

با شعاع 1 (در هر واحد) که بدون لغزش روی یک دیسک افقی ثابت S می چرخد. N معمولی از D دارای شیب α ثابت است، نسبت به z عمودی محور. دیسک S
دارای شعاع cosα است، بنابراین مرکز C باید ثابت بماند (بدون انتقال افقی مرکز C). تصویر رو نگاه کنین
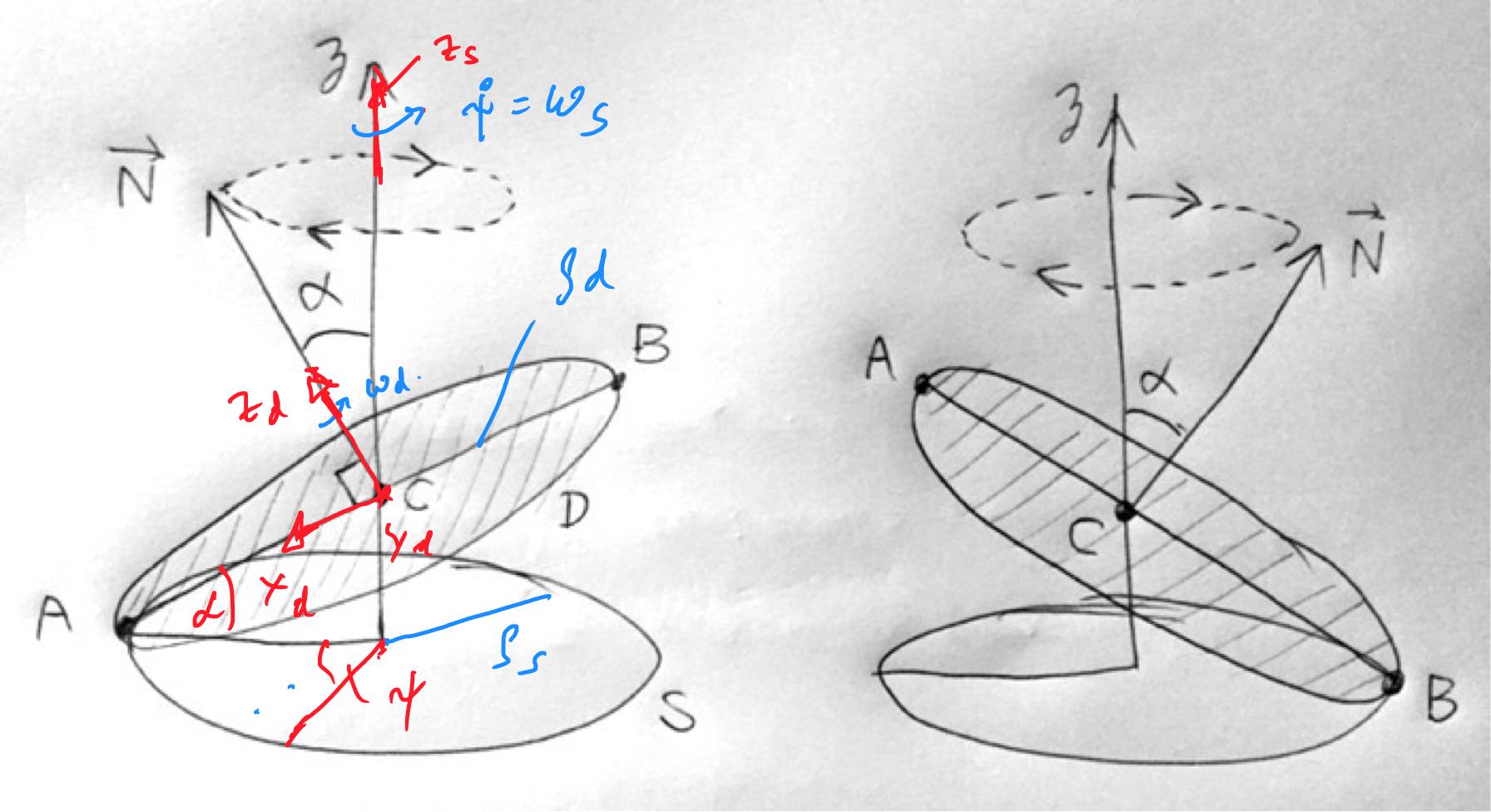
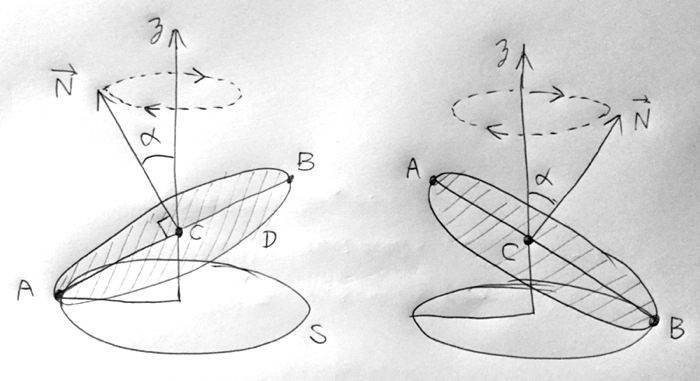
اگر دیسک متحرک D روی دیسک ثابت S می لغزه نقطه a به سادگی حول مرز S می چرخه. در این حالت ساده، مرکز C ثابت میمونه (عمودی و افقی). بردار نرمال N و شعاع CA به این صورت پیش می آید (من مبدأ محورهای دکارتی را در پایین در مرکز دیسک استاتیک قرار می دهم)
$\begin{align}
\mathbf{N}(t) &= \sin \alpha \, \cos \omega t \, \mathbf{x} + \sin \alpha \, \sin \omega t \, \mathbf{y} + \cos \alpha \, \mathbf{z}, \tag{1} \\[2ex]
\mathbf{CA}(t) &= \cos \alpha \, \cos \omega t \, \mathbf{x} + \cos \alpha \, \sin \omega t \, \mathbf{y} - \sin \alpha \, \mathbf{z}, \tag{2} \\[2ex]
\mathbf{r}_{\mathcal{A}}(t) &= \cos \alpha \, \cos \omega t \, \mathbf{x} + \cos \alpha \, \sin \omega t \, \mathbf{y}. \tag{3}
\end{align}$می خواهم حرکت نقطه مادی A را شرح دهم
زمانی که D روی S می چرخد، به جای اینکه به سادگی روی آن بلغزید. در این مورد، نقطه مادی A باید یک نوسان عمودی داشته باشد و به دور S نمی چرخد
، بنابراین (2) و (3) درست نیستند. چگونه نقطه مادی A و بردارهای N باید حرکت کند؟ ممن فهمیدم که N(t) باید مانند (1) باقی بماند، اما مطمئن نیستم که درست باشه من انتظار نوسان A را دارم
در اطراف ارتفاع ثابت $z_{\mathcal{C}} = \sin \alpha$
، چیزی مثل
$\tag{4}
\mathbf{r}_{\mathcal{A}}(t) = \cos \alpha \, \cos \varphi_{\mathcal{A}} \, \mathbf{x} + \cos \alpha \, \sin \varphi_{\mathcal{A}} \, \mathbf{y} + \sin \alpha \, (1 - \cos(\varphi_{\mathcal{A}} - \omega t)) \, \mathbf{z},$جایی که $\varphi_{\mathcal{A}}$
مختصات زاویه ای ساکن نقطه مادی در امتداد لبه دیسک استاتیک است. بردار (4) به گونه ای است که تنظیم$\varphi_{\mathcal{A}} = \omega t$
(در فریم مرجع چرخان) بردار (3) را پس می دهد. اما چگونه می تونم ثابت کنم که بردار (4) یک دیسک غلتان را بدون لغزش توصیف می کند؟
اما واضح است که حلقه ها فقط حول محور عمودی می چرخند و در واقع روی یکدیگر نمی چرخند.
من فکر می کنم که برای به دست آوردن شرایط چرخش باید اجازه چرخش اضافی دیسک D را بدهید
در این حالت سرعت نسبی در نقطه A برابر است با:$v_r=\omega_d\rho_d-\omega_s\rho_s$اگر سرعت vr باشد، شرط غلتش برآورده میشه برابر صفربنابراین سرعت زاویه ای دیسک D باید به صورت زیر باشه$\omega_d=\frac{\rho_s}{\rho_d}\,\omega_s$
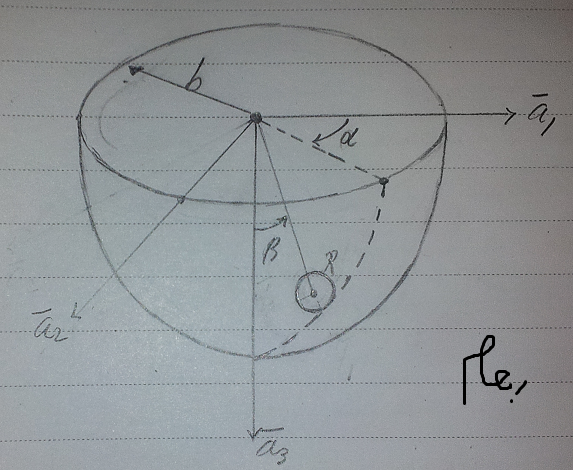
تجزیه و تحلیل حرکت یک توپ که بدون لغزش در داخل یک کاسه نیمکره می چرخد
یک توپ جامد به شعاع r را در نظر بگیرین و جرم m غلتیدن بدون لیز خوردن در یک کاسه نیمکره ای به شعاع R (حرکت ساده عقب و جلو). حالا من فرض میکنم نوسانات کوچک هستند و بنابراین تقریب زاویه کوچک برقراره. من می خواهم دوره نوسان را پیدا کنم و حرکت را به دو صورت تجزیه و تحلیل می کنم اول با استفاده از بقای انرژی و دوم با استفاده از دینامیک. با این حال، من دو پاسخ متناقض دریافت می کنم. یک یا هر دو راه حل باید اشتباه باشد، اما نمی توانم بفهمم کدام یک و مهمتر از آن، نمی توانم دلیل آن را بفهمم.خوب من ابتدا
روش 1: معادله بقای انرژی را برای توپ می نویسیم
$mgh + \frac{1}{2}mv^2 + \frac{1}{2}I\omega^2 = Constant$از مرکز جرم، ارتفاع را $h = R-(R-r)cos\theta$میگیریم
جایی که θ زاویه از عمود است. اعمال شرط عدم لغزظش$v = r\omega$ و گرفتن ممان اینرسی برای یک کره جامد$I = \frac{2}{5}mr^2$ می تونم معادله انرژی را به صورت بنویسم
$mg(R-(R-r)cos\theta) + \frac{7}{10}mr^2\omega^2 = Constant$تمایز با توجه به زمان:
$mg(R-r)sin\theta\cdot\omega + \frac{7}{5}mr^2\omega\cdot\alpha = 0$با گرفتن تقریب زاویه کوچک sinθ=θ
من گرفتم$g(R-r)\theta + \frac{7}{5}r^2\alpha=0$و$-\frac{5g(R-r)}{7r^2}\theta = \alpha$
که از آن می تونم $T = 2\pi\sqrt{\frac{7r^2}{5g(R-r)}}$ بدست آورم
روش 2: تنها گشتاوری که بر روی توپ در هر نقطه از حرکت آن تأثیر می گذارد، نیروی اصطکاک f است.
. پس می تونم بنویسم$\tau = I\alpha = fr$دوباره با استفاده از شرط نورد$a = r\alpha$ و ممان اینرسی برای یک کره جامد $\frac{2}{5}ma = f$نیروی خالص وارد بر سیستم جزء مماسی گرانش و نیروی اصطکاک است بنابراین$F = ma = mgsin\theta - f$و$\frac{7}{5}a = gsin\theta$ من الان با گرفتن تقریب زاویه کوچک و تبدیل a
به $\alpha$ من نتیجه گرفتم$\alpha = \frac{5g}{7r}\theta$و دوره متناظر$T = 2\pi\sqrt{\frac{7r}{5g}}$اکنون جواببهام بسیار متفاوته و اگر کسی به من اشاره کند که کجا اشتباه کرده ام ممنون می شوم.
منفکرمیکنم اولین مشتق من با استفاده از انرژی، از دو معنای متفاوت برای یک نماد ω استفاده می کنه . یک جا تعبیرش می کنم ω=θ˙
مشتق زمانی زاویه خط از مرکز توپ تا مرکز کاسه با عمودی.در جای دیگر ω را تفسیر می کنم به عنوان مشتق زمانی زاویه بی نامی که خود توپ از طریق آن می چرخه این دو زاویه با $r/(R-r)$به یکدیگر مرتبط هستند.خوب پاسخی که در روش اول گرفتم اشتباه بود پاسخ دوم تقریباً درست8 من باید R-r را بگیرم به جای r از مرکز کره پاسخ صحیح $2\pi\sqrt{7(R-r)/5g}$هست
مشکلی که در راه حل اولم می بینم این است که v سرعت مرکز جرم است. من v=rω را فرض کنم اما این سرعت پایین توپه. مرکز جرم به موازات آن در یک حرکت دایره ای حرکت می کنه که شعاع آن R-r است
$v=((R-r)/R)r\omega$.
معادلات محدودیت یک کره که در داخل کره دیگری می چرخه
حرکت کره ای را در نظر بگیرید که در حال غلتیدن (بدون لغزش) درون کره دیگری است.
معادلات محدودیت شرط نورد را استخراج کنم
توجه بچه های هوپا یک مشکل جسم سفت سه بعدی است. در واقع ما یک حرکت سه بعدی کلی کره در داخل کره دیگر را در نظر می گیرم
$\alpha$ و β توابع کلی زمان هستند و موقعیت مرکز کره را تعیین می کنند.
تلاش من معادلات محدودیت باید از این واقعیت حاصل شود که سرعت نقطه تماس ناپدید می شود. بنابراین نقطه تماس را با C نشون میدم
و مرکز کره توسط G من باید داشته باشم $\mathbf{v}_C=\mathbf{v}_G+\boldsymbol{\omega}\times \mathbf{r}_{G/C}=\mathbf{0}$ برای رفتن بیشتر باید vG بنویسم و ω بر حسب زوایای $\alpha$ ، β
و زوایای کلاسیک اویلر. من اینجا گیر کردم!
شرایط بدون لغزش 3 محدودیت به 5 درجه آزادی مشکل اضافه می کند. سرعت نقطه تماس باید صفر باشه
$\mathbf{v}_C = \mathbf{v}_G + \mathbf{r}_{G/C} \times \boldsymbol{\omega} = 0$بردار موقعیت$\mathbf{r}_G$
تابعی از زوایای $\alpha$ و βاست
فقط$\mathbf{r}_G = (b-R) \begin{pmatrix} \cos(\alpha) \sin(\beta) \\ \sin(\alpha) \sin(\beta) \\ -\cos(\beta) \end{pmatrix}$با تمایز به JA ژاکوبین خطی میرسه
ارتباط سرعت های تعمیم یافته $\dot{q}_A = (\dot{\alpha}, \dot{\beta})$
به سرعت دکارتی مرکز $\mathbf{v}_G = \mathtt{J}_A \dot{q}_A$
$\mathbf{v}_G = (b-R) \begin{vmatrix} -\sin\alpha \sin\beta & \cos\alpha \cos\beta \\
\cos\alpha \sin\beta & \sin\alpha \cos\beta \\
0 & \sin\beta \end{vmatrix} \begin{pmatrix} \dot{\alpha} \\ \dot{\beta} \end{pmatrix}$ماتریس جهت گیری E توپ به سه زاویه اویلر φ ، ψ و θبستگی دارد
نشان دهنده چرخش حول محورهای محلی x1، x2 و x3 به ترتیب.$\mathtt{E} = \mathrm{Rot}(\mathbf{x}_1,\, \varphi)\,\mathrm{Rot}(\mathbf{x}_2,\, \psi)\,\mathrm{Rot}(\mathbf{x}_3,\, \theta)$دوباره با تمایز با استفاده از قانون زنجیره، به JB ژاکوبین چرخشی مییرسم ارتباط سرعت های چرخشی تعمیم یافته$\dot{q}_B = (\dot{\varphi},\dot{\psi},\dot{\theta})$
به سرعت چرخش توپ $\boldsymbol{\omega} = \mathtt{J}_B \dot{q}_B$
$\boldsymbol{\omega} = \mathbf{x}_1 \dot{\varphi} + \mathrm{Rot}(\mathbf{x}_1,\, \varphi)\,\left(\mathbf{x}_2 \dot{\psi} + \mathrm{Rot}(\mathbf{x}_2,\, \psi)\, \mathbf{x}_3 \dot{\theta}\right)$
$\boldsymbol{\omega} = \begin{vmatrix} \mathbf{x}_1 & \mathrm{Rot}(\mathbf{x}_1,\, \varphi)\,\mathbf{x}_2 & \mathrm{Rot}(\mathbf{x}_1,\, \varphi)\,\mathrm{Rot}(\mathbf{x}_2,\, \psi)\,\mathbf{x}_3 \end{vmatrix} \begin{pmatrix} \dot{\varphi} \\ \dot{\psi} \\ \dot{\theta} \end{pmatrix}$ژاکوبین فوق JB
یک ماتریس 3×3 با ستون اول x1 است ستون دوم $\mathrm{Rot}(\mathbf{x}_1,\, \varphi)\,\mathbf{x}_2$x2 و غیره.همچنین توجه داشته باشین هوپایی ها که$\mathbf{r}_{G/C} \times \boldsymbol{\omega}$
را می توان به صورت ماتریسی به صورت زیر بنویسم
$\begin{vmatrix}
0 & -z_{G/C} & y_{G/C} \\
z_{G/C} & 0 &-x_{G/C} \\
-y_{G/C} & x_{G/C} & 0
\end{vmatrix}
\begin{pmatrix} \omega_x \\ \omega_y \\ \omega_z \end{pmatrix}$توجه: پاسخ مرتبطی که رابطه بین زوایای اویلر و سرعت چرخش را اثبات می کنه
