
سلام اثبات معادله ی قانون شکست عمومی چیست ؟
(V2)(Sinθ1)=(V1)(Sinθ2)
معادله قانون شکست عمومی
-
rohamavation

نام: roham hesami radرهام حسامی راد
محل اقامت: 100 مایلی شمال لندن جاده آیلستون، لستر، لسترشر. LE2
عضویت : سهشنبه ۱۳۹۹/۸/۲۰ - ۰۸:۳۴
پست: 3288-
سپاس: 5494
- جنسیت:
تماس:
Re: معادله قانون شکست عمومی
من رشته درسی ام چیز دیگه هست فقط میدونم از اصل فرما میاد .بازم برات پیدا کردم .البته سخت نبود یادم اومد اخه و دبیرستان مبحث نور خوندماصل فرما میگه نور از یه مسیر میره که زمان لازم برای رفتن اون مسیر حداقل باشه. حالا برای حرفای فیزیکی، نور از نقطه Q در محیط 1 به محیط 2 میره، شکست میخوره و به نقطه P میرسه. حالا میخواهیم نشون بدیم زمان لازم برای رفتن نور از Q به P از اصل فرما حداقله.
مسیر نور از Q به P رو با x نشون میدیم. دور نور از Q به P تو هر محیط با n₁x و n₂x برابر میشه. حالا طول کل مسیر (L) برابر $n₁x + n₂x$ است.
حالا میتونیم مشتق طول مسیر نور نسبت به x رو بگیریم و با صفر مساوی کنیم تا نقاط حساس (نقاط کریتیکال یا نقاط استایشی) رو پیدا کنیم:$dx
/dL
=n
1
−n
2
=0$
از این روابط میتونیم قانون اسنل رو از اصل فرما به دست بیاورم$\begin{equation}
n_1 \,\text{sin} \,\theta_1 = n_2 \, \text{sin}\,\theta_2
\end{equation}$
به ترتیب زاویه نور نسبت به عمود توی محیط 1 و 2 هستند. این قانون اسنل نشوندهنده انحنای نور تو مرز دو محیط مختلف با شاخصهای انکسار مختلفه."
اینجا قانون اسنله که میگه زاویه شیب نور و شاخص انکسار توی مرز دو محیط با شاخصهای انکسار n1,n2 به ترتیب با این قضیه ارتباط دارن:$\begin{equation}
n_1 \,\text{sin} \,\theta_1 = n_2 \, \text{sin}\,\theta_2
\end{equation}$که تو این معادله $θ 1$ و $θ2$ زاویه نور نسبت به عمود توی محیط ۱ و ۲ هستن حالا برای لاگرانژ، فرض کنیم λ متغیرهای لاگرانژی برای شرایط محدودیت (یعنی معادله سطح مرزی) هستن. میتونیم تابع لاگرانژ رو به این شکل تعریف کنم:$L(θ 1 ,θ 2 ,λ)=n 1 sin(θ 1 )−n 2 sin(θ 2 )+λ(θ 1 +θ 2 −π)$
که اینجا λ ضریب لاگرانژ برای شرایط محدودیت و π . بعد با گرفتن گرادیان تابع لاگرانژ نسبت به $θ 1$ و 2 θ و قرار دادن گرادیان برابر با صفر، میتونیم نقاط بهینه رو پیدا کنم و قانون اسنل رو با استفاده از لاگرانژ بهصورت تغییریافته بگم.
قانون اسنل را هم می توان از اصل فرما استخراج کردش که میگه نور مسیری را طی میکنه که کمترین زمان را میگیره با گرفتن مشتق طول مسیر نوری نقطه ثابت مسیر طی شده توسط نور پیدا میشه.نور از محیط 1، نقطه Q، وارد محیط 2 میشه شکست انجام میشه و در نهایت به نقطه P میرسه.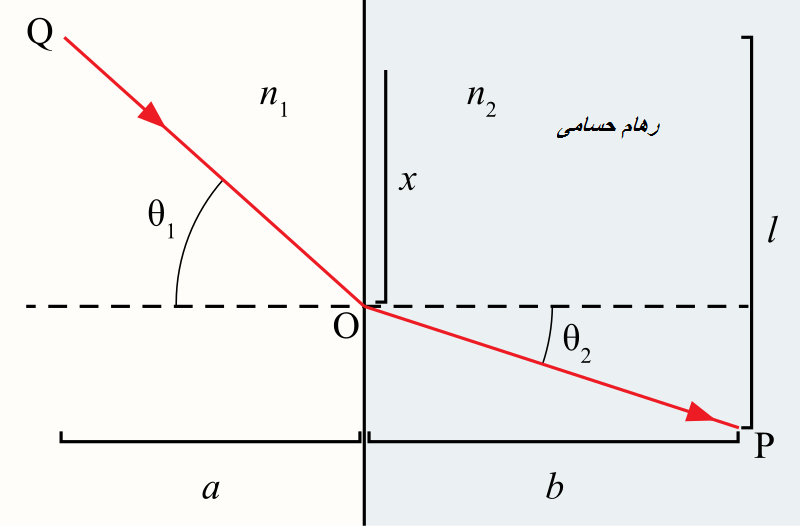
همانطور که در شکل سمت راست اوردشم ضریب شکست محیط 1 و متوسط 2 را به ترتیب ${\displaystyle n_{1}}$و ${\displaystyle n_{2}}$ فرض کنید. نور از طریق نقطه O از محیط 1 وارد محیط 2 میشه ${\displaystyle \theta _{1}}$زاویه تابش است،$ {\displaystyle \theta _{2}}$ زاویه شکست نسبت به حالت عادیه.سرعت فاز نور در محیط 1 و محیط 2 هستش
${\displaystyle v_{1}=c/n_{1}}$ و
به ترتیب ${\displaystyle v_{2}=c/n_{2}}$
${\displaystyle c}$ سرعت نور در خلاء است.
خوب شمافرض کن T زمان لازم برای عبور نور از نقطه Q از نقطه O به نقطه P باشه.
${\displaystyle T={\frac {\sqrt {x^{2}+a^{2}}}{v_{1}}}+{\frac {\sqrt {b^{2}+(l-x)^{2}}}{v_{2}}}={\frac {\sqrt {x^{2}+a^{2}}}{v_{1}}}+{\frac {\sqrt {b^{2}+l^{2}-2lx+x^{2}}}{v_{2}}}}$
که در آن a، b، l و x در شکل سمت راست نشان داده شده است، x پارامتر متغیر است.
${\displaystyle {\frac {dT}{dx}}={\frac {x}{v_{1}{\sqrt {x^{2}+a^{2}}}}}+{\frac {-(l-x)}{v_{2}{\sqrt {(l-x)^{2}+b^{2}}}}}=0}$ (نقطه ثابت)
توجه داشته باشید که ${\displaystyle {\frac {x}{\sqrt {x^{2}+a^{2}}}}=\sin \theta _{1}}$
و ${\displaystyle {\frac {l-x}{\sqrt {(l-x)^{2}+b^{2}}}}=\sin \theta _{2}}$
از این رومن دارم بقیه اش ساده هست
${\displaystyle {\frac {dT}{dx}}={\frac {\sin \theta _{1}}{v_{1}}}-{\frac {\sin \theta _{2}}{v_ {2}}}=0}$
${\displaystyle {\frac {\sin \theta _{1}}{v_{1}}}={\frac {\sin \theta _{2}}{v_{2}}}}$
${\displaystyle {\frac {n_{1}\sin \theta _{1}}{c}}={\frac {n_{2}\sin \theta _{2}}{c}}}$
${\displaystyle n_{1}\sin \theta _{1}=n_{2}\sin \theta _{2}}$
ببین اثبات هندسی ساده برای قانون شکست اسنل قانون شکست اسنل را می توان از اصل فرما محاسبه کنی که نور مسیرهایی را طی میکنه که با استفاده از حساب ساده، زمان را به حداقل میرسونه دو پرتو موازی A و B را در نظر بگیر که از محیط 1 (مثلاً هوا) به محیط 2 (مثلاً آب) میان پس از رسیدن به رابط $\mathcal{L}$ بین دو رسانه (هوا و آب) مسیر موازی خود را به ترتیب در جهات U و V ادامه می دهند.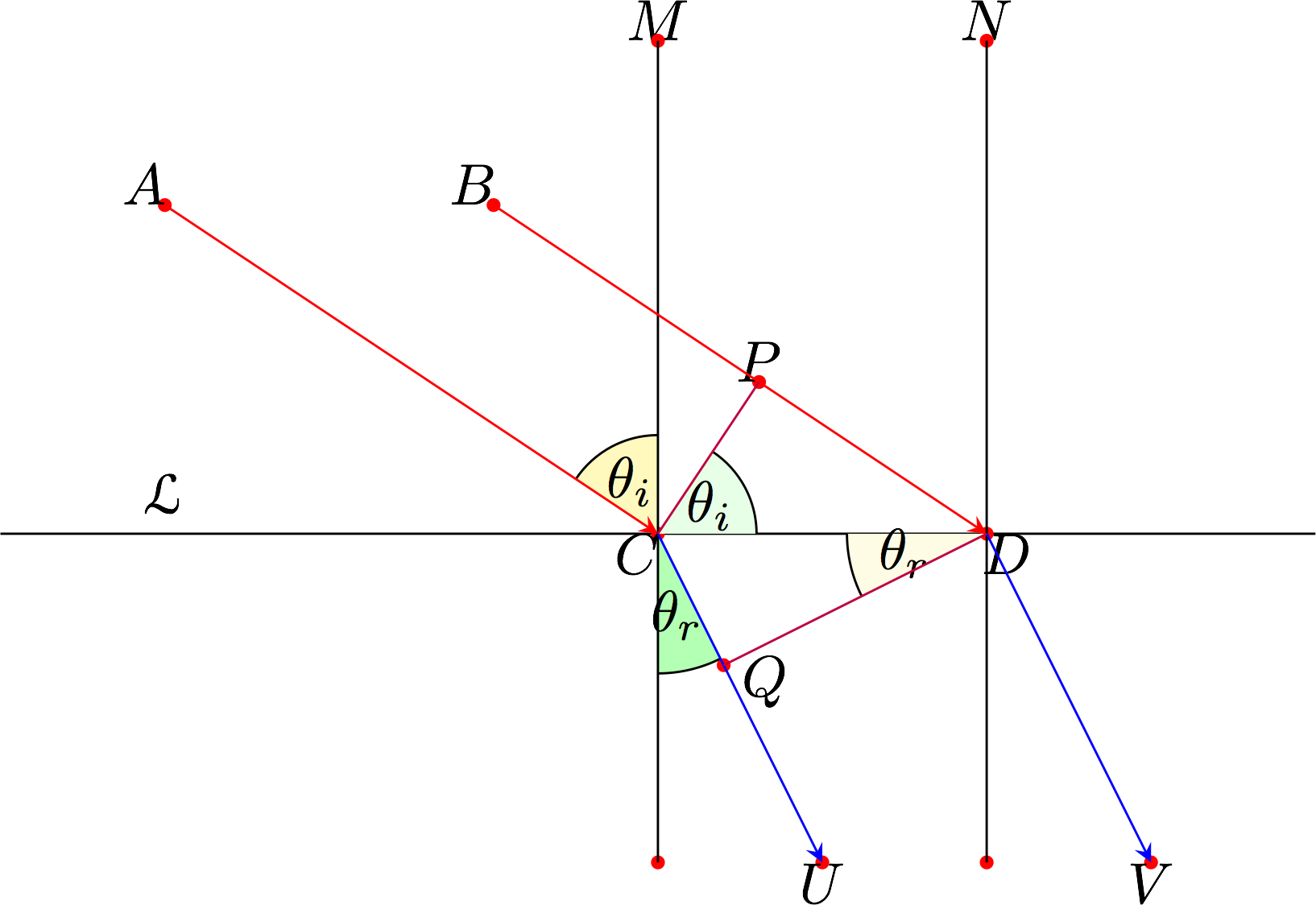
فرض کن در زمان t=0، پرتو نور A به رابط $\mathcal{L}$ در نقطه C می رسد، در حالی که پرتو B هنوز با فاصله PD از سطح دوره B با سرعت $v_{1}=\frac{c}{n_{1}}$ حرکت میکنه و در t ثانیه به D میرسه در طول این بازه زمانی هم پرتو A به سیر خود در محیط 2 با سرعت $v_{2}=\frac{c}{n_{2}}$ ادامه میده و به نقطه Q میرسه
خوب شما میتونی بقیه را به صورت هندسی (با نگاه کردن به خطوط موازی) از شکل فرمول بندی را بفهمی . ببین x نشان دهنده فاصله بین C و D هستش دیگه.
$\begin{eqnarray*}
x \sin\left(\theta_{i}\right) &=& PD \\
&=& v_{1} t \\
&=& \frac{c}{n_{1}} t \\
x \sin\left(\theta_{r}\right) &=& CQ \\
&=& v_{2} t \\
&=& \frac{c}{n_{2}} t
\end{eqnarray*}$
بدین ترتیب$\begin{eqnarray*}
n_{1} \sin\left(\theta_{i}\right) &=& \frac{c}{x} t \\
n_{2} \sin\left(\theta_{r}\right) &=& \frac{c}{x} t
\end{eqnarray*}$
بببین.
$\begin{eqnarray*}
\frac{n_{2} }{n_{1}} &=& \frac{\sin\left(\theta_{i}\right) }{ \sin\left(\theta_{r}\right)}
\end{eqnarray*}$انکسار یک پرتو فرودی معمولی از دیدگاه قانون شکست
$\sin\theta_1/\sin\theta_2=v_1/v_2$
یعنی θ1=0) چرا خوب ببین ودقت کن با اصل فرما مشتق میگیرم $t=\frac{\sqrt{a^2+x^2}}{v}+\frac{\sqrt{b^2+(d-x)^2}}{v'}$
شکل ببین حال ببین $\frac{dt}{dx}=\frac{x}{v\sqrt{a^2+x^2}}-\frac{d-x}{v'\sqrt{b^2+(d-x)^2}}=0$خوب این معادل است با $\frac{\sin(\theta_{1})}{v}=\frac{\sin(\theta_{2})}{v'}$
حال ببین $\frac{dt}{dx}=\frac{x}{v\sqrt{a^2+x^2}}-\frac{d-x}{v'\sqrt{b^2+(d-x)^2}}=0$خوب این معادل است با $\frac{\sin(\theta_{1})}{v}=\frac{\sin(\theta_{2})}{v'}$
اگر پرتو فرودی شما وارد سطح x=0 نرمال شده
$t=\frac{\sqrt{a^2+x^2}}{v}+\frac{\sqrt{b^2+(d-x)^2}}{v'}$بنابراین $\frac{dt}{dx}=0-\frac{d}{v'\sqrt{b^2+d^2}}=0$
و این ممکن است اگر$d=0 \rightarrow d-x=0$
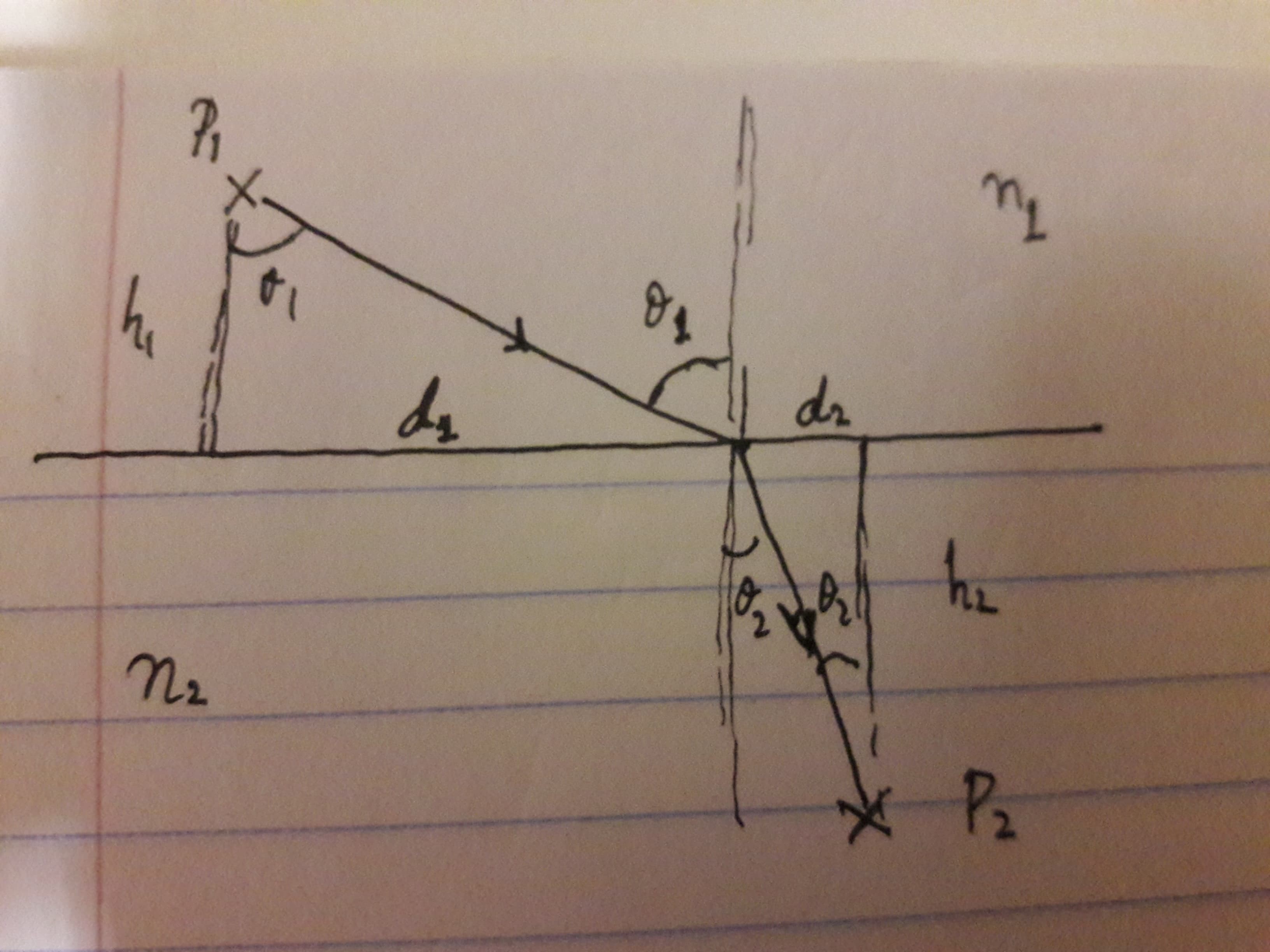
حالا میگیم چرا اصل فرما در واقع یک اصل حداقل زمانه. چون که از بین تمام مسیرهای ممکن بین دو نقطه، نور مسیری را دنبال میکنه که زمان صرف شده برای پیمودن آن مسیر را به حداقل میرسونه.
میدونیم که اگر سرعت نور در سراسر محیط ثابت باشد در خطوط مستقیم حرکت میکنه
فرض کن پرتو نور در نقطه P1 ساطع میشه و میخواددر کمترین زمان ممکن به نقطه P2 برسه خوب . این نقاط ثابتند و مختصات آنها $P_1(0,h_1), P_2(-h_2, D)$ هستش. االنه میخوام زمان طی شده در مجموعه مسیرهای احتمالی را به حداقل برسونم. فرض کن که پرتو نور در فاصله تابشی d1 از P1 و d2 از P2 فاصله داره. میدونی که که $d_1+d_2=D$ همچنین کل زمان سفر بین دو نقطه اینجا اوردم $T(d_1,d_2)=t_1+t_2=\frac{L_1}{v_1}+\frac{L_2}{v_2}=\frac{1}{c}\Big[n_1\sqrt{d_1^2+h_1^2}+n_2\sqrt{d_2^2+h_2^2}\Big]~~, ~~ d_1+d_2=D$
اکنون میخوام T را با استفاده از روشهای استاندارد ضربکننده لاگرانژ$\tilde{T}=T(d_1,d_2)-\lambda(d_1+d_2-D)$
و محاسبه کنم$\frac{\partial\tilde{T}}{\partial d_1}=\frac{n_1d_1}{c\sqrt{d_1^2+h_1^2}}-\lambda=0\\
\frac{\partial\tilde{T}}{\partial d_2}=\frac{n_2d_2}{c\sqrt{d_2^2+h_2^2}}-\lambda=0$
توجه کنید که $\sin\theta_1=\frac{d_1}{\sqrt{d_1^2+h_1^2}}$ و به طور مشابه برای زاویه تابش که:$n_1\sin\theta_1=n_2\sin\theta_2=\lambda$
امیدوارم این مفید باشد
مسیر نور از Q به P رو با x نشون میدیم. دور نور از Q به P تو هر محیط با n₁x و n₂x برابر میشه. حالا طول کل مسیر (L) برابر $n₁x + n₂x$ است.
حالا میتونیم مشتق طول مسیر نور نسبت به x رو بگیریم و با صفر مساوی کنیم تا نقاط حساس (نقاط کریتیکال یا نقاط استایشی) رو پیدا کنیم:$dx
/dL
=n
1
−n
2
=0$
از این روابط میتونیم قانون اسنل رو از اصل فرما به دست بیاورم$\begin{equation}
n_1 \,\text{sin} \,\theta_1 = n_2 \, \text{sin}\,\theta_2
\end{equation}$
به ترتیب زاویه نور نسبت به عمود توی محیط 1 و 2 هستند. این قانون اسنل نشوندهنده انحنای نور تو مرز دو محیط مختلف با شاخصهای انکسار مختلفه."
اینجا قانون اسنله که میگه زاویه شیب نور و شاخص انکسار توی مرز دو محیط با شاخصهای انکسار n1,n2 به ترتیب با این قضیه ارتباط دارن:$\begin{equation}
n_1 \,\text{sin} \,\theta_1 = n_2 \, \text{sin}\,\theta_2
\end{equation}$که تو این معادله $θ 1$ و $θ2$ زاویه نور نسبت به عمود توی محیط ۱ و ۲ هستن حالا برای لاگرانژ، فرض کنیم λ متغیرهای لاگرانژی برای شرایط محدودیت (یعنی معادله سطح مرزی) هستن. میتونیم تابع لاگرانژ رو به این شکل تعریف کنم:$L(θ 1 ,θ 2 ,λ)=n 1 sin(θ 1 )−n 2 sin(θ 2 )+λ(θ 1 +θ 2 −π)$
که اینجا λ ضریب لاگرانژ برای شرایط محدودیت و π . بعد با گرفتن گرادیان تابع لاگرانژ نسبت به $θ 1$ و 2 θ و قرار دادن گرادیان برابر با صفر، میتونیم نقاط بهینه رو پیدا کنم و قانون اسنل رو با استفاده از لاگرانژ بهصورت تغییریافته بگم.
قانون اسنل را هم می توان از اصل فرما استخراج کردش که میگه نور مسیری را طی میکنه که کمترین زمان را میگیره با گرفتن مشتق طول مسیر نوری نقطه ثابت مسیر طی شده توسط نور پیدا میشه.نور از محیط 1، نقطه Q، وارد محیط 2 میشه شکست انجام میشه و در نهایت به نقطه P میرسه.
همانطور که در شکل سمت راست اوردشم ضریب شکست محیط 1 و متوسط 2 را به ترتیب ${\displaystyle n_{1}}$و ${\displaystyle n_{2}}$ فرض کنید. نور از طریق نقطه O از محیط 1 وارد محیط 2 میشه ${\displaystyle \theta _{1}}$زاویه تابش است،$ {\displaystyle \theta _{2}}$ زاویه شکست نسبت به حالت عادیه.سرعت فاز نور در محیط 1 و محیط 2 هستش
${\displaystyle v_{1}=c/n_{1}}$ و
به ترتیب ${\displaystyle v_{2}=c/n_{2}}$
${\displaystyle c}$ سرعت نور در خلاء است.
خوب شمافرض کن T زمان لازم برای عبور نور از نقطه Q از نقطه O به نقطه P باشه.
${\displaystyle T={\frac {\sqrt {x^{2}+a^{2}}}{v_{1}}}+{\frac {\sqrt {b^{2}+(l-x)^{2}}}{v_{2}}}={\frac {\sqrt {x^{2}+a^{2}}}{v_{1}}}+{\frac {\sqrt {b^{2}+l^{2}-2lx+x^{2}}}{v_{2}}}}$
که در آن a، b، l و x در شکل سمت راست نشان داده شده است، x پارامتر متغیر است.
${\displaystyle {\frac {dT}{dx}}={\frac {x}{v_{1}{\sqrt {x^{2}+a^{2}}}}}+{\frac {-(l-x)}{v_{2}{\sqrt {(l-x)^{2}+b^{2}}}}}=0}$ (نقطه ثابت)
توجه داشته باشید که ${\displaystyle {\frac {x}{\sqrt {x^{2}+a^{2}}}}=\sin \theta _{1}}$
و ${\displaystyle {\frac {l-x}{\sqrt {(l-x)^{2}+b^{2}}}}=\sin \theta _{2}}$
از این رومن دارم بقیه اش ساده هست
${\displaystyle {\frac {dT}{dx}}={\frac {\sin \theta _{1}}{v_{1}}}-{\frac {\sin \theta _{2}}{v_ {2}}}=0}$
${\displaystyle {\frac {\sin \theta _{1}}{v_{1}}}={\frac {\sin \theta _{2}}{v_{2}}}}$
${\displaystyle {\frac {n_{1}\sin \theta _{1}}{c}}={\frac {n_{2}\sin \theta _{2}}{c}}}$
${\displaystyle n_{1}\sin \theta _{1}=n_{2}\sin \theta _{2}}$
ببین اثبات هندسی ساده برای قانون شکست اسنل قانون شکست اسنل را می توان از اصل فرما محاسبه کنی که نور مسیرهایی را طی میکنه که با استفاده از حساب ساده، زمان را به حداقل میرسونه دو پرتو موازی A و B را در نظر بگیر که از محیط 1 (مثلاً هوا) به محیط 2 (مثلاً آب) میان پس از رسیدن به رابط $\mathcal{L}$ بین دو رسانه (هوا و آب) مسیر موازی خود را به ترتیب در جهات U و V ادامه می دهند.
فرض کن در زمان t=0، پرتو نور A به رابط $\mathcal{L}$ در نقطه C می رسد، در حالی که پرتو B هنوز با فاصله PD از سطح دوره B با سرعت $v_{1}=\frac{c}{n_{1}}$ حرکت میکنه و در t ثانیه به D میرسه در طول این بازه زمانی هم پرتو A به سیر خود در محیط 2 با سرعت $v_{2}=\frac{c}{n_{2}}$ ادامه میده و به نقطه Q میرسه
خوب شما میتونی بقیه را به صورت هندسی (با نگاه کردن به خطوط موازی) از شکل فرمول بندی را بفهمی . ببین x نشان دهنده فاصله بین C و D هستش دیگه.
$\begin{eqnarray*}
x \sin\left(\theta_{i}\right) &=& PD \\
&=& v_{1} t \\
&=& \frac{c}{n_{1}} t \\
x \sin\left(\theta_{r}\right) &=& CQ \\
&=& v_{2} t \\
&=& \frac{c}{n_{2}} t
\end{eqnarray*}$
بدین ترتیب$\begin{eqnarray*}
n_{1} \sin\left(\theta_{i}\right) &=& \frac{c}{x} t \\
n_{2} \sin\left(\theta_{r}\right) &=& \frac{c}{x} t
\end{eqnarray*}$
بببین.
$\begin{eqnarray*}
\frac{n_{2} }{n_{1}} &=& \frac{\sin\left(\theta_{i}\right) }{ \sin\left(\theta_{r}\right)}
\end{eqnarray*}$انکسار یک پرتو فرودی معمولی از دیدگاه قانون شکست
$\sin\theta_1/\sin\theta_2=v_1/v_2$
یعنی θ1=0) چرا خوب ببین ودقت کن با اصل فرما مشتق میگیرم $t=\frac{\sqrt{a^2+x^2}}{v}+\frac{\sqrt{b^2+(d-x)^2}}{v'}$
شکل ببین
حال ببین $\frac{dt}{dx}=\frac{x}{v\sqrt{a^2+x^2}}-\frac{d-x}{v'\sqrt{b^2+(d-x)^2}}=0$خوب این معادل است با $\frac{\sin(\theta_{1})}{v}=\frac{\sin(\theta_{2})}{v'}$اگر پرتو فرودی شما وارد سطح x=0 نرمال شده
$t=\frac{\sqrt{a^2+x^2}}{v}+\frac{\sqrt{b^2+(d-x)^2}}{v'}$بنابراین $\frac{dt}{dx}=0-\frac{d}{v'\sqrt{b^2+d^2}}=0$
و این ممکن است اگر$d=0 \rightarrow d-x=0$
حالا میگیم چرا اصل فرما در واقع یک اصل حداقل زمانه. چون که از بین تمام مسیرهای ممکن بین دو نقطه، نور مسیری را دنبال میکنه که زمان صرف شده برای پیمودن آن مسیر را به حداقل میرسونه.
میدونیم که اگر سرعت نور در سراسر محیط ثابت باشد در خطوط مستقیم حرکت میکنه
فرض کن پرتو نور در نقطه P1 ساطع میشه و میخواددر کمترین زمان ممکن به نقطه P2 برسه خوب . این نقاط ثابتند و مختصات آنها $P_1(0,h_1), P_2(-h_2, D)$ هستش. االنه میخوام زمان طی شده در مجموعه مسیرهای احتمالی را به حداقل برسونم. فرض کن که پرتو نور در فاصله تابشی d1 از P1 و d2 از P2 فاصله داره. میدونی که که $d_1+d_2=D$ همچنین کل زمان سفر بین دو نقطه اینجا اوردم $T(d_1,d_2)=t_1+t_2=\frac{L_1}{v_1}+\frac{L_2}{v_2}=\frac{1}{c}\Big[n_1\sqrt{d_1^2+h_1^2}+n_2\sqrt{d_2^2+h_2^2}\Big]~~, ~~ d_1+d_2=D$
اکنون میخوام T را با استفاده از روشهای استاندارد ضربکننده لاگرانژ$\tilde{T}=T(d_1,d_2)-\lambda(d_1+d_2-D)$
و محاسبه کنم$\frac{\partial\tilde{T}}{\partial d_1}=\frac{n_1d_1}{c\sqrt{d_1^2+h_1^2}}-\lambda=0\\
\frac{\partial\tilde{T}}{\partial d_2}=\frac{n_2d_2}{c\sqrt{d_2^2+h_2^2}}-\lambda=0$
توجه کنید که $\sin\theta_1=\frac{d_1}{\sqrt{d_1^2+h_1^2}}$ و به طور مشابه برای زاویه تابش که:$n_1\sin\theta_1=n_2\sin\theta_2=\lambda$
امیدوارم این مفید باشد
آخرین ویرایش توسط rohamavation چهارشنبه ۱۴۰۲/۱۱/۲۵ - ۰۸:۳۱, ویرایش شده کلا 2 بار

-
rohamavation
نام: roham hesami radرهام حسامی راد
محل اقامت: 100 مایلی شمال لندن جاده آیلستون، لستر، لسترشر. LE2
عضویت : سهشنبه ۱۳۹۹/۸/۲۰ - ۰۸:۳۴
پست: 3288-
سپاس: 5494
- جنسیت:
تماس:
Re: معادله قانون شکست عمومی
ببین این قانون در هواپیما چه کاربردی داره این قانون مهمه چون توی فیبرهای نوری، وقتی نور از یه فیبر به فیبر دیگه میره، این قانون کمک میکنه زاویه شیب نور در فیبرها رو کنترل کنیم تا نور بهتر منتقل بشه و از انرژی کمتری استفاده بشه
فیبر نوری در کنترل پیشرانهها:
تو این بخش، میگم که فیبر نوری برای ارتباط بین قسمتهای مختلفی که در کنترل بالهها و پیشرانهها نقش دارند، استفاده میشه. این ارتباطات شامل انتقال دادههای مربوط به سیستمهای کنترل، سنسورها، و سایر اطلاعات میشن.
استفاده از فیبر نوری در سیستمهای Fly-By-Wire:
تو این قسمت، توضیح میدم که سیستمهای Fly-By-Wire که کنترل پرواز هواپیما رو دارن، از ارتباطات فیبر نوری برای اطمینان از سرعت انتقال داده و مقاومت در برابر تداخلات الکترومغناطیسی استفاده میکنند.
کنترل BITE (Built-In Test Equipment) با استفاده از فیبر نوری:
تو این بخش، توضیح میدم که سیستمهای BITE برای ارزیابی و تشخیص خطاها و مشکلات در سیستمهای الکترونیکی هواپیما از ارتباطات فیبر نوری برخوردارند. این ارتباطات بهشون کمک میکنه که به سرعت و با دقت مشکلات رو تشخیص بدن.
فیبر نوری در کنترل پیشرانهها:
تو این بخش، میگم که فیبر نوری برای ارتباط بین قسمتهای مختلفی که در کنترل بالهها و پیشرانهها نقش دارند، استفاده میشه. این ارتباطات شامل انتقال دادههای مربوط به سیستمهای کنترل، سنسورها، و سایر اطلاعات میشن.
استفاده از فیبر نوری در سیستمهای Fly-By-Wire:
تو این قسمت، توضیح میدم که سیستمهای Fly-By-Wire که کنترل پرواز هواپیما رو دارن، از ارتباطات فیبر نوری برای اطمینان از سرعت انتقال داده و مقاومت در برابر تداخلات الکترومغناطیسی استفاده میکنند.
کنترل BITE (Built-In Test Equipment) با استفاده از فیبر نوری:
تو این بخش، توضیح میدم که سیستمهای BITE برای ارزیابی و تشخیص خطاها و مشکلات در سیستمهای الکترونیکی هواپیما از ارتباطات فیبر نوری برخوردارند. این ارتباطات بهشون کمک میکنه که به سرعت و با دقت مشکلات رو تشخیص بدن.
Re: معادله قانون شکست عمومی
سلام
خیلی ممنون بابت پاسختان
مثل همیشه کامل ممنون
فقط یک سوال
این نمودار ها ومدل هایی که میسازید مثل همین عکسا که تو پاسختون هست
با چه برنامه ای درستشون میکنید ؟
خیلی ممنون بابت پاسختان
مثل همیشه کامل ممنون
فقط یک سوال
این نمودار ها ومدل هایی که میسازید مثل همین عکسا که تو پاسختون هست
با چه برنامه ای درستشون میکنید ؟
Re: معادله قانون شکست عمومی
از برنامه گوگل استفاده کنید و بعد کپی رایت هارو با ابزار healing tool فوتوشاپ پاک کنید و اسم خودتون رو درج کنید.
https://commons.wikimedia.org/wiki/File ... w_(ar).png
{kind=link}
https://physics.stackexchange.com/quest ... -principle
https://math.stackexchange.com/question ... refraction
اگر خواستید تصویر جدیدی بسازید، میتونید از انواع زبان های برنامه نویسی استفاده کنید. مثلا با matplotlib در پایتون میشه همچین تصاویری ساخت.
-
rohamavation
نام: roham hesami radرهام حسامی راد
محل اقامت: 100 مایلی شمال لندن جاده آیلستون، لستر، لسترشر. LE2
عضویت : سهشنبه ۱۳۹۹/۸/۲۰ - ۰۸:۳۴
پست: 3288-
سپاس: 5494
- جنسیت:
تماس:
Re: معادله قانون شکست عمومی
ببین، قانون شکست نور، یا همون قانون اسنل در مورد انکسار نور حرف میزنه. میگه که وقتی نور از یک وسط شفاف به وسط دیگه انتقال پیدا میکنه زاویههای انعکاس و انکسار با هم مرتبطن. یعنی میگه
$n_1 \sin(\theta_1) = n_2 \sin(\theta_2)$
حالا بیا با لاگرانژ این معادله رو اثبات کنم برات. فرض کن t یه عدده کوچیک باشه که نشون میده چقدر نور از یه وسط به وسط دیگه انعکاس میکنه. میخواهیم مسیر نور رو از یه نقطه
A به یه نقطه B کمینه کنیم.خوب ببین اصل لاگرانژ میگه که ما باید یه تابع جدید بسازم که تفاضل مسیر نور و تعداد دفعات انعکاس نور رو کمینه کنه. اینجا منظور از تابع یه تابع انرژیه که در وسایل شفاف مختلف مختلفه.
با حل معادله اولین مشتق و استفاده از قانون انکسار نور به همون قانون شکست نور میرسم. این قانون همیشه به شکل $n_1 \sin(\theta_1) = n_2 \sin(\theta_2)$
برقراره. با اصل فرما و لاگرانژ یه روش خوب دربارهی قانون شکست نور بیارم براتون. پس فرض کن که نور از یه جا به جای دیگه میخواد بره و مسیری که طی میکنه رو با L نشون میدیم.
حالا فرض کن که دارم یه تابع از انرژی مسیر من دارم این تابع رو با L نشون میدم. اصل لاگرانژ میگه که وقتی این تابعو بین دو نقطهی A و B از فضا مینیمم میکنم مسیری که نور طی میکنه از اونجایی که این انتگرال صفره، مینیممه.
حالا از اصل اویلر-لاگرانژ استفاده میکنم. این اصل میگه که اگه یه متغیر توی یه تابع مختلفه میشه، تغییر اون تابع با توجه به تغییرات متغیرها به شکل خاصی اتفاق میافته. ما از این اصل استفاده میکنم تا معادلههای حرکت نور رو پیدا کنم.
این معادلهها به اون قانون شکست نور منتهی میشن که میگه که زمانی که نور از یه وسط شفاف به وسط دیگه میره، زوایای انعکاس و انکسار با هم مرتبطن
در اینجا n 1 و n2 شاخص شکست دو وسط مختلف وθ 1 و θ 2 زوایای شکست هستن ابتدا از اصل فرما استفاده میکنم. فرض کن یک ذره نور از نقطه A به نقطه B حرکت کند. مسیری که نور طی میکنه
L نشون میدم اصل فرما چی میکه که عبور نور از یک مسیر مینیمم کننده $\delta \int_{A}^{B} nds = 0 $
که در اینجا n شاخص شکست و ds افزونگی مسیره خوب الانه من از لاگرانژی استفاده میکنم برات$L = n_1 + \left( \frac{dx}{dy} \right)^2 $
y ارتفاع نور نسبت به محور x و x مختصات افقیه خوب کمی سختر شد بین $\frac{dx}{d} \left( \frac{\partial y'}{\partial L} \right) - \frac{\partial y}{\partial L} = 0 $
معادله اویلر-لاگرانژ اون این میشه$\frac{dx}{dy} \left( \frac{\partial y'}{\partial L} \right) - \frac{\partial y}{\partial L} = 0 $
حالا میخوام این معادله را حل کنم. ابتدا مشتقات جزئی را محاسبه میکنم:$\frac{dx}{dy} \left( \frac{\partial y'}{\partial L} \right) - \frac{\partial y}{\partial L} = 0 $
از قاعده زنجیری برای محاسبه این مشتقه $\frac{\partial L}{\partial y'} = 2 \frac{dy}{dx} \cdot \frac{\partial L}{\partial \left(\frac{dy}{dx}\right)}$
حالا معادله اویلر-لاگرانژ اینطورمیشه$\frac{dx}{dy} \left(2 \frac{dy}{dx} \cdot \frac{\partial L}{\partial \left(\frac{dy}{dx}\right)}\right) - \frac{\partial L}{\partial y} = 0 $
حالا مشتقه اول نسبت به x رابرات میارم$\frac{dx}{dy} \left(2 \frac{dy}{dx} \cdot \frac{\partial L}{\partial \left(\frac{dy}{dx}\right)}\right) = 2 \left(\frac{dy}{dx}\right)^2 \frac{d^2x}{dy^2} + \frac{dy}{dx} \cdot \frac{dy}{d}\left(\frac{dy}{dx}\right)
$پس معادله بهاین طور تغییر میکنه$2 \left(\frac{dy^2}{dx^2}\right) \cdot \left(\frac{dy}{dx}\right)^2 + \frac{dy}{dx} \cdot \frac{d}{dy}\left(\frac{dy}{dx}\right) - \frac{\partial L}{\partial y} = 0 $
حالا این معادله را میتونیم با حل معادلات دیفرانسیلی مرتبه دو و با استفاده از شرایط اولیه یا مرزی به یک راه حل خاص برسونمشون. تهش میگه که تغییرات در ارتفاع نور نسبت به محور افقی y صفره
ببین چطور من پیش رفتم معادله لاگرانژ معین شده را حل کنم. $\begin{equation}
L = n_1 + \left(\frac{dy}{dx}\right)^2
\end{equation}$
حالا مشتقات مورد نیاز را محاسبه میکنم برات$\frac{\partial y}{\partial L} = 0 $
$\frac{dx}{dy} \left( \frac{\partial y'}{\partial L} \right) - \frac{\partial y}{\partial L} = 0$
ببین $0 - \frac{dx}{d}\left(2 \frac{dy}{dx} \frac{d}{dx} \left(\frac{dy}{dx}\right)\right) = 0 $
خوب اینو حل میکنم $\frac{dx}{d}\left(2 \frac{dy}{dx} \frac{d^2x}{dx^2} \left(\frac{dy}{dx}\right)^2 + \frac{dy}{dx} \frac{d}{dx}\left(\frac{dy}{dx}\right)\right) = 2 \left(\frac{dy^2}{dx^2}\right) \cdot \left(\frac{dy}{dx}\right)^2 + \frac{dy}{dx} \cdot \frac{d}{dx}\left(\frac{dy}{dx}\right)$
خوب ببین $2\left(\frac{dy^2}{dx^2} \left(\frac{d^2x}{dx^2}\right)^2 + \frac{dy}{dx} \frac{d}{dx}\left(\frac{dy}{dx}\right)\right) = 0$ معادله اویلر-لاگرانژ اینو میگه در اینجا به شکل خطی تغییرات ارتفاع نور نسبت به محور افقی صفر هستش
ببین میخوام بگم که مسیر نور از یک نقطه به نقطه دیگر که از وسط ۱ به وسط ۲ منتقل میشه به گونهای انتخاب میشه که یک متغیر اصلی را کمینه کنه. این متغیر میتونه مسافت یا زمان باشه.
خوب اصل فرما$\delta\int_{A}^{B} nds = 0 $ که در اینجا n شاخص شکسته ds عنصر مسیر و δ تغییر کوچک در مسیر را نشون میده. این اصل میگه که مسیر نور از نقطه A به نقطه B به گونهای انتخاب بشه که این انتخاب تغییری در شاخص شکست و مسیر را کمینه کنه.در مکانیک، اصل فرما (Principle of Least Action) در کلش میگه حرکت یک سیستم به طوریه که انتگرال اکشن (یا اکشن) برابر با کمترین مقدار ممکن باشه. .ببین که بین دو حالت مختلف یک سیستم مسیری انتخاب میشه که اکشنش کمترین مقدار را داشته باشه. $\delta\int_{t_1}^{t_2} L \, dt = 0 $
$n_1 \sin(\theta_1) = n_2 \sin(\theta_2)$
حالا بیا با لاگرانژ این معادله رو اثبات کنم برات. فرض کن t یه عدده کوچیک باشه که نشون میده چقدر نور از یه وسط به وسط دیگه انعکاس میکنه. میخواهیم مسیر نور رو از یه نقطه
A به یه نقطه B کمینه کنیم.خوب ببین اصل لاگرانژ میگه که ما باید یه تابع جدید بسازم که تفاضل مسیر نور و تعداد دفعات انعکاس نور رو کمینه کنه. اینجا منظور از تابع یه تابع انرژیه که در وسایل شفاف مختلف مختلفه.
با حل معادله اولین مشتق و استفاده از قانون انکسار نور به همون قانون شکست نور میرسم. این قانون همیشه به شکل $n_1 \sin(\theta_1) = n_2 \sin(\theta_2)$
برقراره. با اصل فرما و لاگرانژ یه روش خوب دربارهی قانون شکست نور بیارم براتون. پس فرض کن که نور از یه جا به جای دیگه میخواد بره و مسیری که طی میکنه رو با L نشون میدیم.
حالا فرض کن که دارم یه تابع از انرژی مسیر من دارم این تابع رو با L نشون میدم. اصل لاگرانژ میگه که وقتی این تابعو بین دو نقطهی A و B از فضا مینیمم میکنم مسیری که نور طی میکنه از اونجایی که این انتگرال صفره، مینیممه.
حالا از اصل اویلر-لاگرانژ استفاده میکنم. این اصل میگه که اگه یه متغیر توی یه تابع مختلفه میشه، تغییر اون تابع با توجه به تغییرات متغیرها به شکل خاصی اتفاق میافته. ما از این اصل استفاده میکنم تا معادلههای حرکت نور رو پیدا کنم.
این معادلهها به اون قانون شکست نور منتهی میشن که میگه که زمانی که نور از یه وسط شفاف به وسط دیگه میره، زوایای انعکاس و انکسار با هم مرتبطن
در اینجا n 1 و n2 شاخص شکست دو وسط مختلف وθ 1 و θ 2 زوایای شکست هستن ابتدا از اصل فرما استفاده میکنم. فرض کن یک ذره نور از نقطه A به نقطه B حرکت کند. مسیری که نور طی میکنه
L نشون میدم اصل فرما چی میکه که عبور نور از یک مسیر مینیمم کننده $\delta \int_{A}^{B} nds = 0 $
که در اینجا n شاخص شکست و ds افزونگی مسیره خوب الانه من از لاگرانژی استفاده میکنم برات$L = n_1 + \left( \frac{dx}{dy} \right)^2 $
y ارتفاع نور نسبت به محور x و x مختصات افقیه خوب کمی سختر شد بین $\frac{dx}{d} \left( \frac{\partial y'}{\partial L} \right) - \frac{\partial y}{\partial L} = 0 $
معادله اویلر-لاگرانژ اون این میشه$\frac{dx}{dy} \left( \frac{\partial y'}{\partial L} \right) - \frac{\partial y}{\partial L} = 0 $
حالا میخوام این معادله را حل کنم. ابتدا مشتقات جزئی را محاسبه میکنم:$\frac{dx}{dy} \left( \frac{\partial y'}{\partial L} \right) - \frac{\partial y}{\partial L} = 0 $
از قاعده زنجیری برای محاسبه این مشتقه $\frac{\partial L}{\partial y'} = 2 \frac{dy}{dx} \cdot \frac{\partial L}{\partial \left(\frac{dy}{dx}\right)}$
حالا معادله اویلر-لاگرانژ اینطورمیشه$\frac{dx}{dy} \left(2 \frac{dy}{dx} \cdot \frac{\partial L}{\partial \left(\frac{dy}{dx}\right)}\right) - \frac{\partial L}{\partial y} = 0 $
حالا مشتقه اول نسبت به x رابرات میارم$\frac{dx}{dy} \left(2 \frac{dy}{dx} \cdot \frac{\partial L}{\partial \left(\frac{dy}{dx}\right)}\right) = 2 \left(\frac{dy}{dx}\right)^2 \frac{d^2x}{dy^2} + \frac{dy}{dx} \cdot \frac{dy}{d}\left(\frac{dy}{dx}\right)
$پس معادله بهاین طور تغییر میکنه$2 \left(\frac{dy^2}{dx^2}\right) \cdot \left(\frac{dy}{dx}\right)^2 + \frac{dy}{dx} \cdot \frac{d}{dy}\left(\frac{dy}{dx}\right) - \frac{\partial L}{\partial y} = 0 $
حالا این معادله را میتونیم با حل معادلات دیفرانسیلی مرتبه دو و با استفاده از شرایط اولیه یا مرزی به یک راه حل خاص برسونمشون. تهش میگه که تغییرات در ارتفاع نور نسبت به محور افقی y صفره
ببین چطور من پیش رفتم معادله لاگرانژ معین شده را حل کنم. $\begin{equation}
L = n_1 + \left(\frac{dy}{dx}\right)^2
\end{equation}$
حالا مشتقات مورد نیاز را محاسبه میکنم برات$\frac{\partial y}{\partial L} = 0 $
$\frac{dx}{dy} \left( \frac{\partial y'}{\partial L} \right) - \frac{\partial y}{\partial L} = 0$
ببین $0 - \frac{dx}{d}\left(2 \frac{dy}{dx} \frac{d}{dx} \left(\frac{dy}{dx}\right)\right) = 0 $
خوب اینو حل میکنم $\frac{dx}{d}\left(2 \frac{dy}{dx} \frac{d^2x}{dx^2} \left(\frac{dy}{dx}\right)^2 + \frac{dy}{dx} \frac{d}{dx}\left(\frac{dy}{dx}\right)\right) = 2 \left(\frac{dy^2}{dx^2}\right) \cdot \left(\frac{dy}{dx}\right)^2 + \frac{dy}{dx} \cdot \frac{d}{dx}\left(\frac{dy}{dx}\right)$
خوب ببین $2\left(\frac{dy^2}{dx^2} \left(\frac{d^2x}{dx^2}\right)^2 + \frac{dy}{dx} \frac{d}{dx}\left(\frac{dy}{dx}\right)\right) = 0$ معادله اویلر-لاگرانژ اینو میگه در اینجا به شکل خطی تغییرات ارتفاع نور نسبت به محور افقی صفر هستش
ببین میخوام بگم که مسیر نور از یک نقطه به نقطه دیگر که از وسط ۱ به وسط ۲ منتقل میشه به گونهای انتخاب میشه که یک متغیر اصلی را کمینه کنه. این متغیر میتونه مسافت یا زمان باشه.
خوب اصل فرما$\delta\int_{A}^{B} nds = 0 $ که در اینجا n شاخص شکسته ds عنصر مسیر و δ تغییر کوچک در مسیر را نشون میده. این اصل میگه که مسیر نور از نقطه A به نقطه B به گونهای انتخاب بشه که این انتخاب تغییری در شاخص شکست و مسیر را کمینه کنه.در مکانیک، اصل فرما (Principle of Least Action) در کلش میگه حرکت یک سیستم به طوریه که انتگرال اکشن (یا اکشن) برابر با کمترین مقدار ممکن باشه. .ببین که بین دو حالت مختلف یک سیستم مسیری انتخاب میشه که اکشنش کمترین مقدار را داشته باشه. $\delta\int_{t_1}^{t_2} L \, dt = 0 $
آخرین ویرایش توسط rohamavation چهارشنبه ۱۴۰۲/۱۲/۹ - ۱۵:۵۳, ویرایش شده کلا 1 بار
-
rohamavation
نام: roham hesami radرهام حسامی راد
محل اقامت: 100 مایلی شمال لندن جاده آیلستون، لستر، لسترشر. LE2
عضویت : سهشنبه ۱۳۹۹/۸/۲۰ - ۰۸:۳۴
پست: 3288-
سپاس: 5494
- جنسیت:
تماس:
Re: معادله قانون شکست عمومی
اون چیزایی که گفتم برات باز کنم که چیه
ببین این اصل کمترین کنش یعنی اصل کنش ثابت، مثل یه قانون مقدسه در مکانیک. اینجا چی میگه؟ میگه وقتی یه سیستم حرکت میکنه، یه مسیر را انتخاب میکنه که اکشن (یعنی یه معیار خاصی که با انتگرال حرکت لاگرانژی مرتبطه) رو کمینه کنه. یعنی تو سیستمهای فیزیکی، اگه بخوای حرکتش رو بررسی کنی، باید به جای تمام مسیرهای ممکن، اون مسیری رو پیدا کنی که اکشنش کمترین باشه.
حالا این چی به معنای علمی میشه؟ ببین، این اصل برای همهی حالات حرکت سیستم اعمال میشه از مکانیک کلاسیک تا مکانیک کوانتومی. دیگه نه تنها میتونی با این اصل معادلات حرکت لاگرانژی رو به دست بیاری
یعنی با این اصل داریم میگیم، "اون سیستم به همون سمت حرکت میکنه که اکشنش کمترین باشه." این کمک میکنه تا حرکت سیستمها رو درکشون کنم و ازشون حداکثر بهرهمندی ببرم
اکشن در این مثال مرتبط با مسیر حرکت شی هستش. فرض کن که اکشن این شیء برابر با انتگرال انرژی کینتیک و پتانسیل گرانشی بر روی مسیر حرکت باشه
اصل کمترین کنش چی میگه
اصل کمترین کنش میگه که شیء در حال حرکت به گونهای است که مقدار این انتگرال (اکشن) به حداقل برسونه
معادلات حرکت:
با تعریف Lagrangian (تفاضل انرژی کینتیک و پتانسیل) و اعمال اصل کمترین کنش میتونی معادلات حرکت را به دست بیاری مثال . این معادلات به شیء این اجازه را میده که به گونهای سقوط کند که اکشنش کمینه بشه
مثلاً اگر ارتفاع اولیه اش سرعت اولیه اون و توان گرانشی مشخص باشن خوب با استفاده از اصل کمترین کنش میتونی مسیر حرکت و سرعت شیء در زمان را به دست بیاری
ببین یه مثال جذاب از اصل کمترین کنش در دینامیک میارم. فرض کن که یه اسکیتر در یک تپه نرم از ارتفاع H شروع به لغزیدن میکنه.
متغیرها:
x: موقعیت افقی اسکیتر (تا زمان t).y: موقعیت عمودی اسکیتر (ارتفاع از سطح زمین)، که تابعی از زمان است
$y(t).$ خوب L: Lagrangian سیستم (تفاضل انرژی کینتیک و پتانسیل). هست میدونی که L=T−U
حالاT: انرژی کینتیک اسکیتر (مربع سرعت تقسیم بر دو).U: انرژی پتانسیل گرانشی (برابر با ارتفاع از سطح زمین).
اصل کمترین کنش:میگه که اسکیتر مسیری را انتخاب میکنه که انتگرال از Lagrangian روی این مسیر به حداقل برسه
معادلات حرکتش $\[
\frac{d}{dt} \left( \frac{\partial L}{\partial \dot{x}} \right) - \frac{\partial L}{\partial x} = 0
\]$
$\[
\frac{d}{dt} \left( \frac{\partial L}{\partial \dot{y}} \right) - \frac{\partial L}{\partial y} = 0
\]$
این معادلات میتونن مسیر حرکت اسکیتر را تا زمان t مشخص کنن.
ببین برای حل معادلات نیاز به شرایط اولیه مثل موقعیت اولیه و سرعت اولیه دارم
اصل کمترین کنشPrinciple of Least Action در دینامیک میتونه معادلات حرکت را تعیینکنه و مسیر لغزش اسکیتر را بهینه کنه
خوب . اصل کمترین کنش میگه وقتی یه چیزی حرکت میکنه، انتخاب میکنه مسیری که کمترین تلاش رو براش به همراه داره. یعنی مثل اینه که تو یه بازی، ذره یا سیستم فیزیکی ما توی مسیری حرکت میکنه که "کمترین کار" یا "کمترین تلاش" رو انجام بدی. این اصل یکی از اصول پایهای در فیزیکه و خیلی از مسائل حرکت و دینامیک رو با استفاده از این اصل میشه حل کرد.
اصل فرما یعنی سیستم وقتی حرکت میکنه مسیری رو انتخاب میکنه که کمترین کار یا انرژی رو مصرف کنه. یعنی مثل اینه که اگه بخوای توی تپهای پایین بری، مسیری رو انتخاب میکنی که انرژی کمتری صرف کنی. مثلاً اگه یه اسکیتر توی یه تپه لغزش بخوره، اصل فرما میگه که اون اسکیتر مسیری رو انتخاب میکنه که کمترین انرژی رو مصرف کنه و به حداقل برسونه.
کمترین انرژی یا کمترین کار اصل فرما این فرض را داره که سیستم در طول حرکت خود مسیری را انتخاب میکنه که انرژی یا کار مصرفی کمتری داشته باشه.
متغیرهایش چی ها هست
در سیستمهای مختلف مفهوم انرژی یا کار ممکن است متفاوت باشه. در مکانیک ببین انرژی کینتیک و پتانسیل معمولاً در نظر گرفته میشه
انتگرال اکشن:
اصل فرما با استفاده از مفهوم انتگرال اکشن (Action Integral) ارتباط داره. انتگرال اکشن بر روی مسیر حرکتش تعبیری از کمترین کار یا انرژی مصرفی سیستمه
حتما! بیا یک مثال از دینامیک و اصل فرما رو براتون بنویسم:
فرض کنید یک ذرهای به نام a در میدان گرانشی (مثلاً نزدیک سطح زمین) حرکت میکنه. میخوام من با استفاده از اصل فرما معادلات حرکت این ذره را براتون میارم مدل رهامی ببین
تعریف متغیرها براتون گیج نشین x: موقعیت افقی ذره.y: موقعیت عمودی ذره.
L: Lagrangian (تفاضل انرژی کینتیک و پتانسیل گرانشی).
L=T−U خوب بازم بگم T: انرژی کینتیک ذره.
U: انرژی پتانسیل گرانشی.انرژی کینتیک:
$\[ T = \frac{1}{2} m \left( \dot{x}^2 + \dot{y}^2 \right) \] $
: تغییرات سرعتش در جهات افقی و عمودی.
انرژی پتانسیل گرانشی هم U=mgyاصل فرما میگه حرکت ذره روشیه که انتگرال اکشن $\int L \, dt $
روی مسیر واقعی به حداقل برسونه
تعریف اکشن چیه
اکشن (Action) در دینامیک به صورت تفاضل انرژی کینتیک و پتانسیل گرانشیه سیستم در طول حرکت تعریف میشه. برای یک ذره با Lagrangian خوب L، اکشن اینطوره$S = \int L \, dt $
نشوندهنده مقدار اکشن بر روی یک مسیر حرکته. این انتگرال بر روی تمام مسیرهای ممکن سیستم اعمال میشه
اصل فرما میگه که سیستم در حالت حرکته مسیری را انتخاب میکنه که این انتگرال اکشن را به حداقل میرسونه$δS=0$
حالا اصل هامیلتون میاد این اصلو رو ادامه میده. این اصل میگه که حرکت یه سیستم خیلی مثل یه معمای حسابیه که با یه تابع به اسم هامیلتون حل میشه. این تابع نشون میده چطور انرژی جنبشی و مختصات سیستم به هم مرتبطند. به این صورت میشه با یه حساب کلی دقت کرد و معادلات حرکت رو حل کرد.
اصل هامیلتون یه جور تلخی مثلان که از اصل کمترین کنش نتیجه میشه. این اصل میگه که مسیر حرکت یه سیستم، هر لحظه از حرکت، میتونه با استفاده از یه تابع خاص به اسم تابع هامیلتون توصیف بشه. این تابع هامیلتون معمولاً با H نشون داده میشه و تعدادی از ویژگیهای حرکت رو به ما نشون میده.ارتباطشون چیه
حالا اینجاست که اونچه گفتم جالب میشه! اصل هامیلتون، وقتی با اصل کمترین کنش ترکیب میشه خوب من راحت میتونم یه سری معادلات حرکت (که به اسم معادلات هامیلتون شناخته میشن) رو به دست بیارم. این معادلات به من نشون میدن که چطور مسیر واقعی حرکت بهترین مسیر ممکن رو انتخاب میکنه.
خوب بزار برات کاربرداشو تو رشته ای که میخونم برات شرح بدم
تو مسائل هوافضا، اصل کمترین کنش میگه باید کمترین انرژی و منابع رو برای انجام یه مأموریت استفاده کنم. این اصل خیلی مهمه چون منابع محدودی داریم و باید هوشمندانه ازشون استفاده کنمش.
حالا چطور میتونم این اصل رو در هوافضا رعایت کنم؟
مسیرها رو بهینه کن: برای هواپیماها یا فضاپیماها، بهتره مسیرهایی رو انتخاب کنم که زمان و انرژی کمتری ببره.
از فناوریهای جدید استفاده کن: از تکنولوژیهای نوین و پیشرفته استفاده کن که کارایی رو ببرن بالا، مثل موتورهای با کارایی بهتر یا سیستمهای هوشمند.
مدیریت خوب مصرف سوخت: بهینهسازی مصرف سوخت و استفاده از سوختهای با کارایی بالا برای کاهش مصرف و آلایندهها.
استفاده از انرژیهای تجدیدپذیر: از انرژیهای خورشیدی یا بادی استفاده کن تا به منابع طبیعی کمتر آسیب برسونیم.
بهبود ساختار و مصالح: از مصالح سبک و ساختارهای بهینه استفاده کن تا وزن رو کم کنمش و کارایی رو بالا ببرم
حالا بیا یکم اینو بگم. فرض کن یه هواپیما داری که میخوای از یه نقطه به نقطهای دیگه برسی، خب؟ حالا چطوری میتونی این کارو کنی که هم کمترین مقدار سوخت رو بزنی و هم سریعتر به مقصد برسی؟
به این کار دینامیک پرواز میگن. تو این محاسبات، ما سرعت، ارتفاع، زاویه کنترل، و اطلاعات دیگهای رو بهینه میکنم. مثلا ممکنه تصمیم بگیری تو بخشهایی از مسیر سرعت بیشتری داشته باشی و تو بخشهای دیگه کمتر. اینطوری میشه کمترین میزان سوخت رو مصرف کرد و بهترین کارایی رو داشت
حتما بیاین یک مثال ساده از دینامیک پرواز با استفاده از فرمول کمترین کنش بررسی کنم.
فرض کنید میخوام یک هواپیما از نقطه A به نقطه B برسه و میخوام مصرف سوخت را کمینه کنم. متغیرهای مهم در این مثال چی ها هستن
t : زمان
x : موقعیت افقی (مسافت)
ℎ : ارتفاع
v : سرعت
m : جرم هواپیما
u : سرعت عمودی (بهصورت مثبت به سمت بالا)
F سوخت : نیروی مصرف سوخت
F : نیروی مقاومت هوا
F : نیروی گرانش
که در این مثال از اصل کمترین کنش استفاده کردم خوب $\frac{d}{dt} \left( \frac{\partial L}{\partial \dot{q}_i} \right) - \frac{\partial L}{\partial q_i} = 0 $
ببین L تابع لاگرانژه خوب $dot{q}_i$ متغیرهای حرکت مستقل هستن $\dot{q}_i $
نشاندهنده تغییرات زمانی این متغیرها هستش حالا فرض کن که میخوام حرکت هواپیما را در یک بعد (برروی محور x) مدل کنم و تابع لاگرانژ L بیارم $L = m u^2 + v^2 + \lambda (h - h_0) + F_{\text{fuel}}(v) $حالا با استفاده از فرمول کمترین کنش و این تابع لاگرانژیش میتونم معادلات حرکت را بهینه کنم تا مصرف سوخت کمینه بشه
اصل فرما میگه هر سیستمی که تو زمان حرکت میکنه، مسیری رو دنبال میکنه که اکشنش (که یه عبارت مشخصه) رو به کمینه میرسونه. این اصل تو مکانیک کلاسیک استفاده میشه و میگه که حرکت واقعی سیستم از همه مسیرها، اون مسیریه که اکشنش کمینه میشه.
اصل همیلتون هم میگه که حرکت واقعی سیستم از بین تمام مسیرها، اون مسیریه که تابع همیلتونیانش (که یه تابع خاصه) رو به کمینه میرسونه. این اصل تو مکانیک کلاسیک و دینامیکهای مهندسی استفاده میشه.
مهمترین نکته اینه که این اصول توضیح میدن چطوری سیستمها در دنیای فیزیک حرکت میکنن و اینکه حرکت واقعی چطور انتخاب میشه.خلاصه مسایل زیادی هست یکی دیگه خیلی راحته
فرض کن یخ ماهواره در حال گردش به دور سیاره هست. هدفم کمینه کردن مصرف انرژی ماهواره هست . در دینامیک مدارها اصل همیلتون به کار میبرم$\delta \int_{t_1}^{t_2} L \, dt = 0 $
تابع لاگرانژ $L = \frac{1}{2} m \left( \dot{r}^2 + r^2 \dot{\theta}^2 \right) - \frac{r GMm}{2} $
ببین این اصل کمترین کنش یعنی اصل کنش ثابت، مثل یه قانون مقدسه در مکانیک. اینجا چی میگه؟ میگه وقتی یه سیستم حرکت میکنه، یه مسیر را انتخاب میکنه که اکشن (یعنی یه معیار خاصی که با انتگرال حرکت لاگرانژی مرتبطه) رو کمینه کنه. یعنی تو سیستمهای فیزیکی، اگه بخوای حرکتش رو بررسی کنی، باید به جای تمام مسیرهای ممکن، اون مسیری رو پیدا کنی که اکشنش کمترین باشه.
حالا این چی به معنای علمی میشه؟ ببین، این اصل برای همهی حالات حرکت سیستم اعمال میشه از مکانیک کلاسیک تا مکانیک کوانتومی. دیگه نه تنها میتونی با این اصل معادلات حرکت لاگرانژی رو به دست بیاری
یعنی با این اصل داریم میگیم، "اون سیستم به همون سمت حرکت میکنه که اکشنش کمترین باشه." این کمک میکنه تا حرکت سیستمها رو درکشون کنم و ازشون حداکثر بهرهمندی ببرم
اکشن در این مثال مرتبط با مسیر حرکت شی هستش. فرض کن که اکشن این شیء برابر با انتگرال انرژی کینتیک و پتانسیل گرانشی بر روی مسیر حرکت باشه
اصل کمترین کنش چی میگه
اصل کمترین کنش میگه که شیء در حال حرکت به گونهای است که مقدار این انتگرال (اکشن) به حداقل برسونه
معادلات حرکت:
با تعریف Lagrangian (تفاضل انرژی کینتیک و پتانسیل) و اعمال اصل کمترین کنش میتونی معادلات حرکت را به دست بیاری مثال . این معادلات به شیء این اجازه را میده که به گونهای سقوط کند که اکشنش کمینه بشه
مثلاً اگر ارتفاع اولیه اش سرعت اولیه اون و توان گرانشی مشخص باشن خوب با استفاده از اصل کمترین کنش میتونی مسیر حرکت و سرعت شیء در زمان را به دست بیاری
ببین یه مثال جذاب از اصل کمترین کنش در دینامیک میارم. فرض کن که یه اسکیتر در یک تپه نرم از ارتفاع H شروع به لغزیدن میکنه.
متغیرها:
x: موقعیت افقی اسکیتر (تا زمان t).y: موقعیت عمودی اسکیتر (ارتفاع از سطح زمین)، که تابعی از زمان است
$y(t).$ خوب L: Lagrangian سیستم (تفاضل انرژی کینتیک و پتانسیل). هست میدونی که L=T−U
حالاT: انرژی کینتیک اسکیتر (مربع سرعت تقسیم بر دو).U: انرژی پتانسیل گرانشی (برابر با ارتفاع از سطح زمین).
اصل کمترین کنش:میگه که اسکیتر مسیری را انتخاب میکنه که انتگرال از Lagrangian روی این مسیر به حداقل برسه
معادلات حرکتش $\[
\frac{d}{dt} \left( \frac{\partial L}{\partial \dot{x}} \right) - \frac{\partial L}{\partial x} = 0
\]$
$\[
\frac{d}{dt} \left( \frac{\partial L}{\partial \dot{y}} \right) - \frac{\partial L}{\partial y} = 0
\]$
این معادلات میتونن مسیر حرکت اسکیتر را تا زمان t مشخص کنن.
ببین برای حل معادلات نیاز به شرایط اولیه مثل موقعیت اولیه و سرعت اولیه دارم
اصل کمترین کنشPrinciple of Least Action در دینامیک میتونه معادلات حرکت را تعیینکنه و مسیر لغزش اسکیتر را بهینه کنه
خوب . اصل کمترین کنش میگه وقتی یه چیزی حرکت میکنه، انتخاب میکنه مسیری که کمترین تلاش رو براش به همراه داره. یعنی مثل اینه که تو یه بازی، ذره یا سیستم فیزیکی ما توی مسیری حرکت میکنه که "کمترین کار" یا "کمترین تلاش" رو انجام بدی. این اصل یکی از اصول پایهای در فیزیکه و خیلی از مسائل حرکت و دینامیک رو با استفاده از این اصل میشه حل کرد.
اصل فرما یعنی سیستم وقتی حرکت میکنه مسیری رو انتخاب میکنه که کمترین کار یا انرژی رو مصرف کنه. یعنی مثل اینه که اگه بخوای توی تپهای پایین بری، مسیری رو انتخاب میکنی که انرژی کمتری صرف کنی. مثلاً اگه یه اسکیتر توی یه تپه لغزش بخوره، اصل فرما میگه که اون اسکیتر مسیری رو انتخاب میکنه که کمترین انرژی رو مصرف کنه و به حداقل برسونه.
کمترین انرژی یا کمترین کار اصل فرما این فرض را داره که سیستم در طول حرکت خود مسیری را انتخاب میکنه که انرژی یا کار مصرفی کمتری داشته باشه.
متغیرهایش چی ها هست
در سیستمهای مختلف مفهوم انرژی یا کار ممکن است متفاوت باشه. در مکانیک ببین انرژی کینتیک و پتانسیل معمولاً در نظر گرفته میشه
انتگرال اکشن:
اصل فرما با استفاده از مفهوم انتگرال اکشن (Action Integral) ارتباط داره. انتگرال اکشن بر روی مسیر حرکتش تعبیری از کمترین کار یا انرژی مصرفی سیستمه
حتما! بیا یک مثال از دینامیک و اصل فرما رو براتون بنویسم:
فرض کنید یک ذرهای به نام a در میدان گرانشی (مثلاً نزدیک سطح زمین) حرکت میکنه. میخوام من با استفاده از اصل فرما معادلات حرکت این ذره را براتون میارم مدل رهامی ببین
تعریف متغیرها براتون گیج نشین x: موقعیت افقی ذره.y: موقعیت عمودی ذره.
L: Lagrangian (تفاضل انرژی کینتیک و پتانسیل گرانشی).
L=T−U خوب بازم بگم T: انرژی کینتیک ذره.
U: انرژی پتانسیل گرانشی.انرژی کینتیک:
$\[ T = \frac{1}{2} m \left( \dot{x}^2 + \dot{y}^2 \right) \] $
: تغییرات سرعتش در جهات افقی و عمودی.
انرژی پتانسیل گرانشی هم U=mgyاصل فرما میگه حرکت ذره روشیه که انتگرال اکشن $\int L \, dt $
روی مسیر واقعی به حداقل برسونه
تعریف اکشن چیه
اکشن (Action) در دینامیک به صورت تفاضل انرژی کینتیک و پتانسیل گرانشیه سیستم در طول حرکت تعریف میشه. برای یک ذره با Lagrangian خوب L، اکشن اینطوره$S = \int L \, dt $
نشوندهنده مقدار اکشن بر روی یک مسیر حرکته. این انتگرال بر روی تمام مسیرهای ممکن سیستم اعمال میشه
اصل فرما میگه که سیستم در حالت حرکته مسیری را انتخاب میکنه که این انتگرال اکشن را به حداقل میرسونه$δS=0$
حالا اصل هامیلتون میاد این اصلو رو ادامه میده. این اصل میگه که حرکت یه سیستم خیلی مثل یه معمای حسابیه که با یه تابع به اسم هامیلتون حل میشه. این تابع نشون میده چطور انرژی جنبشی و مختصات سیستم به هم مرتبطند. به این صورت میشه با یه حساب کلی دقت کرد و معادلات حرکت رو حل کرد.
اصل هامیلتون یه جور تلخی مثلان که از اصل کمترین کنش نتیجه میشه. این اصل میگه که مسیر حرکت یه سیستم، هر لحظه از حرکت، میتونه با استفاده از یه تابع خاص به اسم تابع هامیلتون توصیف بشه. این تابع هامیلتون معمولاً با H نشون داده میشه و تعدادی از ویژگیهای حرکت رو به ما نشون میده.ارتباطشون چیه
حالا اینجاست که اونچه گفتم جالب میشه! اصل هامیلتون، وقتی با اصل کمترین کنش ترکیب میشه خوب من راحت میتونم یه سری معادلات حرکت (که به اسم معادلات هامیلتون شناخته میشن) رو به دست بیارم. این معادلات به من نشون میدن که چطور مسیر واقعی حرکت بهترین مسیر ممکن رو انتخاب میکنه.
خوب بزار برات کاربرداشو تو رشته ای که میخونم برات شرح بدم
تو مسائل هوافضا، اصل کمترین کنش میگه باید کمترین انرژی و منابع رو برای انجام یه مأموریت استفاده کنم. این اصل خیلی مهمه چون منابع محدودی داریم و باید هوشمندانه ازشون استفاده کنمش.
حالا چطور میتونم این اصل رو در هوافضا رعایت کنم؟
مسیرها رو بهینه کن: برای هواپیماها یا فضاپیماها، بهتره مسیرهایی رو انتخاب کنم که زمان و انرژی کمتری ببره.
از فناوریهای جدید استفاده کن: از تکنولوژیهای نوین و پیشرفته استفاده کن که کارایی رو ببرن بالا، مثل موتورهای با کارایی بهتر یا سیستمهای هوشمند.
مدیریت خوب مصرف سوخت: بهینهسازی مصرف سوخت و استفاده از سوختهای با کارایی بالا برای کاهش مصرف و آلایندهها.
استفاده از انرژیهای تجدیدپذیر: از انرژیهای خورشیدی یا بادی استفاده کن تا به منابع طبیعی کمتر آسیب برسونیم.
بهبود ساختار و مصالح: از مصالح سبک و ساختارهای بهینه استفاده کن تا وزن رو کم کنمش و کارایی رو بالا ببرم
حالا بیا یکم اینو بگم. فرض کن یه هواپیما داری که میخوای از یه نقطه به نقطهای دیگه برسی، خب؟ حالا چطوری میتونی این کارو کنی که هم کمترین مقدار سوخت رو بزنی و هم سریعتر به مقصد برسی؟
به این کار دینامیک پرواز میگن. تو این محاسبات، ما سرعت، ارتفاع، زاویه کنترل، و اطلاعات دیگهای رو بهینه میکنم. مثلا ممکنه تصمیم بگیری تو بخشهایی از مسیر سرعت بیشتری داشته باشی و تو بخشهای دیگه کمتر. اینطوری میشه کمترین میزان سوخت رو مصرف کرد و بهترین کارایی رو داشت
حتما بیاین یک مثال ساده از دینامیک پرواز با استفاده از فرمول کمترین کنش بررسی کنم.
فرض کنید میخوام یک هواپیما از نقطه A به نقطه B برسه و میخوام مصرف سوخت را کمینه کنم. متغیرهای مهم در این مثال چی ها هستن
t : زمان
x : موقعیت افقی (مسافت)
ℎ : ارتفاع
v : سرعت
m : جرم هواپیما
u : سرعت عمودی (بهصورت مثبت به سمت بالا)
F سوخت : نیروی مصرف سوخت
F : نیروی مقاومت هوا
F : نیروی گرانش
که در این مثال از اصل کمترین کنش استفاده کردم خوب $\frac{d}{dt} \left( \frac{\partial L}{\partial \dot{q}_i} \right) - \frac{\partial L}{\partial q_i} = 0 $
ببین L تابع لاگرانژه خوب $dot{q}_i$ متغیرهای حرکت مستقل هستن $\dot{q}_i $
نشاندهنده تغییرات زمانی این متغیرها هستش حالا فرض کن که میخوام حرکت هواپیما را در یک بعد (برروی محور x) مدل کنم و تابع لاگرانژ L بیارم $L = m u^2 + v^2 + \lambda (h - h_0) + F_{\text{fuel}}(v) $حالا با استفاده از فرمول کمترین کنش و این تابع لاگرانژیش میتونم معادلات حرکت را بهینه کنم تا مصرف سوخت کمینه بشه
اصل فرما میگه هر سیستمی که تو زمان حرکت میکنه، مسیری رو دنبال میکنه که اکشنش (که یه عبارت مشخصه) رو به کمینه میرسونه. این اصل تو مکانیک کلاسیک استفاده میشه و میگه که حرکت واقعی سیستم از همه مسیرها، اون مسیریه که اکشنش کمینه میشه.
اصل همیلتون هم میگه که حرکت واقعی سیستم از بین تمام مسیرها، اون مسیریه که تابع همیلتونیانش (که یه تابع خاصه) رو به کمینه میرسونه. این اصل تو مکانیک کلاسیک و دینامیکهای مهندسی استفاده میشه.
مهمترین نکته اینه که این اصول توضیح میدن چطوری سیستمها در دنیای فیزیک حرکت میکنن و اینکه حرکت واقعی چطور انتخاب میشه.خلاصه مسایل زیادی هست یکی دیگه خیلی راحته
فرض کن یخ ماهواره در حال گردش به دور سیاره هست. هدفم کمینه کردن مصرف انرژی ماهواره هست . در دینامیک مدارها اصل همیلتون به کار میبرم$\delta \int_{t_1}^{t_2} L \, dt = 0 $
تابع لاگرانژ $L = \frac{1}{2} m \left( \dot{r}^2 + r^2 \dot{\theta}^2 \right) - \frac{r GMm}{2} $
-
rohamavation
نام: roham hesami radرهام حسامی راد
محل اقامت: 100 مایلی شمال لندن جاده آیلستون، لستر، لسترشر. LE2
عضویت : سهشنبه ۱۳۹۹/۸/۲۰ - ۰۸:۳۴
پست: 3288-
سپاس: 5494
- جنسیت:
تماس:
Re: معادله قانون شکست عمومی
من تو پست بالااینجا افزونگی augmentationمنظورش یه چیز زاعد و اعمال محدودیته یعنی ریداندانت را برات بگم محدودیتهای اضافی به عنوان آن دسته از محدودیتهایی تعریف میشن که میتونن بدون تغییر در سینماتیک مکانیسم حذف بشن.چی هستش ریداندانت اینجا محدودیت میزارم چیز راعد و اضافی معنیشه
"محدوده حرکت یا همون مسیرها، خیلی وقتا تو مکانیک کلاسیک به کار میاد. اینجا میگن که وقتی یه جسم حرکت میکنه مسیرش یه محدوده خاصی داره. یعنی نمیتونه هر جا که بخواد بره. حالا این مسیرها با استفاده از اصولی که حاکم بر حرکت سیستمها هستن، مشخص میشن.
اگه تو مسیر حرکت یک سیستم یه مقدار خاص رو (مثلاً انرژی یا شاید مسیر خودش) ثابت نگه داریم، این مقدار رو به عنوان ریداندانت میشناسن. ریداندانت واقعا همون چیزیه که در طول حرکت سیستم حفظ میمونه. توصیف حالتها و تغییرات یک سیستم در طول زمان استفاده میشه.وقتی یک متغیر یا پارامتر در تابع لاگرانژ نقش محدودی ایفا میکنه و به عنوان یک ثابت در معادلات حرکت وارد نمیشه خوب این متغیر به عنوان یک ریداندانت حساب میشه. ببین ریداندانت یعنیت که معادلات حرکت از این متغیر وابسته نیستند و بنابراین این متغیر در حین حرکت حفظ میشه
"حالا بریم سراغ یک مثال در دینامیک لاگرانژی با استفاده از افزونگی مسیر. فرض کنید یه ذره داریم که تو یک مخروط حرکت میکنه. سرعتش هم یه مقدار ثابته به اسم r. حالا ما میخواهیم یه مسیر پیدا کنیم که زمان حرکت این ذره از یه نقطه به نقطهای دیگه کمینه بشه.
تابع لاگرانژ رو میسازیم که اینطوریه: مقدار انتگرال از یک تابع با توان دو از r و تغییر زمانی زاویه توی یه بازهٔ زمانی. حالا با استفاده از اصل فرما (که دقیقاً اون معادلاتی هستن که نوشتیم) مسیر بهینه رو پیدا میکنیم.
حالا اگه بخوایم این مسئله رو به عنوان یک مسئله ریداندانت مسیر حل کنیم، یعنی یک محدودیت اضافه کنم مثلاً یه ریداندانت که تغییر زمانی زاویه رو محدود کنه. این ریداندانت رو به تابع لاگرانژ اضافه میکنیم و مسیر جدید رو به توجه به این محدودیت بهینه میکنیم. این ریداندانت چون وظیفهاش اینه که مسیر رو با محدود کردن تغییر زمانی زاویه بهینه کنه. گفتم سرعت ثابت درسته پس $L(r, \theta, \dot{\theta}) = \int_{A}^{B} \frac{1}{1 + r^2} \dot{\theta}^2 \, dt $ اینجا r فاصله از محور مخروطه θ زاویه مخروطه و $\dot{\theta} $ تغییر زمانی زاویه هستش ببین لاگرانژیش $\frac{\partial L}{\partial r} - \frac{d}{dt} \left(\frac{\partial L}{\partial \dot{r}}\right) = 0 $و$\frac{\partial \theta}{\partial L} - \frac{d}{dt} \left(\frac{\partial \dot{\theta}}{\partial L}\right) = 0 $اگر این مسئله را به عنوان یه redundant" (ریداندانت) مسیر بخوام حل کنم ممکه (ریداندانت) $\mathcal{L}(r, \theta, \dot{\theta}) + g(r, \theta, \dot{\theta}) $
به تابع لاگرانژ اضافه کنم. این افزونگی ممکنه یه محدودیت بر روی مسیر باشه که تغییر زمانی زاویه را محدود کنه خوب بعد میتونی بر حسب اینا حلش کنی که من دیگه نیاوردم اما تهش بگم . با حل معادلات اصل فرما که مسیر بهینه برای حرکت ذره در مخروط با سرعت ثابته مسیری خطیه که زاویهٔ مخروط در طول این مسیر ثابت باقی میمونه. پس میگه نشون دهنده پایداری حرکت بهینه در این مسئلیه
یا بگم حرکت یه ربات که خروجیش با موانع تداخل نداشته باشه محدودیت زاویه ها یا طول بازو ساده بود نه
"محدوده حرکت یا همون مسیرها، خیلی وقتا تو مکانیک کلاسیک به کار میاد. اینجا میگن که وقتی یه جسم حرکت میکنه مسیرش یه محدوده خاصی داره. یعنی نمیتونه هر جا که بخواد بره. حالا این مسیرها با استفاده از اصولی که حاکم بر حرکت سیستمها هستن، مشخص میشن.
اگه تو مسیر حرکت یک سیستم یه مقدار خاص رو (مثلاً انرژی یا شاید مسیر خودش) ثابت نگه داریم، این مقدار رو به عنوان ریداندانت میشناسن. ریداندانت واقعا همون چیزیه که در طول حرکت سیستم حفظ میمونه. توصیف حالتها و تغییرات یک سیستم در طول زمان استفاده میشه.وقتی یک متغیر یا پارامتر در تابع لاگرانژ نقش محدودی ایفا میکنه و به عنوان یک ثابت در معادلات حرکت وارد نمیشه خوب این متغیر به عنوان یک ریداندانت حساب میشه. ببین ریداندانت یعنیت که معادلات حرکت از این متغیر وابسته نیستند و بنابراین این متغیر در حین حرکت حفظ میشه
"حالا بریم سراغ یک مثال در دینامیک لاگرانژی با استفاده از افزونگی مسیر. فرض کنید یه ذره داریم که تو یک مخروط حرکت میکنه. سرعتش هم یه مقدار ثابته به اسم r. حالا ما میخواهیم یه مسیر پیدا کنیم که زمان حرکت این ذره از یه نقطه به نقطهای دیگه کمینه بشه.
تابع لاگرانژ رو میسازیم که اینطوریه: مقدار انتگرال از یک تابع با توان دو از r و تغییر زمانی زاویه توی یه بازهٔ زمانی. حالا با استفاده از اصل فرما (که دقیقاً اون معادلاتی هستن که نوشتیم) مسیر بهینه رو پیدا میکنیم.
حالا اگه بخوایم این مسئله رو به عنوان یک مسئله ریداندانت مسیر حل کنیم، یعنی یک محدودیت اضافه کنم مثلاً یه ریداندانت که تغییر زمانی زاویه رو محدود کنه. این ریداندانت رو به تابع لاگرانژ اضافه میکنیم و مسیر جدید رو به توجه به این محدودیت بهینه میکنیم. این ریداندانت چون وظیفهاش اینه که مسیر رو با محدود کردن تغییر زمانی زاویه بهینه کنه. گفتم سرعت ثابت درسته پس $L(r, \theta, \dot{\theta}) = \int_{A}^{B} \frac{1}{1 + r^2} \dot{\theta}^2 \, dt $ اینجا r فاصله از محور مخروطه θ زاویه مخروطه و $\dot{\theta} $ تغییر زمانی زاویه هستش ببین لاگرانژیش $\frac{\partial L}{\partial r} - \frac{d}{dt} \left(\frac{\partial L}{\partial \dot{r}}\right) = 0 $و$\frac{\partial \theta}{\partial L} - \frac{d}{dt} \left(\frac{\partial \dot{\theta}}{\partial L}\right) = 0 $اگر این مسئله را به عنوان یه redundant" (ریداندانت) مسیر بخوام حل کنم ممکه (ریداندانت) $\mathcal{L}(r, \theta, \dot{\theta}) + g(r, \theta, \dot{\theta}) $
به تابع لاگرانژ اضافه کنم. این افزونگی ممکنه یه محدودیت بر روی مسیر باشه که تغییر زمانی زاویه را محدود کنه خوب بعد میتونی بر حسب اینا حلش کنی که من دیگه نیاوردم اما تهش بگم . با حل معادلات اصل فرما که مسیر بهینه برای حرکت ذره در مخروط با سرعت ثابته مسیری خطیه که زاویهٔ مخروط در طول این مسیر ثابت باقی میمونه. پس میگه نشون دهنده پایداری حرکت بهینه در این مسئلیه
یا بگم حرکت یه ربات که خروجیش با موانع تداخل نداشته باشه محدودیت زاویه ها یا طول بازو ساده بود نه
-
rohamavation
نام: roham hesami radرهام حسامی راد
محل اقامت: 100 مایلی شمال لندن جاده آیلستون، لستر، لسترشر. LE2
عضویت : سهشنبه ۱۳۹۹/۸/۲۰ - ۰۸:۳۴
پست: 3288-
سپاس: 5494
- جنسیت:
تماس:
Re: معادله قانون شکست عمومی
فرض کن شما یک کوهنورد هستین خوب حالا میخواین از پایین کوه به قله برسین. هدف شما کاهش زمانیه که برای صعود به قله طول میکشه. غیر این که نیست شما با یکسری محدودیتهایی مواجه میشین مثل سنگهای بزرگ که نباید بر روی اونا حرکت کنی یا باید از شون عبور کنی
مفهوم اوگمِنتیشن در اینجا به کمک میکنه. مثلاً شما ممکنه بخواهید مسیر صعودی خود را به گونهای انتخاب کنین که از موانع طبیعی و سنگها دوری کنین چیکار میکنی باید از مهارتات لستفاده کنی دیگه مسیر درست و بهترین انتخاب میکنی تا زمان رسیدن به قله کمترین بشه پس همون اوگمِنتیشن نشون رسیدن شما به قله هست در حالی که شما محدودیتهای موجود را رعایت میکنی.خوب اوگمِنتیشن در زمینه دینامیک بدنه های صلب به افزودن اجزا یا عناصر تکمیلی به یک سیستم برای بهتر و کارامدتر شدن یا اصلاح رفتارش اشاره میکنه . میشه شامل وارد کردن نیروهاو محدودیت ها یا درجات آزادی اضافی به سیستم اصلی به منظور دستیابی به اهدافت باشه .
افزایش کنترل تو دینامیک کنترل ممکنه از افزونه کنترلی استفاده بشه تا پایداری عملکرد ردیابی یا خصوصیات دیگهای از سیستم رو بهبود بدیم. مثلا میشه نیروها یا ممانهای کنترلی رو به سیستم اضافه کرد.
افزایش ساختاری: اضافه کردن عناصر یا اجزاء ساختاری به یک سیستم میتونه به بهبود مقاومت، سختی یا خصوصیات ارتعاشی اجسام صلب کمک کنه.
افزایش حسگر: افزایش تعداد حسگرها یا دستگاههای اندازهگیری به سیستم اطلاعات دقیقتری رو برای استفاده در فرآیند کنترل فراهم میکنه.
افزایش اکتوئاتور: .تو علم رباتیک اکتوئاتور میتونه موتور، سروموتور یا حتی سیستمهای هیدرولیک یا پنوماتیک باشه. وقتی میگیم افزایش اکتوئاتور منظور اینه که مثلاً موتورهای قدرتمندتر سروموتورهای بهتر یا حتی از تکنولوژیهای پیشرفتهتر برای بهبود کنترل و عملکرد سیستم استفاده بشه. یعنی با افزایش اکتوئاتور قابلیت سیستم برای انجام حرکات دقیقترش قدرتمندتر و با بهرهوری بیشتر افزایش پیدا میکنه.
افزایش پویایی یعنی میخواهیم رفتارهای دینامیکی مدل روبات را با افزودن عواملی مثل اصطکاک گشتاورهای خارجی یا تغییرات دیگر تغییر بدیم. هرکدوم از این حالتها بسته به هدف خاصی که برای سیستم در نظر گرفته شده، ممکنه استفاده بشه. مثالا با اضافه کردن یک کنترلر PID به مدل دینامیکی ربات میتونیم بهتر و دقیقتر حرکاتش را کنترل کنیم. این کنترلر افزایشی را به مدل اصلی اضافه کنیم تا تغییرات موقعیت و سرعت ربات را بهبود بخشیم. یعنی این اوگمِنتیشن نشون از اضافه کردن یک عنصر کنترلی به سیستم اصلی داره تا بهبودهای مطلوب در کنترل حرکت را بخوبی فراهم کنه.
یه مثال دیگه
فرض کنید یک هواپیمای تجاری داریم که داره میخواد از یه شهر به شهر دیگه پرواز کنه. حالا ما میخواهیم این سفر رو امن و با اطمینان بالا برگزار کنیم. تو این موقع، افزونگی و ریدانس دوتا مفهومه که بهمون کمک میکنن.
اوگمِنتیشن (Augmentation):
سیستم کنترل هواپیما با افزونگی میتونه از حسگرهای بهتر، سیستمهای GPS پیشرفتهتر و فناوریهای بهتر برای کنترل پرواز استفاده کنه. این افزونگی باعث میشه که سیستم بهتر و دقیقتر در شرایط مختلف هوایی عمل کنه.
ریدانس (Redundancy):
برای افزایش امنیت، هواپیما میتونه اجزاء تکراری داشته باشه. اگر یک سیستم کنترل اصلی خراب بشه یه سیستم کنترل ریدانت میتونه وظایفش رو به عهده بگیره و کنترل هواپیما رو انجام بده. همچنین اگه یکی از موتورها مشکل داشته باشه وجود موتورهای دیگه به صورت ریدانت به هواپیما این امکان رو میده که پرواز رو ادامه بده.
به این ترتیب افزونگی با بهبود عملکرد اصلی سیستم و ریدانس با اضافه کردن اجزاء یا سیستمهای تکراری به سیستم اصلی، به امنیت و قابلیت اطمینان در سفر هواپیما کمک میکنن
مفهوم اوگمِنتیشن در اینجا به کمک میکنه. مثلاً شما ممکنه بخواهید مسیر صعودی خود را به گونهای انتخاب کنین که از موانع طبیعی و سنگها دوری کنین چیکار میکنی باید از مهارتات لستفاده کنی دیگه مسیر درست و بهترین انتخاب میکنی تا زمان رسیدن به قله کمترین بشه پس همون اوگمِنتیشن نشون رسیدن شما به قله هست در حالی که شما محدودیتهای موجود را رعایت میکنی.خوب اوگمِنتیشن در زمینه دینامیک بدنه های صلب به افزودن اجزا یا عناصر تکمیلی به یک سیستم برای بهتر و کارامدتر شدن یا اصلاح رفتارش اشاره میکنه . میشه شامل وارد کردن نیروهاو محدودیت ها یا درجات آزادی اضافی به سیستم اصلی به منظور دستیابی به اهدافت باشه .
افزایش کنترل تو دینامیک کنترل ممکنه از افزونه کنترلی استفاده بشه تا پایداری عملکرد ردیابی یا خصوصیات دیگهای از سیستم رو بهبود بدیم. مثلا میشه نیروها یا ممانهای کنترلی رو به سیستم اضافه کرد.
افزایش ساختاری: اضافه کردن عناصر یا اجزاء ساختاری به یک سیستم میتونه به بهبود مقاومت، سختی یا خصوصیات ارتعاشی اجسام صلب کمک کنه.
افزایش حسگر: افزایش تعداد حسگرها یا دستگاههای اندازهگیری به سیستم اطلاعات دقیقتری رو برای استفاده در فرآیند کنترل فراهم میکنه.
افزایش اکتوئاتور: .تو علم رباتیک اکتوئاتور میتونه موتور، سروموتور یا حتی سیستمهای هیدرولیک یا پنوماتیک باشه. وقتی میگیم افزایش اکتوئاتور منظور اینه که مثلاً موتورهای قدرتمندتر سروموتورهای بهتر یا حتی از تکنولوژیهای پیشرفتهتر برای بهبود کنترل و عملکرد سیستم استفاده بشه. یعنی با افزایش اکتوئاتور قابلیت سیستم برای انجام حرکات دقیقترش قدرتمندتر و با بهرهوری بیشتر افزایش پیدا میکنه.
افزایش پویایی یعنی میخواهیم رفتارهای دینامیکی مدل روبات را با افزودن عواملی مثل اصطکاک گشتاورهای خارجی یا تغییرات دیگر تغییر بدیم. هرکدوم از این حالتها بسته به هدف خاصی که برای سیستم در نظر گرفته شده، ممکنه استفاده بشه. مثالا با اضافه کردن یک کنترلر PID به مدل دینامیکی ربات میتونیم بهتر و دقیقتر حرکاتش را کنترل کنیم. این کنترلر افزایشی را به مدل اصلی اضافه کنیم تا تغییرات موقعیت و سرعت ربات را بهبود بخشیم. یعنی این اوگمِنتیشن نشون از اضافه کردن یک عنصر کنترلی به سیستم اصلی داره تا بهبودهای مطلوب در کنترل حرکت را بخوبی فراهم کنه.
یه مثال دیگه
فرض کنید یک هواپیمای تجاری داریم که داره میخواد از یه شهر به شهر دیگه پرواز کنه. حالا ما میخواهیم این سفر رو امن و با اطمینان بالا برگزار کنیم. تو این موقع، افزونگی و ریدانس دوتا مفهومه که بهمون کمک میکنن.
اوگمِنتیشن (Augmentation):
سیستم کنترل هواپیما با افزونگی میتونه از حسگرهای بهتر، سیستمهای GPS پیشرفتهتر و فناوریهای بهتر برای کنترل پرواز استفاده کنه. این افزونگی باعث میشه که سیستم بهتر و دقیقتر در شرایط مختلف هوایی عمل کنه.
ریدانس (Redundancy):
برای افزایش امنیت، هواپیما میتونه اجزاء تکراری داشته باشه. اگر یک سیستم کنترل اصلی خراب بشه یه سیستم کنترل ریدانت میتونه وظایفش رو به عهده بگیره و کنترل هواپیما رو انجام بده. همچنین اگه یکی از موتورها مشکل داشته باشه وجود موتورهای دیگه به صورت ریدانت به هواپیما این امکان رو میده که پرواز رو ادامه بده.
به این ترتیب افزونگی با بهبود عملکرد اصلی سیستم و ریدانس با اضافه کردن اجزاء یا سیستمهای تکراری به سیستم اصلی، به امنیت و قابلیت اطمینان در سفر هواپیما کمک میکنن