

استپر موتور ( Stepper Motor ) یا استپ موتور ( Step Motor ) یا موتور پله ای یک موتور براشلس (Brushless ) الکتریکی DC است که یک دور کامل ( ۳۶۰ درجه ) را به تعدادی پله یا استپ مساوی تقسیم می نماید. کنترل موقعیت موتور پله ای برای رفتن به یک پله خاص یا ماندن در آن پله بدون استفاده از سیستم فیدبک می باشد و این نشانه دقت بالای این موتور ها است
. در موتور های DC معمولی ما برای کنترل چرخش شفت نیاز به کنترل لحظه به لحظه و سیستم بازخورد داریم. استپ موتورها معمولا دارای سرعت نسبتا پایینی در حدود 200 الی 300 دور در دقیقه هستند. اما موتورهایی با سرعت 1000 دور در دقیقه هم وجود دارند.
این موتور ها در هر پله یا استپ به میزان خاصی بر حسب درجه دوران می کنند ، به عنوان مثال محور استپ موتور ۲۰۰ استپ در هر استپ ۱/۸ درجه دوران می کنند
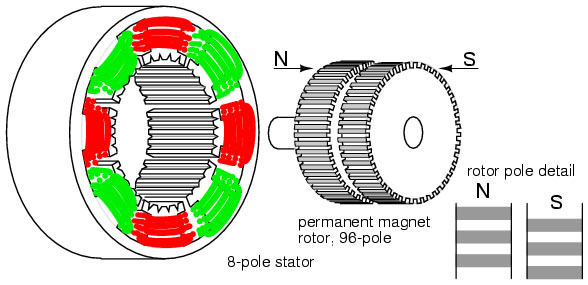
موتورهای پلهای معمولاً دارای 50 تا 100 قطب مغناطیس الکترومغناطیس (جفت قطب شمال و جنوب) هستند که توسط یک آهنربای دائمی یا یک جریان الکتریکی تولید میشوند.موتور پلهای یک موتور بدون جاروبک و سنکرون است که حرکت آن به صورت پلهای و گسسته است. در حالت کلی، موتور پلهای در هر پله یا گام به اندازه ۱٫۸ درجه میچرخد و در نتیجه، ۲۰۰ پله را برای چرخش یک دور کامل میپیماید. این نوع موتورها در زاویههای پله ۳۰، ۱۵، ۵، ۲٫۵ و ۲ درجهای نیز موجود هستند. موتورهای پلهای بر اساس اصول الکترومغناطیس کار میکنند و میتوان آنها را بدون فیدبک کنترل کرد. از آنجایی که موقعیت و سرعت این موتورها با کمک سیستمهای کنترل پیشرفته رایانهای به دقت قابل کنترل است، در بسیاری از کاربردهای مرتبط با کنترل دقیق موقعیت، مانند رباتیک، مورد استفاده قرار میگیرند.مانند سایر موتورهای الکتریکی، موتور پلهای یک بخش متحرک به نام روتور (Rotor) و یک بخش ثابت به نام استاتور (Stator) دارد. استاتور و روتور قطبهای مغناطیسی دارند و با انرژیدار کردن قطبهای استاتور، روتور برای تراز شدن با استاتور حرکت میکند. روتور یک قطعه آهن دندانهدار به شکل چرخدهنده است. استاتور نیز از مجموعه آهنرباهای الکتریکی تشکیل شده که در حول محور دندانهدار مرکزی قرار گرفتهاند.وقتی جریان از سیمپیچیهای فاز موتور پلهای عبور کند، شار مغناطیسی در استاتور و عمود بر جهت گذر جریان به وجود میآید. آهنرباها به طور همزمان انرژیدار میشوند. هنگامی که یک آهنربا با کمک یک مدار درایور خارجی یا میکروکنترلر انرژی میگیرد، شفت یا محور روتور طوری میچرخد که نسبت به استاتور در موقعیتی قرار گیرد که کمترین مقاومت را در برابر شار داشته باشد. این بدین معنی است که الکترومگنت (آهنربای الکتریکی) آن دندانههایی از چرخدنده را جذب میکند که نسبت به بقیه آهنرباها انحراف دارند. به همین دلیل، هنگامی که آهنربای بعدی روشن یا برقدار است، آهنربای قبلی خاموش میشود که منجر به جذب دندانههای چرخدهنده توسط آهنربای دوم خواهد شد. بنابراین، چرخش روتور به صورت پلهای خواهد بود و تعداد پلهها عدد صحیحی است که با توجه به زاویه حرکت در هر مرحله تعیین میشود
با کنترل زاویه هر پله، میتوانیم دقت و نرمی چرخش روتورِ موتور را کنترل کنیم. در موتور پلهای، سه مُد یا حالت تحریک وجود دارد که تحریک موتور پلهای
عملکرد پله کامل
در این حالت، روتور در یک مرحله به اندازه زاویه پایه 1٫8 درجه حرکت میکند و بدین ترتیب 200 پله برای اتمام چرخش آن لازم است. میتوانیم این حالت را با انرژیدار کردن فقط یک فاز از سیمپیچهای استاتور یا دو فاز عملی کنیم. عملکرد با یک فاز حداقل توان را از مدار درایور مصرف خواهد کرد. از سوی دیگر، وقتی دو فاز را در یک لحظه انرژیدار میکنیم، گشتاور و سرعت زیاد میشود.
مد تحریک موتور پلهای
عملکرد نصف پله
در این حالت، روتور به اندازه نصف زاویه پایه یک پله کامل میچرخد و در نتیجه گشتاور نسبت به عملکرد پله کامل بهبود مییابد. همچنین، نرمی و دقت حرکت دو برابر میشود.
عملکرد نصف گام
در عملکرد پله کوچک، زاویه پایه به مقادیر کوچکتر، حتی ۲۵۶ قسمت، تقسیم میشود. وقتی که افزایش نرمی حرکت مورد نظر باشد، عملکرد گام کوچک یا ریز مورد توجه قرار میگیرد.
انواع موتورهای پلهای
سه نوع موتور پلهای وجود داره که در زیر میارم براتون.
موتور پلهای مغناطیس دائم
زاویه پله معمولی یک موتور پلهای با آهنربای مغناطیس دائم 7٫5 تا 15 درجه است. شفت آهنی روتور با تغییر قطب شمال و جنوب در یک خط مستقیم موازی آهنی مغناطیسی میشود که نتیجه آن افزایش شدت شار مغناطیسی است و به همین دلیل گشتاور این نوع موتورها به طور قابل توجهی افزایش مییابد. موتورهای پلهای آهنربای دائم به دلیل مقادیر بالاتر زاویههای پله، رزولوشن یا دقت و نرمی پایینتری دارند. البته این موتورها، موتورهای کمهزینهای هست
هر قطب آهنربای دائمی یک نقطه توقف طبیعی برای شفت موتور ارائه می دهد.
تعداد بیشتر قطب ها به یک موتور پله ای اجازه می دهد تا خود را به طور دقیق و دقیق بین هر یک از قطب ها قرار دهد.
این یکی از ویژگیهای راحت موتور پلهای است، زیرا قطبهای درون یک موتور پلهای اجازه میدهد تا بدون هیچ گونه بازخورد موقعیتی، بهطور دقیق قرار گیرد
به عبارت دیگر در یک سیستم کنترل حلقه باز کار می کند. کنترل حلقه باز اجازه می دهد تا یک پالس الکتریکی از یک کنترل کننده، شفت موتور را از یک قطب به قطب دیگر حرکت دهد و بدون بازخورد موقعیتی به کنترل کننده، در تراز با قطب الکترومغناطیسی متوقف شود.
این یکی از مزایای موتور پله ای است، اما مزایای اضافی استپر موتور در مقاله ای جداگانه مورد بحث قرار خواهد گرفت.
هنگامی که می خواهیم وضوح را افزایش دهیم یا به کوچکترین حرکت چرخشی دست یابیم، طراحی پله حاوی تعداد بیشتری از قطب های مغناطیسی خواهد بود.
اساساً، اندازه پله افزایشی یک موتور پلهای بر اساس تعداد قطبهای آهنربای الکترومغناطیس به درجه خاصی از چرخش ثابت میشود. بنابراین، حرکت به یک موقعیت دقیق صرفاً ارسال تعداد صحیح دستورات پالس است.
موتورهای پله ای ممکن است تا 200 دندانه روتور یا 200-400 پله کامل در هر چرخش شفت موتور داشته باشند.
برای تعیین وضوح چرخش می توانیم کمی ریاضی انجام دهیم. اگر یک موتور پله ای 200 پله افزایشی داشته باشد و بدانیم که چرخش کامل برابر با یک دایره یا 360 درجه است، می توانیم 360 درجه را بر 200 تقسیم کنیم. این معادل 1.8 درجه چرخش زاویه کامل است.
400 پله تقسیم شده به 360 درجه، 0.9 درجه چرخش زاویه کامل گام را فراهم می کند.
خروجی یک پالس دیجیتال از درایور کنترلر معادل یک مرحله چرخش است.
با این افزایش در تعداد قطب های آهنربای الکترومغناطیسی، عملیات اساساً مانند مثال ارائه شده با استفاده از چرخش 90 درجه است، اما اکنون چرخش بیشتر شبیه به 1.8 درجه چرخش است که قبلاً ذکر شد.
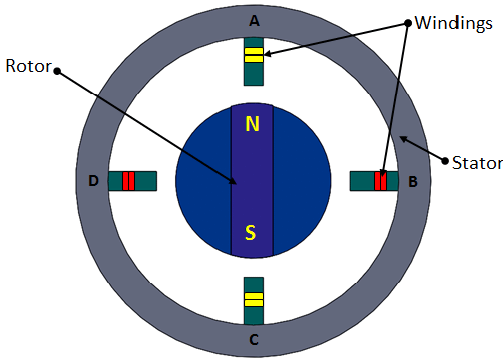
در موقعیت 1، روتور در موقعیت بالایی با الکترومغناطیسی استاتور بالایی فعال شده است که نشان دهنده S برای قطبش جنوبی است و در موقعیت 2 استاتور الکترومغناطیس بالایی بدون انرژی است و استاتور مغناطیس الکترومغناطیسی به سمت راست فعال است، روتور در جهت عقربه های ساعت حرکت می کند و با آن هم تراز می شود. این الکترومغناطیس قطبش S جدید را نشان می دهد که امکان حرکت چرخشی دقیق درجه را فراهم می کند.
این تغییر قطبش الکترومغناطیسی به ایجاد چرخش 360 درجه ادامه می دهد. هرچه سرعت eپلاریزاسیون الکترومغناطیسی هر چه سرعت بیشتر باشد اتفاق می افتد.
پیش درآمدی بر استپر موتور
موتورهای DC معمولی تنها با یک کلید خاموش و روشن فعالیت می کنند و با وارد کردن ولتاژ شاهد چرخش موتور هستیم، برای برعکس کردن جهت چرخش هم کافیست نحوه اتصال قطب ها را عوض کنیم، اما استپ موتور ها امکان کنترل دقیقتر را به ما می دهند، اما چگونه ؟
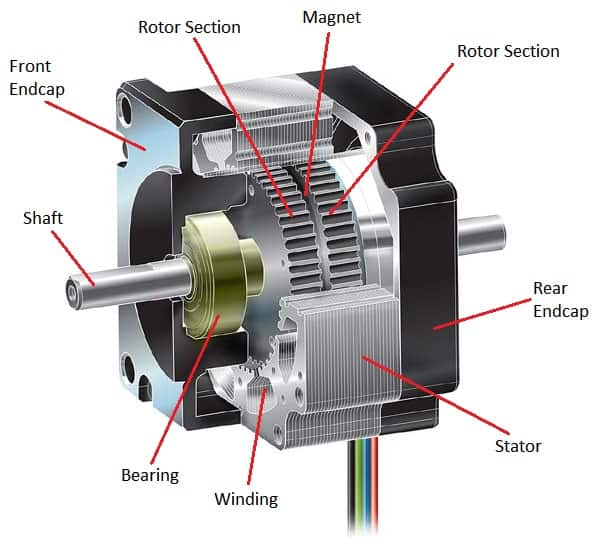
ساختار استپ موتور
استپ موتورها دارای 2 بخش اصلی هستند.
روتور
استاتور
روتور : روتور همان سیلندر مرکزی استپ موتور است که روی آن تعدادی استپ قرار گرفته است، در موتور های جریان مستقیم ( موتورهای DC ) معمولی سیم پیچ ها روی روتور قرار دارند و آهنربای دائم روی استاتور تعبیه شده اما در استپ موتور ها، سیم پیچ ها روی استاتور تعبیه شده اند. در واقع در موتور های DC معمولی سیم پیچ ها همراه روتور در چرخش هستند اما در استپ موتورها اینچنین نیست.
استاتور : استاتور قسمت ثابت استپ موتورها هستند که روتور درون آن چرخش می کند، استاتور در این موتور ها دارای سیم پیچ هایی است که به آنها فاز می گوییم، وارد شدن پالس های الکتریکی به این فازها باعث چرخش روتور می شود.
دیاگرام استپر موتور
گام استپر موتور
منظور از گام، کوچک ترین چرخش قابل کنترل در استپر موتور است. استپ موتورها بسته به نوع کاربرد با دقت های مختلفی ساخته می شوند. زاویه گام همان زاویه ای است که به ازای هر گام طی می شود.
رابطه بین دور موتور و استپ ها : برای محاسبه تعداد استپ هایی که در یک ثانیه توسط موتور طی می شود باید تعداد دور بر دقیقه را در تعداد استپ های یک دور کامل ضرب کنیم و عدد حاصل را تقسیم بر 60 کنیم.
مثال : برای یک استپر موتور با دور 300 RPM یا 300 دور در دقیقه با تعداد استپ 200، تعداد استپ هایی که در یک ثانیه طی می شود به شکل زیر است :
1000=60/(200*300)
به این شکل می توان به دقت واقعی استپ موتور پی برد، در حالیکه 1000 استپ در ثانیه رد می شود اما ثانیه بعد می توان در یک استپ مشخص، حرکت موتور را به حالت سکون تبدیل کنیم.
عملکرد استپ موتور
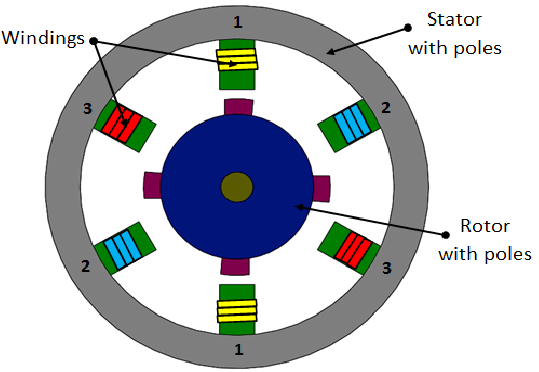
درون استاتورِ استپر موتور تعدادی آهنربای الکتریکی وجود دارد که دارای استپ ( پله/دندانه ) هستند، این آهنرباها توسط سیستم کنترل با ارسال پالس هایی فعال و غیر فعال می شوند. در مرکز موتور روتور وجود دارد. روتور سیلندری آهنی دارای خاصیت مغناطیسی است که روی آن استپ هایی وجود دارد. با ارسال اولین پالس و فعال شدن اولین آهنربای الکتریکی، روتور شروع به چرخش می کند تا استپ های رتور دقیقا روبروی آهنربای الکتریکی فعال قرار بگیرند. در این حالت استپِ روتور با بقیه استپ های استاتور دارای انحرافی کم است. همراه با فعال شدن آهنربای الکتریکی بعدی و غیر فعال شدن آهنربای اول، استپ های روتور با استپ های آهنربای بعدی در یک راستا قرار می گیرند. با ادامه این روند روتور چرخش می کند و ما می توانیم شفت استپر موتور را در زاویه دلخواه قرار بدهیم.
برای مثال یک استپ موتور با درجه 1.8 باید 200 گام را طی کند تا یک دور کامل چرخش داشته باشد.
( 360 = 200 * 1.8 )
عملکرد استپر
و به این ترتیب می توان گفت هر چه تعداد استپ ها بیشتر باشد دقت عملکرد بیشتر می شود. استپ موتورها دارای سیستم کنترل حلقه باز هستند، به این معنی که نیاز به سیستم بازخورد ندارند. نحوه کار سیستم حلقه باز به این شکل است :
سیستم حلقه باز
انواع استپ موتور
مغناطیس دائم : دارای روتوری با آهنربای دائمی هستند و برای تجهیزاتی با سرعت پایین، گشتاور بالا و همچنین زاویه پله بالا مانند 45 یا 90 درجه استفاده می شود.
با مغناطیس متغیر : ساده ترین نوع استپ موتور، که روتور آن دارای خاصیت مغناطیس شونده است. با وارد کردن ولتاژ DC به سیم پیچ های استاتور، استپ های روتور به سمت قطب مغناطیسی ایجاد شده حرکت کرده و باعث چرخش موتور می شوند.
استپر موتور هیبرید : این استپ موتورها ترکیبی از 2 مدل استپ موتورهای بالا هستند، مرکز روتور قطب S و استپ های روتور قطب N است. استپر موتور های هیبریدی دارای 3 درجه استاندارد 0.9 و 1.8 و 3.6 درجه هستند.
استپر موتور هیبرید
استپ موتور ترمزدار : استپر موتور گاهی برای حمل و جابه جایی وزنه یا بار در محور عمودی استفاده می شوند، هنگامی که جریان برق به استپر موتور متصل نیست، ما ممکن است برای نگه داشتن استپ موتور در مکانی ثابت به ترمز نیاز داشته باشیم. برای این مورد استپر موتور ترمزدار پیشنهاد می شود. استپ موتور ترمزدار این قابلیت را ایجاد میکند که هنگامی که جریان برق به استپ موتور متصل نیست هیچ حرکتی انجام نشود و به اصطلاح استپ موتور در حالت قفل باشد.
استپ موتور گیربکس دار : در مواقعی که کاربرد ما به شکلی باشد که نیاز به کنترل دور موتور و گشتاور داشته باشیم از گیربکس برای استپ موتور استفاده میکنیم. عموما برای رسیدن به گشتاور بالا در سرعت های پایین از استپر موتور های گیربکس دار استفاده می شود.
استپر موتور انکودر دار : همانطور که با هم بررسی کردیم، عموما استپ موتورها در سیستم های حلقه باز کنترل می شوند. نحوه کار سیستم حلقه باز به این شکل است که داده ها وارد می شوند، فرآیند انجام می شود و داده ها خارج می شوند و به این شکل ما هیچگونه کنترلی بر موقعیت مکانی نخواهیم داشت. اما در مواقعی ممکن است نیاز به سیستم کنترل حلقه بسته در سرعت های پایین داشته باشیم. این کار با استفاده از استپر موتور معمولی قابل اجرا نیست و همینطور استفاده از سروو موتور به دلیل قیمت بالای آن باعث افزایش هزینه خواهد شد. در این مواقع استفاده از استپ موتور انکودر دار بسیار مقرون به صرفه خواهد بود.
استپر موتور ضد آب : انواعی از استپ موتور وجود دارند که دارای استاندارد ضد آب IP65 هستند. این استاندارد به استپر موتور این قابلیت را می دهد که در مقابل پاشش آب از هر زاویه ای مقاومت داشته باشد. به یاد داشته باشید این استاندارد به این معنا نیست که بتوان استپ موتور را زیر آب استفاده کرد، بلکه در مواقعی که ممکن است استپ موتور در معرض پاشش آب قرار گیرد از استپ موتور ضد آب استفاده می شود.
استپر موتور
انواع استپ موتور بر اساس شفت :
استپ موتور ها دارای شفت های مختلفی هستند که با توجه به نوع کاربرد باید استپر موتور با شفت مناسب را انتخاب کنیم. شفت در استپ موتور ها به 3 شکل زیر وجود دارند.
شفت دی شکل یا راند (D or Round ) : شفت های راند در سایز های مختلف موجود هستند. این شفت ها دارای یک سمت صاف و یک سمت بشکل D هستند و برای جلوگیری از لیز خوردن استفاده می شوند، در مواقعی که گشتاور بالا نیاز باشد از این شفت ها بخوبی میتوان استفاده کرد.
شفت دارای دنده : این شفت ها درای دندانه هایی هستند که برای وارد آوردن فشار بیشتر هنگام چرخش استفاده می شوند.
شفت لید اسکرو : شفت های لید اسکرو برای عملکرد های خطی بکار می روند، در تجهیزاتی که نیاز است هدی که اطلاعات را میخواند جابجا شود از این شفت استفاده می شود. برای مثال در دستگاهی مثل هارد درایو برای جابجایی هدی که روی دیسک مغناطیسی وجود دارد از شفت لید اسکرو مینیاتوری استفاده می شود.
شفت استپ موتور
انواع سیم پیچی استپر موتور
تک قطبی : مورد استفاده ترین استپر موتور تک قطبی دارای 4 سیم پیچِ استاتور است. این 4 سیم پیچ بصورت 2 به 2 با هم زوج هستن و دارای یک سر وسط مشترک هستند. در این نوع از استپر موتورها، از سیم پیچ ها در یک جهت جریان عبور داده می شود و به همین دلیل به نام استپر موتور 4 فاز یا تک قطبی شناخته می شوند. استپر موتور تک قطبی دارای 5 یا 6 سیم است و عموما با درجه حرکت 3.6 یا 7.5 ساخته می شوند.
دو قطبی : در استپر موتور 2 قطبی، هر سیم پیچ می تواند از 2 طرف برق دار شود. هر سیم پیچ در استپ موتور 2 قطبی به یک منبع تغذیه معکوس شونده نیاز دارد. استپر موتورهای 2 قطبی از انواع تک قطبی قدرت بیشتری دارند و به همین دلیل در طراحی هایی که فضا محدودتر است استفاده می شوند.
تک قطبی و دو قطبی
فاز در استپ موتور
منظور از قطب در استپر موتور همان قطب های آهنربا هستند. در استپر موتورها ممکن است تعداد مختلفی سیم پیچ وجود داشته باشد. اما این سیم پیچ ها بشکل گروه هایی به نام فاز با هم در ارتباط هستند. تمامی سیم پیچ های یک فاز با یکدیگر شروع بکار میکنند. استپ موتور ها عموما دارای 2 فاز هستند، اما استپر موتورهای 3 فاز و 5 فاز هم موجود هستند. بعضی اوقات استپ موتور تک قطبی به اسم استپ موتور 4 فاز شناخته می شود، در حالیکه در واقع 2 فاز دارد.
زاویه گام = 360 ÷ ( تعداد قطب ها به ازای هر فاز * تعداد فازها ) = 360 ÷ تعداد کل فازها
سیم بندی در استپر موتور
یک استپ موتور 2 قطبیِ 2 فاز دارای 2 گروه سیم پیچ است، استپ موتور 2 قطبیِ 2 فاز دارای 4 سیم است که هر گروه از سیم پیچی ها دارای 2 سیم است. یک موتور 4 فاز تک قطبی دارای 4 سیم پیچ است. بعضی از استپ موتورها دارای سیم بندی انعطاف پذیر هستند که این اجازه را به ما می دهد که استپ موتور را به هم بصورت تک قطبی و هم 2 قطبی راه اندازی کنیم.
استپر موتورها با توجه به تک قطبی یا 2 قطبی بودنشان و کاربردی که از آنها انتظار داریم سیم بندی های متفاوتی دارند.
5 سیم : این استایل سیم بندی در استپر موتور های تک قطبی کوچک رایج است. سیم های مشترک به هم میپیوندند و یک سیم پنجم مشترک تشکیل می شود. اینگونه استپ موتور را فقط بصورت تک قطبی می توان راه اندازی کرد.
6 سیم : در اینگونه استپ موتور ها هر فاز دارای 3 سیم است، میتوان 2 سیم وسط را به یکدیگر اتصال داد و از آن به عنوان استپر موتور تک قطبی استفاده کرد یا اتصال نداد و از آن بعنوان استپ موتور 2 قطبی استفاده کرد.
8 سیم : همه کاره ترین استپ موتور ها، 8 سیمه هستند، این استپر موتورها را می توان به شکل های مختلف راه اندازی کرد.
4 فاز تک قطبی : مانند استپ موتور 5 سیمه تمام سیم های مشترک را می توان یکی کرد.
2 فازِ 2 قطبیِ سری : فازها به شکل سری متصل هستند، مانند استپ موتور 6 سیمه.
2 فازِ 2 قطبیِ موازی : فاز ها بشکل موازی به هم متصل هستند. نتیجه مقاومت کمتر در مدار است اما نیازمند ورود 2 برابر جریان بیشتر است. نتیجه ی این سیم بندی، گشتاور و سرعت نهایی بالاتر است.
درایور استپر موتور چیست ؟
درایور استپ موتور در حقیقت راه انداز آن است، همانطور که ذکر شد استپر موتور پالس هایی به شکل on و off دریافت میکند و این پالسها هستند که شکل حرکت و عملکرد استپ موتور را کنترل می کنند. در عملکرد استپر موتور 2 ماژول دیگر به نام کنترلر و درایور وجود دارند، وظیفه درایور دریافت اطلاعات از کنترلر و تبدیل آن ها به پالس هایی برای حرکت دقیق استپ موتور است.
درایور استپ موتور
راه اندازی استپر موتور و مفهوم میکرو استپینگ
از آنجا که استپر موتورها برای دستیابی به حرکت های دقیق و با شرایط کاملا کنترل شده، طراحی و ساخته شده اند، به همین منظور و برای ارسال مجموعه ای از دستورها و فرمان های حرکتی نیاز به سیستم کنترلی دارند. این مجموعه کنترلی شامل دو بخش اصلی کنترلر (پردازشگر،CPU) و درایور است. کنترلر های صنعتی انواع و اقسام متفاوتی دارند که از میان آنها می توان به PLC ها، بردهای Mach3 ، آردوئینو، رزبری پای و ... اشاره کرد. این کنترلر ها بر اساس پارامترها و ساختارهای ذاتی خود، سیگنال های حرکتی اعم از سرعت، زاویه، شتاب، جهت و ... را بر اساس کدهای مرجع به درایور موتور منتقل نموده و درایور استپ موتور نیز با تقویت این سیگنال ها و ارسال فرمان های حرکتی بر مبنای ولتاژ و جریان، استپ موتور را با شرایط حرکتی خواسته شده به حرکت در می آورند. برنامه ریزی حرکتی استپر موتور ها از طریق نرم افزارهای مربوط به کنترلرها اتفاق می افتد و درایور توانایی خاصی در این زمینه ندارد و تنها تقویت کننده سیگنال و ارسال ولتاژ و جریان مورد نیاز برای هر نوع حرکتی به سمت موتور بر عهده این قطعه است. همانطور که کنترلر ها انواع مختلفی دارند، درایور استپر موتور نیز دارای انواع مختلفی مانند رو بردی، درایورهای صنعتی و دارای قابلیت میکرو استپینگ ( micro stepping ) است. مصرف کنندگان این قطعات با توجه به طراحی ها و نیازهای خود، مدل های مختلفی از موتور، درایور و کنترلر را انتخاب کرده و سیستم خود را راه اندازی می نمایند. همانطور که می دانید استپر موتورها دارای یک زاویه گام ذاتی هستند. به عنوان مثال 1.8 درجه. در صورتیکه دقت حرکتی بیشتر از این مقدار نیاز باشد، می بایست از قابلیت micro stepping درایور که به صورت دیپ سوئیچ هایی روی درایور است (نحوه ی تنظیمات داخل دیتاشیت های هر درایور وجود دارد) استفاده نمود و با استفاده از کنترلر، فرمان های حرکتی را به آن منتقل کرد. برخی از درایور های استپر موتور توانایی تقسیم هر گام موتور به 1024 قسمت را دارند. اما کنترل این موضوع نیز کار ساده ای نبوده و ممکن است دقت حرکتی را با خطای زیاد روبرو کند و یا اینکه به موتور آسیب وارد نماید. به همین منظور می بایست هر سه بخش این سیستم یعنی موتور، درایور و کنترلر توانایی و آمادگی این رفتار را داشته باشند.
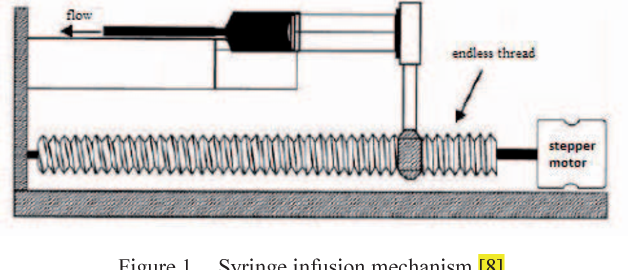
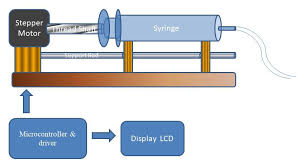
فشار خروجی پمپ سرنگ را محاسبه کنیدپمپ تزریق سرم (پمپ پریستالتیک یا پمپ ولومتریک-پمپ اینفیوژن )
من این پمپ سرنگ را طبق این دستورالعمل ها ساخته ام. اکنون من نیاز دارم که چگونه فشار خروجی را با توجه به سرعت استپ موتور و برعکس محاسبه کنم.
به هر حال نمیدانم مفید است یا نه، اما میدانم که رابطه بین گشتاور اعمال شده توسط موتور و نیروی خطی روی پیستون سرنگ به صورت زیر است:
$M = F r_a \tan(\alpha), \; \tan(\alpha) = \frac{p}{2 \pi r_a}$
که در آن $r_a$ شعاع میله رزوه ای، $\alpha$زاویه رزوه و p گام است.
بدین ترتیب داریم:
$M = \frac{F p}{2 \pi} = \frac{P r^2 p}{2}$
جایی که r شعاع سرنگ است. تا الان درسته؟ علاوه بر این، آیا مفید است؟ من خودم را ناخواسته در این پروژه گرفتار کردم اما هرگز چنین مواردی را مطالعه نکردم.
مشکل اینجاست که گشتاور اعمالشده به بار بستگی دارد، بنابراین نمیدانم چگونه فشار مایع خروجی را با سرعت استپ موتور مرتبط کنم.
مسیتونم از Unipolar stepper motor, six wire. It has a resolution of 200 steps per revolution (1.8 degrees). It is powered by 12 V and draws 310 mA current per coil. The torque is 1.6 kg*cm (0.15 Nm). Dimensions are 42 x 42 x 34 mm
استپ موتور ZK-3518HB1 دو فاز با گام ۱٫۸ درجه
چرا از سرعت تغییر حجم استفاده نمی کنیم و از بقای جرم استفاده نمی کنیم؟ –
این بستگی به حد جریان موتور، شتاب تمام گام، حداکثر شتاب و سرعت بالاتر و نرخ جریان مطلوب دارد. –
سوال این است که چگونه می توان فشار خروجی را از نرخ پله استخراج کرد.
پاسخ تمام محاسبات را انجام نمی دهد بلکه سعی می کند متغیرها را تعریف کند.
حداقل مشخصات مورد نیاز:
s = گام افزایشی [m] (پس از کاهش دنده)
$(°/step * mm/rev(wormgear) * 360°/1000[mm/m])$
F = حداقل نیروی پله [کیلوگرم] (که باید از بار بیشتر باشد تا از پرش در سرعت جلوگیری شود)
گشتاور * شعاع دنده، r [m] = F [kg] (تبدیل شده از N-m)
حداقل نیروی پله ای F باید از نیروی بار ورودی سرنگ تجاوز کند
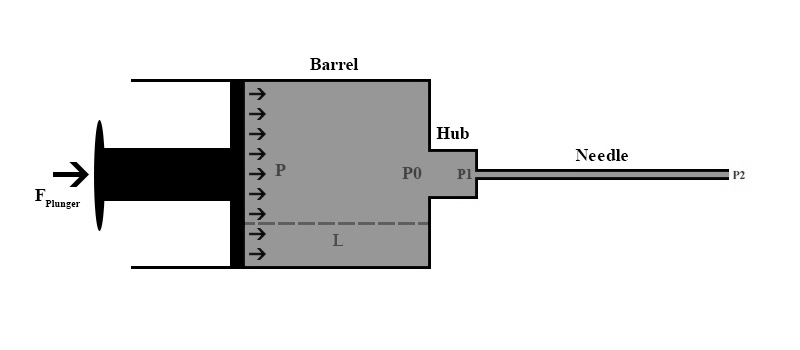
F=Pi/Area برای جلوگیری از پرش
پی = فشار ورودی
Po = فشار خروجی
L = طول لوله
η = ویسکوزیته
R = شعاع
V = حجم سیال در فشار خروجی
v = سرعت سیال در فشار خروجی
برای هر مرحله متحدالمرکز تکرار کنید
$Flowrate = \dfrac{π\cdot r^4 \cdot (P-Po) }{ 8\cdot η\cdot L} [m^3/s]$
اگر خروجی زیر در هوا باشد، آیا می توانیم P1=P2 را فرض کنیم؟ نه
شاید بهتر باشد سرعت جریان را با ورودی نیرو برای سرنگ هدف اندازه گیری کنید، سپس دبی مورد نظر را تعریف کنید، سپس نسبت دنده و گشتاور موتور و سرعت گام مورد نیاز برای انجام کار را تعیین کنید.
با این حال، در نظر گرفتن بهینهسازی سرعت استپر، یک شتاب کنترلشده برای جلوگیری از پرش است.
اگر نرم افزار منبع باز GRBL Panel (S/W) را با این متغیرها در یک محافظ آردوینو CNC دارید، می توانید سرعت را به حداکثر برسانید و سپس نسبت آن را برای سرعت جریان کنترل کنید، با این S/W بهتر از هر چیز دیگری که من دارم. مواجه شدن.
، اما وقتی فشار پیستون، سپس نیروی مورد نیاز و در نهایت گشتاور را محاسبه کردم، چگونه آن را با سرعت گام مرتبط کنم؟ دیتاشیت ها فقط حداکثر گشتاور را ارائه می دهند و برخی از پله ها (نه این یکی) نیز با حداکثر گشتاور به عنوان تابعی از نرخ گام ارائه می شوند. این میزان گام را نشان نمی دهد که آن فشار در پیستون وجود دارد -
، اندازه های مختلف سوزن را دریافت کنم، نرخ جریان را اندازه گیری کنم. فرمول ها چسبندگی اولیه یا نیروی استاتیک پله ای را پوشش نمی دهند. سرعت جریان به نیروی بیشتری در برخی از سرعتها که نیروهای پلهای کاهش مییابند، نیاز دارد. شتاب سرعت گام کاهشی، سرعت پله را به میزان قابل توجهی افزایش می دهد، بنابراین، نیروی دینامیکی در سرعت تعیین شده توسط نرخ گام ممکن است با طراحی بهینه شود. بنابراین من هیچ ایده ای ندارم که شما می توانید به آن دست پیدا کنید، اما می تواند با آنچه من می توانستم به دست بیاورم متفاوت باشد. حداقل فرمول ها به شما کمک می کند تا مبادلات را درک کنید.
به عبارت دیگر محدوده جریان های مورد نیاز، سرعت جریان، سطح نازل، سطح بشکه، سطح پله* خطی = حجم پله را تعریف کنید، سپس نرخ گام را به سمت پایین شیب دار کنید و برای یک حجم کنترل شده متوقف شوید. سرعت سیال مقداری محدودیت خواهد داشت،
 hope I helped you understand the question. Roham Hesami, sixth
hope I helped you understand the question. Roham Hesami, sixthsemester of aerospace engineering

