

$mg - T = ma$ انتقالی
$TR = \frac{a}{2R}(R^2 + r^2)$ (چرخشی)
اگر بخواهم رو به بالا مثبت باشد و از ابتدا نخواهم جهت ها را تعیین کنم و اجازه بدهم تعویض های ما مراقب جهت باشند (یعنی هیچ علامت منفی قبل از تعویض نمی خواهم)، معادله انتقالی با
$T + mg = ma$
که در آن به جای g=9.8، g=-9.8 را مثبت می گیریم. سوال من این است که چگونه معادله چرخشی حرکت تغییر خواهد کرد.
اگر من بخواهم رو به بالا مثبت باشد و از همان ابتدا جهت ها را اختصاص ندهم و اجازه بدهم تعویض های ما مراقب جهت باشند (یعنی قبل از تعویض هیچ علامت منفی نمی خواهم)، معادله انتقالی$T + mg = ma$داده می شود. ma که به جای g=9.8، g=-9.8 را مثبت می گیریم.
اگر شما (جهت y یا$\hat j$) را مثبت فرض کنید، ممکن است معادله شما برای حرکت انتقالی باشد.
$T \hat j - Mg \hat j = M a_{\rm y} \hat j \Rightarrow T - Mg = M a_{\rm y}$
بدون انتخاب/حدس زدن جهت شتاب.
نوشتن کاری که انجام دادی
$T+Mg=Ma$ از$-T\hat j - Mg \hat j = -Ma_{\rm y} \hat j$ می آید.
$T_{\rm y} \hat j - Mg \hat j = Ma_{\rm y} \hat j$ چه اشکالی دارد که$T_{\rm y}$ جزء کشش در جهت y است و هیچ قضاوتی در مورد جهت شتاب گرفته نمی شود؟
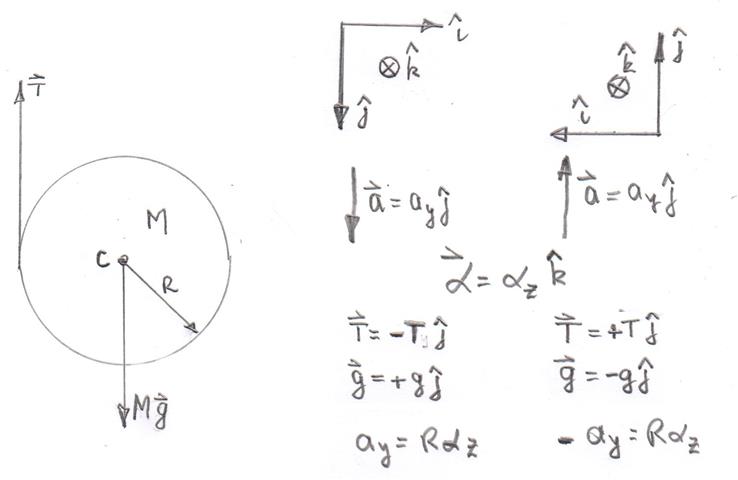
با توجه به محدودیتهایی که برای چیدمان دارید، با نادیده گرفتن سوراخ در وسط با ممان اینرسی رول توالت در مورد مرکز جرم C آن $I_{\rm C}$ و بقیه نمادهای تعریف شده در نمودار و زیر، چیزی شبیه به این خواهد بود. .
برای مقایسه این دو وضعیت تنها کاری که انجام دادم چرخاندن محورهای بردار واحد حول بردار $\hat k$ توسط $\pi$ است.
T و g بزرگی کشش و قدرت میدان گرانشی و ay و αz مؤلفههای شتاب خطی و شتاب زاویهای در جهتهای نشاندار هستند.
با توجه به اینکه چرخش رول توالت در جهت عقربههای ساعت منجر به حرکت رول توالت به سمت پایین میشود، $a_{\rm y} = R \,\alpha_{\rm z}$ و$-a_{\rm y} = R \,\alpha_{\rm z}$ شرایط محدودیت اعمال شده بر روی سیستم مربوط به دو مجموعه مختلف از محورهای بردار واحد هستند.
برای مجموعه محورهای بردار واحد سمت چپ، از$\vec F=m\,\vec a$ برای حرکت انتقالی استفاده می کنید
$Mg\hat j - T \hat j = M a_{\rm y} \hat j \Rightarrow Mg - T = M a_{\rm y}$
و برای حرکت چرخشی حول مرکز جرم C با اعمال$\vec \tau = I_{\rm C}\, \vec \alpha$بدست می آورید
$(-R\hat i) \times (-T\hat j) = R\,T\, \hat k = I_{\rm C}\, \alpha_{\rm z} \,\hat k \Rightarrow R\,T = I_{\rm C} \,\alpha_{\rm z}$
ترکیب این معادلات با شرط محدودیت به دست می آید
$a_{\rm y} = g\left( 1+ \dfrac {I_{\rm C}}{MR^2} \right )^{-1}$
اگر با استفاده از مجموعه دست راست محورهای بردار واحد کار کنید، باید دریافت کنید
$a_{\rm y} = - g\left( 1+ \dfrac {I_{\rm C}}{MR^2} \right )^{-1}$
تفاوت یک علامت منفی است.hope I helped you understand the question. Roham Hesami, sixth
semester of aerospace engineering

