

$(m_1 v_1^2 + m_2 v_2^2 + m_3 v_3^2)_\text{before} = (m_1 v_1^2 + m_2 v_2^2 + m_3 v_3^2)_\text{after}$
$(m_1 \mathbf{v_1} + m_2 \mathbf{v_2} + m_3 \mathbf{v_3})_\text{before} = (m_1 \mathbf{v_1} + m_2 \mathbf{v_2} + m_3 \mathbf{v_3})_\text{after}$
تکانه سیستم خطی چند جرمی
تکانهی خطی یک سیستم چندذرهای (سیستم متشکل از دو یا چند ذره) بهدستآمده از جمع تکانههای خطی تکتک ذرات تشکیل دهنده سیستم تعریف میشه ${\displaystyle p=\sum _{i}m_{i}v_{i}.}$
${\mathbf {P}}=\sum _{{i=1}}^{N}{\mathbf {p}}_{i}={\mathbf {p}}_{1}+{\mathbf { p}}_{2}+\cdots +{\mathbf {p}}_{N}=m_{1}{\mathbf {v}}_{1}+m_{2}{\mathbf {v}} _{2}+\cdots +m_{N}{\mathbf {v}}_{N}\,\!$
به طور کلی حل مشکل سه جرم بسیار سخته و اگر میتونید بهتره برخورد سه توپ را در سه جفت برخورد مدل کنید. من فکر نمی کنم که حل این معادلات بقای اندازه حرکت در بالا منجر به هیچ فرم فرمول دقیقی بشه که n≥3 باشه
توپ ها در حالی که آنها در یک زمان با هم برخورد می کنند.
شما یک ماتریس با تمام بردارهای سرعت ایجاد کنید
$\mathbf{v} = \begin{pmatrix} \vec{v}_1 \\ \vec{v}_2 \\ \vdots \\ \vec{v}_N \end{pmatrix} = \begin{pmatrix} \dot{x}_1 \\ \dot{y}_1 \\ \dot{x}_2 \\ \dot{y}_2 \\ \vdots \\ \dot{x}_N \\ \dot{y}_N \end{pmatrix}$
یک ماتریس قطری Diagonal Matrix با تمام جرم ها ایجاد کن
$\mathbf{M} = \begin{bmatrix} m_1 & 0 & 0 & 0 & \cdots & 0 & 0 \\
0 & m_1 & 0 & 0 & & 0 & 0 \\ 0 & 0 & m_2 & 0 & & 0 & 0 \\
0 & 0 & 0 & m_2 & & 0 & 0 \\ & & & & \ddots & & \\
0 & 0 & 0 & 0 & & m_N & 0 \\0 & 0 & 0 & 0 & & 0 & m_N
\end{bmatrix}$به طوری که Mv تمام اجزای حرکت هستش
شما به دنبال تغییر در سرعت Δv هستین به دلیل تمام تکانه های ناشی از برخورد. اگر مجموع تمام تکانه ها ℓ را بنامیم
تغییر سرعت اعمال کن $\Delta \mathbf{v} = \mathbf{M}^{-1} \boldsymbol{\ell}$
ماتریس جفت تماس Z. هر ستون نشان دهنده تماس بین دو جسم است $i \rightarrow j$ با بردار نرمال تماسی $\hat{n}_{ij}$ در jموقعیت ماتریس -$i-th$ بردار نرمال منفی$-\hat{n}_{ij}$
در iموقعیت ماتذیس مثلا:
$\mathbf{Z} = \begin{bmatrix}
-\hat{n}_{13} & 0 & -\hat{n}_{14} \\
0 & -\hat{n}_{24} & 0 \\
\hat{n}_{13} & 0 & 0 \\
0 & \hat{n}_{24} & \hat{n}_{14}
\end{bmatrix}$نشان دهنده ماتریس جفت تماس زمانی است که اجسام (1→3، 2 → 3 و 1 → 4) با هم برخورد می کنند. فلش جهتی را که بردار نرمال در آن قرار می گیره و از این رو جهت اعمال ضربه مثبت را نشان میده.دقت کنید که هر بردار نرمال تماسی دارای دو جزء $\hat{n} = ( \cos \psi, \sin \psi )$ است.
بردار مقدار ضربه ناشناخته برای هر جفت تماس.
$\mathbf{J} = \begin{pmatrix} J_{13} \\ J_{24} \\ J_{14} \end{pmatrix}$
اکنون مجموع تمام تکانه ها $\boldsymbol{\ell} = \mathbf{Z} \,\mathbf{J}$
سرعت نسبی هر جفت تماس را محاسبه کنید با پیش بینی سرعت ها در امتداد تماس عادی
$\mathbf{u}_{imp} = \mathbf{Z}^\top \mathbf{v}$قانون برخورد را بر حسب سرعت های نسبی قبل و بعد از برخورد تعیین کنید.
$\mathbf{Z}^\top \left( \mathbf{v} + \Delta \mathbf{v} \right) = -\epsilon \mathbf{Z}^\top \mathbf{v}$
جایی که ϵ ضریب بازگشت است. معلومات را به سمت راست حرکت دهید و تغییر سرعت نسبی را بر اساس پیدا کنید
$\mathbf{Z}^\top \Delta \mathbf{v} = -(1+\epsilon) \mathbf{Z}^\top \mathbf{v} = -(1+\epsilon) \mathbf{u}_{imp}$
3. 5. و 7. را کنار هم قرار دهید تا درست شود
$\mathbf{Z}^\top \left(\mathbf{M}^{-1} \left( \mathbf{Z} \,\mathbf{J} \right) \right) = -(1+\epsilon) \mathbf{u}_{imp}$
و تکانه های مجهول را حل کنید
$\mathbf{J} = -\left(\mathbf{Z}^\top \mathbf{M}^{-1} \mathbf{Z} \right)^{-1} (1+\epsilon) \mathbf{u}_{imp}$
توجه داشته باشید که $\mathbf{Z}^\top \mathbf{M}^{-1} \mathbf{Z}$ K×K است
ماتریسی که نیاز به وارونگی دارد.
وقتی همه تکانه ها محاسبه می شوند، هر بردار سرعت جسم تغییر می کند
$\Delta \mathbf{v} = \mathbf{M}^{-1} \mathbf{Z} \,\mathbf{J}$
.در موردی که متوجه شدم، فرض کنید یک جسم A دارم که با سرعت V به سمت 3 جسم در تماس B، C و D حرکت می کند:
من می خواهم چرخش ها را نادیده بگیرم تا مشکل را برای درک شما ساده کنم. شما باید یک سری رابطه غیرکشسان فرم را اعمال کنید
$\vec{n}_{k}^\top (\vec{v}_i^+-\vec{v}_j^+) = 0$جایی که $\vec{n}_k$ جهت نرمال k استتماس$k
-th$ و i,jجرم هایی هستند که این تماس بر آنها تأثیر می گذارد. بالانویس + بیانگر وضعیت پس از ضربه است. شما این رابطه را با یک سری k اعمال می کنید تکانه ها $J_k$
به طوری که$\vec{v}_i^+ = \vec{v}_i + \frac{\vec{n} J_k}{m_i}$
$\vec{v}_j^+ = \vec{v}_j - \frac{\vec{n} J_k}{m_j}$
از آنجایی که همه چیز باید در یک زمان اتفاق بیفتد، بهتر است مسئله را با ماتریس ها شکل دهیم.
ماتریس تماس A را در نظر بگیرید جایی که هر ستون k 1+ در i دارد
ردیف -امین و -1 در j
-پرتاب كردن. به عنوان مثال $A = \begin{pmatrix}0&-1 \\ -1 & 0 \\ 0 & 0 \\ 1 & 1 \end{pmatrix}$
به این معنی که دو تماس وجود داره یکی بین جسم 2 و جسم 4 و دیگری بین جسم 1 و 4. (در واقع هر 0 و 1 برای 2 بعدی 2×2 یا برای ماتریس های 3 بعدی صفر و هویت 3×3 هستند).روابط غیر کشسان هستند
$N^\top A^\top v^+ =0$
با ماتریس قطری
$N = \begin{pmatrix} \vec{n}_1 & 0 & \cdots & 0 \\ 0 & \vec{n}_2 & & 0 \\ \vdots & & & \vdots \\ 0 & 0 & \cdots & \vec{n}_K \end{pmatrix}$
و
$v = \begin{pmatrix} v_1 \\ v_2 \\ \vdots \\ v_N \end{pmatrix}$
تبادل حرکت با رابطه توصیف می شود
$M v^+ = M v - A N J$
جایی که M ماتریس جرم قطری ماتریس است $M=\begin{pmatrix}m_1& & & \\ &m_2 & & \\& & \ddots & \\ & & & m_N\end{pmatrix}$
و j بردار تکانه ها$J^\top=(J_1\,J_2\,\cdots J_K)$
برای حل مسئله، تکانه را با برخوردهای غیر کشسان ترکیب می کنیم تا به دست بیاوریم
$v^+ = v - M^{-1} A N J$
$N^\top A^\top \left(v - M^{-1} A N J \right) = 0$
(N⊤A⊤M−1AN)J=N⊤Av
$\left(N^\top A^\top M^{-1} A N\right) J = N^\top A v$
مثال
با یک
مانند بالا (4جرم دو بعدی، 2 تماس) و $\vec{v}_i = (\dot{x}_i,\dot{y}_i)^\top$
$\vec{n}_1=(1,0)^\top$
،$\vec{n}_2 = (0,1)^\top$
سپس
$A = \left(\begin{array}{cc|cc} 0 & 0 & -1 & 0\\ 0 & 0 & 0 & -1\\ \hline -1 & 0 & 0 & 0\\ 0 & -1 & 0 & 0\\ \hline 0 & 0 & 0 & 0\\ 0 & 0 & 0 & 0\\ \hline 1 & 0 & 1 & 0\\ 0 & 1 & 0 & 1 \end{array}\right)$
$N = \left(\begin{array}{c|c} 1 & 0\\ 0 & 0\\ \hline 0 & 0\\ 0 & 1 \end{array}\right)$
$M = \left(\begin{array}{cc|cc|cc|cc} m_{1} & 0 & 0 & 0 & 0 & 0 & 0 & 0\\ 0 & m_{1} & 0 & 0 & 0 & 0 & 0 & 0\\ \hline 0 & 0 & m_{2} & 0 & 0 & 0 & 0 & 0\\ 0 & 0 & 0 & m_{2} & 0 & 0 & 0 & 0\\ \hline 0 & 0 & 0 & 0 & m_{3} & 0 & 0 & 0\\ 0 & 0 & 0 & 0 & 0 & m_{3} & 0 & 0\\ \hline 0 & 0 & 0 & 0 & 0 & 0 & m_{4} & 0\\ 0 & 0 & 0 & 0 & 0 & 0 & 0 & m_{4} \end{array}\right)$
$v = \begin{pmatrix} \dot{x}_1 \\ \dot{y}_1 \\ \hline \dot{x}_2 \\ \dot{y}_2 \\ \hline \dot{x}_3 \\ \dot{y}_3 \\ \hline \dot{x}_4 \\ \dot{y}_4 \end{pmatrix}$
$N^\top A^\top M^{-1} A N = \left(\begin{array}{cc} \frac{1}{m_{1}} + \frac{1}{m_{4}} & 0\\ 0 & \frac{1}{m_{2}} + \frac{1}{m_{4}} \end{array}\right)$
$N^\top A^\top v = \begin{pmatrix} \dot{x}_4-\dot{x}_2 \\ \dot{y}_4 - \dot{y}_2 \end{pmatrix}$
$J = \begin{pmatrix} \frac{\dot{x}_4-\dot{x}_2}{\frac{1}{m_2}+\frac{1}{m_4}}
\\ \frac{\dot{y}_4-\dot{y}_1}{\frac{1}{m_1}+\frac{1}{m_4}} \end{pmatrix}$
سپس
$v^+ = v - M^{-1} A N J = \begin{pmatrix}
\dot{x}_1 \\
\frac{m_1 \dot{y}_1 + m_4 \dot{y}_4}{m_1+m_4} \\
\frac{m_2 \dot{x}_2 + m_4 \dot{x}_4}{m_2+m_4} \\
\dot{y}_2 \\
\dot{x}_3 \\
\dot{y}_3 \\
\frac{m_2 \dot{x}_2 + m_4 \dot{x}_4}{m_2+m_4} \\
\frac{m_1 \dot{y}_1 + m_4 \dot{y}_4}{m_1+m_4} \end{pmatrix}$
اقای فیزیکدان قاب استراحت هم درسته ودوم من دانشجوی فیزیک نیستم و از نسبیت هم اطلاعات دقیقی ندارم .من سرکارم با مکانیک کلاسیک هست مفاهیم دینامیک وترمو و ایرو اصول درسهای ماست .کلمه body بدنه هست میشه جسم هم به کار برد .پس خواننده میفهمه منظور جسم هست و البته در مفاهیم توده و جرم mass به کار میره .unknown impulse value vector خوب خودم میدونم بردارمقدار ضربه ناشناخته میشه یا میشه مقدار خوب قدر عربی هست میشه هم گفت .قدر همون اندازه یا مقدار میشه گفت . سوال که کرده بودن فقط در حالت احتمال تکانه بیان میشه دوم حالت ساده سوال ایشون میشه گفت هر سه توپ یا گوی یا ذره منظور ایشون جرم یکسانی داشته باشه و دو توپ من در حالت سکون باشند و توپ دیگر من با سرعت v در حالت حرکت هست.
. تکانه کل سیستم mv است و انرژی کل $\frac{1}{2}mv^2$. فرض میکنم که برخوردکاملا الاستیک است.
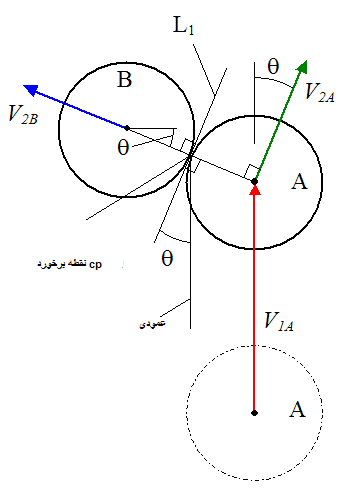
فرض من اینکه که توپ های A و B جرم یکسانی دارن و توپ B ابتدا در حالت سکونه (سرعت صفر). سرعت اولیه توپ $V_1A$ است. پس از برخورد توپ A با سرعت$ V_2A$ در جهت نشان داده شده و توپ B با سرعت$ V_2B$ در جهتی که تو شکل اوردم حرکت میکنه.خط L1 به صورت مماس بر هر دو توپ در نقطه تماس رسم میکنیم. به دلیل هندسهL1 بر خطی که از مرکز دو توپ و نقطه تماس CP می گذرد عموده. به دلیل هندسه L1 نیز با عمود زاویه θ و خطی که از مرکز توپ ها می گذره زاویه θ را با افقی ایجاد میکنه
پس از برخورد در CP، توپ B طبق شکل در جهت خطی که به مرکز دو توپ میپیونده حرکت میکنه. این به این دلیل است که نیروی (ضربه) وارد شده توسط توپ A به توپ B به طور طبیعی روی سطح توپ B عمل می کنه با فرض اینکه بین توپ ها اصطکاک وجود نداشته باشه پس توپ B در جهت این ضربه حرکت می کند.
مساله بعدی فهم سرعت در فضای 2 بعدی و سه بعدی هست حرکت تک بعدی
حرکت یک جسم یک بعدی اگر فقط یکی از سه مختصات مورد نیاز برای تعیین موقعیت جسم در فضا در زمان واقعی تغییر کنه. در چنین حرکتی جسم در امتداد یک خط مستقیم حرکت میکنه حرکت یک قطار در امتداد یک مسیر راه آهن مستقیم سقوط آزادانه جسم تحت نیروی جاذبه و خیلی چیزهای دیگه خوب در حرکت شتابدار $\overrightarrow{v_2}=\overrightarrow{v_1}+\overrightarrow{a}(t_2-t_1) ........(ii)$حالا حرکت دوبعدی مثل همون توپ بیلیارد $\overrightarrow{v}=\overrightarrow{v_x}+\overrightarrow{v_y}=\frac{\overrightarrow{x_2}-\overrightarrow{x_1}}{t_2-t_1}+\frac{\overrightarrow{y_2}-\overrightarrow{y_1}}{t_2-t_1}=\frac{\triangle{\overrightarrow{x}}}{\triangle{t}}+\frac{\triangle{\overrightarrow{y}}}{\triangle{t}}$و حرکت شتابدار $(\overrightarrow{v_{2x}}+\overrightarrow{v_{2y}})=(\overrightarrow{v_{1x}}+\overrightarrow{v_{1y}})+(\overrightarrow{a_x}+\overrightarrow{a_y})(t_2-t_1)$یا $(\sqrt{v_{2x}^2+v_{2y}^2})=(\sqrt{v_{1x}^2+v_{1y}^2})+(\sqrt{a_x^2+a_y^2})(t_2-t_1)$
به طور کلی سرعت متغییر در دوبعد $\overrightarrow{v}=Lt_{\triangle{t}\rightarrow0}(\frac{\triangle{\overrightarrow{x}}}{\triangle{t}})+Lt_{\triangle{t}\rightarrow0}(\frac{\triangle{\overrightarrow{y}}}{\triangle{t}})=\frac{d\overrightarrow{x}}{dt}+\frac{d\overrightarrow{y}}{dt}$
خیلی ساده در سه بعد هم $(\overrightarrow{v_{2x}}+\overrightarrow{v_{2y}}+\overrightarrow{v_{2z}})=(\overrightarrow{v_{1x}}+\overrightarrow{v_{1y}}+\overrightarrow{v_{1z}})+(\overrightarrow{a_x}+\overrightarrow{a_y}+\overrightarrow{a_z})(t_2-t_1)$و$(\sqrt{v_{2x}^2+v_{2y}^2+v_{2z}^2})=(\sqrt{v_{1x}^2+v_{1y}^2+v_{1z}^2})+(\sqrt{a_x^2+a_y^2+a_z^2})(t_2-t_1)$و$\overrightarrow{v}=Lt_{\triangle{t}\rightarrow0}(\frac{\triangle{\overrightarrow{x}}}{\triangle{t}})+Lt_{\triangle{t}\rightarrow0}(\frac{\triangle{\overrightarrow{y}}}{\triangle{t}})+Lt_{\triangle{t}\rightarrow0}(\frac{\triangle{\overrightarrow{z}}}{\triangle{t}})=\frac{d\overrightarrow{x}}{dt}+\frac{d\overrightarrow{y}}{dt}+\frac{d\overrightarrow{z}}{dt}$
پس از برخورد توپ های قرمز من به صورت سکون به طور متقارن حرکت می کنند و توپ آبی همون توپ در حال حرکت مستقیماً به ست توپها پرتاب میشه. همه اینها باید با تقارن در مورد برخوردهای الاستیک باشه. در نقطه برخورد مرکز توپ ها یک مثلث متساوی الاضلاع را تشکیل میدن
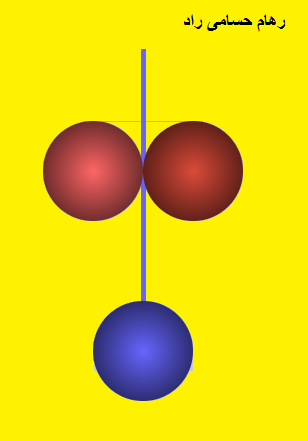
فرض کنین سرعت نهایی (به سمت بالا) توپ آبی $v_b$ باشد ، مولفه افقی سرعت توپ قرمز سمت راست$ v_x $باشه
و سرعت عمودی (به سمت بالا) آن$ v_y$ باشه . سپس ممن میتونم بقای انرژی و تکانه را بنویسم
$0 = mv_x - mv_x$
$mv = mv_y + mv_y + mv_b$
$\frac{1}{2}mv^2 = \frac{1}{2}mv_b^2 + 2\left(\frac{1}{2}m(v_x^2+v_y^2)\right)$
بعد ساده سازی$v = 2v_y+v_b$و $v^2 = v_b^2 + 2v_x^2+2v_y^2$
این دو معادله برای سه مجهول است که نمی تواند پاسخ منحصر به فردی بده. با این حالمن هنوز از این واقعیت استفاده نمیکنم که در هنگام تماس سه توپ یک مثلث متساوی الاضلاع را تشکیل میدن به این معنی که$v_y = \sqrt{3}v_x$
. با استفاده از این من میتونم راحتر حل کنم
$v_x = \frac{\sqrt{3}}{5} v$
$v_y = \frac{3}{5} v$
$v_b = -\frac{1}{5}v$
در شرایطی که جرم ها همه متفاوتند، فقط باید از طریق این محاسبه نسبت جرم رادنبال کن. اگر شعاع ها متفاوتند، باید پیکربندی هندسی توپ ها را در هنگام تماس آن ها تجزیه و تحلیل کنی و نحوه هدایت نیروها را برای تعیین جهت هایی که هر توپ در آن حرکت می کنه تعیین کنی. خیلی مشکل میشه جهت برای توپ نشانه باقی می ماند. از نظر ریاضی:
$m_{cue} \pmatrix{v_{2a} \\ v_{2b}} + m_{ball} \pmatrix{0 \\ 0} = m_{cue}\pmatrix{v_{2a} \\ 0} + m_{ball} \pmatrix{0 \\ v_{2b}}$
خواهید دید که این شرایط برای برخوردهای الاستیک مطابقت داره
بهتره شما واقعاً باید انرژی دورانی (قبل از برخورد و پس از برخورد) را نیز در نظر بگیرید.
من مثالی ساده میزنم سه ذره دارم به جرم mو 2m , 3m حالا جسم a با سرعت $u \, \mathrm m \mathrm s^{-1}$به b, c برخورد میکنه من کسر سرعت ها رو میخوام محاسبه کنم خوب جهت اطلاع دوستان فیزیکدانم در برخورد الاستیک کامل ضریب بازگشت e=1 گرفته میشهدر حال حاضر ما داریم1 برخورد A و B: اجازه بدین $V_A & V_B$
سرعت A و B درست پس از برخورد باشن سپس با استفاده از قانون بقای تکانه خطی من محاسبه میکنم که
$mu+0=mV_A+2mV_B\tag 1$
حال با استفاده از معادله برخورد نیوتن به دست می آوریم
$\frac{V_B-V_A}{u-0}=e=1\tag roham2$
در حل (1) و (2) به دست می آوریم
$V_A=\frac{-u}{3}, \ V_B=\frac{2u}{3}$
2.) برخورد B & C: اجازه بدین $V′_B & V_C$
سرعت های B و C درست پس از برخورد باشن سپس با استفاده از قانون بقای تکانه خطی محاسبه میکنم
$(2m)\frac{2u}{3}+0=2mV_B'+3mV_C\roham 3$
حال با استفاده از معادله برخورد نیوتن به دست می آوریم
$\frac{V_C-V_B'}{\frac{2u}{3}-0}=e=1\tag roham4$
در حل (3) و (4) به طور مشابه $V_B'=\frac{-2u}{15}, \ V_C=\frac{8u}{15}$
