موتور مجدداً راه اندازی می شود تا سرعت اضافی مورد نیاز برای انتقال محموله به مدار زمین بالاتر یا تزریق آن به مسیری كه آن را به اعماق فضا می برد ، منتقل شود.
پیمایش ، راهنمایی و کنترل
برای اینکه یک وسیله نقلیه بتواند یک فضاپیما را در مدار مورد نظر قرار دهد ، باید از قابلیت ناوبری ، هدایت و کنترل برخوردار باشد. جهت تعیین موقعیت ، سرعت و جهت گیری وسیله نقلیه در هر نقطه از مسیر حرکت به ناوبری نیاز است. همانطور که این متغیرها اندازه گیری می شوند ، سیستم هدایت وسیله نقلیه تعیین می کند که برای هدایت خودرو به سمت هدف مورد نظر چه اصلاحاتی لازم است. از سیستم های کنترلی برای اجرای دستورات راهنمایی از طریق حرکت موتورهای موشکی خودرو یا تغییر جهت رانش خودرو استفاده می شود. پیمایش ، راهنمایی و کنترل در بیشتر وسایل پرتاب با ترکیبی از نرم افزارهای پیچیده ، رایانه ها و سایر دستگاه های سخت افزاری حاصل می شود.
قابلیت اطمینان
یک وسیله پرتاب بنابراین تشکیل می شودیک یا چند موتور موشک ؛ سوخت برای موتورهایی که در مخازن سوخت حمل می شوند. سیستم های هدایت ، ناوبری و کنترل ؛ یک محموله و سازه ای که همه این عناصر را در خود جای داده است و ممکن است موتورهای اضافی برای افزایش بالابر به آن متصل شوند. همچنین پیوست های مختلفی بین وسیله نقلیه پرتابگر و صفحه پرتاب آن و ساختارهای مرتبط وجود دارد. یک وسیله نقلیه پرتاب مصرفی فقط یک فرصت برای انجام موفقیت آمیز مأموریت خود دارد ، بنابراین تمام عناصر آن باید دقیقاً و برای قابلیت اطمینان عملیاتی بسیار بالا طراحی و تولید شوند. همچنین ، همانطور که در بالا ذکر شد ، وسایل نقلیه پرتاب به گونه ای طراحی شده اند که تا حد ممکن سبک باشند تا بتوانند حداکثر قابلیت بالابری را داشته باشند. در نتیجه ، هر قسمت از یک وسیله نقلیه پرتاب در هنگام پرتاب نزدیک به نقطه شکست خود کار می کند ، زیرا خودرو تحت فشارهای ناشی از شتاب گرفتن از گذشته قرار می گیردسرعت صدا و انتقال جو و موتورهای موشکی آن تحت فشار ، دما ، شوک و لرزش کار می کنند.
نتیجه نهایی این است که پرتاب یک فضاپیما به فضای بیرونی کاری بسیار دشوار است و شکست های پرتاب یک واقعیت زندگی برای کسانی است که به دنبال دسترسی به فضا هستند. بسیاری از پرتاب های فضایی ، به ویژه آنهایی که فضاپیماهای تجاری را حمل می کنند ، در برابر خرابی بیمه می شوند ، زیرا غالباً سرمایه گذاری بیش از صد میلیون دلار است.
وسایل نقلیه پرتابی که مردم را به فضا منتقل می کنند "دارای رتبه انسانی" هستند. این به این معنی است که آنها از اجزای بالاترین قابلیت اطمینان استفاده می کنند ، در سیستم های حیاتی دارای افزونگی هستند ، قبل از پرتاب آزمایش بیشتری نسبت به وسایل نقلیه پرتاب کننده حامل یک فضاپیمای خودکار انجام می دهند و حاوی سیستم هایی هستند که در مورد مشکلات قریب الوقوع هشدار می دهند تا خدمه قادر به فرار از تصادف تنها یک خرابی یک وسیله نقلیه پرتاب در هنگام بلند شدن هواپیما بوده است که منجر به کشته شدن خدمه شده است این انفجار چلنجر در 28 ژانویه 1986 بود که باعث کشته شدن هر هفت فضانورد داخل هواپیما شد.پرتاب به فضا
اگرچه آنها در بسیاری از جزئیات برای وسایل نقلیه مختلف و پایگاههای مختلف پرتاب متفاوت هستند ، اما مراحل لازم برای آماده سازی یک وسیله نقلیه پرتابگر و میزان بار فضاپیمای آن برای پرتاب ، به طور کلی مشابه است.
اغلب اوقات ، مراحل مختلف و سایر عناصر یک وسیله نقلیه پرتاب به طور جداگانه ساخته می شوند و برای مونتاژ به پایگاه پرتاب حمل می شوند. آن مونتاژ می تواند در تاسیساتی دور از صفحه پرتاب یا در صفحه پرتاب واقع شود. مزیت ساختمان مونتاژ جداگانه این است که بسیاری از مراحل لازم برای آماده سازی خودرو برای پرتاب ، از جمله مونتاژ و سپس تسویه حساب یکپارچه ، در یک محیط بسته قابل انجام است . این همچنین بدان معنی است که صفحه پرتاب برای استفاده های دیگر در طول دوره مونتاژ و پرداخت در دسترس است.
مونتاژ وسایل نقلیه پرتاب یا به صورت عمودی یا افقی انجام می شود. مونتاژ عمودی به تاسیساتی به قدری بلند است که بتواند کل وسیله نقلیه و فضاپیما را در خود جای دهد . اجزای مختلف "انباشته" می شوند ، که از مرحله اول شروع می شوند و اغلب با اتصال فضاپیما به وسیله نقلیه پرتاب به پایان می رسند. (گاهی اوقات فضاپیما و وسیله نقلیه پرتابگر فقط در صفحه پرتاب جفت می شوند.) موتورهای راکت جامد تسمه ای ، اگر قرار است مورد استفاده قرار گیرند ، به مرحله اول هسته متصل می شوند. مونتاژ افقی به صورت انتها به انتها انجام می شود و نیازی به یک ساختمان بلند با دسترسی وسیله نقلیه در چند سطح ندارد. پس از مونتاژ ، تا آنجا که ممکن است آزمایش روی وسیله نقلیه یکپارچه انجام شود تا آمادگی آن برای پرتاب قبل از حمل و نقل به صفحه پرتاب بررسی شود.
هنگامی که به صفحه پرتاب رسید ، وسیله نقلیه به برج پرتاب متصل می شود ، که شامل اتصالات مختلف ناف و نقاط دسترسی است که برای تکمیل مراحل پرداخت و نظارت بر آمادگی نهایی خودرو برای پرتاب مورد نیاز است. اگر وسیله نقلیه به صورت افقی مونتاژ شده باشد ، باید با رسیدن به صفحه پرتاب به حالت عمودی درآید. غالباً صفحه پرتاب شامل نوعی سرپناه برای محافظت از وسیله نقلیه پرتابگر و فضاپیما از عناصر تا نزدیک به زمان پرتاب است و به تکنسین ها اجازه می دهد روند پرداخت را ادامه دهند. وسیله نقلیه پرتابی توسط نوعی وسیله اتصال دهنده روی بالشتک نگه داشته می شود.
اگر وسیله پرتاب روی صفحه پرتاب مونتاژ شود ، تمام مراحل فوق در آنجا انجام می شود. مونتاژ و پرداخت ممکن است چندین ماه طول بکشد و در این مدت صفحه پرتاب نمی تواند برای اهداف دیگر استفاده شود.
با نزدیک شدن به زمان پرتاب ، شمارش معکوس آغاز می شود. زمان شمارش معکوس می تواند از ساعاتی تا چند روز باشد. در هنگام شمارش معکوس ، مراحل نهایی مختلفی در زمان های مشخص انجام می شود تا خودرو برای پرتاب آماده شود. اگر وسیله نقلیه از پیشرانه های مایع استفاده کند ، پس از ذخیره شدن در مخازن نزدیک صفحه پرتاب ، آنها ساعاتی قبل از پرتاب بارگیری می شوند. نگهداری پیشرانه های برودتی در حالت مایع دشوار است. آنها تمایل به گاز شدن و "جوشاندن" وسیله نقلیه دارند. بنابراین ، آنها در مخازن سوخت خودرو تا حد امکان نزدیک به زمان پرتاب بارگیری می شوند و باید اطمینان حاصل شود که مخازن سوخت و اکسید کننده پر هستند. ساعاتی قبل از پرتاب برنامه ریزی شده ، سازه ای که از وسیله نقلیه محافظت کرده است از آن و برج پرتاب دور می شود.
پایگاه های راه اندازی باید به اطلاعات به روز آب و هوا دسترسی داشته باشند. معمولاً قوانینی از پیش تعیین شده در مورد شرایط آب و هوایی قابل قبول برای پرتاب فضایی وجود دارد ، از جمله وزش باد در محل پرتاب و از سطح بالا ، دید (برای نظارت بر وسیله نقلیه در چند دقیقه اول پرواز) و دما. این شرایط در سایتهای پرتاب و در وسایل نقلیه مختلف پرتاب متفاوت است. به عنوان مثال ، فضاپیمای خدمه ای از سایتهای روسی در شرایط بسیار جوی بسیار شدیدتر از آنچه برای پرتاب شاتل فضایی ایالات متحده از پایگاه پرتاب خود در فلوریدا قابل قبول است ، به فضا پرتاب می شود.
در چند دقیقه آخر شمارش معکوس ، بررسی نهایی انجام می شود تا اطمینان حاصل شود که وسیله نقلیه و فضاپیما برای پرتاب آماده هستند و سایر شرایط در وضعیت "رفتن" هستند. تمام اتصالات نافی بین برج پرتاب و خودرو جدا است. قبل از اینکه خودرو متعهد به پرتاب شود ، معمولاً موتورهای موشکی با سوخت مایع اجازه دارند چند ثانیه شلیک کنند. یک بررسی سریع رایانه ای انجام می شود و در صورت وجود نشانه هایی از مشکل ، موتورها می توانند خاموش شوند. پس از احتراق موتورهای راکتی جامد ، خودرو متعهد به پرتاب می شود. هنگامی که لحظه پرتاب فرا می رسد ، دستگاه هایی که وسیله نقلیه را به صفحه پرتاب نگه داشته اند ، به طور انفجاری جدا می شوند و وسیله نقلیه حرکت خود را آغاز می کند.
لانچ پد ها دارای ترانشه هایی برای انتقال شعله های خروجی از خودرو هستند و اغلب حجم زیادی از آب به شعله های آتش تزریق می شود. این کار برای به حداقل رساندن آسیب به وسیله نقلیه و صفحه پرتاب از گرما و ارتعاشات صوتی مرتبط با بلند شدن انجام می شود.
موشکی که برای پرتاب ماهواره استفاده می شود "وسیله پرتاب ماهواره" نامیده می شود. یک وسیله نقلیه پرتاب از چندین بخش یا "مرحله" مختلف تشکیل شده است که هر مرحله نقش متفاوتی را بازی می کند.اولین مرحله از وسیله نقلیه پرتاب شامل سوختی است که برای بلند کردن ماهواره و پرتاب وسیله نقلیه از زمین و آسمان مورد نیاز است. این موشک ها باید بسیار قدرتمند باشند زیرا یک وسیله نقلیه پرتاب در هنگام صعود صدها تن وزن دارد. بعد از تمام شدن سوخت ، مرحله اول دیگر لازم نیست و خراب می شود و به زمین می افتد.
مرحله دوم شامل راکت های کوچکتری است که پس از پایان مرحله اول مشتعل می شوند. موشک های مرحله دوم مخازن سوخت خود را دارند. مرحله دوم برای ارسال ماهواره به فضا استفاده می شود. مانند مرحله اول ، بعد از تمام شدن سوخت و سوختن در جو زمین یا عقب افتادن ، آن خراب می شود.
مرحله بالایی وسیله پرتاب به ماهواره متصل می شود ، که در یک محافظ فلزی محصور شده است ، "فیرینگ" نامیده می شود. این نمایشگاه ماهواره را هنگام پرتاب محافظت می کند و حرکت وسیله پرتاب را از طریق مقاومت در برابر جو زمین آسان می کند. وقتی ماهواره بالاتر از جو زمین قرار گرفت و در جو زمین سوخت ، این نیروگاه از هم جدا می شود. موشک های مرحله فوقانی بعد از قرار گرفتن ماهواره در فضا شلیک می کنند و ماهواره را دقیقاً در مکان مورد نیاز قرار می دهند.
هنگامی که وسیله پرتاب از جو زمین خارج شد ، ماهواره از مرحله بالایی جدا می شود. سپس ماهواره به یک "مدار انتقال" فرستاده می شود که ماهواره را بالاتر به فضا می فرستد. ماهواره هنگامی که به ارتفاع مداری دلخواه خود می رسد ، صفحات خورشیدی و آنتن های ارتباطی خود را که در حین پرواز دور نگه داشته شده بود ، باز می کند. سپس ماهواره در مدار خود با ماهواره های دیگر قرار می گیرد
امروزه ، بسیاری از موشک ها بیش از یک ماهواره در مدار را حمل می کنند. اما چگونه یک موشک چند ماهواره را در مدار خود قرار می دهد؟
یک استراتژی نسبتاً رایج این است که دو یا چند ماهواره را روی هم جمع کنید. ماهواره بالایی مستقیماً در داخل تورینگ محموله قرار دارد . هر ماهواره دیگری که در زیر قرار دارد ، به نوعی یک پرده داخلی نشسته است. سیستم های پرتاب دوگانه نامیده می شوند .
بسته به نیاز ماهواره ها ، مرحله بالایی موشک می تواند چندین بار مشتعل شود با این حال ، 'شمع گذاری' ماهواره ها تنها روش نیست. ماهواره ها دقیقاً در کنار یکدیگر پرتاب می شوند و عملاً از یک آداپتور محموله مشترک استفاده می کنند. اگر ماهواره ها به گونه ای ساخته و طراحی شوند می توان این کار را انجام داد ،
این واقعاً به موشک و مأموریت و غیره بستگی دارد. اما به طور کلی همان موضوع مشترک صحبت می شود. فضاپیماها به طور معمول به موشک بارگیری می شوند و توسط نوعی پیچ و مهره انفجاری (یا گیره های دیگر) از نوع فناوری در جای خود نگه داشته می شوند. هنگامی که موشک آماده رها کردن فضاپیما باشد ، پیچ های انفجاری را فعال می کند و باعث می شود فضاپیما با سرعتی از موشک دور شود.
برای پرتاب یک موشک تک مرحله ای ، اندازه خاصی وجود دارد که انرژی مورد نیاز را به حداقل می رساند. وزن موشک شما (فقط بدنه ، نه سوخت) با اندازه $P_R=g\rho V $ افزایش می یابد. و حداقل مقدار انرژی لازم برای وارد کردن موشک به مدار بدیهی است که با وزن آن افزایش می یابد:$ W_{min} = hP_R + W',$جایی که $W' $ کاری است که شما برای بلند کردن سوخت انجام می دهید. $W' $ در اینجا مهم نیست ، اما برای ثبت ، چیزی شبیه به زیر است:
$ W' = g\int_0^h m_{fuel}(z)dz'.$بنابراین ، اگر موشک خیلی کوچک باشد ، مقدار کمی از سوخت که می توانید در آن جای دهید ، انرژی کافی برای بلند کردن بدنه را ندارد. اگر موشک خیلی بزرگ است ، پس شما فقط انرژی را هدر می دهید زیرا غیرضروری سنگین است. این بدان معنی است که شما یک اندازه بهینه دارید که انرژی یک موشک تک مرحله ای را به حداقل می رساند. هنگامی که آن را پیدا کردید ، میزان سوخت مربوط به آن اندازه حداقل مورد نیاز برای انتقال موشک به مدار است.
اکنون موشکی در همان اندازه ، اما با 2 مرحله در نظر بگیرید. بیایید فرض کنیم که دارای یک موتور اضافی از وزن pe است. بیایید فرض کنیم که ، وقتی موشک شما به ارتفاع h / 2 رسید ، بیش از 1/3 مخزن آن خالی خواهد بود (که درست است). از آنجا که آن قسمت از مخزن من خالی است ، من ممکن است آن را پشت سر بگذارم (همراه با موتور) و وزن مرده را رها کنم (من آن را pt می نامم). اگر آن را در ساعت / 2 رها کنم انرژی لازم برای رسیدن به مدار خواهد بود
$W_{min2} = \frac{h}{2}(P_R + p_e) + \frac{h}{2}(P_R - p_t) + W'_2 = hP_R + W'_2 - \frac{h}{2}(p_t - p_e). $اگر به میزان قابل توجهی میزان سوخت اولیه را کاهش دهیم ، می توانیم $W'_2\leq W' $ تولید کنیم. بنابراین ، $ W_{min2}$ به وضوح کمتر از $W_{min} $ است ، به شرطی که موتوری که باید اضافه کنید سبکتر از مخزنی است که انداخته اید.4
ساده ترین راه برای فكر كردن در مورد آن این است ، تصور كنید تمام توده باقیمانده وقتی یك موشك 85٪ از سوخت خود را سوزانده است. جرم بیشتر مخزن و سازه در حال حاضر بیش از حد و ضایعات است. خوب است که بتوانیم آن جرم اضافی را جتیسون کنیم تا سوخت باقی مانده بتواند فقط محموله را تسریع کند.
این کاری است که یک موشک چند مرحله ای انجام می دهد. این جرم مراحل اولیه را جت می کند تا سوخت و رانش باقیمانده بتواند جرم بسیار کوچکتر را با سرعت بسیار بالاتری از آنچه می توانست اگر تنها یک مرحله وجود داشته باشد ، تسریع کند. به یاد داشته باشید شتاب متناسب با جرم است ، بنابراین اگر می توانید 80٪ از جرم خود را خلاص کنید ، می توانید بار حمل را 5 برابر بیشتر برای همان سوخت باقی مانده شتاب دهید.مزیت دیگر این است که شما می توانید از موتورهای موشکی استفاده کنید که برای سرعت های مختلف تنظیم شده اند. در مرحله اولیه شما به حداکثر رانش نیاز دارید و موشک به سرعت حرکت نمی کند. در مراحل بعدی شما موتورهای با کارایی بالا می خواهید ، نه لزوماً رانش بالا.
راکت می تواند یک موشک ، فضاپیما ، هواپیما یا وسیله نقلیه دیگری باشد که از موتور موشک رانش (یا فشار) می یابد
موشک های شیمیایی متداول ترین نوع موشک هستند و به طور معمول با احتراق پیشرانه موشک ، اگزوز خود را ایجاد می کنند. پیشرانه ها درون موشک حمل می شوند
موتورهای موشکی با عمل و واکنش کار می کنند. موتورهای موشکی موشک ها را به راحتی با پرتاب سریع اگزوز آنها به عقب سوق می دهند
موشک ها برای آتش بازی ، سلاح ، صندلی های پرتاب ، وسایل پرتاب برای ماهواره های مصنوعی ، پرواز فضایی انسان و اکتشافات فضایی استفاده می شوند
موشک ها ، چه به اندازه آتش بازی چه به اندازه وسایل پرتاب بزرگ ، با همان اصل عمل می کنند.
پوشش داده شده با یک سیستم محافظت حرارتی برای جلوگیری از حرارت اصطکاک هوا در هنگام پرواز و نگه داشتن در دمای سرد مورد نیاز برای برخی از سوخت ها و اکسید کننده ها
پره ها به بعضی از موشک های پایین قاب متصل می شوند تا ثبات را در حین پرواز فراهم کنند
-سیستم محموله
به ماموریت موشک بستگی دارد - مواد منفجره ، پرتاب ماهواره ، مسافران انسانی ، سیستم هدایت ممکن است شامل سنسورهای بسیار پیچیده ، کامپیوترهای روی صفحه ، رادارها و تجهیزات ارتباطی برای مانور موشک در پرواز باشد همچنین باید مقداری از ثبات را فراهم کند تا موشک در پرواز سقوط نکند
سیستم پیشرانه پیشرانه = سوخت + اکسید کننده انواع پیشرانه ها ،
سیستم های سوخت مایع ،سوخت و اکسید کننده از مخازن جداگانه به محفظه احتراق پمپ می شود
سیستم های پیشرانه جامد ،اینها سوخت و اکسید کننده را که از قبل با هم مخلوط شده اند ، در حالت جامد حمل می کنند
بخشهای مختلف موشک که در بالا توضیح داده شد بر اساس عملکرد به ساختار ، محموله ، سیستم هدایت و پیشرانه طبقه بندی شده اند. گروه بندی های احتمالی دیگری نیز وجود دارد.
به منظور تعیین وزن و عملکرد پرواز ، مهندسان غالباً محموله ، سازه ، ساختار پیشرانه (نازل ، پمپ ها ، مخازن و غیره) و راهنمایی ها را در یک پارامتر وزن خالی گروه بندی می کنند.
سپس وزن پیشرانه باقیمانده به تنها عاملی تبدیل می شود که با تعیین عملکرد موشک با زمان تغییر می کند.
انواع پیشرانه ها (ادامه) ،سیستم های پیشرانه گازسوز نوعی گاز فشرده را درگیر می کند
سیستم های پیشرانه ترکیبی معمولاً دارای یک سوخت جامد و یک اکسید کننده مایع یا گاز هستند
سیستم های پیشران ژل تحقیقی در مورد ژلینگ شدن پیشرانه های مایع برای دادن یک پیشرانه با فشار بخار کم برای کاهش خطر تصادفات انجام شده است.
سیستم های پیشرانه ژل مانند یک ماده سوخت جامد در ذخیره سازی و مانند یک پیشرانه مایع در حال استفاده رفتار می کند.
بخشهای مختلف موشک که در بالا توضیح داده شد بر اساس عملکرد به ساختار ، محموله ، سیستم هدایت و پیشرانه طبقه بندی شده اند. گروه بندی های احتمالی دیگری نیز وجود دارد.
به منظور تعیین وزن و عملکرد پرواز ، مهندسان غالباً محموله ، سازه ، ساختار پیشرانه (نازل ، پمپ ها ، مخازن و غیره) و راهنمایی ها را در یک پارامتر وزن خالی گروه بندی می کنند.
سپس وزن پیشرانه باقیمانده به تنها عاملی تبدیل می شود که با تعیین عملکرد موشک با زمان تغییر می کند.
یک وسیله نقلیه پرتابگر تصویر خوبی از قانون سوم حرکت نیوتن است ، "برای هر عملی ، یک واکنش برابر و مخالف وجود دارد." در مورد یک وسیله نقلیه پرتاب ، "عمل" عبارت است از جریان خروجی گازهای خروجی از عقب وسیله نقلیه حاصل از احتراق سوخت خودرو در موتور موشک آن ، و "واکنش" فشار است ، رانش نامیده می شود ، به ساختار داخلی وسیله نقلیه پرتاب اعمال می شود که آن را به سمت مخالف جریان خروجی سوق می دهد. برخلاف موتورهای جت ، که با همان اصل واکنش واکنش عمل می کنند اما اکسیژن مورد نیاز برای سوزاندن سوخت خود را از اتمسفر به دست می آورند ، موشک ها عامل اکسیداسیون خود را با خود حمل می کنند. به این ترتیب ، آنها می توانند در خلا فراتر از جو کار کنند.
هدف اصلی طراحان وسیله نقلیه پرتاب به حداکثر رساندن توانایی بلند کردن وسیله نقلیه در عین حال تأمین سطح اطمینان کافی با هزینه قابل قبول است. دستیابی به تعادل در بین این سه عامل چالش برانگیز است. برای اینکه خودروی پرتابگر از زمین بلند شود ، رانش به سمت بالا باید از وزن ترکیبی محموله فضاپیما ، پیشرانه های خودرو و ساختار آن بیشتر باشد. این امر باعث می شود که ساختار مکانیکی ، مخازن سوخت و موتورهای موشکی تا حد ممکن سبک اما به اندازه کافی قوی باشد تا بتواند در برابر نیروها و تنش های مرتبط با شتاب سریع از طریق جو مقاوم ، مقاومت کند. غالباً ، پیشرانه 80 درصد یا بیشتر از وزن كل ترکیب وسیله نقلیه و فضاپیمای پرتاب قبل از پرتاب را تشکیل می دهد.
یک وسیله نقلیه مخصوص پرتاب می تواند بسته به ماموریت و وزن فضاپیمای مورد نظر ، از چند طریق مختلف پیکربندی شود. این تنظیم مجدد را می توان با افزودن تعداد متفاوتی از تقویت کننده های تسمه ای ، معمولاً موتورهای راکتی جامد ، به مرحله اول خودرو یا با استفاده از مراحل مختلف بالایی انجام داد.
محافظت از بار
سفینه ای که وسیله نقلیه پرتابی به فضا حمل می کند تقریباً همیشه به قسمت بالای خودرو متصل است. در حین انتقال اتمسفر ، محموله با نوعی پرینت محافظت می شود که اغلب از مواد کامپوزیتی سبک ساخته می شود . هنگامی که وسیله پرتاب فراتر از متراکم ترین قسمت جو است ، این نمایشگاه از بین می رود. بعد از اینکه فضاپیما به سرعت اولیه مداری رسید، ممکن است برای شروع ماموریت خود ، از مرحله بالایی نهایی خودرو پرتاب جدا شود. متناوباً ، اگر قرار باشد فضاپیما به غیر از مدار کم زمین قرار بگیرد ، موتور موشکی مرحله بالا ممکن است برای مدتی خاموش شود زیرا بار فضاپیما در مدار قرار دارد. سپس موتور مجدداً راه اندازی می شود تا سرعت اضافی مورد نیاز برای انتقال محموله به مدار زمین بالاتر یا تزریق آن به مسیری كه آن را به اعماق فضا می برد ، منتقل شود.
پیمایش ، راهنمایی و کنترل
برای اینکه یک وسیله نقلیه بتواند یک فضاپیما را در مدار مورد نظر قرار دهد ، باید از قابلیت ناوبری ، هدایت و کنترل برخوردار باشد. جهت تعیین موقعیت ، سرعت و جهت گیری وسیله نقلیه در هر نقطه از مسیر حرکت به ناوبری نیاز است. همانطور که این متغیرها اندازه گیری می شوند ، سیستم هدایت وسیله نقلیه تعیین می کند که برای هدایت خودرو به سمت هدف مورد نظر چه اصلاحاتی لازم است. از سیستم های کنترلی برای اجرای دستورات راهنمایی از طریق حرکت موتورهای موشکی خودرو یا تغییر جهت رانش خودرو استفاده می شود. پیمایش ، راهنمایی و کنترل در بیشتر وسایل پرتاب با ترکیبی از نرم افزارهای پیچیده ، رایانه ها و سایر دستگاه های سخت افزاری حاصل می شود.
قابلیت اطمینان
یک وسیله پرتاب بنابراین تشکیل می شودیک یا چند موتور موشک ؛ سوخت برای موتورهایی که در مخازن سوخت حمل می شوند. سیستم های هدایت ، ناوبری و کنترل ؛ یک محموله و سازه ای که همه این عناصر را در خود جای داده است و ممکن است موتورهای اضافی برای افزایش بالابر به آن متصل شوند. همچنین پیوست های مختلفی بین وسیله نقلیه پرتابگر و صفحه پرتاب آن و ساختارهای مرتبط وجود دارد. یک وسیله نقلیه پرتاب مصرفی فقط یک فرصت برای انجام موفقیت آمیز مأموریت خود دارد ، بنابراین تمام عناصر آن باید دقیقاً و برای قابلیت اطمینان عملیاتی بسیار بالا طراحی و تولید شوند. همچنین ، همانطور که در بالا ذکر شد ، وسایل نقلیه پرتاب به گونه ای طراحی شده اند که تا حد ممکن سبک باشند تا بتوانند حداکثر قابلیت بالابری را داشته باشند. در نتیجه ، هر قسمت از یک وسیله نقلیه پرتاب در هنگام پرتاب نزدیک به نقطه شکست خود کار می کند ، زیرا خودرو تحت فشارهای ناشی از شتاب گرفتن از گذشته قرار می گیردسرعت صدا و انتقال جو و موتورهای موشکی آن تحت فشار ، دما ، شوک و لرزش کار می کنند.
نتیجه نهایی این است که پرتاب یک فضاپیما به فضای بیرونی کاری بسیار دشوار است و شکست های پرتاب یک واقعیت زندگی برای کسانی است که به دنبال دسترسی به فضا هستند. بسیاری از پرتاب های فضایی ، به ویژه آنهایی که فضاپیماهای تجاری را حمل می کنند ، در برابر خرابی بیمه می شوند ، زیرا غالباً سرمایه گذاری بیش از صد میلیون دلار است.
وسایل نقلیه پرتابی که مردم را به فضا منتقل می کنند "دارای رتبه انسانی" هستند. این به این معنی است که آنها از اجزای بالاترین قابلیت اطمینان استفاده می کنند ، در سیستم های حیاتی دارای افزونگی هستند ، قبل از پرتاب آزمایش بیشتری نسبت به وسایل نقلیه پرتاب کننده حامل یک فضاپیمای خودکار انجام می دهند و حاوی سیستم هایی هستند که در مورد مشکلات قریب الوقوع هشدار می دهند تا خدمه قادر به فرار از تصادف تنها یک خرابی یک وسیله نقلیه پرتاب در هنگام بلند شدن هواپیما بوده است که منجر به کشته شدن خدمه شده است این انفجار چلنجر در 28 ژانویه 1986 بود که باعث کشته شدن هر هفت فضانورد داخل هواپیما شد.پرتاب به فضا
اگرچه آنها در بسیاری از جزئیات برای وسایل نقلیه مختلف و پایگاههای مختلف پرتاب متفاوت هستند ، اما مراحل لازم برای آماده سازی یک وسیله نقلیه پرتابگر و میزان بار فضاپیمای آن برای پرتاب ، به طور کلی مشابه است.
اغلب اوقات ، مراحل مختلف و سایر عناصر یک وسیله نقلیه پرتاب به طور جداگانه ساخته می شوند و برای مونتاژ به پایگاه پرتاب حمل می شوند. آن مونتاژ می تواند در تاسیساتی دور از صفحه پرتاب یا در صفحه پرتاب واقع شود. مزیت ساختمان مونتاژ جداگانه این است که بسیاری از مراحل لازم برای آماده سازی خودرو برای پرتاب ، از جمله مونتاژ و سپس تسویه حساب یکپارچه ، در یک محیط بسته قابل انجام است . این همچنین بدان معنی است که صفحه پرتاب برای استفاده های دیگر در طول دوره مونتاژ و پرداخت در دسترس است.
مونتاژ وسایل نقلیه پرتاب یا به صورت عمودی یا افقی انجام می شود. مونتاژ عمودی به تاسیساتی به قدری بلند است که بتواند کل وسیله نقلیه و فضاپیما را در خود جای دهد . اجزای مختلف "انباشته" می شوند ، که از مرحله اول شروع می شوند و اغلب با اتصال فضاپیما به وسیله نقلیه پرتاب به پایان می رسند. (گاهی اوقات فضاپیما و وسیله نقلیه پرتابگر فقط در صفحه پرتاب جفت می شوند.) موتورهای راکت جامد تسمه ای ، اگر قرار است مورد استفاده قرار گیرند ، به مرحله اول هسته متصل می شوند. مونتاژ افقی به صورت انتها به انتها انجام می شود و نیازی به یک ساختمان بلند با دسترسی وسیله نقلیه در چند سطح ندارد. پس از مونتاژ ، تا آنجا که ممکن است آزمایش روی وسیله نقلیه یکپارچه انجام شود تا آمادگی آن برای پرتاب قبل از حمل و نقل به صفحه پرتاب بررسی شود.
هنگامی که به صفحه پرتاب رسید ، وسیله نقلیه به برج پرتاب متصل می شود ، که شامل اتصالات مختلف ناف و نقاط دسترسی است که برای تکمیل مراحل پرداخت و نظارت بر آمادگی نهایی خودرو برای پرتاب مورد نیاز است. اگر وسیله نقلیه به صورت افقی مونتاژ شده باشد ، باید با رسیدن به صفحه پرتاب به حالت عمودی درآید. غالباً صفحه پرتاب شامل نوعی سرپناه برای محافظت از وسیله نقلیه پرتابگر و فضاپیما از عناصر تا نزدیک به زمان پرتاب است و به تکنسین ها اجازه می دهد روند پرداخت را ادامه دهند. وسیله نقلیه پرتابی توسط نوعی وسیله اتصال دهنده روی بالشتک نگه داشته می شود.
اگر وسیله پرتاب روی صفحه پرتاب مونتاژ شود ، تمام مراحل فوق در آنجا انجام می شود. مونتاژ و پرداخت ممکن است چندین ماه طول بکشد و در این مدت صفحه پرتاب نمی تواند برای اهداف دیگر استفاده شود.
با نزدیک شدن به زمان پرتاب ، شمارش معکوس آغاز می شود. زمان شمارش معکوس می تواند از ساعاتی تا چند روز باشد. در هنگام شمارش معکوس ، مراحل نهایی مختلفی در زمان های مشخص انجام می شود تا خودرو برای پرتاب آماده شود. اگر وسیله نقلیه از پیشرانه های مایع استفاده کند ، پس از ذخیره شدن در مخازن نزدیک صفحه پرتاب ، آنها ساعاتی قبل از پرتاب بارگیری می شوند. نگهداری پیشرانه های برودتی در حالت مایع دشوار است. آنها تمایل به گاز شدن و "جوشاندن" وسیله نقلیه دارند. بنابراین ، آنها در مخازن سوخت خودرو تا حد امکان نزدیک به زمان پرتاب بارگیری می شوند و باید اطمینان حاصل شود که مخازن سوخت و اکسید کننده پر هستند. ساعاتی قبل از پرتاب برنامه ریزی شده ، سازه ای که از وسیله نقلیه محافظت کرده است از آن و برج پرتاب دور می شود.
پایگاه های راه اندازی باید به اطلاعات به روز آب و هوا دسترسی داشته باشند. معمولاً قوانینی از پیش تعیین شده در مورد شرایط آب و هوایی قابل قبول برای پرتاب فضایی وجود دارد ، از جمله وزش باد در محل پرتاب و از سطح بالا ، دید (برای نظارت بر وسیله نقلیه در چند دقیقه اول پرواز) و دما. این شرایط در سایتهای پرتاب و در وسایل نقلیه مختلف پرتاب متفاوت است. به عنوان مثال ، فضاپیمای خدمه ای از سایتهای روسی در شرایط بسیار جوی بسیار شدیدتر از آنچه برای پرتاب شاتل فضایی ایالات متحده از پایگاه پرتاب خود در فلوریدا قابل قبول است ، به فضا پرتاب می شود.
در چند دقیقه آخر شمارش معکوس ، بررسی نهایی انجام می شود تا اطمینان حاصل شود که وسیله نقلیه و فضاپیما برای پرتاب آماده هستند و سایر شرایط در وضعیت "رفتن" هستند. تمام اتصالات نافی بین برج پرتاب و خودرو جدا است. قبل از اینکه خودرو متعهد به پرتاب شود ، معمولاً موتورهای موشکی با سوخت مایع اجازه دارند چند ثانیه شلیک کنند. یک بررسی سریع رایانه ای انجام می شود و در صورت وجود نشانه هایی از مشکل ، موتورها می توانند خاموش شوند. پس از احتراق موتورهای راکتی جامد ، خودرو متعهد به پرتاب می شود. هنگامی که لحظه پرتاب فرا می رسد ، دستگاه هایی که وسیله نقلیه را به صفحه پرتاب نگه داشته اند ، به طور انفجاری جدا می شوند و وسیله نقلیه حرکت خود را آغاز می کند.
لانچ پد ها دارای ترانشه هایی برای انتقال شعله های خروجی از خودرو هستند و اغلب حجم زیادی از آب به شعله های آتش تزریق می شود. این کار برای به حداقل رساندن آسیب به وسیله نقلیه و صفحه پرتاب از گرما و ارتعاشات صوتی مرتبط با بلند شدن انجام می شود.
-
rohamavation
نام: roham hesami radرهام حسامی راد
محل اقامت: 100 مایلی شمال لندن جاده آیلستون، لستر، لسترشر. LE2
عضویت : سهشنبه ۱۳۹۹/۸/۲۰ - ۰۸:۳۴
پست: 3278-
سپاس: 5494
- جنسیت:
تماس:
Re: هوافضا
این تکنیک دو مزیت اصلی را ارائه می دهد: اول اینکه به موشک اجازه می دهد در مراحل اولیه صعود خود زاویه حمله بسیار کم یا حتی صفر را حفظ کند، به این معنی که موشک استرس آیرودینامیکی کمتری را تجربه می کند. مزیت دیگر این است که به موشک اجازه می دهد از جاذبه زمین برای تغییر جهت خود به جای سوخت خود استفاده کند. سوختی را که موشک در نتیجه صرفه جویی می کند می تواند برای شتاب افقی به منظور دستیابی به سرعت بالا و ورود آسانتر به مدار استفاده شود.
به طور خلاصه، یک موشک اگر بخواهد وارد مدار زمین شود، باید مسیر خود را پس از پرتاب منحنی کند. اگر این کار را نمیکرد و مستقیماً به سمت بالا ادامه میداد، در نهایت به نقطهای میرسید که سوختش تمام میشد و به احتمال زیاد، مانند یک سنگ به زمین بازمیگشت.
بعد از پرتاب و صعود مسافتی به سمت بالا موشک رو کج میکنن تا علاوه بر کسب سرعت توی راستای عمودی، توی راستای افقی هم سرعت کسب کنه. بنابراین اگه بعد از کج کردن موشک و کسب سرعت افقی، موتورهای موشک خاموش بشن، موشک یه مسیر سهمی شکل رو طی میکنه و مجدّداً به زمین بر میگرده. به این نوع پرواز میگن پرواز زیر-مداری
امّا گاهی هم نیاز هست موشک به مداری بالاتر بره. این کار شامل دو مرحله هست: اوّل توی راستای حرکت خودش موتورش رو روشن میکنه (نقطهی 1) تا مدارش از فرم دایرهی خارج بشه و به فرم بیضی در بیاد (رنگ قرمز)؛ چیزی که توی قسمت اوّل هم بهش اشاره شد. نقطهای که اقدام به این کار کرده تبدیل میشه به حضیض و نقطهی مقابلش هم اوج. این کار رو تا جایی ادامه میده که اوج اون بیضی برسه به ارتفاعی که قصد داره توی اون باشه. بعد از اون، موتورها رو خاموش میکنه و منتظر مرحلهی دوّم باقی میمونه. مرحلهی دوّم زمانی آغاز میشه که موشک به نقطهی اوج اون بیضی برسه (نقطهی 2). اونجا مجدّداً موتورها رو توی راستای حرکت روشن میکنه تا ارتفاع نقطهی حضیض رو افزایش بده و بیضی رو تبدیل به دایره کنه (رنگ مشکی). حالا دقیقاً توی مدار مورد نظر قرار گرفته.
برای رفتن به مدارهای پایینتر هم دقیقاً عکس همین کار رو انجام میده. اوّل موتورها رو خلاف جهت حرکت روشن میکنه تا سرعتش کمتر بشه (دقیقاً داره ترمز میکنه یا به بیان دیگه، خلاف جهت حرکت گاز میده!) و مدارش از دایره به بیضی تبدیل بشه و این کار رو تا جایی ادامه میده که نقطهی حضیض بیضی که اون سمت مدار هم قرار داره، برسه به مدار مورد نظر. بعد موتورها رو خاموش میکنه، صبر میکنه تا به حضیض برسه و باز موتورها رو خلاف جهت حرکت روشن میکنه تا ارتفاع نقطهی اوج رو هم کاهش بده و مجدّداً بیضی رو به دایره تبدیل کنه.
هر چیزی (نه تنها شاتل های فضایی) که به مدار زمین می رود باید مسیر خود را در مسیر صعود منحنی کند. اگر وسیله نقلیه مستقیماً به سمت بالا می رفت و به سرعت فرار نمی رسید، پس از تمام شدن سوخت به زمین برمی گشت.
هدف اصلی موتور موشک تنها رساندن محموله به بالای جو نیست، بلکه مهمتر از آن شتاب دادن آن در جهت افقی تا سرعت مداری (7.5 کیلومتر بر ثانیه برای ارتفاعات مداری شاتل و ایستگاه فضایی بینالمللی) است. به همین دلیل است که همه موشک ها / شاتل ها مسیر خود را به تدریج به سمت افقی منحنی می کنند و سپس سوخت زیادی را در جهت افقی می سوزانند. اگر محموله به سرعت افقی کافی نمی رسید، دوباره به زمین سقوط می کرد.سوال اصلی که می بینم این است که آیا شاتل می خواهد به یک زاویه غیر عمودی بپیچد؟ البته منظور من از "شاتل" مهندسانی است که آن را طراحی می کنند. و منظور من از مهندسان، واقعیت ریاضی است. به طور خلاصه، اگر مسیر شما تا حدودی کج شود، آیا سوخت کمتری می سوزانید؟ ما فکر می کنیم که پاسخ "بله" است، اما توجیه آن آسان نیست. همچنین مشخص نیست که انگیزه چیست. اگر جو وجود نداشت، ما ترجیح میدهیم در واقع به صورت افقی پرتاب کنیم.
یکی از راههای پاسخ به این سوال، استفاده از روشهای عددی برای تبدیل مشکل به یک راهحل است. یک تابع "امتیاز" با شاخص شایستگی ایجاد کنید، و سپس مسیر را تغییر دهید تا بهترین ارزش را بدست آورید. از نظر عددی، احتمالاً میتوانید این کار را با حدس زدن برخی از مسیرهای اولیه و سپس استفاده از ژاکوبین و هسین محاسبهشده برای نزدیکترین نقطه بحرانی، جایی که رقم شایستگی (امیدوارم) در حداقل محلی است، انجام دهید.
بنابراین برای شبیه سازی، در اینجا برخی از مواردی که در نظر گرفته ام وجود دارد:
نیروی رانش موتورها به 3g می رسد و این ثابت است
گرانش زمین آن را به سمت پایین می کشد
کشش اتمسفر از معادله درگ پیروی می کند و من از پارامترهای جرم و قطر Falcon9 استفاده کردم
بردار حالت زوایایی را نشان می دهد که رانش در آن اعمال می شود، نسبت به عمودی
یک روش ساده rk4 برای ادغام این مدل با توجه به کنترل خاصی استفاده می شود
در پایان شبیه سازی، یک عدد از تابع شایستگی امتیاز خود را محاسبه می کند. اینها خودسرانه انتخاب می شوند تا به نتیجه ای که می خواهیم برسیم.
ایده این است که یک برنامه بهینه ساز بهترین ترکیب از این سه را با کمترین قیمت برای شما پیدا کند. این چیزی است که من از نظر زاویه اعمال رانش به دست آوردم. این نسبت به عمودی است، به این معنا که 0 درجه اعمال نیروی رانش مستقیم به بالا است. توجه داشته باشید که رانش و سرعت همیشه در یک جهت نیستند. این نشان دهنده "بهترین" روش برای زاویه دادن به موشک برای دستیابی به بهترین عملکرد است.
زوایای رانش
این نوع روش اغلب با آن مشکل دارد. بسیاری از رفتار "هری" در آنجا احتمالاً به دلیل خطاهای مدل به عنوان مشکلات در محاسبات مشتق و سایر انواع مصنوعات است. شبیه سازی بیش از 500 بازه اجرا می شود ... و 17 متغیر مستقل وجود دارد که مشتق دوم سیستم را برای آنها تعیین می کند. از آنجایی که از نظر تعریف نزدیک به نقطه بحرانی است، رقم شایستگی به این متغیرها بسیار حساس است و می تواند مشکلاتی را ایجاد کند.
با این وجود، آنچه را که من میخواستم نشان میدهد - مسیر بهینه به وضوح یک مسیر غیرعمودی نزدیک سطح را دنبال میکند. FYI، زاویه اولیه در اینجا حدود 27 درجه نسبت به عمودی است. من انتظار دارم که سناریوهای دنیای واقعی از اعدادی استفاده کنند که تا حدودی نزدیک به این هستند.
از نظر ریاضی، این یک توجیه نسبتاً دقیق برای زاویه ای است که موشک ها پس از دور شدن از سکو پرواز می کنند. در واقع، شیب دادن خود سکوی پرتاب بهینه تر است. از نظر لجستیکی، این ایده واقعا بد به نظر می رسد. بنابراین مهندسان با چرخش به زاویه بهینه پس از پاکسازی سکوی پرتاب سازش می کنند.
موشک ها با بالا رفتن مستقیم شروع می شوند، اما به تدریج شروع به انحنا به سمت یک نگرش افقی می کنند. این "چرخش گرانشی" نامیده می شود. بیشتر انرژی صرف شده توسط موشک برای به دست آوردن سرعت به سمت شرق استفاده می شود: باید حدود 18000 مایل در ساعت (27000 کیلومتر در ساعت) در حدود 200 مایل بالاتر از سطح حرکت کند.پاسخ: اگر یک موشک مستقیماً به سمت بالا پرواز می کرد، پس از تمام شدن سوخت، دوباره به زمین سقوط می کرد! راکت ها باید در حین حرکت به سمت آسمان برای رسیدن به مدار یا یک مسیر دایره ای حرکت به دور زمین به سمتی کج شوند.راکت ها باید در حین حرکت به سمت آسمان برای رسیدن به مدار یا یک مسیر حرکت دایره ای در اطراف زمین، به طرفین کج شوند. این تکنیک هدایت به عنوان چرخش گرانشی شناخته می شود که از گرانش زمین برای کمک به حفظ سوخت موشک و به حداقل رساندن استرس و فشار وارد بر فضاپیما استفاده می کند.
چرا پرتاب به شرق منجر به شیب مداری برابر با عرض جغرافیایی سایت پرتاب می شود؟مرکز زمین، برای هر تقریب منطقی، در یکی از نقاط کانونی یک مدار بیضی شکل است. برای یک مدار دایره ای، تنها یک نقطه کانونی وجود دارد، بنابراین مرکز زمین در مرکز مدار قرار دارد.
نابراین، صفحه مدار هم مرکز زمین و هم محل پرتاب را قطع می کند.
اگر محل پرتاب در خط استوا بود، تصور این که اگر دقیقاً به مقصد شرق، یعنی مماس بر مدار هدف، پرتاب می کنید، دشوار نیست، صفحه مداری با صفحه استوایی منطبق است، بنابراین میل مداری شما با عرض جغرافیایی محل پرتاب شما برابر است. : 0 درجه اما با دور شدن مکان پرتاب شما از معادله، صفحه مداری شما با همان مقدار عرض جغرافیایی شروع به کج شدن می کند، زیرا باید تقاطع را حفظ کنید:
شماتیک شیب مداری
شیب مداری شیب مدار یک جسم به دور یک جرم آسمانی را اندازه گیری می کند. به عنوان زاویه بین صفحه مرجع و صفحه مداری یا محور جهت جسم در حال گردش بیان می شود.
برای ماهوارهای که مستقیماً بالای استوا به دور زمین میچرخد، صفحه مدار ماهواره با صفحه استوای زمین یکسان است و شیب مداری ماهواره 0 درجه است. حالت کلی برای مدار دایره ای این است که این مدار کج است و نیمی از مدار را بر روی نیمکره شمالی و نیمی را بر روی نیمکره جنوبی می گذراند. اگر مدار بین 20 درجه عرض شمالی و 20 درجه عرض جغرافیایی جنوبی نوسان داشته باشد، آنگاه میل مداری آن 20 درجه خواهد بود.شیب یکی از شش عنصر مداری است که شکل و جهت یک مدار آسمانی را توصیف می کند. این زاویه بین صفحه مداری و صفحه مرجع است که معمولاً بر حسب درجه بیان می شود. برای ماهواره ای که به دور یک سیاره می چرخد، صفحه مرجع معمولاً صفحه ای است که استوای سیاره را در بر می گیرد. برای سیارات منظومه شمسی، صفحه مرجع معمولاً دایره البروج است، صفحه ای که در آن زمین به دور خورشید می چرخد. این هواپیمای مرجع برای ناظران زمینی بسیار کاربردی است. بنابراین، شیب زمین، طبق تعریف، صفر است.ما مشکل داریم. در مقایسه با فاصله بین سیارات و زمان محدودی که می خواهیم برای سفر استفاده کنیم، موشک های ما واقعاً ضعیف و ضعیف هستند. برای وارد شدن به مدار زمین، انرژی زیادی لازم است. سپس انرژی زیادی لازم است تا از مدار زمین خارج شود و به دور خورشید بچرخد. و سپس انرژی بسیار بیشتری برای بلند کردن (یا رها کردن) مدار ما برای مطابقت با سیاره دیگر نیاز است. سپس ما باید انرژی بیشتری را برای قرار گرفتن در مدار سیاره مورد نظر مصرف کنیم، و همچنان بیشتر برای فرود آمدن.
پس باید راهی برویم که کمترین انرژی را می گیرد. و آن این است که از موتورهای موشکی خود برای شتاب دادن به وسیله نقلیه برای قرار گرفتن در مداری بیضوی استفاده کنیم، مداری که از موقعیت فعلی ما می گذرد و وقتی به آنجا می رسیم سیاره در کجا قرار خواهد گرفت. گاهی اوقات به این نوع مدار، مدار انتقال می گویند. بعد از اینکه از موتورهای خود برای ورود به مدار انتقال استفاده کردیم، میتوانیم آنها را خاموش کنیم و تا زمانی که به سیاره مورد نظر نزدیک شویم، در کنار آن حرکت کنیم. سپس دوباره از موتورها برای قرار گرفتن در مدار سیاره و بعداً برای فرود استفاده خواهیم کرد.
بنابراین برای پاسخ به سوال شما
ما در حال حاضر نمی توانیم در خط مستقیمی که شما ترسیم می کنید برویم، زیرا موتورهای موشکی نداریم که به اندازه کافی قدرتمند باشند. اما همچنین، مسیر مستقیم بیهوده خواهد بود. و در نهایت، حتی با وجود موتورهایی که می توانند در تمام مسیر آتش بزنند، سریع ترین مسیر در واقع یک خط تنگه نخواهد بود. اما این توضیح واقعا طولانی خواهد بود
به طور خلاصه، یک موشک اگر بخواهد وارد مدار زمین شود، باید مسیر خود را پس از پرتاب منحنی کند. اگر این کار را نمیکرد و مستقیماً به سمت بالا ادامه میداد، در نهایت به نقطهای میرسید که سوختش تمام میشد و به احتمال زیاد، مانند یک سنگ به زمین بازمیگشت.
بعد از پرتاب و صعود مسافتی به سمت بالا موشک رو کج میکنن تا علاوه بر کسب سرعت توی راستای عمودی، توی راستای افقی هم سرعت کسب کنه. بنابراین اگه بعد از کج کردن موشک و کسب سرعت افقی، موتورهای موشک خاموش بشن، موشک یه مسیر سهمی شکل رو طی میکنه و مجدّداً به زمین بر میگرده. به این نوع پرواز میگن پرواز زیر-مداری
امّا گاهی هم نیاز هست موشک به مداری بالاتر بره. این کار شامل دو مرحله هست: اوّل توی راستای حرکت خودش موتورش رو روشن میکنه (نقطهی 1) تا مدارش از فرم دایرهی خارج بشه و به فرم بیضی در بیاد (رنگ قرمز)؛ چیزی که توی قسمت اوّل هم بهش اشاره شد. نقطهای که اقدام به این کار کرده تبدیل میشه به حضیض و نقطهی مقابلش هم اوج. این کار رو تا جایی ادامه میده که اوج اون بیضی برسه به ارتفاعی که قصد داره توی اون باشه. بعد از اون، موتورها رو خاموش میکنه و منتظر مرحلهی دوّم باقی میمونه. مرحلهی دوّم زمانی آغاز میشه که موشک به نقطهی اوج اون بیضی برسه (نقطهی 2). اونجا مجدّداً موتورها رو توی راستای حرکت روشن میکنه تا ارتفاع نقطهی حضیض رو افزایش بده و بیضی رو تبدیل به دایره کنه (رنگ مشکی). حالا دقیقاً توی مدار مورد نظر قرار گرفته.
برای رفتن به مدارهای پایینتر هم دقیقاً عکس همین کار رو انجام میده. اوّل موتورها رو خلاف جهت حرکت روشن میکنه تا سرعتش کمتر بشه (دقیقاً داره ترمز میکنه یا به بیان دیگه، خلاف جهت حرکت گاز میده!) و مدارش از دایره به بیضی تبدیل بشه و این کار رو تا جایی ادامه میده که نقطهی حضیض بیضی که اون سمت مدار هم قرار داره، برسه به مدار مورد نظر. بعد موتورها رو خاموش میکنه، صبر میکنه تا به حضیض برسه و باز موتورها رو خلاف جهت حرکت روشن میکنه تا ارتفاع نقطهی اوج رو هم کاهش بده و مجدّداً بیضی رو به دایره تبدیل کنه.
هر چیزی (نه تنها شاتل های فضایی) که به مدار زمین می رود باید مسیر خود را در مسیر صعود منحنی کند. اگر وسیله نقلیه مستقیماً به سمت بالا می رفت و به سرعت فرار نمی رسید، پس از تمام شدن سوخت به زمین برمی گشت.
هدف اصلی موتور موشک تنها رساندن محموله به بالای جو نیست، بلکه مهمتر از آن شتاب دادن آن در جهت افقی تا سرعت مداری (7.5 کیلومتر بر ثانیه برای ارتفاعات مداری شاتل و ایستگاه فضایی بینالمللی) است. به همین دلیل است که همه موشک ها / شاتل ها مسیر خود را به تدریج به سمت افقی منحنی می کنند و سپس سوخت زیادی را در جهت افقی می سوزانند. اگر محموله به سرعت افقی کافی نمی رسید، دوباره به زمین سقوط می کرد.سوال اصلی که می بینم این است که آیا شاتل می خواهد به یک زاویه غیر عمودی بپیچد؟ البته منظور من از "شاتل" مهندسانی است که آن را طراحی می کنند. و منظور من از مهندسان، واقعیت ریاضی است. به طور خلاصه، اگر مسیر شما تا حدودی کج شود، آیا سوخت کمتری می سوزانید؟ ما فکر می کنیم که پاسخ "بله" است، اما توجیه آن آسان نیست. همچنین مشخص نیست که انگیزه چیست. اگر جو وجود نداشت، ما ترجیح میدهیم در واقع به صورت افقی پرتاب کنیم.
یکی از راههای پاسخ به این سوال، استفاده از روشهای عددی برای تبدیل مشکل به یک راهحل است. یک تابع "امتیاز" با شاخص شایستگی ایجاد کنید، و سپس مسیر را تغییر دهید تا بهترین ارزش را بدست آورید. از نظر عددی، احتمالاً میتوانید این کار را با حدس زدن برخی از مسیرهای اولیه و سپس استفاده از ژاکوبین و هسین محاسبهشده برای نزدیکترین نقطه بحرانی، جایی که رقم شایستگی (امیدوارم) در حداقل محلی است، انجام دهید.
بنابراین برای شبیه سازی، در اینجا برخی از مواردی که در نظر گرفته ام وجود دارد:
نیروی رانش موتورها به 3g می رسد و این ثابت است
گرانش زمین آن را به سمت پایین می کشد
کشش اتمسفر از معادله درگ پیروی می کند و من از پارامترهای جرم و قطر Falcon9 استفاده کردم
بردار حالت زوایایی را نشان می دهد که رانش در آن اعمال می شود، نسبت به عمودی
یک روش ساده rk4 برای ادغام این مدل با توجه به کنترل خاصی استفاده می شود
در پایان شبیه سازی، یک عدد از تابع شایستگی امتیاز خود را محاسبه می کند. اینها خودسرانه انتخاب می شوند تا به نتیجه ای که می خواهیم برسیم.
ایده این است که یک برنامه بهینه ساز بهترین ترکیب از این سه را با کمترین قیمت برای شما پیدا کند. این چیزی است که من از نظر زاویه اعمال رانش به دست آوردم. این نسبت به عمودی است، به این معنا که 0 درجه اعمال نیروی رانش مستقیم به بالا است. توجه داشته باشید که رانش و سرعت همیشه در یک جهت نیستند. این نشان دهنده "بهترین" روش برای زاویه دادن به موشک برای دستیابی به بهترین عملکرد است.
زوایای رانش
این نوع روش اغلب با آن مشکل دارد. بسیاری از رفتار "هری" در آنجا احتمالاً به دلیل خطاهای مدل به عنوان مشکلات در محاسبات مشتق و سایر انواع مصنوعات است. شبیه سازی بیش از 500 بازه اجرا می شود ... و 17 متغیر مستقل وجود دارد که مشتق دوم سیستم را برای آنها تعیین می کند. از آنجایی که از نظر تعریف نزدیک به نقطه بحرانی است، رقم شایستگی به این متغیرها بسیار حساس است و می تواند مشکلاتی را ایجاد کند.
با این وجود، آنچه را که من میخواستم نشان میدهد - مسیر بهینه به وضوح یک مسیر غیرعمودی نزدیک سطح را دنبال میکند. FYI، زاویه اولیه در اینجا حدود 27 درجه نسبت به عمودی است. من انتظار دارم که سناریوهای دنیای واقعی از اعدادی استفاده کنند که تا حدودی نزدیک به این هستند.
از نظر ریاضی، این یک توجیه نسبتاً دقیق برای زاویه ای است که موشک ها پس از دور شدن از سکو پرواز می کنند. در واقع، شیب دادن خود سکوی پرتاب بهینه تر است. از نظر لجستیکی، این ایده واقعا بد به نظر می رسد. بنابراین مهندسان با چرخش به زاویه بهینه پس از پاکسازی سکوی پرتاب سازش می کنند.
موشک ها با بالا رفتن مستقیم شروع می شوند، اما به تدریج شروع به انحنا به سمت یک نگرش افقی می کنند. این "چرخش گرانشی" نامیده می شود. بیشتر انرژی صرف شده توسط موشک برای به دست آوردن سرعت به سمت شرق استفاده می شود: باید حدود 18000 مایل در ساعت (27000 کیلومتر در ساعت) در حدود 200 مایل بالاتر از سطح حرکت کند.پاسخ: اگر یک موشک مستقیماً به سمت بالا پرواز می کرد، پس از تمام شدن سوخت، دوباره به زمین سقوط می کرد! راکت ها باید در حین حرکت به سمت آسمان برای رسیدن به مدار یا یک مسیر دایره ای حرکت به دور زمین به سمتی کج شوند.راکت ها باید در حین حرکت به سمت آسمان برای رسیدن به مدار یا یک مسیر حرکت دایره ای در اطراف زمین، به طرفین کج شوند. این تکنیک هدایت به عنوان چرخش گرانشی شناخته می شود که از گرانش زمین برای کمک به حفظ سوخت موشک و به حداقل رساندن استرس و فشار وارد بر فضاپیما استفاده می کند.
چرا پرتاب به شرق منجر به شیب مداری برابر با عرض جغرافیایی سایت پرتاب می شود؟مرکز زمین، برای هر تقریب منطقی، در یکی از نقاط کانونی یک مدار بیضی شکل است. برای یک مدار دایره ای، تنها یک نقطه کانونی وجود دارد، بنابراین مرکز زمین در مرکز مدار قرار دارد.
نابراین، صفحه مدار هم مرکز زمین و هم محل پرتاب را قطع می کند.
اگر محل پرتاب در خط استوا بود، تصور این که اگر دقیقاً به مقصد شرق، یعنی مماس بر مدار هدف، پرتاب می کنید، دشوار نیست، صفحه مداری با صفحه استوایی منطبق است، بنابراین میل مداری شما با عرض جغرافیایی محل پرتاب شما برابر است. : 0 درجه اما با دور شدن مکان پرتاب شما از معادله، صفحه مداری شما با همان مقدار عرض جغرافیایی شروع به کج شدن می کند، زیرا باید تقاطع را حفظ کنید:
شماتیک شیب مداری
شیب مداری شیب مدار یک جسم به دور یک جرم آسمانی را اندازه گیری می کند. به عنوان زاویه بین صفحه مرجع و صفحه مداری یا محور جهت جسم در حال گردش بیان می شود.
برای ماهوارهای که مستقیماً بالای استوا به دور زمین میچرخد، صفحه مدار ماهواره با صفحه استوای زمین یکسان است و شیب مداری ماهواره 0 درجه است. حالت کلی برای مدار دایره ای این است که این مدار کج است و نیمی از مدار را بر روی نیمکره شمالی و نیمی را بر روی نیمکره جنوبی می گذراند. اگر مدار بین 20 درجه عرض شمالی و 20 درجه عرض جغرافیایی جنوبی نوسان داشته باشد، آنگاه میل مداری آن 20 درجه خواهد بود.شیب یکی از شش عنصر مداری است که شکل و جهت یک مدار آسمانی را توصیف می کند. این زاویه بین صفحه مداری و صفحه مرجع است که معمولاً بر حسب درجه بیان می شود. برای ماهواره ای که به دور یک سیاره می چرخد، صفحه مرجع معمولاً صفحه ای است که استوای سیاره را در بر می گیرد. برای سیارات منظومه شمسی، صفحه مرجع معمولاً دایره البروج است، صفحه ای که در آن زمین به دور خورشید می چرخد. این هواپیمای مرجع برای ناظران زمینی بسیار کاربردی است. بنابراین، شیب زمین، طبق تعریف، صفر است.ما مشکل داریم. در مقایسه با فاصله بین سیارات و زمان محدودی که می خواهیم برای سفر استفاده کنیم، موشک های ما واقعاً ضعیف و ضعیف هستند. برای وارد شدن به مدار زمین، انرژی زیادی لازم است. سپس انرژی زیادی لازم است تا از مدار زمین خارج شود و به دور خورشید بچرخد. و سپس انرژی بسیار بیشتری برای بلند کردن (یا رها کردن) مدار ما برای مطابقت با سیاره دیگر نیاز است. سپس ما باید انرژی بیشتری را برای قرار گرفتن در مدار سیاره مورد نظر مصرف کنیم، و همچنان بیشتر برای فرود آمدن.
پس باید راهی برویم که کمترین انرژی را می گیرد. و آن این است که از موتورهای موشکی خود برای شتاب دادن به وسیله نقلیه برای قرار گرفتن در مداری بیضوی استفاده کنیم، مداری که از موقعیت فعلی ما می گذرد و وقتی به آنجا می رسیم سیاره در کجا قرار خواهد گرفت. گاهی اوقات به این نوع مدار، مدار انتقال می گویند. بعد از اینکه از موتورهای خود برای ورود به مدار انتقال استفاده کردیم، میتوانیم آنها را خاموش کنیم و تا زمانی که به سیاره مورد نظر نزدیک شویم، در کنار آن حرکت کنیم. سپس دوباره از موتورها برای قرار گرفتن در مدار سیاره و بعداً برای فرود استفاده خواهیم کرد.
بنابراین برای پاسخ به سوال شما
ما در حال حاضر نمی توانیم در خط مستقیمی که شما ترسیم می کنید برویم، زیرا موتورهای موشکی نداریم که به اندازه کافی قدرتمند باشند. اما همچنین، مسیر مستقیم بیهوده خواهد بود. و در نهایت، حتی با وجود موتورهایی که می توانند در تمام مسیر آتش بزنند، سریع ترین مسیر در واقع یک خط تنگه نخواهد بود. اما این توضیح واقعا طولانی خواهد بود
-
rohamavation
نام: roham hesami radرهام حسامی راد
محل اقامت: 100 مایلی شمال لندن جاده آیلستون، لستر، لسترشر. LE2
عضویت : سهشنبه ۱۳۹۹/۸/۲۰ - ۰۸:۳۴
پست: 3278-
سپاس: 5494
- جنسیت:
تماس:
Re: هوافضا
خوشه بندی موتور به معنای استفاده بیش از یک موتور همزمان است. خوشه بندی باعث افزایش سطح رانش و در نتیجه بالا بردن یا فشار آوردن تمام موتورهای مورد استفاده می شود. این روش را برای بلند کردن محموله های سنگین و راکت های بزرگ ، تکنیک خوبی می کند.
قدرتمندترین مدل موتورهای موشکی چیست؟
بزرگترین و قدرتمندترین موتور لیست شده در لیست ترکیبی موتورهای موشکی ترکیبی CAR / NAR / TRA Cesaroni O25000VM-P است. قطر این موتور قدرتمند تقریباً 5 اینچ ، طول 55 اینچ و وزن آن تقریباً 52 پوند است و پیشرانه 32 پوند از 52 را تشکیل می دهد.
خوشه ها معمولاً مرتب شده اند تا مرکز رانش را تا حد ممکن به خط مرکزی موشک نزدیک کنند تا در صورت اشتعال موتور ، رانش نامتقارن محدود شود. کلید هر چیدمان متقارن نگه داشتن رانش است. اگر سه موتور در یک مثلث چیده شده باشند ، همه باید منحنی رانش یکسانی داشته باشند در غیر این صورت موشک از مسیر خارج می شود. در یک خوشه مربعی چهار تایی ، می توان با قرار دادن موتورهای برابر در گوشه های مخالف ، با دو مجموعه از دو پرواز کرد. اگر یک موتور مرکزی وجود داشته باشد ، موتورهای دیگر می توانند در داخل بدنه اصلی قرار بگیرند ، همانطور که در شکل 2 نشان داده شده است ، یا می توانند به صورت غلاف های قایق یا "بند" متصل شوند. موتورهای قایق می توانند متفاوت از موتور مرکزی باشند ، به شرطی که موتورهای طرف مقابل خط مرکزی متعادل باشند. معمولاً قرار دادن یک موتور با رانش کم ، دارای رانش کم در مرکز و موتورهای با رانش بالا و کوتاه ، دارای یک سوزاندن کوتاه در خارج از کشور هستند.موتورهای خوشه ای معمولاً در لوله های جداگانه نصب موتور نصب می شوند که توسط حلقه های سانتریفوژ ثابت نگه داشته می شوند. از هر روشی که استفاده شود ، مهم است که فضاهای بین لوله ها مهر و موم شده باشد ، بنابراین فشار شارژ خروجی به بیرون نشت نمی کند. اگر موتور نصب نشده باشد (به عنوان مثال قایق های داخلی) ، قبل از پرواز باید این مناطق مهر و موم شده باشند. همه موتورها می توانند تاخیر یکسانی داشته باشند تا یکدیگر را تقویت کنند ، یا ممکن است برخی از آنها "وصل" شوند و پس از فرسودگی شغلی هیچ کاری انجام ندهند. اگر فقط بخشی از خوشه برای فعال سازی سیستم بازیابی استفاده شده است ، بیشتر مراقب باشید تا از احتراق آن موتورها مطمئن شوید. اگر همه موتورها به جز موتور باز کننده چتر باز شوند ، گران و شرم آور خواهد بود ، ناگفته نماند خطرناک است.دستگاه های جرقه زنی باید به طور موازی سیم کشی شوند ، به طوری که هنگامی که یک دستگاه جرقه زنی می سوزد ، همچنان جریان برق از طریق دیگران جریان دارد. اگر جرقه زنی ها در "سری" سیم کشی شوند ، وقتی یک جرقه زن می سوزد ، مدار خراب است. سیم کشی مناسب با پیچیدن یک سیم از هر جرقه به یکدیگر و ایجاد یک اتصال به راحتی انجام می شود ، سپس سیم های باقیمانده را با هم پیچیده تا اتصال دوم ایجاد شود.
احتراق های مورد استفاده در موتورهای خوشه ای باید قابل اطمینان باشند و نباید منبع تغذیه پرتاب را زیاد کنند. رساندن کل جریانی که اشتعال ها می توانند مصرف کنند ، جنبه مهمی از خوشه بندی موفقیت آمیز موتورهای کامپوزیت است. این امر به ویژه در مواردی که جرقه زنی های با جریان بالا در سیستم های پرتاب معمولی به کار گرفته می شوند ، صادق است. به عنوان مثال ، چهار جرقه زن جریان بالا که به طور موازی سیم کشی می شوند ، مانند Firestars ، می توانند بیش از 50 آمپر جریان را بکشند. اگر سیستم شما نتواند آن نوع نیرو را تحویل دهد ، نتایج می توانند به طور همزمان و به طور همزمان ، اشتعال های احتراق کنند.
کبریت های الکتریکی از جریان بسیار کمی برای اشتعال استفاده می کنند ، اما به تنهایی برای اشتعال قابل اطمینان موتور کامپوزیت کافی نیستند. یک راه حل این است که مسابقه الکتریکی را در پیروژن غوطه ور کنید که به راحتی توسط یک مسابقه الکتریکی مشتعل می شود. تطابق الکتریکی جرقه قابل اطمینان را فراهم می کند در حالی که پیروژن قدرت اشتعال را فراهم می کند. اگر قطر گلو موتور اجازه می دهد ، قبل از فرو رفتن در پیروژن ، بالای قسمت الکتریکی را تا بزنید. برای ایجاد قدرت حتی بیشتر ، می توان شاخه های کوچک پیشران Aerotech Blue Thunder را به هم متصل کرد و یا بر روی دستگاه جرقه زنی چسباند.Falcon Heavy ، سه هسته ای و 27 موتوره
آیا قانونی برای نزدیکی نازل موتور موشک از یکدیگر وجود دارد؟من تعجب می کنم آیا هیچ قانونی وجود دارد که چگونه می توانید نازل موتور را به یکدیگر نزدیک کنید. آیا هنگامی که دو یا چند شیپوره موتور را با هم مونتاژ می کنید محدودیت لرزش ، گرما و غیره وجود دارد؟
Saturn I دارای چهار موتور مرکزی بسیار نزدیک بود ، و موتورهای گیم بالینگ خارجی دورتر بودند. من می دانم که مواردفضاپیمایی در آنجا قرار داده شده بودند ، از جمله چیزهای دیگر ، برای ایجاد قدرت بهتر ، فشار دادن و غلتیدن. اما آیا محدودیت هایی برای کلاستر نازل موتور وجود دارد؟اما پارامترهای آنجا به مشخصات موتور بستگی دارد.بار گرما و تحمل ان
قدرتمندترین مدل موتورهای موشکی چیست؟
بزرگترین و قدرتمندترین موتور لیست شده در لیست ترکیبی موتورهای موشکی ترکیبی CAR / NAR / TRA Cesaroni O25000VM-P است. قطر این موتور قدرتمند تقریباً 5 اینچ ، طول 55 اینچ و وزن آن تقریباً 52 پوند است و پیشرانه 32 پوند از 52 را تشکیل می دهد.
خوشه ها معمولاً مرتب شده اند تا مرکز رانش را تا حد ممکن به خط مرکزی موشک نزدیک کنند تا در صورت اشتعال موتور ، رانش نامتقارن محدود شود. کلید هر چیدمان متقارن نگه داشتن رانش است. اگر سه موتور در یک مثلث چیده شده باشند ، همه باید منحنی رانش یکسانی داشته باشند در غیر این صورت موشک از مسیر خارج می شود. در یک خوشه مربعی چهار تایی ، می توان با قرار دادن موتورهای برابر در گوشه های مخالف ، با دو مجموعه از دو پرواز کرد. اگر یک موتور مرکزی وجود داشته باشد ، موتورهای دیگر می توانند در داخل بدنه اصلی قرار بگیرند ، همانطور که در شکل 2 نشان داده شده است ، یا می توانند به صورت غلاف های قایق یا "بند" متصل شوند. موتورهای قایق می توانند متفاوت از موتور مرکزی باشند ، به شرطی که موتورهای طرف مقابل خط مرکزی متعادل باشند. معمولاً قرار دادن یک موتور با رانش کم ، دارای رانش کم در مرکز و موتورهای با رانش بالا و کوتاه ، دارای یک سوزاندن کوتاه در خارج از کشور هستند.موتورهای خوشه ای معمولاً در لوله های جداگانه نصب موتور نصب می شوند که توسط حلقه های سانتریفوژ ثابت نگه داشته می شوند. از هر روشی که استفاده شود ، مهم است که فضاهای بین لوله ها مهر و موم شده باشد ، بنابراین فشار شارژ خروجی به بیرون نشت نمی کند. اگر موتور نصب نشده باشد (به عنوان مثال قایق های داخلی) ، قبل از پرواز باید این مناطق مهر و موم شده باشند. همه موتورها می توانند تاخیر یکسانی داشته باشند تا یکدیگر را تقویت کنند ، یا ممکن است برخی از آنها "وصل" شوند و پس از فرسودگی شغلی هیچ کاری انجام ندهند. اگر فقط بخشی از خوشه برای فعال سازی سیستم بازیابی استفاده شده است ، بیشتر مراقب باشید تا از احتراق آن موتورها مطمئن شوید. اگر همه موتورها به جز موتور باز کننده چتر باز شوند ، گران و شرم آور خواهد بود ، ناگفته نماند خطرناک است.دستگاه های جرقه زنی باید به طور موازی سیم کشی شوند ، به طوری که هنگامی که یک دستگاه جرقه زنی می سوزد ، همچنان جریان برق از طریق دیگران جریان دارد. اگر جرقه زنی ها در "سری" سیم کشی شوند ، وقتی یک جرقه زن می سوزد ، مدار خراب است. سیم کشی مناسب با پیچیدن یک سیم از هر جرقه به یکدیگر و ایجاد یک اتصال به راحتی انجام می شود ، سپس سیم های باقیمانده را با هم پیچیده تا اتصال دوم ایجاد شود.
احتراق های مورد استفاده در موتورهای خوشه ای باید قابل اطمینان باشند و نباید منبع تغذیه پرتاب را زیاد کنند. رساندن کل جریانی که اشتعال ها می توانند مصرف کنند ، جنبه مهمی از خوشه بندی موفقیت آمیز موتورهای کامپوزیت است. این امر به ویژه در مواردی که جرقه زنی های با جریان بالا در سیستم های پرتاب معمولی به کار گرفته می شوند ، صادق است. به عنوان مثال ، چهار جرقه زن جریان بالا که به طور موازی سیم کشی می شوند ، مانند Firestars ، می توانند بیش از 50 آمپر جریان را بکشند. اگر سیستم شما نتواند آن نوع نیرو را تحویل دهد ، نتایج می توانند به طور همزمان و به طور همزمان ، اشتعال های احتراق کنند.
کبریت های الکتریکی از جریان بسیار کمی برای اشتعال استفاده می کنند ، اما به تنهایی برای اشتعال قابل اطمینان موتور کامپوزیت کافی نیستند. یک راه حل این است که مسابقه الکتریکی را در پیروژن غوطه ور کنید که به راحتی توسط یک مسابقه الکتریکی مشتعل می شود. تطابق الکتریکی جرقه قابل اطمینان را فراهم می کند در حالی که پیروژن قدرت اشتعال را فراهم می کند. اگر قطر گلو موتور اجازه می دهد ، قبل از فرو رفتن در پیروژن ، بالای قسمت الکتریکی را تا بزنید. برای ایجاد قدرت حتی بیشتر ، می توان شاخه های کوچک پیشران Aerotech Blue Thunder را به هم متصل کرد و یا بر روی دستگاه جرقه زنی چسباند.Falcon Heavy ، سه هسته ای و 27 موتوره
آیا قانونی برای نزدیکی نازل موتور موشک از یکدیگر وجود دارد؟من تعجب می کنم آیا هیچ قانونی وجود دارد که چگونه می توانید نازل موتور را به یکدیگر نزدیک کنید. آیا هنگامی که دو یا چند شیپوره موتور را با هم مونتاژ می کنید محدودیت لرزش ، گرما و غیره وجود دارد؟
Saturn I دارای چهار موتور مرکزی بسیار نزدیک بود ، و موتورهای گیم بالینگ خارجی دورتر بودند. من می دانم که مواردفضاپیمایی در آنجا قرار داده شده بودند ، از جمله چیزهای دیگر ، برای ایجاد قدرت بهتر ، فشار دادن و غلتیدن. اما آیا محدودیت هایی برای کلاستر نازل موتور وجود دارد؟اما پارامترهای آنجا به مشخصات موتور بستگی دارد.بار گرما و تحمل ان
-
rohamavation
نام: roham hesami radرهام حسامی راد
محل اقامت: 100 مایلی شمال لندن جاده آیلستون، لستر، لسترشر. LE2
عضویت : سهشنبه ۱۳۹۹/۸/۲۰ - ۰۸:۳۴
پست: 3278-
سپاس: 5494
- جنسیت:
تماس:
Re: هوافضا
ما در حال حاضر از راکتهای شیمیایی سوخت جامد و سوخت مایع دوپایه (Bipropellant) و یا به ندرت سوخت مایع دوپایه (Monopropellant) برای پرتاب به مدار استفاده میکنیم، و برخی پرتابگرها مانند اسپیسشیپ وان(Spaceship One) و راکت پگاسوس (Pegasus Rocket) از موتورهای هواتنفسی در مرحله اول خود بهره استفاده میکنند .خوب سیستم پیشرانش فضایی مثل موتور واکنشی (reaction engine): این نوع موتور نیروی پیشران (تراست) را طبق قانون سوم نیوتن با استفاده از واکنش جرم خروجی تامین میکند یعنی خروج مواد حاصل از احتراق درون موتور، تغییر جرمی در فضاپیما ایجاد میکنه که منجر به تغییر سرعت فضاپیما در خلاف جهت خروج جریان جرمی میشود،مثل موتورهای هواتنفسی و پیشرانش الکترومغناطیسی البته موتورهای هواتنفسی در ماموریتهای فضایی کاربرد ندارند بلکه در بخش فرود به زمین پس از بازگشت به جو استفاده میشه.نوع دیگه موتور موشک (rocket engine): که موشکهای معمول فعلی از دسته موتورهای احتراق داخلی هستند. این موتورها جرم خروجی به صورت گاز داغ را با دمایی بسیار بالا تولید میکنند که این فرآیند توسط ترکیب سوخت مایع، جامد یا حتی گاز با مادهای اکسید کننده در محفظه احتراق صورت میگیرد. سپس این گاز داغ از دهانه خروجی (nozzle) زنگوله مانندی خارج میشود .نوع جدید پیشرانش الکترومغناطیسی electromagnetic propulsionاتمهای گازهای خروجی را با یک موتور الکتریکی ساده یونیزه کرده و سپس با ایجاد اختلاف ولتاژ در این یونها، آنها را با شتاب بالایی به حرکت درآورد و فضاپیما نیز تحت تاثیر این گازهای یونیزه، شتاب میگیرد حال من میگم چرا میگم نه تراسترهای الکتریکی معمولا نیروی پیشرانشی کمتر از یک نیوتن تولید مینمایند. این نیرو بر روی زمین تقریبا معادل وزن برداشتن یک خودکار میباشدالبته بازم من بگم که کاربرد پیشرانه ها گونه های مختلف پیشران های موشکی
1-پیشران های اصلی یا Primary Engine که برای ایجاد نیروی پیشرانش کاربرد دارند.
2-پیشران های کنترلی یا Control Engine که برای ایجاد نیرو ها و گشتاور های کنترلی مورد استفاده قرار می گیرند.
3-پیشران های ترمز کننده یا Braking Engine که برای کاهش سرعت موشک یا فضا پیما به منظور فرود یا تغییر مدار و مواردی از این قبیل مورد استفاده قرار می گیرد.این پیشران ها در خلاف جهت پیشران اصلی بوده و نیروی پسرانش تولید می کنند.
4-پیشرانش های تنظیم جهت Altitude Or Orientation Engine که برای تنظیم جهت ماهواره ها و سایر فضا پیماها استفاده شده که این نوع پیشرانش ها صرفاً برای تنظیم جهت و نه برای حرکت و تولید پیشرانش بانواع موتورهای به كاررفته در موشك ها به وسیله ی پیشران جامد:جت -توربو فن-پالس جت-رم جت-اسكرم جته کار گرفته می شوند.پس پیشرانه های جت به دو گروه اصلی هوا زی و غیر هوازی تقیسم می شوند كه راكت ها از نوع غیر هوازی بوده و پیشران های توربو جت ،توربو فن، توربو پراپ، توربو شفت، پالس جت و رم جت از انواع هوازی هایی هستند كه برای ایجاد نیروی پیشرانش در هواگردها (Aircraft) مورد استفاده قرار می گیرند.نیروی پیشرانش در موتورهای توربو جت عكس العملی است كه منحصراً از عمل جت سیال كه از خروجی موتور بیرون می زند بدست می آید
موتور های توربو فن،توربو پراپ و توربو شفت گونه های اقتباس یافته ای از موتور های جت هستند كه تقریباً بیشتر نیروی پیشران را از طریق فن، ملخ و روتور (به واسطه ی شفت) ایجاد می كنند.
رانشگرهای الکتریکی: این سیستم ها معمولاً در محدوده 1000-5000 ثانیه دارای ضربه خاص qvfi$I_{sp}$بسیار بالاتر هستند ، اما سطح رانش حاصل از آنها معمولاً بسیار کمتر و زیر 100 میلی آمپر است. برخلاف رانشگرهای شیمیایی ، شتاب جرم در این حالت به نیرو احتیاج دارد ، بنابراین لازم است که منبع تغذیه ای (یا با استفاده از صفحات خورشیدی یا راکتور هسته ای) در دسترس داشته باشید. این رانشگرها به دلیل خاصیت رانش زیاد و کمشان ، معمولاً در مأموریت هایی به کار می روند که به یک ΔV بزرگ نیاز دارند اما در جایی که زمان حیاتی نیست ، از آنجا که این مانورها معمولاً طولانی می شود.
بادبان خورشیدی: این سیستم از فشار تابش خورشید برای جابجایی وسیله نقلیه استفاده می کند ، بنابراین شما از استفاده از دو پیشرانه و نیرو اجتناب می کنید ، زیرا هر دو توسط خورشید تأمین می شوند ، اما جرم خشک شما بسیار زیاد است (به دلیل اندازه بادبان ) در این حالت ، به دلیل شدت باد خورشیدی ، سطح رانش نیز بسیار کم است ، بنابراین زمان حتی در مأموریت های با استفاده از این نوع سیستم ها بسیار کم اهمیت است.
با گفتن همه اینها ، بهترین سیستم پیشرانه چیزی است که برای سرعت بخشیدن به مقدار زیادی از جرم تا سرعت زیاد به انرژی بسیار کم (شیمیایی ، الکتریکی یا هسته ای) نیاز داشته باشد. اما با رعایت معادله بهره وری رانش ،$\eta$
$P = \frac{g}{2 \eta} T I_{sp},$
در جایی که g شتاب استاندارد گرانش است ، مشاهده می کنید که اگر می خواهید هم رانش و هم فشار ویژه را افزایش دهید ، لزوماً باید به ورودی برق افزایش دهید. بنابراین پیشرانه ایده آل در واقع همان موتوری است که بهترین تعادل را بین رانش ، انگیزه خاص و کارایی برای مورد شما داشته باشد.
ضد ماده همچنین بیشترین چگالی انرژی را نسبت به سایر مواد شناخته شده دارد. و اگر به عنوان سوخت استفاده شود ، می تواند کارآمدترین سیستم پیشرانه را با حداکثر 40٪ از انرژی جرم سوخت به طور مستقیم به رانش تبدیل کند (در مقایسه با 1٪ برای همجوشی ، کارآمدترین بعدی)
رانشگرهای اثر هال با استفاده از یک میدان مغناطیسی حرکت محوری الکترون ها را محدود می کنند و سپس از آنها برای یونیزه کردن پیشرانه ، تسریع موثر یون ها برای تولید رانش و خنثی سازی یون های ستون استفاده می کنند. ... رانشگرهای هال با پیشرانه های مختلفی کار می کنند که از رایج ترین آنها می توان به زنون و کریپتون اشاره کرد.راننده هال مزایای قابل توجه دیگری نیز دارد از جمله: طول عمر طولانی (10000 ساعت) ، تراکم توان بالا (0.4–1.3 کیلووات بر کیلوگرم) و دامنه ضربه ویژه خاص (1000–2000 ثانیه).موتورهای یونی موجود در BepiColombo چهار تراستر یونی QinetiQ T6 هستند. آنها به صورت منفرد یا جفت کار می کنند تا حداکثر نیروی ترکیبی 290 میلی آمپر (میلی وات) را فراهم کنند ، که آن را به قدرتمندترین موتور یونی در فضا تبدیل می کند,thruster اثر Hall یک موتور موشکی کوچک است که از یک میدان مغناطیسی قدرتمند برای تسریع یک پلاسمای کم چگالی و بنابراین تولید رانش استفاده می کند. راننده اثر هال که به آن راننده پلاسما نیز گفته می شود ، نوعی پیشرانه الکترواستاتیک است که به نوبه خود یک نوع پیشرانه یونی (دسته ای از پیشرانه های برقی فضایی) است. مانند موتورهای یونی مشبک ، مانند XIPS ، رانشگرهای هال به عنوان رانشگرهای الکترواستاتیک طبقه بندی می شوند. هر دو از یک گاز بی اثر ، معمولاً زنون ، به عنوان یک پیشرانه استفاده می کنند.الکترون ها توسط یک کاتد توخالی (الکترود منفی) در انتهای پایین دست تراستر تولید می شوند. آند (الکترود مثبت) یا "کانال" توسط منبع تغذیه راننده به پتانسیل بالایی شارژ می شود. الکترون ها به دیواره های کانال جذب می شوند و در جهت بالادست شتاب می گیرند. هنگامی که الکترون ها به سمت کانال حرکت می کنند ، با یک میدان مغناطیسی تولید شده توسط آهنرباهای الکتریکی قدرت گیرنده برخورد می کنند. این میدان مغناطیسی با مقاومت بالا الکترون ها را به دام می اندازد ، و باعث می شود که آنها در حلقه دایره ای در انتهای پایین کانال تراستر شکل بگیرند. thruster Hall نام خود را از این جریان الکترون گرفته است که جریان Hall نامیده می شود.
پیشرانه که از گاز بی اثر مانند زنون یا کریپتون در فشار کم تشکیل شده است ، به کانال راننده تزریق می شود. از آنجا که رانشگرهای هال از گاز بی اثر برای پیشرانه استفاده می کنند ، مانند موشک های شیمیایی خطر انفجار وجود ندارد. برخی از الکترونهای گیر افتاده در کانال با اتم های پیشرانه برخورد می کنند و یون ایجاد می کنند. هنگامی که یون های پیشرانه تولید می شوند ، آنها میدان الکتریکی تولید شده بین کانال (مثبت) و حلقه الکترون (منفی) را تجربه می کنند و خارج از راننده تسریع می شوند و یک پرتو یون ایجاد می کنند. رانش از نیرویی که یون ها به ابر الکترون وارد می کنند ، تولید می شود. این نیرو به میدان مغناطیسی منتقل می شود که به نوبه خود به مدار مغناطیسی راننده منتقل می شود. الکترون ها بسیار متحرک هستند و به یون های موجود در پرتو جذب می شوند و باعث می شوند که مقدار مساوی الکترون و یون همزمان از راننده خارج شود. این راننده را قادر می سازد تا از نظر الکتریکی خنثی بماند.در رانشگرهای اثر هال از میدانهای مغناطیسی قوی و قدرت فرکانس رادیویی برای گرم کردن الکترونها تا انرژی زیاد برای یونیزاسیون گاز استفاده نمی شود. در عوض ، آنها به یك جریان الكترونیك الكترونیك شتاب گرفته تا چند صد ولت جریان یافته از طریق حجم گاز برای یونیزاسیون تكیه می كنند. از آنجا که پتانسیل یونیزاسیون کریپتون بالاتر از زنون است (تقریباً 14.0 در مقابل 12.1 eV) ، یا بازده یونیزاسیون پایین خواهد بود یا به قدرت کاتدی بالاتری نیاز دارد.
بعلاوه ، الکترونهای با انرژی بالاتر به یک میدان مغناطیسی بالاتر برای نگهداری آنها احتیاج دارند که باعث افزایش جریان سیم پیچ و جرم مدار مغناطیسی می شود. الکترونهای با انرژی بالاتر نیز سریعتر فرسایش می دهند و باعث کاهش عمر مفید می شوند.
سرعت بالاتر کریپتون (در یک پتانسیل شتاب داده شده) به معنای qvfi$I_{sp}$بالاتر است ، اما رانش کلی و / یا بهره وری انرژی پایین تر است. با پیشرانه الکتریکی ، شما نسبت رانش به قدرت و qvfi$I_{sp}$ را معامله می کنید. این همه براساس انگیزه و جدول زمانی ماموریت قابل تنظیم است. رانشگرهای هال دارای qvfi$I_{sp}$ پایین تر ، اما رانش بیشتری هستند ، در حالی که رانشگرهای یونی دارای Isp بسیار بالاتر هستند ، اما رانش بسیار کمتری دارند. بنابراین برای ماموریت های طولانی با تکانه زیاد (مانند Dawn) از سیستم های یونی استفاده می کنید ،
مفهوم Arcjets استفاده از پیشرانه به عنوان هادی بین دو الکترود ، ایجاد قوس الکتریکی شدید و تحریک پیشرانه به پلاسمای فوق گرم است. این اجازه می دهد تا انرژی بیشتری از آنچه که واکنش شیمیایی فراهم می کند ، به آن تزریق شود - تبدیل برق به گرما.
از آنجا که هیچ محدودیتی ذاتی در میزان الکتریسیته ای که فرد می تواند از طریق پلاسما وارد کند وجود ندارد ، از نظر نظری در مورد انرژی گاز و در نتیجه سرعت اگزوز و تکانه خاص محدودیتی وجود ندارد. حد عملی البته ماهیت مهندسی دارد - برق فقط پلاسما را گرم نمی کند و پلاسمای فوق گرم نسبت به هر سازه ای که از آن عبور کند بسیار تهاجمی است. این امر هم خنک سازی کل تراستر را ضروری می کند و هم انرژی های قابل استفاده را به سطوحی محدود می کند که در آن تراستر آسیب حیاتی ناشی از کار را حفظ نکند.
صرف نظر از این ، انرژی های مورد استفاده عظیم هستند - HIPARC-R حدود 100 کیلووات کار می کند ، بنابراین حتی بدون توجه به مقیاس پیشران در مقایسه با مکعب (حدود 3U) یا پیشرانه ممنوع در مکعب ها ، راهی برای حفظ انرژی با مکعب وجود ندارد.
تغییر دیگر مربوط به گشتاور تولید شده توسط یک تراستر فعلی هال است. همانطور که یونها از طریق پلاسما تسریع می شوند ، میدان مغناطیسی شعاعی که الکترونهای پلاسما را به دام می اندازد یک ضربه کوچک به یونهای خروج خواهد داد. این منجر به ایجاد گشتاور در امتداد محور رانش می شود. بزرگ نیست زیرا نسبت بار به جرم یون های زنون بسیار کم است ، اما به اندازه کافی بزرگ است که باید جبران شود. نسبت شارژ به جرم کریپتون بیشتر است ، بنابراین انحراف زاویه ای بزرگتر خواهد بود. این باعث افزایش گشتاور نسبت به رانش و جبران خسارت بیشتر می شود. بسته به اینکه از چندتراستر استفاده می کنند ، می تواند نگهداری مداری را پیچیده کند.
1-پیشران های اصلی یا Primary Engine که برای ایجاد نیروی پیشرانش کاربرد دارند.
2-پیشران های کنترلی یا Control Engine که برای ایجاد نیرو ها و گشتاور های کنترلی مورد استفاده قرار می گیرند.
3-پیشران های ترمز کننده یا Braking Engine که برای کاهش سرعت موشک یا فضا پیما به منظور فرود یا تغییر مدار و مواردی از این قبیل مورد استفاده قرار می گیرد.این پیشران ها در خلاف جهت پیشران اصلی بوده و نیروی پسرانش تولید می کنند.
4-پیشرانش های تنظیم جهت Altitude Or Orientation Engine که برای تنظیم جهت ماهواره ها و سایر فضا پیماها استفاده شده که این نوع پیشرانش ها صرفاً برای تنظیم جهت و نه برای حرکت و تولید پیشرانش بانواع موتورهای به كاررفته در موشك ها به وسیله ی پیشران جامد:جت -توربو فن-پالس جت-رم جت-اسكرم جته کار گرفته می شوند.پس پیشرانه های جت به دو گروه اصلی هوا زی و غیر هوازی تقیسم می شوند كه راكت ها از نوع غیر هوازی بوده و پیشران های توربو جت ،توربو فن، توربو پراپ، توربو شفت، پالس جت و رم جت از انواع هوازی هایی هستند كه برای ایجاد نیروی پیشرانش در هواگردها (Aircraft) مورد استفاده قرار می گیرند.نیروی پیشرانش در موتورهای توربو جت عكس العملی است كه منحصراً از عمل جت سیال كه از خروجی موتور بیرون می زند بدست می آید
موتور های توربو فن،توربو پراپ و توربو شفت گونه های اقتباس یافته ای از موتور های جت هستند كه تقریباً بیشتر نیروی پیشران را از طریق فن، ملخ و روتور (به واسطه ی شفت) ایجاد می كنند.
رانشگرهای الکتریکی: این سیستم ها معمولاً در محدوده 1000-5000 ثانیه دارای ضربه خاص qvfi$I_{sp}$بسیار بالاتر هستند ، اما سطح رانش حاصل از آنها معمولاً بسیار کمتر و زیر 100 میلی آمپر است. برخلاف رانشگرهای شیمیایی ، شتاب جرم در این حالت به نیرو احتیاج دارد ، بنابراین لازم است که منبع تغذیه ای (یا با استفاده از صفحات خورشیدی یا راکتور هسته ای) در دسترس داشته باشید. این رانشگرها به دلیل خاصیت رانش زیاد و کمشان ، معمولاً در مأموریت هایی به کار می روند که به یک ΔV بزرگ نیاز دارند اما در جایی که زمان حیاتی نیست ، از آنجا که این مانورها معمولاً طولانی می شود.
بادبان خورشیدی: این سیستم از فشار تابش خورشید برای جابجایی وسیله نقلیه استفاده می کند ، بنابراین شما از استفاده از دو پیشرانه و نیرو اجتناب می کنید ، زیرا هر دو توسط خورشید تأمین می شوند ، اما جرم خشک شما بسیار زیاد است (به دلیل اندازه بادبان ) در این حالت ، به دلیل شدت باد خورشیدی ، سطح رانش نیز بسیار کم است ، بنابراین زمان حتی در مأموریت های با استفاده از این نوع سیستم ها بسیار کم اهمیت است.
با گفتن همه اینها ، بهترین سیستم پیشرانه چیزی است که برای سرعت بخشیدن به مقدار زیادی از جرم تا سرعت زیاد به انرژی بسیار کم (شیمیایی ، الکتریکی یا هسته ای) نیاز داشته باشد. اما با رعایت معادله بهره وری رانش ،$\eta$
$P = \frac{g}{2 \eta} T I_{sp},$
در جایی که g شتاب استاندارد گرانش است ، مشاهده می کنید که اگر می خواهید هم رانش و هم فشار ویژه را افزایش دهید ، لزوماً باید به ورودی برق افزایش دهید. بنابراین پیشرانه ایده آل در واقع همان موتوری است که بهترین تعادل را بین رانش ، انگیزه خاص و کارایی برای مورد شما داشته باشد.
ضد ماده همچنین بیشترین چگالی انرژی را نسبت به سایر مواد شناخته شده دارد. و اگر به عنوان سوخت استفاده شود ، می تواند کارآمدترین سیستم پیشرانه را با حداکثر 40٪ از انرژی جرم سوخت به طور مستقیم به رانش تبدیل کند (در مقایسه با 1٪ برای همجوشی ، کارآمدترین بعدی)
رانشگرهای اثر هال با استفاده از یک میدان مغناطیسی حرکت محوری الکترون ها را محدود می کنند و سپس از آنها برای یونیزه کردن پیشرانه ، تسریع موثر یون ها برای تولید رانش و خنثی سازی یون های ستون استفاده می کنند. ... رانشگرهای هال با پیشرانه های مختلفی کار می کنند که از رایج ترین آنها می توان به زنون و کریپتون اشاره کرد.راننده هال مزایای قابل توجه دیگری نیز دارد از جمله: طول عمر طولانی (10000 ساعت) ، تراکم توان بالا (0.4–1.3 کیلووات بر کیلوگرم) و دامنه ضربه ویژه خاص (1000–2000 ثانیه).موتورهای یونی موجود در BepiColombo چهار تراستر یونی QinetiQ T6 هستند. آنها به صورت منفرد یا جفت کار می کنند تا حداکثر نیروی ترکیبی 290 میلی آمپر (میلی وات) را فراهم کنند ، که آن را به قدرتمندترین موتور یونی در فضا تبدیل می کند,thruster اثر Hall یک موتور موشکی کوچک است که از یک میدان مغناطیسی قدرتمند برای تسریع یک پلاسمای کم چگالی و بنابراین تولید رانش استفاده می کند. راننده اثر هال که به آن راننده پلاسما نیز گفته می شود ، نوعی پیشرانه الکترواستاتیک است که به نوبه خود یک نوع پیشرانه یونی (دسته ای از پیشرانه های برقی فضایی) است. مانند موتورهای یونی مشبک ، مانند XIPS ، رانشگرهای هال به عنوان رانشگرهای الکترواستاتیک طبقه بندی می شوند. هر دو از یک گاز بی اثر ، معمولاً زنون ، به عنوان یک پیشرانه استفاده می کنند.الکترون ها توسط یک کاتد توخالی (الکترود منفی) در انتهای پایین دست تراستر تولید می شوند. آند (الکترود مثبت) یا "کانال" توسط منبع تغذیه راننده به پتانسیل بالایی شارژ می شود. الکترون ها به دیواره های کانال جذب می شوند و در جهت بالادست شتاب می گیرند. هنگامی که الکترون ها به سمت کانال حرکت می کنند ، با یک میدان مغناطیسی تولید شده توسط آهنرباهای الکتریکی قدرت گیرنده برخورد می کنند. این میدان مغناطیسی با مقاومت بالا الکترون ها را به دام می اندازد ، و باعث می شود که آنها در حلقه دایره ای در انتهای پایین کانال تراستر شکل بگیرند. thruster Hall نام خود را از این جریان الکترون گرفته است که جریان Hall نامیده می شود.
پیشرانه که از گاز بی اثر مانند زنون یا کریپتون در فشار کم تشکیل شده است ، به کانال راننده تزریق می شود. از آنجا که رانشگرهای هال از گاز بی اثر برای پیشرانه استفاده می کنند ، مانند موشک های شیمیایی خطر انفجار وجود ندارد. برخی از الکترونهای گیر افتاده در کانال با اتم های پیشرانه برخورد می کنند و یون ایجاد می کنند. هنگامی که یون های پیشرانه تولید می شوند ، آنها میدان الکتریکی تولید شده بین کانال (مثبت) و حلقه الکترون (منفی) را تجربه می کنند و خارج از راننده تسریع می شوند و یک پرتو یون ایجاد می کنند. رانش از نیرویی که یون ها به ابر الکترون وارد می کنند ، تولید می شود. این نیرو به میدان مغناطیسی منتقل می شود که به نوبه خود به مدار مغناطیسی راننده منتقل می شود. الکترون ها بسیار متحرک هستند و به یون های موجود در پرتو جذب می شوند و باعث می شوند که مقدار مساوی الکترون و یون همزمان از راننده خارج شود. این راننده را قادر می سازد تا از نظر الکتریکی خنثی بماند.در رانشگرهای اثر هال از میدانهای مغناطیسی قوی و قدرت فرکانس رادیویی برای گرم کردن الکترونها تا انرژی زیاد برای یونیزاسیون گاز استفاده نمی شود. در عوض ، آنها به یك جریان الكترونیك الكترونیك شتاب گرفته تا چند صد ولت جریان یافته از طریق حجم گاز برای یونیزاسیون تكیه می كنند. از آنجا که پتانسیل یونیزاسیون کریپتون بالاتر از زنون است (تقریباً 14.0 در مقابل 12.1 eV) ، یا بازده یونیزاسیون پایین خواهد بود یا به قدرت کاتدی بالاتری نیاز دارد.
بعلاوه ، الکترونهای با انرژی بالاتر به یک میدان مغناطیسی بالاتر برای نگهداری آنها احتیاج دارند که باعث افزایش جریان سیم پیچ و جرم مدار مغناطیسی می شود. الکترونهای با انرژی بالاتر نیز سریعتر فرسایش می دهند و باعث کاهش عمر مفید می شوند.
سرعت بالاتر کریپتون (در یک پتانسیل شتاب داده شده) به معنای qvfi$I_{sp}$بالاتر است ، اما رانش کلی و / یا بهره وری انرژی پایین تر است. با پیشرانه الکتریکی ، شما نسبت رانش به قدرت و qvfi$I_{sp}$ را معامله می کنید. این همه براساس انگیزه و جدول زمانی ماموریت قابل تنظیم است. رانشگرهای هال دارای qvfi$I_{sp}$ پایین تر ، اما رانش بیشتری هستند ، در حالی که رانشگرهای یونی دارای Isp بسیار بالاتر هستند ، اما رانش بسیار کمتری دارند. بنابراین برای ماموریت های طولانی با تکانه زیاد (مانند Dawn) از سیستم های یونی استفاده می کنید ،
مفهوم Arcjets استفاده از پیشرانه به عنوان هادی بین دو الکترود ، ایجاد قوس الکتریکی شدید و تحریک پیشرانه به پلاسمای فوق گرم است. این اجازه می دهد تا انرژی بیشتری از آنچه که واکنش شیمیایی فراهم می کند ، به آن تزریق شود - تبدیل برق به گرما.
از آنجا که هیچ محدودیتی ذاتی در میزان الکتریسیته ای که فرد می تواند از طریق پلاسما وارد کند وجود ندارد ، از نظر نظری در مورد انرژی گاز و در نتیجه سرعت اگزوز و تکانه خاص محدودیتی وجود ندارد. حد عملی البته ماهیت مهندسی دارد - برق فقط پلاسما را گرم نمی کند و پلاسمای فوق گرم نسبت به هر سازه ای که از آن عبور کند بسیار تهاجمی است. این امر هم خنک سازی کل تراستر را ضروری می کند و هم انرژی های قابل استفاده را به سطوحی محدود می کند که در آن تراستر آسیب حیاتی ناشی از کار را حفظ نکند.
صرف نظر از این ، انرژی های مورد استفاده عظیم هستند - HIPARC-R حدود 100 کیلووات کار می کند ، بنابراین حتی بدون توجه به مقیاس پیشران در مقایسه با مکعب (حدود 3U) یا پیشرانه ممنوع در مکعب ها ، راهی برای حفظ انرژی با مکعب وجود ندارد.
تغییر دیگر مربوط به گشتاور تولید شده توسط یک تراستر فعلی هال است. همانطور که یونها از طریق پلاسما تسریع می شوند ، میدان مغناطیسی شعاعی که الکترونهای پلاسما را به دام می اندازد یک ضربه کوچک به یونهای خروج خواهد داد. این منجر به ایجاد گشتاور در امتداد محور رانش می شود. بزرگ نیست زیرا نسبت بار به جرم یون های زنون بسیار کم است ، اما به اندازه کافی بزرگ است که باید جبران شود. نسبت شارژ به جرم کریپتون بیشتر است ، بنابراین انحراف زاویه ای بزرگتر خواهد بود. این باعث افزایش گشتاور نسبت به رانش و جبران خسارت بیشتر می شود. بسته به اینکه از چندتراستر استفاده می کنند ، می تواند نگهداری مداری را پیچیده کند.