

اما چرا جناح راست زاویه حمله را افزایش می دهد؟ من فکر میکنم این امکان وجود ندارد زیرا جریان لغزش جانبی نسبت به جریان اصلی در سطح متفاوتی است.
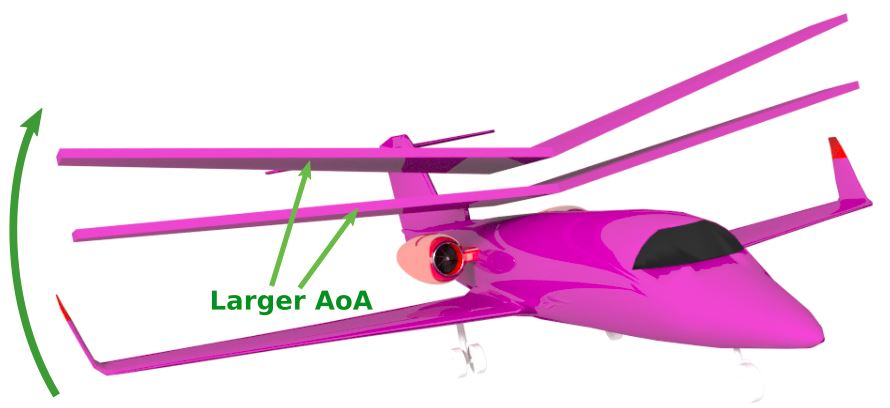
توضیح در این واقعیت نهفته است که یک بال نورد شده یک باد نسبی مورب ایجاد می کند، و اینکه بال با زاویه دو وجهی که از جهت مایل دیده می شود، زاویه حمله بیشتری به طرف در این جهت دارد:
نگاه کردن به بال ها با زاویه دو وجهی، از جهت باد
به دلیل زاویه دو وجهی، برای بادهایی که از جهت مایل در سمت راست هواپیما می آید، بال راست AoA بزرگتری را نشان می دهد. این حتی برای یک زاویه دو وجهی بزرگتر مهم است.
در سمت چپ، هواپیمای افقی، در سطح پرواز و در باد مخالف وجود دارد. بدیهی است که عمل باد در هر دو بال یکسان خواهد بود، صرف نظر از زاویه دو وجهی، و بردار بالابر به صورت عمودی (به رنگ آبی) جهت گیری می کند.
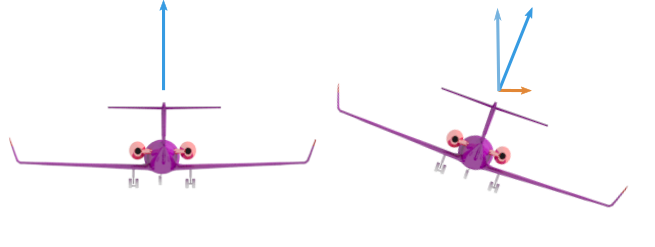
در سمت راست، هواپیما مختل شده است و به دلایلی اکنون بدون اقدام خلبان به سمت راست می چرخد. تصور کنید عنوان همچنان همان است.
بر روی بال های افقی و نورد شده بلند کنید
نکته کلیدی برای اینکه ببینیم چه اتفاقی خواهد افتاد این است که بفهمیم بال راست اکنون بیشتر از بال چپ بلندتر می شود و این تفاوت متناسب با زاویه دو وجهی است. به محض مشخص شدن این موضوع، میتوانیم پیشبینی کنیم که زاویه چرخش بهطور خودکار، بدون اقدام آزمایشی، لغو شود.
بیایید به هواپیمای نورد شده نگاه کنیم:
بردار بالابر که هنوز برای بال عادی است، دیگر عمودی نیست. از نقطه نظر ریاضی می توان آن را در جهت های دلخواه به دو جزء تقسیم کرد. اگر رزولوشن را در امتداد محورهای عمودی و افقی انتخاب کنیم، می بینیم که جزء عمودی اکنون کوچکتر شده است (بنابراین هواپیما شروع به فرود می کند) و یک جزء افقی در این فرآیند ظاهر می شود.
جزء افقی هواپیما را به سمت راست می کشد. از آنجایی که مسیر هواپیما تغییر نکرده است، هواپیما در چرخش نیست، و هیچ نیروی گریز از مرکز با این جزء افقی بالابر مخالفت نمی کند، بنابراین هواپیما شروع به لغزش از طرف می کند و باد نسبی دیگر باد مخالف نیست، مقداری باد متقابل از سمت راست وجود دارد. سمت.
زاویه حمله که از نقطه نظر باد نسبی دیده می شود:
هنگامی که هواپیما در باد مخالف پرواز می کرد، زاویه حمله برای هر دو بال یکسان بود.
با مولفه باد متقابل، زاویه حمله بال راست بیشتر از زاویه حمله بال چپ است. این تفاوت زمانی که زاویه دو وجهی کوچک است کم است و با مقدار آن افزایش می یابد. برای آشکار شدن این موضوع، بالهایی با زوایای دو وجهی بالاتر به هواپیما اضافه کردم:
نگاه کردن به بال ها با زاویه دو وجهی، از جهت باد
توجه: تفاوت فقط زمانی ظاهر می شود که باد خارج از محور باشد. این به این معنی است که اثر دو وجهی روی زاویه حمله تنها زمانی وجود دارد که لغزش کناری وجود داشته باشد.
البته از آنجایی که زاویه حمله در سمت راست بزرگتر است، یک لحظه بهبودی شروع می شود و با چرخش اولیه مقابله می کند. هواپیما پس از برخی نوسانات میرا حول محور طولی به حالت افقی باز می گردد.
پایداری جانبی برای هواپیماهای هوانوردی عمومی و تجاری از اهمیت بالایی برخوردار است. زاویه دو وجهی ساده ترین وسیله برای به دست آوردن این ثبات است، موارد دیگری نیز وجود دارد.
پایداری از بال جاروب شده، به دلیل جریان دهانه ای
بالابر با در نظر گرفتن جریان هوا به موازات وتر که شتاب می گیرد ایجاد می شود. هوایی که در جهت عمود حرکت می کند، شتاب نمی گیرد و هیچ بالابری ایجاد نمی کند، تصویر سمت چپ را ببینید:
(اصولاً، بال جارو شده مقدار بالابر ایجاد شده را کاهش می دهد، این با مزایای دیگری که به هر حال آن را مفید می کند جبران می شود).
اگر بال جاروب شده باد را از جهت مایل دریافت کند، مانند هنگام لغزش جانبی، انرژی هوای موجود به همان نسبت برای هر بال از بین نخواهد رفت (تصویر سمت راست، بالا را ببینید).
وتر بال راست در جریان هوایی که از سمت راست میآید بهتر جهتگیری میکند، و نسبت بزرگتر هوا در مقایسه با زمانی که جریان هوا به سمت جلو میآید، باعث بالا رفتن میشود. این برای جناح چپ برعکس است. این اثر همچنین به پایداری جانبی کمک می کند.
جلوگیری از مارپیچ
زاویه دو وجهی همراه با عوامل دیگر در پایداری رول نقش دارد. ناحیه ای که دو وجهی نقش مهمی را ایفا می کند، تثبیت حالت مارپیچی (یا واگرایی مارپیچی) است.
حالت مارپیچی، مانند رول هلندی و فوگوئید، یک حالت نوسانی است که می تواند با گذشت زمان (پایدار) یا دائماً افزایش یابد (ناپایدار). حالت مارپیچی ناپایدار به این صورت اتفاق می افتد:
(1) اغتشاش یک لحظه چرخشی کوچک و لغزش جانبی به سمت راست ایجاد می کند.
(2) لغزش جانبی یک جزء باد متقابل از سمت راست ایجاد می کند.
(3) تبیت کننده عمودی AoA افزایش می یابد و بالابر را به سمت چپ ایجاد می کند.
(4) لیفت یک لحظه انحراف ایجاد می کند و بینی را به سمت راست می چرخاند.
(1) ممان انحراف ممان چرخشی و لغزش کناری را به سمت راست افزایش می دهد (یک چرخه جدید آغاز شده است).
اگر این اثر شناسایی و اصلاح نشود، که به راحتی می تواند در IMC اتفاق بیفتد، زمانی که افق طبیعی قابل مشاهده نیست، هواپیما به لغزش و انحراف ادامه می دهد، در حالی که جزء عمودی بالابر به دلیل چرخش کاهش می یابد.
یک مارپیچ خطرناک به سمت پایین که می تواند منجر به آسیب های ساختاری یا برخورد زمین شود.
این چرخه نتیجه تمام نیروهای دینامیکی است که بر روی هواپیما اعمال می شود، به ویژه بالابر روی هر بال و موقعیت مرکز فشار.
استفاده از بال های دو وجهی بر نیروها و زمان نسبی آنها تأثیر می گذارد و حالت مارپیچی ناپایدار را به حالت پایدار تبدیل می کند. این امر با استفاده از یک تثبیت کننده عمودی کوچکتر و سکان تسهیل می شود که به نوبه خود می تواند یک رول هلندی ناپایدار یا یک کابین کوتاهتر ایجاد کند.I hope I have helped you in understanding the question. Roham Hesami, seventh semester
aerospace engineering


 و
و