
من سعی کرده ام مدار یک دنباله دار با جرم دلخواه به دور خورشیدمان را از داشتن شرایط اولیه شناخته شده با r0,v0 با زاویه $\alpha$ در t0 به دور خورشیدمان مدل کنم.
من توانستم شعاع را در فرم استخراج کنم
${c}\over{\epsilon \cos(\phi + \delta)+1}$
با c و ϵ مربوط به معانی آنها در مقاطع مخروطی (شعاع مؤثر و خروج از مرکز).
مشکل من تقریباً تمام شده است، فقط می خواستم بدانم آیا رابطه هندسی بین δ و $\alpha$ وجود دارد که بتوانم از آن استفاده کنم؟ یک راه انرژی برای حل این مسئله وجود دارد، اما یک روش هندسی برای یافتن خط مماس به عنوان تابعی از زاویه از کانون ها چیزی است که باید قابل حل باشد.
مکمل $\alpha$ به عنوان زاویه عنوان (ψ) شناخته می شود. مکمل -δ به عنوان ناهنجاری واقعی$\nu$شناخته می شود.
$\psi = \frac{\pi}{2} - \alpha$
$\nu = \pi + \delta$
زاویه سمت به عنوان تابعی از ناهنجاری واقعی و خروج از مرکز داده می شود
$\psi = \arctan\left( \frac{ e \sin(\nu) }{ 1 + e \cos(\nu)} \right)$
هوافضا
-
rohamavation

نام: roham hesami radرهام حسامی راد
محل اقامت: 100 مایلی شمال لندن جاده آیلستون، لستر، لسترشر. LE2
عضویت : سهشنبه ۱۳۹۹/۸/۲۰ - ۰۸:۳۴
پست: 3278-
سپاس: 5494
- جنسیت:
تماس:
-
rohamavation
نام: roham hesami radرهام حسامی راد
محل اقامت: 100 مایلی شمال لندن جاده آیلستون، لستر، لسترشر. LE2
عضویت : سهشنبه ۱۳۹۹/۸/۲۰ - ۰۸:۳۴
پست: 3278-
سپاس: 5494
- جنسیت:
تماس:
Re: هوافضا
تفاوت بین "پیش راکت تقویت شده با هوا" و "پیشران موشک رم جت یکپارچه" چیست؟
هنگام بررسی مبحثی به نام "ترکیب موتورهای جت مجرای و موتورهای موشکی" در فصل 1 عناصر پیشرانه موشک ساتون و بیبلارز، ویرایش نهم، بخش زیر را پیدا کردم.
خط 2 می گوید که پیشرانه موشک تقویت شده با هوا اصول را ترکیب می کند در حالی که خط 1 از پاراگراف 2 می گوید که پیشرانه موشک-رمجت یکپارچه اقدامات موشک و رام جت را ترکیب می کند!
آیا معماری انواع تکنیک های پیشرانه فوق یکسان است؟
ساتون، شکل 1-7; ترکیبی از موتورهای جت کانالی و موتورهای موشکی
شکل 1-7. نمودار ساده شده یک موشک هوا پرتاب با پیشرانه راکت-رمجت یکپارچه. پس از مصرف سوخت جامد در افزایش سرعت وسیله نقلیه به پرواز، محفظه احتراق موشک به محفظه احتراق رم جت تبدیل می شود که هوا سوخت مایع رم جت را می سوزاند. مکانیسم های جرقه زن و فرمان نشان داده نمی شوند.
سیستمهای محرکه موشکهای مجرای، که گاهی اوقات سیستمهای راکتی تقویتشده با هوا نامیده میشوند، اصول موتورهای موشک و رم جت را ترکیب میکنند. آنها نسبت به موتورهای موشک شیمیایی عملکرد بالاتری دارند (ضربه ویژه) اما فقط می توانند در جو زمین کار کنند. معمولاً اصطلاح موشک تقویت شده با هوا به اختلاط هوا با اگزوز موشک (سوخت غنی شده برای پسسوختن) به نسبتهایی اشاره میکند که پیشرانه را قادر میسازد ویژگیهایی را حفظ کند که نمونه موتورهای موشک است، برای مثال، رانش استاتیک بالا و رانش بالا. -نسبت به وزن در مقابل، موشک مجرای اغلب مانند یک رم جت است که باید تا سرعت عملیاتی تقویت شود و از اجزای موشک بیشتر به عنوان یک مولد گاز غنی از سوخت (مایع یا جامد) استفاده می کند.
عملکرد سیستم های راکتی و رامجت ها قابل ترکیب است. نمونه ای از این دو، سیستم های پیشرانه ای هستند که به ترتیب و سپس پشت سر هم کار می کنند و در عین حال از حجم محفظه احتراق مشترک استفاده می کنند، همانطور که در شکل 1-7 نشان داده شده است. چنین پیکربندی کم حجمی که به نام راکت-رمجت یکپارچه شناخته می شود، جذاب بوده است.
در اینجا سه دستگاه مختلف توضیح داده شده است. دو مورد دوم ارتباط نزدیکی دارند، در حالی که اولی متفاوت است.
تصویری که قرار دادهاید دستگاهی است که ابتدا به عنوان یک موشک عمل میکند تا زمانی که پیشران موشک جامد آن تمام شود، و سپس برای استفاده از محفظه موشک بهعنوان محفظه رمجت پیکربندی مجدد میشود. قبل از اتمام پیشران موشک جامد نمی تواند به عنوان یک رمجت عمل کند و همچنین نمی تواند معکوس را انجام دهد. این در نهایت یک ترفند صرفه جویی انبوه است، به عنوان مثال، با پرتاب کردن مرحله موشک جامد و داشتن یک موتور رم جت مجزا.
سیستم های موشکی تقویت شده با هوا دستگاهی کاملا متفاوت هستند. آنها با استفاده از یک ورودی و مجرای هوا برای وارد کردن هوا به جریان خروجی موشک کار می کنند، بنابراین تا زمانی که ورودی جو در دسترس باشد، به طور قابل توجهی ضربه خاص را بهبود می بخشند.
"راکت مجرای" به نوبه خود شبیه چیزی است که نویسنده کتاب جرقه زنی آن را "راموکت" می نامد، که در آن از یک موتور موشک استفاده می شود که یا بسیار غنی از سوخت می سوزد یا در غیر این صورت یک اگزوز قابل اشتعال تولید می کند، که سپس می تواند رانش راکت یا در داخل را ایجاد کند. نوبت به عنوان سوخت برای یک رم جت خدمت می کند. در Ignition این ایده ذکر شد که این می تواند به عنوان یک رمجت خود تقویت کننده عمل کند.
هنگام بررسی مبحثی به نام "ترکیب موتورهای جت مجرای و موتورهای موشکی" در فصل 1 عناصر پیشرانه موشک ساتون و بیبلارز، ویرایش نهم، بخش زیر را پیدا کردم.
خط 2 می گوید که پیشرانه موشک تقویت شده با هوا اصول را ترکیب می کند در حالی که خط 1 از پاراگراف 2 می گوید که پیشرانه موشک-رمجت یکپارچه اقدامات موشک و رام جت را ترکیب می کند!
آیا معماری انواع تکنیک های پیشرانه فوق یکسان است؟
ساتون، شکل 1-7; ترکیبی از موتورهای جت کانالی و موتورهای موشکی
شکل 1-7. نمودار ساده شده یک موشک هوا پرتاب با پیشرانه راکت-رمجت یکپارچه. پس از مصرف سوخت جامد در افزایش سرعت وسیله نقلیه به پرواز، محفظه احتراق موشک به محفظه احتراق رم جت تبدیل می شود که هوا سوخت مایع رم جت را می سوزاند. مکانیسم های جرقه زن و فرمان نشان داده نمی شوند.
سیستمهای محرکه موشکهای مجرای، که گاهی اوقات سیستمهای راکتی تقویتشده با هوا نامیده میشوند، اصول موتورهای موشک و رم جت را ترکیب میکنند. آنها نسبت به موتورهای موشک شیمیایی عملکرد بالاتری دارند (ضربه ویژه) اما فقط می توانند در جو زمین کار کنند. معمولاً اصطلاح موشک تقویت شده با هوا به اختلاط هوا با اگزوز موشک (سوخت غنی شده برای پسسوختن) به نسبتهایی اشاره میکند که پیشرانه را قادر میسازد ویژگیهایی را حفظ کند که نمونه موتورهای موشک است، برای مثال، رانش استاتیک بالا و رانش بالا. -نسبت به وزن در مقابل، موشک مجرای اغلب مانند یک رم جت است که باید تا سرعت عملیاتی تقویت شود و از اجزای موشک بیشتر به عنوان یک مولد گاز غنی از سوخت (مایع یا جامد) استفاده می کند.
عملکرد سیستم های راکتی و رامجت ها قابل ترکیب است. نمونه ای از این دو، سیستم های پیشرانه ای هستند که به ترتیب و سپس پشت سر هم کار می کنند و در عین حال از حجم محفظه احتراق مشترک استفاده می کنند، همانطور که در شکل 1-7 نشان داده شده است. چنین پیکربندی کم حجمی که به نام راکت-رمجت یکپارچه شناخته می شود، جذاب بوده است.
در اینجا سه دستگاه مختلف توضیح داده شده است. دو مورد دوم ارتباط نزدیکی دارند، در حالی که اولی متفاوت است.
تصویری که قرار دادهاید دستگاهی است که ابتدا به عنوان یک موشک عمل میکند تا زمانی که پیشران موشک جامد آن تمام شود، و سپس برای استفاده از محفظه موشک بهعنوان محفظه رمجت پیکربندی مجدد میشود. قبل از اتمام پیشران موشک جامد نمی تواند به عنوان یک رمجت عمل کند و همچنین نمی تواند معکوس را انجام دهد. این در نهایت یک ترفند صرفه جویی انبوه است، به عنوان مثال، با پرتاب کردن مرحله موشک جامد و داشتن یک موتور رم جت مجزا.
سیستم های موشکی تقویت شده با هوا دستگاهی کاملا متفاوت هستند. آنها با استفاده از یک ورودی و مجرای هوا برای وارد کردن هوا به جریان خروجی موشک کار می کنند، بنابراین تا زمانی که ورودی جو در دسترس باشد، به طور قابل توجهی ضربه خاص را بهبود می بخشند.
"راکت مجرای" به نوبه خود شبیه چیزی است که نویسنده کتاب جرقه زنی آن را "راموکت" می نامد، که در آن از یک موتور موشک استفاده می شود که یا بسیار غنی از سوخت می سوزد یا در غیر این صورت یک اگزوز قابل اشتعال تولید می کند، که سپس می تواند رانش راکت یا در داخل را ایجاد کند. نوبت به عنوان سوخت برای یک رم جت خدمت می کند. در Ignition این ایده ذکر شد که این می تواند به عنوان یک رمجت خود تقویت کننده عمل کند.

-
rohamavation
نام: roham hesami radرهام حسامی راد
محل اقامت: 100 مایلی شمال لندن جاده آیلستون، لستر، لسترشر. LE2
عضویت : سهشنبه ۱۳۹۹/۸/۲۰ - ۰۸:۳۴
پست: 3278-
سپاس: 5494
- جنسیت:
تماس:
Re: هوافضا
گریز از مرکز یک مدار (مسیر) که مستقیماً به سمت مرکز سقوط می کند چقدر است؟
گریز از مرکز یک مدار (مسیر) که مستقیماً به سمت مرکز سقوط می کند چقدر است؟
بحث زیر این پاسخ مرا به فکر واداشت.
یک مدار دایرهای دارای خروج از مرکز ε = 0، بیضیها 0<ε<1 (بین اما بدون احتساب 0 و 1)، و مدارهای سهموی و هذلولی به ترتیب ϵ=1 و >1 دارند.
اما اگر جسمی را در نزدیکی جسم گرانشی رها کنم و بگذارم مستقیماً به سمت جسمی که در امتداد یک خط مستقیم شتاب میگیرد بیفتد، چه؟
آیا این بخش مخروطی است؟ اگه هست اسمش چیه
گریز از مرکز این "مدار" چه خواهد بود؟
من حتی نمی دانم چگونه شروع کنم، یا اینکه این مورد محدود کننده چیست. آپوآپسیس محدود و غیر صفر دارد، اما اگر به سطح بدن برخورد نکند، فرض میکنم پریاپسیس صفر است.
خروج از مرکز 1.0 است.
خروج از مرکز e یک مدار را می توان از شعاع آپوآپس و پری آپس به صورت زیر یافت:
$e=\frac{r_a-r_p}{r_a+r_p}$
و نیم محور اصلی a قوطی نیز از:
$a=\frac{r_a+r_p}{2}$
اگر جسمی را به صورت افقی پرتاب کنید (سرعت عمود بر بردار موقعیت) اگر با سرعت کمتر از گریز پرتاب کنید، در مدار بسته قرار می گیرید، اگر دقیقاً با سرعت گریز پرتاب کنید، در مداری سهموی باز یا اگر آن را دقیقاً با سرعت فرار پرتاب کنید، در مدار هذلولی باز قرار می گیرید. از سرعت فرار بیشتر است
سرعتی وجود دارد که منجر به یک مدار دایره ای کامل با e=0 می شود. ممکن است این را "سرعت مدار دایره ای" نیز بنامیم. در معادله گریز از مرکز، اگر ra=rp همانطور که در مدار دایره ای انجام می دهد، می بینیم که صورت صفر است، در حالی که مخرج غیر صفر است، بنابراین کل کسر نیز صفر است.
اگر سرعتی کمتر از دایره پرتاب کنید، قبل از اینکه به سمت بالا برگردید، جسم به مرکز نزدیکتر می شود. هر چه جسم پایین تر باشد، پریاپس پایین تر است. در معادله خروج از مرکز، با کاهش rp، صورت رشد می کند در حالی که مخرج کوچک می شود، بنابراین کل کسر افزایش می یابد. هر چه آهسته تر پیش می رویم، برجستگی را افزایش می دهیم.
مورد محدود کننده این است که اگر آن را با سرعت صفر پرتاب کنید، یعنی آن را رها کنید.
برای جسمی که در یک میدان گرانشی حول یک جرم نقطه واقعی رها شده است، در نهایت به این نتیجه میرسیم که آپوآپس شعاعی است که جسم را در آن رها کردهاید، و پریاپس در صفر است. این یک مدار بسیار عجیب است، زیرا جسم برای رسیدن به مرکز زمان محدودی طول میکشد، اما درست زمانی که از مرکز عبور میکند، به سرعت بینهایت میرسد، جایی که یک چرخش 180 درجهای انجام میدهد و تا زمانی که به افت اولیه خود میرسد. ارتفاع با سرعت صفر و شروع یک چرخه دیگر. شما می توانید از قانون سوم کپلر برای تعیین زمان این مدار استفاده کنید، زیرا هنوز یک a کاملاً تعریف شده دارد.
یک جرم کروی متقارن با سطح معین (چگالی صفر در خارج از یک شعاع معین) میدان گرانشی یکسانی با میدان گرانشی یک جرم نقطه مرکزی در همه جای سطح آن دارد. بنابراین، جسمی که در بالای سطح در یک سیاره واقعیتر رها میشود، مداری مشابه مداری را که در همان شعاع بالای یک جرم نقطهای رها شده است، دنبال میکند تا زمانی که به سطح برخورد کند. اگر قرار بود از سطح عبور کند (مثلاً شما یک سوراخ ایجاد کرده اید) میدان گرانش زیر سطح با یک جرم نقطه ای یکسان نیست.
هر زمان که در یک بازی بیسبال هستم و یک پاپ فلای می بینم، همیشه فکر می کنم مسیری که توپ دنبال می کند واقعاً یک سهمی نیست، فقط انتهای یک بیضی بسیار کشیده است که اگر ادامه پیدا کند، آن را تشکیل می دهد. همان شکل نزدیک مرکز زمین.
در این حالت rp=0. کسر خروج از مرکز، صورت آن برابر با ra-0=ra و مخرج آن برابر با ra+0=ra است. خروج از مرکز دقیقاً 1.0 است.
"اگر e=1، آیا آن را به یک مدار سهمی تبدیل نمی کند؟" در این مورد، خیر. یک مدار سهمی دارای e=1 و a=∞ است، در حالی که مدار افت دارای e=1 است. اما به طور قطعی غیر نامتناهی a=ra/2.
این مورد حد نازک شدن و نازک شدن بیضی با دور شدن کانون ها است. در آن حد، یک کانون در مرکز، یکی در نقطه افت است، و بیضی عرض صفر اما طول محدود دارد.
در این تصویر، دایرهای که حرکت نمیکند، کرهای با شعاع 1 را نشان میدهد و بیضی که در حال حرکت است، مداری با شعاع آپوآپس ثابت 2.0 را نشان میدهد، اما گریز از مرکز متفاوتی دارد. بعداً یک اسکریپت سریع پایتون و voila!
توجه داشته باشید که اگر زمین را سوراخ کنید و جسمی را رها کنید این اتفاق نمی افتد. این فقط برای یک جرم نقطه ای واقعی صدق می کند و نسبیت را در نظر نمی گیرد (یک جرم نقطه ای واقعی یک تکینگی خواهد بود و جسم در مسیر پایین از افق رویداد عبور می کند و هرگز به بالا باز نمی گردد).
گریز از مرکز مدار شعاعی بدون توجه به انرژی آن 1 است.
این دسته ای از مدارها است که نوع مدار را نمی توان به تنهایی از خروج از مرکز استنباط کرد. با یک مدار سهموی "سنتی" e=1، تکانه زاویه ای L دارای مقدار مشخصی است، اما محور نیمه اصلی a تعریف نشده است. در مورد مدار سقوط آزاد محدود عمودی، محور نیمه اصلی a یک مقدار خوب تعریف شده است و تکانه زاویه ای L 0 است.
معادله مربوط به حرکت زاویه ای به گریز از مرکز و محور نیمه اصلی نشان می دهد که چگونه می توان خروج از مرکز را با توجه به تکانه زاویه ای محاسبه کرد.
$l = \sqrt{\mu a(1-e^2)}$
برای یک مدار سهموی، a→inf، بنابراین تعیین تکانه زاویه ای از طریق این فرمول کار نمی کند. با این حال، برای مدارهای شعاعی که جسم دقیقاً با سرعت فرار حرکت نمی کند، این فرمول به خوبی تعریف شده است. به این معنی است که خروج از مرکز برای یک مسیر شعاعی، بدون توجه به انرژی، 1 است. مقاله ویکی پدیا در مورد گریز از مرکز مداری این را تأیید می کند.
مسیرهای شعاعی بر اساس انرژی مدار و نه برونگرایی بهعنوان بیضوی، سهموی یا هذلولی طبقهبندی میشوند. مدارهای شعاعی دارای تکانه زاویه ای صفر و از این رو خروج از مرکز برابر با یک هستند. با ثابت نگه داشتن انرژی و کاهش تکانه زاویه ای، مدارهای بیضوی، سهمی و هذلولی هر کدام به نوع خط سیر شعاعی مربوطه تمایل دارند در حالی که e به 1 میل می کند (یا در حالت سهموی، 1 باقی می ماند).
تعاریف چندگانه به مدار شعاعی اجازه می دهد که خروج از مرکز یک نیز داشته باشد.
$e = \frac{r_a-r_p}{r_a+r_p}$
$e = \sqrt{1 + \frac{2\epsilon l^2}{\mu^2}}$
با ϵ انرژی مداری خاص است. با این حال، استفاده از موارد دیگر با خروج از مرکز به عنوان ورودی ممکن است به نتایج نامشخصی منجر شود. یعنی تعریف پارامتری در θ=0 ناموفق است:
$r = \frac{a(1-e^2)}{1-e\cos\theta}$
بنابراین نتیجه این است که مدار شعاعی بدون توجه به انرژی آن خروج از مرکز 1 دارد. با این حال، تلاش برای استفاده از خروج از مرکز برای محاسبات مداری ممکن است به نتایج نامشخصی منجر شود.
قبلاً اشاره کرده بودم که مقطع مخروطی یک خط است، اما فکر می کنم این اشتباه است، زیرا مدار را می توان محدود کرد (و در سؤال است) و این یک پاره خط است. بنابراین من کنجکاو هستم که برش مخروطی از یک مدار محدود (و برای آن مدار شعاعی انرژی مثبت).
گریز از مرکز یک مدار (مسیر) که مستقیماً به سمت مرکز سقوط می کند چقدر است؟
بحث زیر این پاسخ مرا به فکر واداشت.
یک مدار دایرهای دارای خروج از مرکز ε = 0، بیضیها 0<ε<1 (بین اما بدون احتساب 0 و 1)، و مدارهای سهموی و هذلولی به ترتیب ϵ=1 و >1 دارند.
اما اگر جسمی را در نزدیکی جسم گرانشی رها کنم و بگذارم مستقیماً به سمت جسمی که در امتداد یک خط مستقیم شتاب میگیرد بیفتد، چه؟
آیا این بخش مخروطی است؟ اگه هست اسمش چیه
گریز از مرکز این "مدار" چه خواهد بود؟
من حتی نمی دانم چگونه شروع کنم، یا اینکه این مورد محدود کننده چیست. آپوآپسیس محدود و غیر صفر دارد، اما اگر به سطح بدن برخورد نکند، فرض میکنم پریاپسیس صفر است.
خروج از مرکز 1.0 است.
خروج از مرکز e یک مدار را می توان از شعاع آپوآپس و پری آپس به صورت زیر یافت:
$e=\frac{r_a-r_p}{r_a+r_p}$
و نیم محور اصلی a قوطی نیز از:
$a=\frac{r_a+r_p}{2}$
اگر جسمی را به صورت افقی پرتاب کنید (سرعت عمود بر بردار موقعیت) اگر با سرعت کمتر از گریز پرتاب کنید، در مدار بسته قرار می گیرید، اگر دقیقاً با سرعت گریز پرتاب کنید، در مداری سهموی باز یا اگر آن را دقیقاً با سرعت فرار پرتاب کنید، در مدار هذلولی باز قرار می گیرید. از سرعت فرار بیشتر است
سرعتی وجود دارد که منجر به یک مدار دایره ای کامل با e=0 می شود. ممکن است این را "سرعت مدار دایره ای" نیز بنامیم. در معادله گریز از مرکز، اگر ra=rp همانطور که در مدار دایره ای انجام می دهد، می بینیم که صورت صفر است، در حالی که مخرج غیر صفر است، بنابراین کل کسر نیز صفر است.
اگر سرعتی کمتر از دایره پرتاب کنید، قبل از اینکه به سمت بالا برگردید، جسم به مرکز نزدیکتر می شود. هر چه جسم پایین تر باشد، پریاپس پایین تر است. در معادله خروج از مرکز، با کاهش rp، صورت رشد می کند در حالی که مخرج کوچک می شود، بنابراین کل کسر افزایش می یابد. هر چه آهسته تر پیش می رویم، برجستگی را افزایش می دهیم.
مورد محدود کننده این است که اگر آن را با سرعت صفر پرتاب کنید، یعنی آن را رها کنید.
برای جسمی که در یک میدان گرانشی حول یک جرم نقطه واقعی رها شده است، در نهایت به این نتیجه میرسیم که آپوآپس شعاعی است که جسم را در آن رها کردهاید، و پریاپس در صفر است. این یک مدار بسیار عجیب است، زیرا جسم برای رسیدن به مرکز زمان محدودی طول میکشد، اما درست زمانی که از مرکز عبور میکند، به سرعت بینهایت میرسد، جایی که یک چرخش 180 درجهای انجام میدهد و تا زمانی که به افت اولیه خود میرسد. ارتفاع با سرعت صفر و شروع یک چرخه دیگر. شما می توانید از قانون سوم کپلر برای تعیین زمان این مدار استفاده کنید، زیرا هنوز یک a کاملاً تعریف شده دارد.
یک جرم کروی متقارن با سطح معین (چگالی صفر در خارج از یک شعاع معین) میدان گرانشی یکسانی با میدان گرانشی یک جرم نقطه مرکزی در همه جای سطح آن دارد. بنابراین، جسمی که در بالای سطح در یک سیاره واقعیتر رها میشود، مداری مشابه مداری را که در همان شعاع بالای یک جرم نقطهای رها شده است، دنبال میکند تا زمانی که به سطح برخورد کند. اگر قرار بود از سطح عبور کند (مثلاً شما یک سوراخ ایجاد کرده اید) میدان گرانش زیر سطح با یک جرم نقطه ای یکسان نیست.
هر زمان که در یک بازی بیسبال هستم و یک پاپ فلای می بینم، همیشه فکر می کنم مسیری که توپ دنبال می کند واقعاً یک سهمی نیست، فقط انتهای یک بیضی بسیار کشیده است که اگر ادامه پیدا کند، آن را تشکیل می دهد. همان شکل نزدیک مرکز زمین.
در این حالت rp=0. کسر خروج از مرکز، صورت آن برابر با ra-0=ra و مخرج آن برابر با ra+0=ra است. خروج از مرکز دقیقاً 1.0 است.
"اگر e=1، آیا آن را به یک مدار سهمی تبدیل نمی کند؟" در این مورد، خیر. یک مدار سهمی دارای e=1 و a=∞ است، در حالی که مدار افت دارای e=1 است. اما به طور قطعی غیر نامتناهی a=ra/2.
این مورد حد نازک شدن و نازک شدن بیضی با دور شدن کانون ها است. در آن حد، یک کانون در مرکز، یکی در نقطه افت است، و بیضی عرض صفر اما طول محدود دارد.
در این تصویر، دایرهای که حرکت نمیکند، کرهای با شعاع 1 را نشان میدهد و بیضی که در حال حرکت است، مداری با شعاع آپوآپس ثابت 2.0 را نشان میدهد، اما گریز از مرکز متفاوتی دارد. بعداً یک اسکریپت سریع پایتون و voila!
توجه داشته باشید که اگر زمین را سوراخ کنید و جسمی را رها کنید این اتفاق نمی افتد. این فقط برای یک جرم نقطه ای واقعی صدق می کند و نسبیت را در نظر نمی گیرد (یک جرم نقطه ای واقعی یک تکینگی خواهد بود و جسم در مسیر پایین از افق رویداد عبور می کند و هرگز به بالا باز نمی گردد).
گریز از مرکز مدار شعاعی بدون توجه به انرژی آن 1 است.
این دسته ای از مدارها است که نوع مدار را نمی توان به تنهایی از خروج از مرکز استنباط کرد. با یک مدار سهموی "سنتی" e=1، تکانه زاویه ای L دارای مقدار مشخصی است، اما محور نیمه اصلی a تعریف نشده است. در مورد مدار سقوط آزاد محدود عمودی، محور نیمه اصلی a یک مقدار خوب تعریف شده است و تکانه زاویه ای L 0 است.
معادله مربوط به حرکت زاویه ای به گریز از مرکز و محور نیمه اصلی نشان می دهد که چگونه می توان خروج از مرکز را با توجه به تکانه زاویه ای محاسبه کرد.
$l = \sqrt{\mu a(1-e^2)}$
برای یک مدار سهموی، a→inf، بنابراین تعیین تکانه زاویه ای از طریق این فرمول کار نمی کند. با این حال، برای مدارهای شعاعی که جسم دقیقاً با سرعت فرار حرکت نمی کند، این فرمول به خوبی تعریف شده است. به این معنی است که خروج از مرکز برای یک مسیر شعاعی، بدون توجه به انرژی، 1 است. مقاله ویکی پدیا در مورد گریز از مرکز مداری این را تأیید می کند.
مسیرهای شعاعی بر اساس انرژی مدار و نه برونگرایی بهعنوان بیضوی، سهموی یا هذلولی طبقهبندی میشوند. مدارهای شعاعی دارای تکانه زاویه ای صفر و از این رو خروج از مرکز برابر با یک هستند. با ثابت نگه داشتن انرژی و کاهش تکانه زاویه ای، مدارهای بیضوی، سهمی و هذلولی هر کدام به نوع خط سیر شعاعی مربوطه تمایل دارند در حالی که e به 1 میل می کند (یا در حالت سهموی، 1 باقی می ماند).
تعاریف چندگانه به مدار شعاعی اجازه می دهد که خروج از مرکز یک نیز داشته باشد.
$e = \frac{r_a-r_p}{r_a+r_p}$
$e = \sqrt{1 + \frac{2\epsilon l^2}{\mu^2}}$
با ϵ انرژی مداری خاص است. با این حال، استفاده از موارد دیگر با خروج از مرکز به عنوان ورودی ممکن است به نتایج نامشخصی منجر شود. یعنی تعریف پارامتری در θ=0 ناموفق است:
$r = \frac{a(1-e^2)}{1-e\cos\theta}$
بنابراین نتیجه این است که مدار شعاعی بدون توجه به انرژی آن خروج از مرکز 1 دارد. با این حال، تلاش برای استفاده از خروج از مرکز برای محاسبات مداری ممکن است به نتایج نامشخصی منجر شود.
قبلاً اشاره کرده بودم که مقطع مخروطی یک خط است، اما فکر می کنم این اشتباه است، زیرا مدار را می توان محدود کرد (و در سؤال است) و این یک پاره خط است. بنابراین من کنجکاو هستم که برش مخروطی از یک مدار محدود (و برای آن مدار شعاعی انرژی مثبت).
-
rohamavation
نام: roham hesami radرهام حسامی راد
محل اقامت: 100 مایلی شمال لندن جاده آیلستون، لستر، لسترشر. LE2
عضویت : سهشنبه ۱۳۹۹/۸/۲۰ - ۰۸:۳۴
پست: 3278-
سپاس: 5494
- جنسیت:
تماس:
Re: هوافضا
من در حال ساخت یک کنترل کننده استفاده از PID هستم. معادله ای که برای یافتن شعاع دایره با توجه به زاویه کرانه و سرعت استفاده می شود : چگونه سرعت زاویه ای و شعاع یک پیچ را محاسبه کنیم؟
کاری که من انجام دادم این بود که سرعت و زاویه بانکی فعلی هواپیما را برای یافتن شعاع آن تعیین کردم. با کم کردن این مقدار شعاع با شعاع دایره مورد نیاز، تفاوت بین آنها را دریافت کردم. این تفاوت به PID "Roll from Radius Error loop" داده شد، این مقدار رول مورد نیاز را ایجاد کرد که به "Aileron from Roll loop" داده می شود و به این ترتیب شعاع دایره مورد نیاز به دست آمد. اما یک مشکل وجود داشت. Loiter در اطراف یک نقطه است اما با شبیه سازی فوق هواپیما در اطراف نقطه مورد نیاز پرسه نمی زند. به عبارت دیگر مرکز دایره جابجا شد. سوال من این است که چگونه می توانم در اطراف یک نقطه پرسه بزنم که ریاضی پشت آن چیست یا چگونه می توانم در اطراف یک نقطه خاص پرسه بزنم.آنچه شما ساخته اید یک کنترلر حلقه باز است. شما فاصله بین هواپیما و نقطه خاص را به حلقه کنترل بازگردانید. و بنابراین اگر هواپیما به طور لحظه ای از شعاع انحنای مورد نظر خود منحرف شود، شعاع مورد نظر را بازپس خواهد گرفت، اما اکنون مرکز دایره حرکت کرده است.
شما باید کنترلر خود را طوری برنامه ریزی کنید که نه تنها در یک شعاع مشخص پرواز کند، بلکه باید یک فاصله ثابت از یک نقطه خاص را نیز طی کند.
در مسیر ایده آل:
شعاع انحنا برابر با فاصله تا نقطه خاص است
بردار سرعت عمود بر بردار بین هواپیما و نقطه خاص است
فاصله تا نقطه خاص در مقدار هدف است.
حالا برای کنترلر:
شعاع انحنا را با زاویه بانک کنترل می کنید
شما بردار سرعت (زاویه مسیر) را با شعاع انحنا کنترل می کنید
شما فاصله تا نقطه خاص را با بردار سرعت کنترل می کنید.
مدل غیر خطی خواهد بود، بنابراین برای انحرافات بزرگتر از فاصله هدف، یک کنترل کننده PID بدون هیچ منطق محدود کننده ممکن است پایدار نباشد. ممکن است قبل از فعال کردن کنترلر چرخش ثابت، به منطق کنترلگر جداگانه نیاز داشته باشید تا هواپیما را به حالت اولیه قابل قبول برساند.
کاری که من انجام دادم این بود که سرعت و زاویه بانکی فعلی هواپیما را برای یافتن شعاع آن تعیین کردم. با کم کردن این مقدار شعاع با شعاع دایره مورد نیاز، تفاوت بین آنها را دریافت کردم. این تفاوت به PID "Roll from Radius Error loop" داده شد، این مقدار رول مورد نیاز را ایجاد کرد که به "Aileron from Roll loop" داده می شود و به این ترتیب شعاع دایره مورد نیاز به دست آمد. اما یک مشکل وجود داشت. Loiter در اطراف یک نقطه است اما با شبیه سازی فوق هواپیما در اطراف نقطه مورد نیاز پرسه نمی زند. به عبارت دیگر مرکز دایره جابجا شد. سوال من این است که چگونه می توانم در اطراف یک نقطه پرسه بزنم که ریاضی پشت آن چیست یا چگونه می توانم در اطراف یک نقطه خاص پرسه بزنم.آنچه شما ساخته اید یک کنترلر حلقه باز است. شما فاصله بین هواپیما و نقطه خاص را به حلقه کنترل بازگردانید. و بنابراین اگر هواپیما به طور لحظه ای از شعاع انحنای مورد نظر خود منحرف شود، شعاع مورد نظر را بازپس خواهد گرفت، اما اکنون مرکز دایره حرکت کرده است.
شما باید کنترلر خود را طوری برنامه ریزی کنید که نه تنها در یک شعاع مشخص پرواز کند، بلکه باید یک فاصله ثابت از یک نقطه خاص را نیز طی کند.
در مسیر ایده آل:
شعاع انحنا برابر با فاصله تا نقطه خاص است
بردار سرعت عمود بر بردار بین هواپیما و نقطه خاص است
فاصله تا نقطه خاص در مقدار هدف است.
حالا برای کنترلر:
شعاع انحنا را با زاویه بانک کنترل می کنید
شما بردار سرعت (زاویه مسیر) را با شعاع انحنا کنترل می کنید
شما فاصله تا نقطه خاص را با بردار سرعت کنترل می کنید.
مدل غیر خطی خواهد بود، بنابراین برای انحرافات بزرگتر از فاصله هدف، یک کنترل کننده PID بدون هیچ منطق محدود کننده ممکن است پایدار نباشد. ممکن است قبل از فعال کردن کنترلر چرخش ثابت، به منطق کنترلگر جداگانه نیاز داشته باشید تا هواپیما را به حالت اولیه قابل قبول برساند.
-
rohamavation
نام: roham hesami radرهام حسامی راد
محل اقامت: 100 مایلی شمال لندن جاده آیلستون، لستر، لسترشر. LE2
عضویت : سهشنبه ۱۳۹۹/۸/۲۰ - ۰۸:۳۴
پست: 3278-
سپاس: 5494
- جنسیت:
تماس:
Re: هوافضا
من با بچه ها راکت های بطری آب را پرتاب کرده ام و در حال ساخت شبیه سازی پرتاب با استفاده از روش های عددی هستیم. من یک
دانشجوی مهندس هوافضا هستم،
آیا می توانید یک توضیح شهودی به من بدهید که چرا دو روش زیر ضریب 2.0 تفاوت را برای رانش می دهند؟ کدام روش صحیح است؟
روش اول
رانش برابر است با سرعت جریان جرمی ضربدر سرعت اگزوز.$F=\dot{m}v$
نرخ جریان جرمی با استفاده از چگالی آب، ناحیه نازل و سرعت خروجی اگزوز یافت می شود.$\dot{m}=\rho A v$
با ترکیب به دست می آوریم
$F=\rho A v^2$مجذور سرعت اگزوز برابر با 2 برابر فشار گیج داخلی تقسیم بر چگالی آب است.
$v^2=2P/\rho$
با ترکیب می بینیم که رانش برابر با 2 برابر سطح نازل ضربدر فشار است.$F=2AP$
روش دوم
در تصویر زیر به نظر می رسد که رانش بر روی موشک باید برابر با عدم تعادل نیرو باشد که توسط فلش ها نشان داده شده است. این عدم تعادل نیرو، برابر فشار گیج داخلی ضربدر ناحیه نازل است.
$F=AP$
من فکر می کنم شکل زیر نمایش بهتری از نیروی رانش است. فشار داخلی (فلش های قرمز) در نزدیکی دهانه نازل کاهش می یابد زیرا سرعت جریان آب قابل توجه است. همچنین، فشار آب در دهانه نازل همانطور که در ابتدا تصور میکردم، در فشار صفر نیست. در عوض، فشار دینامیکی (فلش های سبز) وجود دارد که با سرعت جریان نسبت معکوس دارد. عدم تعادل نیرو برابر است با دو برابر فشار هوا در ناحیه نازل$، F=2AP.$
افت فشار از فشار مخزن به فشار اتمسفر فوراً در نازل رخ نمی دهد، بلکه بر اساس مساحت کانال جریان پخش می شود. این فشار کاهش یافته منجر به رانش اضافی می شود که در راه حل دوم شما در نظر گرفته نشده است. در اینجا یک راه برای محاسبه این تراست گمشده اضافی وجود دارد:
روش اول صحیح است. در مرحله دوم، شما فرض کرده اید که فشار در نازل با وجود خروج آب با سرعت کمی، همچنان P است. یعنی فشار دینامیکی را نادیده گرفته اید.
شما باید از اصل برنولی استفاده کنید
$P + \frac{\rho v^2}{2} + \rho h g = {\rm constant}$
روش اول شما فرض می کند که سطح بالایی آب به سختی حرکت می کند (زیرا مساحت سطح آن بسیار بزرگتر از ناحیه نازل است). با اعمال همین ایده برای روش دوم، می توانیم ثابت را هم در آب و هم بلافاصله زیر نازل به صورت محاسبه کنیم.
$P = P_A + \frac{\rho v^2}{2},$
که در آن $P_A$ فشار اتمسفر است و ما از عبارت$ ρhg$ کوچک غفلت می کنیم که فشار را به دلیل ستون مایع بالای نازل در LHS افزایش می دهد. اگر بیشتر فرض کنیم که$P \gg P_A$آنگاه$P = \rho v^2/2$و نرخ تغییر تکانه مایع از نازل برابر است.
$F = \rho A v^2 = 2PA$
افت فشار از فشار مخزن به فشار اتمسفر فوراً در نازل رخ نمی دهد، بلکه بر اساس مساحت کانال جریان پخش می شود. این کاهش فشار منجر به رانش اضافی می شود که در راه حل دوم شما در نظر گرفته نشده است. در اینجا یک راه برای محاسبه این تراست گمشده اضافی وجود دارد:
معادله برنولی (معادله دوم تا آخرین شما) اعمال می شود:
$P + \frac{\rho v^2}{2} + \rho h g = {\rm constant}$
ما می توانیم این را با معادله جریان جرمی ترکیب کنیم تا به دست آوریم:
$P+\frac12\rho \left(\frac{\dot m}{\rho A}\right)^2 = constant$
پاسخاصلی شما سرعت ناچیز/منطقه بزرگ در سطح آب را فرض میکند:
$P_{tank} + 0 = constant$این ثابت ما را به ما می دهد:
$P+\frac12\rho \left(\frac{\dot m}{\rho A}\right)^2 = P_{tank}$
و ما می دانیم که فشار در خروجی اتمسفر / فشار 0 گیج است:
$0 + \frac12\rho \left(\frac{\dot m}{\rho A_{exit}}\right)^2 = P_{tank}$
ما می توانیم برای $\dot m$ حل کنیم:
$\dot m = A_{exit}\sqrt{2 \rho P_{tank}}$
اتصال مجدد
$P+P_{tank}\left(\frac{A_{exit}}{A}\right)^2 = P_{tank}$
حل فشار:$P = P_{tank} \left(1-\left(\frac{A_{exit}}{A}\right)^2\right)$
بنابراین اگر بخواهیم نیروی رانش اضافی را به دلیل پایین بودن فشار در نزدیکی نازل محاسبه کنیم، باید فشار را با ناحیه یکپارچه کنیم:
$F = F_{up} - F_{down} = \int_{A_{exit}}^\infty \left (P_{tank} - P_{tank} \left(1-\left(\frac{A_{exit}}{A}\right)^2\right) \right) \; dA$
$F = P_{tank} \int_{A_{exit}}^\infty \frac{{A_{exit}}^2}{A^2} \; dA$
$F = P_{tank} A_{exit}$
بنابراین PA گم شده از راه حل دوم شما وجود دارد.
1: می توانید معادلات خود را دقیق تر کنید (مخصوصاً برای موشک های بطری نازک) با استفاده از سطح مقطع واقعی در سطح آب به جای بی نهایت، هم در اینجا و هم در حد انتگرال.
دانشجوی مهندس هوافضا هستم،
آیا می توانید یک توضیح شهودی به من بدهید که چرا دو روش زیر ضریب 2.0 تفاوت را برای رانش می دهند؟ کدام روش صحیح است؟
روش اول
رانش برابر است با سرعت جریان جرمی ضربدر سرعت اگزوز.$F=\dot{m}v$
نرخ جریان جرمی با استفاده از چگالی آب، ناحیه نازل و سرعت خروجی اگزوز یافت می شود.$\dot{m}=\rho A v$
با ترکیب به دست می آوریم
$F=\rho A v^2$مجذور سرعت اگزوز برابر با 2 برابر فشار گیج داخلی تقسیم بر چگالی آب است.
$v^2=2P/\rho$
با ترکیب می بینیم که رانش برابر با 2 برابر سطح نازل ضربدر فشار است.$F=2AP$
روش دوم
در تصویر زیر به نظر می رسد که رانش بر روی موشک باید برابر با عدم تعادل نیرو باشد که توسط فلش ها نشان داده شده است. این عدم تعادل نیرو، برابر فشار گیج داخلی ضربدر ناحیه نازل است.
$F=AP$
من فکر می کنم شکل زیر نمایش بهتری از نیروی رانش است. فشار داخلی (فلش های قرمز) در نزدیکی دهانه نازل کاهش می یابد زیرا سرعت جریان آب قابل توجه است. همچنین، فشار آب در دهانه نازل همانطور که در ابتدا تصور میکردم، در فشار صفر نیست. در عوض، فشار دینامیکی (فلش های سبز) وجود دارد که با سرعت جریان نسبت معکوس دارد. عدم تعادل نیرو برابر است با دو برابر فشار هوا در ناحیه نازل$، F=2AP.$
افت فشار از فشار مخزن به فشار اتمسفر فوراً در نازل رخ نمی دهد، بلکه بر اساس مساحت کانال جریان پخش می شود. این فشار کاهش یافته منجر به رانش اضافی می شود که در راه حل دوم شما در نظر گرفته نشده است. در اینجا یک راه برای محاسبه این تراست گمشده اضافی وجود دارد:
روش اول صحیح است. در مرحله دوم، شما فرض کرده اید که فشار در نازل با وجود خروج آب با سرعت کمی، همچنان P است. یعنی فشار دینامیکی را نادیده گرفته اید.
شما باید از اصل برنولی استفاده کنید
$P + \frac{\rho v^2}{2} + \rho h g = {\rm constant}$
روش اول شما فرض می کند که سطح بالایی آب به سختی حرکت می کند (زیرا مساحت سطح آن بسیار بزرگتر از ناحیه نازل است). با اعمال همین ایده برای روش دوم، می توانیم ثابت را هم در آب و هم بلافاصله زیر نازل به صورت محاسبه کنیم.
$P = P_A + \frac{\rho v^2}{2},$
که در آن $P_A$ فشار اتمسفر است و ما از عبارت$ ρhg$ کوچک غفلت می کنیم که فشار را به دلیل ستون مایع بالای نازل در LHS افزایش می دهد. اگر بیشتر فرض کنیم که$P \gg P_A$آنگاه$P = \rho v^2/2$و نرخ تغییر تکانه مایع از نازل برابر است.
$F = \rho A v^2 = 2PA$
افت فشار از فشار مخزن به فشار اتمسفر فوراً در نازل رخ نمی دهد، بلکه بر اساس مساحت کانال جریان پخش می شود. این کاهش فشار منجر به رانش اضافی می شود که در راه حل دوم شما در نظر گرفته نشده است. در اینجا یک راه برای محاسبه این تراست گمشده اضافی وجود دارد:
معادله برنولی (معادله دوم تا آخرین شما) اعمال می شود:
$P + \frac{\rho v^2}{2} + \rho h g = {\rm constant}$
ما می توانیم این را با معادله جریان جرمی ترکیب کنیم تا به دست آوریم:
$P+\frac12\rho \left(\frac{\dot m}{\rho A}\right)^2 = constant$
پاسخاصلی شما سرعت ناچیز/منطقه بزرگ در سطح آب را فرض میکند:
$P_{tank} + 0 = constant$این ثابت ما را به ما می دهد:
$P+\frac12\rho \left(\frac{\dot m}{\rho A}\right)^2 = P_{tank}$
و ما می دانیم که فشار در خروجی اتمسفر / فشار 0 گیج است:
$0 + \frac12\rho \left(\frac{\dot m}{\rho A_{exit}}\right)^2 = P_{tank}$
ما می توانیم برای $\dot m$ حل کنیم:
$\dot m = A_{exit}\sqrt{2 \rho P_{tank}}$
اتصال مجدد
$P+P_{tank}\left(\frac{A_{exit}}{A}\right)^2 = P_{tank}$
حل فشار:$P = P_{tank} \left(1-\left(\frac{A_{exit}}{A}\right)^2\right)$
بنابراین اگر بخواهیم نیروی رانش اضافی را به دلیل پایین بودن فشار در نزدیکی نازل محاسبه کنیم، باید فشار را با ناحیه یکپارچه کنیم:
$F = F_{up} - F_{down} = \int_{A_{exit}}^\infty \left (P_{tank} - P_{tank} \left(1-\left(\frac{A_{exit}}{A}\right)^2\right) \right) \; dA$
$F = P_{tank} \int_{A_{exit}}^\infty \frac{{A_{exit}}^2}{A^2} \; dA$
$F = P_{tank} A_{exit}$
بنابراین PA گم شده از راه حل دوم شما وجود دارد.
1: می توانید معادلات خود را دقیق تر کنید (مخصوصاً برای موشک های بطری نازک) با استفاده از سطح مقطع واقعی در سطح آب به جای بی نهایت، هم در اینجا و هم در حد انتگرال.
آخرین ویرایش توسط rohamavation دوشنبه ۱۴۰۱/۸/۲ - ۰۸:۰۶, ویرایش شده کلا 1 بار
-
rohamavation
نام: roham hesami radرهام حسامی راد
محل اقامت: 100 مایلی شمال لندن جاده آیلستون، لستر، لسترشر. LE2
عضویت : سهشنبه ۱۳۹۹/۸/۲۰ - ۰۸:۳۴
پست: 3278-
سپاس: 5494
- جنسیت:
تماس:
Re: هوافضا
بفهمم که یک نازل چه تأثیری بر رانش تولید شده دارد. تئوری من به این صورت است: اگر قطر خروجی مجرا را کاهش دهم، فشار کاهش مییابد و سرعت هوا و در نتیجه رانش افزایش مییابد. در نتیجه، شما یک قطر خروجی کوچک می خواهید.
با این حال، در آزمایشهایم، نیروی رانش یک پروانه 12×12 اینچی را در حدود 5500 دور در دقیقه اندازهگیری کردم و 20 نیوتن بدون نازل (فقط یک کانال با قطر ثابت) و تنها 4 نیوتن با نازلی که قطر خروجی را تا 50 درصد قطر پروپ کاهش میدهد، به دست آوردم. .
این نتایج برخلاف نظریه من است! کسی توضیحی برای این موضوع داره؟ و چه چیزی را باید تغییر دهم تا در واقع نیروی رانش را در مقایسه با پایه بدون نازل افزایش دهم؟
.پروانه و احتمالاً ایجاد مقداری جریان معکوس شد.
طراحی نازل موضوع پیچیده ای است. من نمی توانم راهی برای فشرده کردن آن، حتی محدود به یک مورد خاص، به یک پاسخ مناسب بیاندیشم. شاید من خودم آن را به اندازه کافی درک نمی کنم. این را در نظر داشته باشید؛ تصویر زیر تنها یک قطعه کوچک از کل است و به هیچ وجه تصویر کاملی ندارد.
به طور کلی، وظیفه یک نازل این است که فشار خروجی موتور جت را با فشار خارج از آن مطابقت دهد. اگر فشار متفاوت باشد، در خارج از موتور، جایی که نیروی رانش تولید نمی کند، مطابقت می یابد.
هنگامی که موتور یک موشک است، که فشار بالایی ایجاد می کند، نازل نیاز به انبساط گاز دارد و از طریق عمل بر روی نازل، فشار را به رانش تبدیل می کند. هنگامی که موتور یک فن سرد است که هوا را تسریع می کند، برعکس است - نازل باید افت فشار را با کمی فشرده سازی جبران کند، به طوری که جریان هوا بتواند بدون مقابله با فشار هوای بیرون در پشت خارج شود.
برای یک نازل همگرا مهم است که اگزوز را به فشاری بالاتر از هوای بیرون فشرده نکند، در غیر این صورت نیروی رانش را از بین می برد. این مورد شما بود، نازل خیلی باریک بود، بنابراین هوا را به بالاتر از محیط فشرده می کرد - که باعث شد سعی کند از طریق فن برگردد.
برای دادن یک پاسخ عملی، یک نازل بهینه در این سرعت ها بسیار شبیه به یک مجرای ساده است که در انتها فقط یک یا دو درصد باریک می شود و شکل خروجی صافی دارد.
، احتمالاً با انقباض نازل، مقداری کشش در قسمت بیرونی نازل اضافه خواهید کرد. هوای جریان در اطراف آن در صورت زاویه انقباض جدا می شود
بیش از حد شیب دار است
کمی انقباض منطقی است، زیرا جریان تسریع شده پشت پروانه برای جریان جرمی معین به مقطع کمتری نیاز دارد. همچنین میخواهید که سطح تصویربرداری را کمی بزرگتر از سطح مقطع در صفحه پروانه کنید. فقط افزایش سرعت را از طریق دیسک پروانه محاسبه کنید و فرض کنید که نیمی از آن در صفحه پروانه رسیده است. این اطمینان حاصل می کند که فشار در طول کل مجرا تقریباً ثابت است و تلفات به حداقل می رسد.
این موضوعی است که اهالی هلیکوپتر به آن فکر زیادی کرده اند. از این شکل از لیشمن میتوانیم ببینیم که پی به خودی خود منقبض میشود.
پوشش انقباضی در تنظیمات آزمایشی شما، دقیقاً در پشت پروانه فشار بیشتری نسبت به اگزوز پوشش دارد. این گرادیان فشار استاتیک، نیرویی را بر ناحیه کفن وارد میکند که منجر به رانش منفی میشود. به علاوه نیروهای اصطکاک از جریان هوا در مجرای.
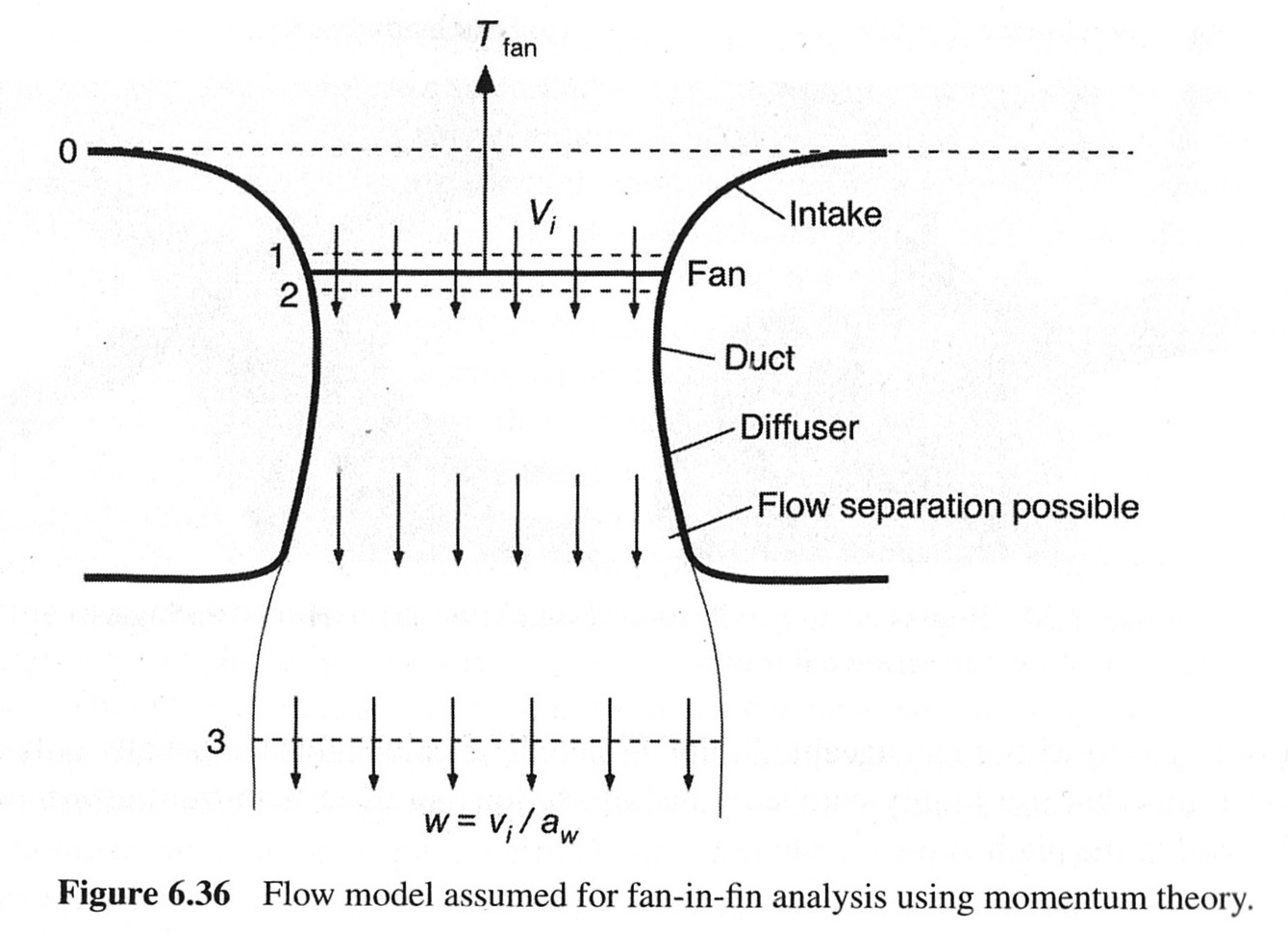
همین کتاب دارای یک رساله در مورد طراحی فن در فین روتور دم بر اساس تئوری تکانه است که در واقع یک شکل در حال گشاد شدن را به تصویر می کشد. .
معادله رانش، رانش = جرم x شتاب را به ما می دهد
شما سرعت هوا را افزایش دادید اما جریان هوا را کاهش دادید.
این کار عالی است و شما شروع خوبی دارید. ممکن است بخواهید طراحی موتور جت را مرور کنید. به نظر می رسد آنچه شما می سازید نیمه کمپرسور است. باریک کردن "انتهای اگزوز" باعث افزایش فشار در مجرای می شود، این همان کاری است که شما می خواهید کمپرسور انجام دهد. حرکت رو به جلو که هنگام اعمال بر روی هواپیما ایجاد می شود به این تأثیر می افزاید. این می تواند یک "اسکوپ" هوا برای یک موتور پیستونی باشد!
بهترین راه برای آزمایش طرح های شما ممکن است دریچه گاز کامل در پرواز سطح باشد، زیرا این کار همچنین داده های درگ ناسل را به شما می دهد. مقایسههای حداکثر سرعت احتمالاً تا حد زیادی نشان میدهد که یک تکیهگاه با شیب مناسب و بدون مجرای تست راندمان نیروی رانش را به دست میآورد، اما نه بدون آموختن چیزهای زیادی.
فنهای کانالی در طرحهای مدلهای مقیاسی عالی به نظر میرسند، اما به طور کلی باتریها را بسیار سریعتر از پایهها تخلیه میکنند. آنها در سرعتهای بسیار کم یا شناور مزایایی دارند، اما وسایل نقلیه از حدود 50 تا حدود 400 مایل در ساعت سرعت میگیرند.
با این حال، در آزمایشهایم، نیروی رانش یک پروانه 12×12 اینچی را در حدود 5500 دور در دقیقه اندازهگیری کردم و 20 نیوتن بدون نازل (فقط یک کانال با قطر ثابت) و تنها 4 نیوتن با نازلی که قطر خروجی را تا 50 درصد قطر پروپ کاهش میدهد، به دست آوردم. .
این نتایج برخلاف نظریه من است! کسی توضیحی برای این موضوع داره؟ و چه چیزی را باید تغییر دهم تا در واقع نیروی رانش را در مقایسه با پایه بدون نازل افزایش دهم؟
.پروانه و احتمالاً ایجاد مقداری جریان معکوس شد.
طراحی نازل موضوع پیچیده ای است. من نمی توانم راهی برای فشرده کردن آن، حتی محدود به یک مورد خاص، به یک پاسخ مناسب بیاندیشم. شاید من خودم آن را به اندازه کافی درک نمی کنم. این را در نظر داشته باشید؛ تصویر زیر تنها یک قطعه کوچک از کل است و به هیچ وجه تصویر کاملی ندارد.
به طور کلی، وظیفه یک نازل این است که فشار خروجی موتور جت را با فشار خارج از آن مطابقت دهد. اگر فشار متفاوت باشد، در خارج از موتور، جایی که نیروی رانش تولید نمی کند، مطابقت می یابد.
هنگامی که موتور یک موشک است، که فشار بالایی ایجاد می کند، نازل نیاز به انبساط گاز دارد و از طریق عمل بر روی نازل، فشار را به رانش تبدیل می کند. هنگامی که موتور یک فن سرد است که هوا را تسریع می کند، برعکس است - نازل باید افت فشار را با کمی فشرده سازی جبران کند، به طوری که جریان هوا بتواند بدون مقابله با فشار هوای بیرون در پشت خارج شود.
برای یک نازل همگرا مهم است که اگزوز را به فشاری بالاتر از هوای بیرون فشرده نکند، در غیر این صورت نیروی رانش را از بین می برد. این مورد شما بود، نازل خیلی باریک بود، بنابراین هوا را به بالاتر از محیط فشرده می کرد - که باعث شد سعی کند از طریق فن برگردد.
برای دادن یک پاسخ عملی، یک نازل بهینه در این سرعت ها بسیار شبیه به یک مجرای ساده است که در انتها فقط یک یا دو درصد باریک می شود و شکل خروجی صافی دارد.
، احتمالاً با انقباض نازل، مقداری کشش در قسمت بیرونی نازل اضافه خواهید کرد. هوای جریان در اطراف آن در صورت زاویه انقباض جدا می شود
بیش از حد شیب دار است
کمی انقباض منطقی است، زیرا جریان تسریع شده پشت پروانه برای جریان جرمی معین به مقطع کمتری نیاز دارد. همچنین میخواهید که سطح تصویربرداری را کمی بزرگتر از سطح مقطع در صفحه پروانه کنید. فقط افزایش سرعت را از طریق دیسک پروانه محاسبه کنید و فرض کنید که نیمی از آن در صفحه پروانه رسیده است. این اطمینان حاصل می کند که فشار در طول کل مجرا تقریباً ثابت است و تلفات به حداقل می رسد.
این موضوعی است که اهالی هلیکوپتر به آن فکر زیادی کرده اند. از این شکل از لیشمن میتوانیم ببینیم که پی به خودی خود منقبض میشود.
پوشش انقباضی در تنظیمات آزمایشی شما، دقیقاً در پشت پروانه فشار بیشتری نسبت به اگزوز پوشش دارد. این گرادیان فشار استاتیک، نیرویی را بر ناحیه کفن وارد میکند که منجر به رانش منفی میشود. به علاوه نیروهای اصطکاک از جریان هوا در مجرای.
همین کتاب دارای یک رساله در مورد طراحی فن در فین روتور دم بر اساس تئوری تکانه است که در واقع یک شکل در حال گشاد شدن را به تصویر می کشد. .
معادله رانش، رانش = جرم x شتاب را به ما می دهد
شما سرعت هوا را افزایش دادید اما جریان هوا را کاهش دادید.
این کار عالی است و شما شروع خوبی دارید. ممکن است بخواهید طراحی موتور جت را مرور کنید. به نظر می رسد آنچه شما می سازید نیمه کمپرسور است. باریک کردن "انتهای اگزوز" باعث افزایش فشار در مجرای می شود، این همان کاری است که شما می خواهید کمپرسور انجام دهد. حرکت رو به جلو که هنگام اعمال بر روی هواپیما ایجاد می شود به این تأثیر می افزاید. این می تواند یک "اسکوپ" هوا برای یک موتور پیستونی باشد!
بهترین راه برای آزمایش طرح های شما ممکن است دریچه گاز کامل در پرواز سطح باشد، زیرا این کار همچنین داده های درگ ناسل را به شما می دهد. مقایسههای حداکثر سرعت احتمالاً تا حد زیادی نشان میدهد که یک تکیهگاه با شیب مناسب و بدون مجرای تست راندمان نیروی رانش را به دست میآورد، اما نه بدون آموختن چیزهای زیادی.
فنهای کانالی در طرحهای مدلهای مقیاسی عالی به نظر میرسند، اما به طور کلی باتریها را بسیار سریعتر از پایهها تخلیه میکنند. آنها در سرعتهای بسیار کم یا شناور مزایایی دارند، اما وسایل نقلیه از حدود 50 تا حدود 400 مایل در ساعت سرعت میگیرند.
-
rohamavation
نام: roham hesami radرهام حسامی راد
محل اقامت: 100 مایلی شمال لندن جاده آیلستون، لستر، لسترشر. LE2
عضویت : سهشنبه ۱۳۹۹/۸/۲۰ - ۰۸:۳۴
پست: 3278-
سپاس: 5494
- جنسیت:
تماس:
Re: هوافضا
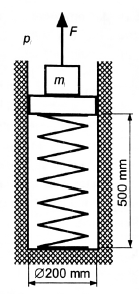
بیان می کند که با توجه به یک سیلندر عایق که حاوی یک فنر و یک گاز ایده آل است، باید کار مورد نیاز برای فشرده سازی گاز، کار مورد نیاز برای فشرده سازی فنر، کار انجام شده توسط فشار اتمسفر p (p=1 bar) کار انجام شده را محاسبه کنید. توسط بلوک m و نیروی کشش در پایان فرآیند. جرم پیستون ناچیز است، فنر دارای یک ثابت فنر k=200 نیوتن بر سانتی متر است، حالت اولیه گاز $p_1 = 0.8 \ bar, \vartheta_1=20°C$، بلوک توسط نیروی کششی F نگه داشته می شود. بلوک روی پیستون پایین می آید به طوری که باعث می شود پیستون 0.2 متر پایین بیاید، وزن بلوک 10000 نیوتن است، گاز ایده آل دارای توان ایزنتروپیک κ=1,37 است.
حالا سوال من اینه:
اگر من تصمیم بگیرم که مرز سیستم خود را در اطراف فنر و گاز تنظیم کنم، بنابراین تنها اشیایی که در حال مطالعه هستم اسپنگ و گاز هستند، اعمال قانون اول ترمودینامیک باید این را به من بدهد:
$Q_{12}=W_{12}+\Delta U + \Delta E_{ep}$
جایی که $\Delta E_{ep}$ تغییر در انرژی پتانسیل الاستیک فنر است. چیزی که مرا آزار می دهد این است که W12 دقیقا چیست؟
کار انجام شده توسط اسپینگ در اثر نیروی فنر و تغییر شکل فنر:
$W_{spring}=-\Delta E_{ep}=-\frac{k}{2}(\delta_2-\delta_1)$
که در آن δ2 و δ1 تغییر شکل های نهایی و اولیه فنر هستند
کار انجام شده توسط گرانش روی بلوک:
$W_{gravity}=-\Delta E_{gp}=-mg(z_2-z_1)$
جایی که $\Delta E_{gp}$ تغییر انرژی پتانسیل گرانشی بلوک، z2 ارتفاع نهایی و z1 ارتفاع اولیه با استفاده از پایین استوانه به عنوان مرجع است.
کار انجام شده توسط جو:
$W_{atmosphere}=pA(z_2-z_1)$
که در آن A سطح مقطع پیستون است
رسم یک FBD پیستون در موقعیت اولیه و نهایی به دست می دهد: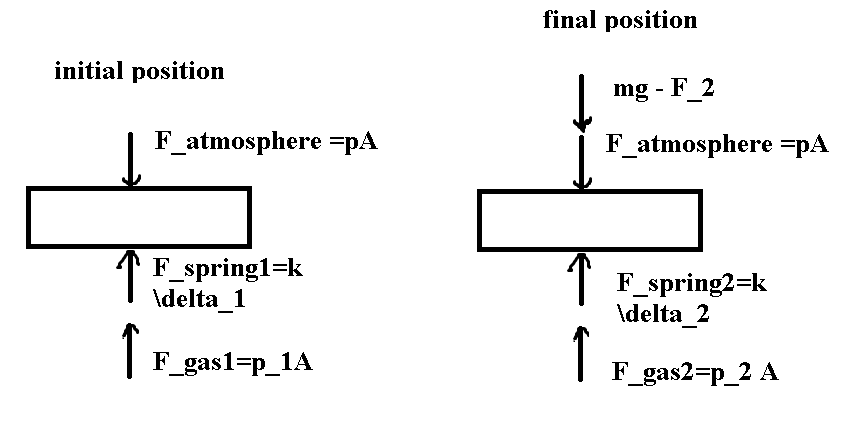
در داخل یک استوانه عمودی عایق شده از تصویر یک گاز ایده آل (κ=1,37) با حالت اولیه 0,8 بار و ϑ=20 درجه سانتیگراد و یک فنر با مشخصه خطی (ثابت فنر k=200 N/) وجود دارد. سانتی متر). از بیرون پیستون هوا با فشار 1 بار وجود دارد. در حالت تعادل، پیستون 50 سانتی متر از پایین سیلندر فاصله دارد. با استفاده از جرثقیل، وزنی معادل 10000 نیوتن بر روی پیستون قرار می گیرد، در این صورت پیستون 20 سانتی متر پایین می آید. نیروی باقیمانده در طناب جرثقیل در پایان فرآیند چقدر است؟ کار مورد نیاز برای فشرده سازی گاز چیست؟ کار مورد نیاز برای فشرده سازی اسپینگ چیست؟ چه مقدار کار توسط جو انجام شد و چه مقدار وزن با فشار دادن میله؟
سیستم شما فنر و گاز است.
وقتی قانون اول به این شکل نوشته می شود ΔU=Q−W، سپس ΔU تغییر انرژی درونی سیستم است که شامل فنر است $U_{\rm final} -U_{\rm initial})$Q گرمای ورودی به سیستم است (مثبت اگر به سیستم و منفی اگر خارج از سیستم باشد) و W کار انجام شده توسط سیستم است، (اگر کار توسط سیستم انجام شود مثبت و اگر کار روی سیستم انجام شود منفی).
بنابراین شما باید در مورد علامت(های) W(ها) تصمیم بگیرید.
موازنه نیرو روی پیستون در هر زمان در طول تراکم به صورت زیر بدست می آید:
$P_gA+F-mg-kx-P_{atm}A=0$
که در آن x جابجایی فنر به سمت بالا از طول کشیده نشده آن است. اگر این را در جابجایی دیفرانسیل (به سمت بالا) پیستون در طول فرآیند $dx=\frac{1}{A}dV$ ضرب کنیم، به دست میآید:
$P_gdV+Fdx-mgdx-kdx-P_{atm}dV=0$
ادغام این معادله بین مکان های اولیه و نهایی پیستون تسلیم می شود
$\int{P_gdV}+\int_{x_i}^{x_f}{Fdx}+mg(x_i-x_f)+\frac{k}{2}(x_i^2-x_f^2)+P_{atm}(V_i-V_f)=0$
عبارت اول نشان دهنده کاری است که گاز روی پیستون انجام می دهد، جمله دوم نشان دهنده کار انجام شده توسط نیروی F روی پیستون، جمله سوم نشان دهنده کار انجام شده توسط جرم m روی پیستون، جمله چهارم نشان دهنده کار انجام شده توسط جرم m روی پیستون است. توسط فنر روی پیستون انجام می شود و جمله پنجم نشان دهنده کار انجام شده توسط جو روی پیستون است.
گاز تحت یک فشرده سازی برگشت پذیر آدیاباتیک قرار می گیرد و کار انجام شده توسط آن را می توان به طور جداگانه با اعمال فرمول کار در فشرده سازی برگشت پذیر آدیاباتیک به دست آورد. سپس کار نیروی متغیر F را می توان با استفاده از معادله نهایی بالا به دست آورد.
حالا سوال من اینه:
اگر من تصمیم بگیرم که مرز سیستم خود را در اطراف فنر و گاز تنظیم کنم، بنابراین تنها اشیایی که در حال مطالعه هستم اسپنگ و گاز هستند، اعمال قانون اول ترمودینامیک باید این را به من بدهد:
$Q_{12}=W_{12}+\Delta U + \Delta E_{ep}$
جایی که $\Delta E_{ep}$ تغییر در انرژی پتانسیل الاستیک فنر است. چیزی که مرا آزار می دهد این است که W12 دقیقا چیست؟
کار انجام شده توسط اسپینگ در اثر نیروی فنر و تغییر شکل فنر:
$W_{spring}=-\Delta E_{ep}=-\frac{k}{2}(\delta_2-\delta_1)$
که در آن δ2 و δ1 تغییر شکل های نهایی و اولیه فنر هستند
کار انجام شده توسط گرانش روی بلوک:
$W_{gravity}=-\Delta E_{gp}=-mg(z_2-z_1)$
جایی که $\Delta E_{gp}$ تغییر انرژی پتانسیل گرانشی بلوک، z2 ارتفاع نهایی و z1 ارتفاع اولیه با استفاده از پایین استوانه به عنوان مرجع است.
کار انجام شده توسط جو:
$W_{atmosphere}=pA(z_2-z_1)$
که در آن A سطح مقطع پیستون است
رسم یک FBD پیستون در موقعیت اولیه و نهایی به دست می دهد:
در داخل یک استوانه عمودی عایق شده از تصویر یک گاز ایده آل (κ=1,37) با حالت اولیه 0,8 بار و ϑ=20 درجه سانتیگراد و یک فنر با مشخصه خطی (ثابت فنر k=200 N/) وجود دارد. سانتی متر). از بیرون پیستون هوا با فشار 1 بار وجود دارد. در حالت تعادل، پیستون 50 سانتی متر از پایین سیلندر فاصله دارد. با استفاده از جرثقیل، وزنی معادل 10000 نیوتن بر روی پیستون قرار می گیرد، در این صورت پیستون 20 سانتی متر پایین می آید. نیروی باقیمانده در طناب جرثقیل در پایان فرآیند چقدر است؟ کار مورد نیاز برای فشرده سازی گاز چیست؟ کار مورد نیاز برای فشرده سازی اسپینگ چیست؟ چه مقدار کار توسط جو انجام شد و چه مقدار وزن با فشار دادن میله؟
سیستم شما فنر و گاز است.
وقتی قانون اول به این شکل نوشته می شود ΔU=Q−W، سپس ΔU تغییر انرژی درونی سیستم است که شامل فنر است $U_{\rm final} -U_{\rm initial})$Q گرمای ورودی به سیستم است (مثبت اگر به سیستم و منفی اگر خارج از سیستم باشد) و W کار انجام شده توسط سیستم است، (اگر کار توسط سیستم انجام شود مثبت و اگر کار روی سیستم انجام شود منفی).
بنابراین شما باید در مورد علامت(های) W(ها) تصمیم بگیرید.
موازنه نیرو روی پیستون در هر زمان در طول تراکم به صورت زیر بدست می آید:
$P_gA+F-mg-kx-P_{atm}A=0$
که در آن x جابجایی فنر به سمت بالا از طول کشیده نشده آن است. اگر این را در جابجایی دیفرانسیل (به سمت بالا) پیستون در طول فرآیند $dx=\frac{1}{A}dV$ ضرب کنیم، به دست میآید:
$P_gdV+Fdx-mgdx-kdx-P_{atm}dV=0$
ادغام این معادله بین مکان های اولیه و نهایی پیستون تسلیم می شود
$\int{P_gdV}+\int_{x_i}^{x_f}{Fdx}+mg(x_i-x_f)+\frac{k}{2}(x_i^2-x_f^2)+P_{atm}(V_i-V_f)=0$
عبارت اول نشان دهنده کاری است که گاز روی پیستون انجام می دهد، جمله دوم نشان دهنده کار انجام شده توسط نیروی F روی پیستون، جمله سوم نشان دهنده کار انجام شده توسط جرم m روی پیستون، جمله چهارم نشان دهنده کار انجام شده توسط جرم m روی پیستون است. توسط فنر روی پیستون انجام می شود و جمله پنجم نشان دهنده کار انجام شده توسط جو روی پیستون است.
گاز تحت یک فشرده سازی برگشت پذیر آدیاباتیک قرار می گیرد و کار انجام شده توسط آن را می توان به طور جداگانه با اعمال فرمول کار در فشرده سازی برگشت پذیر آدیاباتیک به دست آورد. سپس کار نیروی متغیر F را می توان با استفاده از معادله نهایی بالا به دست آورد.
-
rohamavation
نام: roham hesami radرهام حسامی راد
محل اقامت: 100 مایلی شمال لندن جاده آیلستون، لستر، لسترشر. LE2
عضویت : سهشنبه ۱۳۹۹/۸/۲۰ - ۰۸:۳۴
پست: 3278-
سپاس: 5494
- جنسیت:
تماس:
Re: هوافضا
ماه تا زمانی که به نقطه 11470 مایلی (18470 کیلومتری) بالاتر از سیاره ما برسد، نزدیکتر به زمین خواهد چرخید، نقطهای که حد روشه نامیده میشود.به عبارت دیگر، اگر ماه در فاصله 9500 کیلومتری زمین قرار گیرد، گرانش زمین بر گرانشی که ماه را در کنار هم نگه می دارد، غلبه می کند. ماه از هم می پاشید و به حلقه تبدیل می شد. و سپس قطعات حلقه همچنان به دور زمین می چرخند تا زمانی که همه آنها سقوط کنند برای زمین خورشید 556,397 هستگرمایش جزر و مد و تغییر شکل جزر و مدی- چرخشی اثرات مشابهی بر شکل کلی ماه داشتند و به آن شکل لیمویی خفیف با برآمدگی در سمت رو به زمین و برآمدگی دیگری در طرف مقابل به آن دادند.نیروی جزر و مدی یک اثر گرانشی است که یک جسم را در امتداد خط به سمت مرکز جرم جسم دیگری به دلیل گرادیان (تفاوت در قدرت) در میدان گرانشی از جسم دیگر کشیده میکند. مسئول پدیده های مختلفی از جمله جزر و مد، قفل شدن جزر و مد، شکستن اجرام آسمانی و تشکیل سیستم های حلقه ای در محدوده Roche و در موارد شدید، اسپاگت کردن اجسام است. این به این دلیل به وجود می آید که میدان گرانشی اعمال شده بر روی یک جسم دیگر در سراسر قسمت های آن ثابت نیست: نزدیک ترین طرف با شدت بیشتری نسبت به دورترین طرف جذب می شود. همین تفاوت است که باعث کشیدگی جسم میشه. پس نیروی جزر و مدی به عنوان نیروی دیفرانسیل و همچنین اثر ثانویه میدان گرانشی هم میگن
در کتاب مکانیک سماوی عبارت نیروی جزر و مدی می تونه به وضعیتی داشته که در آن جسم یا ماده ای (مثلاً آب جزر و مد) عمدتاً تحت تأثیر گرانشی جسم دوم (مثلاً زمین) است، اما همچنین توسط اثرات گرانشی جسم سوم (به عنوان مثال، ماه). نیروی اغتشاش گاهی در چنین مواردی نیروی جزر و مدی میگیمTidal force (مثلاً نیروی اغتشاش بر ماه): تفاوت بین نیرویی است که جسم سوم بر جسم دوم وارد می کند و نیرویی که توسط جسم سوم وارد می شود. روی اولین هادر بسیاری از آثار هنری یا فیلمها، تصاویر یا صحنههایی وجود دارد که در آن آسمان با یک ماه عظیم (از سیاره دیده میشود) پر شده است یا برعکس. من نمی دانم که آیا در هنگام مشاهده با چشم غیر مسلح (بدون لنز تله) حد بالایی برای اندازه ظاهری وجود دارد. از آنجایی که محدودیت Roche نزدیک شدن بیش از حد اجرام آسمانی به یکدیگر را ممنوع می کند، مطمئناً محدودیتی برای اندازه ظاهری وجود دارد.
محدودیت Roche زمانی اعمال می شود که جسم نجومی مورد بحث به جای نیروهای الکترومغناطیسی، توسط گرانش کنار هم نگه داشته شود. این مورد برای اجسام با قطر بزرگتر از حدود 500 کیلومتر است. بدیهی است که برای اجسام کوچکتر، مانند انسانها، میتوانیم خودسرانه به سطح نزدیک شویم، اما من فکر میکنم این چیزی نیست که مورد سوالمه
برای قمرهای بسیار کوچکتر از سیاره ای که به دور آنها می چرخند، و با فرض اینکه ماه و سیاره چگالی تقریباً مساوی دارند، حد روشه حدود 2.44RP است، که در آن RP شعاع سیاره است.
محدودیت روشه
زاویه ای که سیاره از ماه می گیردحدود 45 درجه است. بنابراین با فرض اینکه آسمان را 180 درجه بپوشانید، در محدوده Roche، سیاره یک چهارم آسمان را پوشش می دهد (از نظر عرض، و نه کمتر از نظر مساحت!).
اگر چگالی ماه بسیار بیشتر از سیاره باشد، حد روشه کاهش می یابد و سیاره می تواند بزرگتر به نظر برسد، و به همین ترتیب اگر چگالی ماه کمتر باشد حداکثر اندازه سیاره کوچکتر می شود. با این حال، محدودیت Roche به عنوان ریشه مکعب نسبت چگالی متفاوت است، بنابراین شما نیاز به تفاوت چگالی بزرگ دارید تا تفاوت زیادی با محدودیت Roche ایجاد کنید.
پاسخ به نظر:
اگر چگالی ها را در نظر بگیرید، بیان محدودیت Roche به صورت زیر است:
$d = 2.44 R_P \left( \frac{\rho_P}{\rho_M} \right)^{1/3}$
که ρP چگالی سیاره و ρM چگالی ماه است. چگالی متوسط مشتری 1.33 کیلوگرم بر متر مکعب و چگالی متوسط ماه 3.35 کیلوگرم بر متر مکعب است و با جایگزین کردن این مقادیر، محدودیت روشه 1.79RP است. با استفاده از فرمول زاویه حدود 58 درجه بدست می آید.
شما می توانید از فرمول برای محاسبه نسبت چگالی مورد نیاز برای کاهش حد روش به RP استفاده کنید، یعنی برای تماس ماه با سطح سیاره. نسبت چگالی مورد نیاز حدود 15 است. اگر ماه از اسمیم خالص (چگال ترین عنصر) ساخته شده باشد، می توان این را برای مشتری به دست آورد، اما حداقل بعید است که در طبیعت رخ دهد.استخراج محدودیت Roche
در محاسبه حد روشه بین دو جرم آسمانی، نیروی جزر و مدی بر جرم کوچک u، Ft تقریباً به صورت بیان می شود.
$F_t=\frac{2GMur}{d^3}$
هنگام استخراج Ft، دلیل پیدا کردن تفاوت در کشش گرانشی ناشی از جسم اولیه با جرم M در مرکز ماه با جرم m و در لبه ما ه نزدیک به ماه اولیه چیست؟
$F_t=\frac{GMu}{(d-r)^2}-\frac{GMu}{d^2}$
پانلهای کناریحد روشه تعادل بین نیروهای جزر و مدی تحمیل شده بر m توسط M و خود گرانش جسم m را بیان می کند.
این تخینی از نیروی جزر و مدی است که جسم را از هم جدا می کند.
اگر تصور کنید هیچ جاذبه خود و فقط شتاب جزر و مدی وجود ندارد، مرکز ماهواره مقداری شتاب a و لبه نزدیکتر به بدنه اولیه شتاب بیشتری a+at را احساس خواهد کرد. بنابراین، لبه با شتاب در مرکز از مرکز دور میشود، مگر اینکه جاذبه خود بتواند آن را کنار هم نگه دارد. نکاتکره هیل یک جسم نجومی منطقه ای است که در آن بر جاذبه ماهواره ها تسلط دارد در حالی که حد روشه حداقل فاصله ای است که ماهواره می تواند بدون نیروی جزر و مدی که بر گرانش داخلی که ماهواره را در کنار هم نگه می دارد به بدنه اصلی خود نزدیک شود.
در کتاب مکانیک سماوی عبارت نیروی جزر و مدی می تونه به وضعیتی داشته که در آن جسم یا ماده ای (مثلاً آب جزر و مد) عمدتاً تحت تأثیر گرانشی جسم دوم (مثلاً زمین) است، اما همچنین توسط اثرات گرانشی جسم سوم (به عنوان مثال، ماه). نیروی اغتشاش گاهی در چنین مواردی نیروی جزر و مدی میگیمTidal force (مثلاً نیروی اغتشاش بر ماه): تفاوت بین نیرویی است که جسم سوم بر جسم دوم وارد می کند و نیرویی که توسط جسم سوم وارد می شود. روی اولین هادر بسیاری از آثار هنری یا فیلمها، تصاویر یا صحنههایی وجود دارد که در آن آسمان با یک ماه عظیم (از سیاره دیده میشود) پر شده است یا برعکس. من نمی دانم که آیا در هنگام مشاهده با چشم غیر مسلح (بدون لنز تله) حد بالایی برای اندازه ظاهری وجود دارد. از آنجایی که محدودیت Roche نزدیک شدن بیش از حد اجرام آسمانی به یکدیگر را ممنوع می کند، مطمئناً محدودیتی برای اندازه ظاهری وجود دارد.
محدودیت Roche زمانی اعمال می شود که جسم نجومی مورد بحث به جای نیروهای الکترومغناطیسی، توسط گرانش کنار هم نگه داشته شود. این مورد برای اجسام با قطر بزرگتر از حدود 500 کیلومتر است. بدیهی است که برای اجسام کوچکتر، مانند انسانها، میتوانیم خودسرانه به سطح نزدیک شویم، اما من فکر میکنم این چیزی نیست که مورد سوالمه
برای قمرهای بسیار کوچکتر از سیاره ای که به دور آنها می چرخند، و با فرض اینکه ماه و سیاره چگالی تقریباً مساوی دارند، حد روشه حدود 2.44RP است، که در آن RP شعاع سیاره است.
محدودیت روشه
زاویه ای که سیاره از ماه می گیردحدود 45 درجه است. بنابراین با فرض اینکه آسمان را 180 درجه بپوشانید، در محدوده Roche، سیاره یک چهارم آسمان را پوشش می دهد (از نظر عرض، و نه کمتر از نظر مساحت!).
اگر چگالی ماه بسیار بیشتر از سیاره باشد، حد روشه کاهش می یابد و سیاره می تواند بزرگتر به نظر برسد، و به همین ترتیب اگر چگالی ماه کمتر باشد حداکثر اندازه سیاره کوچکتر می شود. با این حال، محدودیت Roche به عنوان ریشه مکعب نسبت چگالی متفاوت است، بنابراین شما نیاز به تفاوت چگالی بزرگ دارید تا تفاوت زیادی با محدودیت Roche ایجاد کنید.
پاسخ به نظر:
اگر چگالی ها را در نظر بگیرید، بیان محدودیت Roche به صورت زیر است:
$d = 2.44 R_P \left( \frac{\rho_P}{\rho_M} \right)^{1/3}$
که ρP چگالی سیاره و ρM چگالی ماه است. چگالی متوسط مشتری 1.33 کیلوگرم بر متر مکعب و چگالی متوسط ماه 3.35 کیلوگرم بر متر مکعب است و با جایگزین کردن این مقادیر، محدودیت روشه 1.79RP است. با استفاده از فرمول زاویه حدود 58 درجه بدست می آید.
شما می توانید از فرمول برای محاسبه نسبت چگالی مورد نیاز برای کاهش حد روش به RP استفاده کنید، یعنی برای تماس ماه با سطح سیاره. نسبت چگالی مورد نیاز حدود 15 است. اگر ماه از اسمیم خالص (چگال ترین عنصر) ساخته شده باشد، می توان این را برای مشتری به دست آورد، اما حداقل بعید است که در طبیعت رخ دهد.استخراج محدودیت Roche
در محاسبه حد روشه بین دو جرم آسمانی، نیروی جزر و مدی بر جرم کوچک u، Ft تقریباً به صورت بیان می شود.
$F_t=\frac{2GMur}{d^3}$
هنگام استخراج Ft، دلیل پیدا کردن تفاوت در کشش گرانشی ناشی از جسم اولیه با جرم M در مرکز ماه با جرم m و در لبه ما ه نزدیک به ماه اولیه چیست؟
$F_t=\frac{GMu}{(d-r)^2}-\frac{GMu}{d^2}$
پانلهای کناریحد روشه تعادل بین نیروهای جزر و مدی تحمیل شده بر m توسط M و خود گرانش جسم m را بیان می کند.
این تخینی از نیروی جزر و مدی است که جسم را از هم جدا می کند.
اگر تصور کنید هیچ جاذبه خود و فقط شتاب جزر و مدی وجود ندارد، مرکز ماهواره مقداری شتاب a و لبه نزدیکتر به بدنه اولیه شتاب بیشتری a+at را احساس خواهد کرد. بنابراین، لبه با شتاب در مرکز از مرکز دور میشود، مگر اینکه جاذبه خود بتواند آن را کنار هم نگه دارد. نکاتکره هیل یک جسم نجومی منطقه ای است که در آن بر جاذبه ماهواره ها تسلط دارد در حالی که حد روشه حداقل فاصله ای است که ماهواره می تواند بدون نیروی جزر و مدی که بر گرانش داخلی که ماهواره را در کنار هم نگه می دارد به بدنه اصلی خود نزدیک شود.
-
rohamavation
نام: roham hesami radرهام حسامی راد
محل اقامت: 100 مایلی شمال لندن جاده آیلستون، لستر، لسترشر. LE2
عضویت : سهشنبه ۱۳۹۹/۸/۲۰ - ۰۸:۳۴
پست: 3278-
سپاس: 5494
- جنسیت:
تماس:
Re: هوافضا
این چیزهایی که از لبه انتهایی بال آویزان هستند چیست؟آنها فیتیله های ثابت هستند -- اساساً اینها سیم های کوچکی هستند که به بدنه هواپیما پیچ شده اند.
هدف آنها تخلیه الکتریسیته ساکنی است که هواپیما در حال حرکت در هوا - به ویژه در ابرها - می گیرد.
تخلیه استاتیک معمولاً در برآمدگیهای «نوکدار» هواپیما اتفاق میافتد - اگر این اتفاق از طریق آنتنها رخ میدهد، میتواند باعث تداخل رادیویی و ناوبری شود، بنابراین برای جلوگیری از نصب فتیلههای استاتیک، (Static Wick) برآمدگی کممقاومتی برای پراکنده شدن شارژ ایجاد میکند. و به عنوان یک مزیت اضافی، از بین بردن شارژ کمک می کند تا اطمینان حاصل شود که هواپیمای شما برخورد صاعقه را جذب نمی کند)اینها فیتیله های ساکن یا تخلیه کننده های ساکن هستند. آنها تجمع الکتریسیته ساکن ناشی از اصطکاک هوا را که روی سطح هواپیما جریان می یابد، از بین می برند. اصطکاک هوا تمایل دارد تا الکترونها را از اتمهایشان جدا کند، درست همانطور که مالش یک بالون انجام میدهد و باعث عدم تعادل بار الکتریکی در جسم میشود. فتیله ها با ایجاد یک سطح نوک تیز کار می کنند که در آن جریان هوا از تماس با بدنه هواپیما جدا می شود. بار اضافی تمایل به جریان در هوا دارد و از هواپیما دور می شود
بارندگی ساکن یک بار الکتریکی در هواپیما است که در اثر عبور از باران، برف، یخ یا ذرات غبار ایجاد می شود. وقتی شارژ هواپیما به اندازه کافی زیاد باشد، در هوای اطراف تخلیه می شود. ... تخلیه کننده های ساکن اگر به درستی به هواپیما چسبانده نشوند عمل نمی کنند
آیا صاعقه گیر در هواپیما وجود دارد؟
هواپیماها طوری طراحی شده اند که صدها هزار آمپر برق را تحمل کنند—الکتریسیته بسیار بیشتر از برقی که یک صاعقه می تواند تولید کند. ... اگر شواهدی از اصابت نور وجود داشته باشد، معمولاً حداقل آسیب به نوک بال یا دم وارد می شود که می تواند به عنوان صاعقه گیر عمل کند یا در علائم سوختگی ورودی و خروجی کوچک دیده می شود. تخلیهکنندههای استاتیک، که معمولاً به عنوان فتیلههای استاتیک یا فتیله تخلیه ساکن شناخته میشوند، در لبههای عقب هواپیما، از جمله ایلرونها، آسانسورها، سکان، بالها، نوک تثبیتکننده افقی و عمودی نصب میشوند. امروزه تقریباً بر روی تمام هواپیماهای غیرنظامی نصب می شود، آنها دستگاه هایی با مقاومت الکتریکی بالا (6-200 مگا اهم) با ولتاژ کرونا کمتر از ساختار هواپیمای اطراف هستند. آنها ترشحات کرونا را در جو کنترل می کنند.[1] آنها در هواپیماها استفاده می شوند تا عملکرد رضایت بخش مداوم سیستم های ناوبری و ارتباطات رادیویی را در طول شرایط بارش (p-static) فراهم کنند. بارندگی ساکن یک بار الکتریکی در هواپیما است که در اثر عبور از باران، برف، یخ یا ذرات غبار ایجاد می شود. وقتی شارژ هواپیما به اندازه کافی زیاد باشد، در هوای اطراف تخلیه می شود. بدون تخلیهکنندههای ساکن، شارژ در دستههای بزرگ از طریق انتهای نوک تیز هواپیما، مانند آنتنها، نوک بالها، تثبیتکنندههای عمودی و افقی و دیگر برآمدگیها تخلیه میشود. تخلیه یک نویز فرکانس رادیویی باند وسیع از DC تا 1000 مگاهرتز ایجاد می کند که می تواند بر ارتباطات هواپیما تأثیر بگذارد. تخلیهکنندههای استاتیک حاوی نقاط تیزتری نسبت به سایر قسمتهای هواپیما هستند و باعث میشوند که شارژ از طریق آنها تخلیه شود و این کار به تدریج انجام میشود.اصطکاک ناشی از سازه و هوا باعث تجمع بار ساکن در انتهای آن می شود که از طریق تخلیه کننده های ساکن پخش می شود.
تخلیه کننده های ساکن صاعقه گیر نیستند و بر احتمال اصابت صاعقه به هواپیما تأثیری ندارند.
تخلیه کننده های ساکن اگر به درستی به هواپیما متصل نباشند، کار نمی کنند. باید یک مسیر رسانا از تمام قسمت های هواپیما به تخلیه کننده ها وجود داشته باشد در غیر این صورت بی فایده خواهند بود. پانلهای دسترسی، درها، روکشها، چراغهای ناوبری، سختافزار نصب آنتن، سطوح کنترل و غیره، اگر نتوانند از طریق فیتیله استاتیک تخلیه شوند، میتوانند نویز ساکن ایجاد کنند.
هواپیماهای کامپوزیت چگونه از برخورد صاعقه محافظت می شوند؟
فیبر آبکاری شده با افزایش رسانایی به فیبر کربن، که مقاومت کمی دارد، محافظت در برابر صاعقه را فراهم می کند. این به رعد و برق یک مسیر رسانا می دهد تا دنبال شود. پوشش نیکل در هنگام برخورد رعد و برق تبخیر می شود، زیرا انرژی برای چنین پوشش نازکی قابل توجه است
هدف آنها تخلیه الکتریسیته ساکنی است که هواپیما در حال حرکت در هوا - به ویژه در ابرها - می گیرد.
تخلیه استاتیک معمولاً در برآمدگیهای «نوکدار» هواپیما اتفاق میافتد - اگر این اتفاق از طریق آنتنها رخ میدهد، میتواند باعث تداخل رادیویی و ناوبری شود، بنابراین برای جلوگیری از نصب فتیلههای استاتیک، (Static Wick) برآمدگی کممقاومتی برای پراکنده شدن شارژ ایجاد میکند. و به عنوان یک مزیت اضافی، از بین بردن شارژ کمک می کند تا اطمینان حاصل شود که هواپیمای شما برخورد صاعقه را جذب نمی کند)اینها فیتیله های ساکن یا تخلیه کننده های ساکن هستند. آنها تجمع الکتریسیته ساکن ناشی از اصطکاک هوا را که روی سطح هواپیما جریان می یابد، از بین می برند. اصطکاک هوا تمایل دارد تا الکترونها را از اتمهایشان جدا کند، درست همانطور که مالش یک بالون انجام میدهد و باعث عدم تعادل بار الکتریکی در جسم میشود. فتیله ها با ایجاد یک سطح نوک تیز کار می کنند که در آن جریان هوا از تماس با بدنه هواپیما جدا می شود. بار اضافی تمایل به جریان در هوا دارد و از هواپیما دور می شود
بارندگی ساکن یک بار الکتریکی در هواپیما است که در اثر عبور از باران، برف، یخ یا ذرات غبار ایجاد می شود. وقتی شارژ هواپیما به اندازه کافی زیاد باشد، در هوای اطراف تخلیه می شود. ... تخلیه کننده های ساکن اگر به درستی به هواپیما چسبانده نشوند عمل نمی کنند
آیا صاعقه گیر در هواپیما وجود دارد؟
هواپیماها طوری طراحی شده اند که صدها هزار آمپر برق را تحمل کنند—الکتریسیته بسیار بیشتر از برقی که یک صاعقه می تواند تولید کند. ... اگر شواهدی از اصابت نور وجود داشته باشد، معمولاً حداقل آسیب به نوک بال یا دم وارد می شود که می تواند به عنوان صاعقه گیر عمل کند یا در علائم سوختگی ورودی و خروجی کوچک دیده می شود. تخلیهکنندههای استاتیک، که معمولاً به عنوان فتیلههای استاتیک یا فتیله تخلیه ساکن شناخته میشوند، در لبههای عقب هواپیما، از جمله ایلرونها، آسانسورها، سکان، بالها، نوک تثبیتکننده افقی و عمودی نصب میشوند. امروزه تقریباً بر روی تمام هواپیماهای غیرنظامی نصب می شود، آنها دستگاه هایی با مقاومت الکتریکی بالا (6-200 مگا اهم) با ولتاژ کرونا کمتر از ساختار هواپیمای اطراف هستند. آنها ترشحات کرونا را در جو کنترل می کنند.[1] آنها در هواپیماها استفاده می شوند تا عملکرد رضایت بخش مداوم سیستم های ناوبری و ارتباطات رادیویی را در طول شرایط بارش (p-static) فراهم کنند. بارندگی ساکن یک بار الکتریکی در هواپیما است که در اثر عبور از باران، برف، یخ یا ذرات غبار ایجاد می شود. وقتی شارژ هواپیما به اندازه کافی زیاد باشد، در هوای اطراف تخلیه می شود. بدون تخلیهکنندههای ساکن، شارژ در دستههای بزرگ از طریق انتهای نوک تیز هواپیما، مانند آنتنها، نوک بالها، تثبیتکنندههای عمودی و افقی و دیگر برآمدگیها تخلیه میشود. تخلیه یک نویز فرکانس رادیویی باند وسیع از DC تا 1000 مگاهرتز ایجاد می کند که می تواند بر ارتباطات هواپیما تأثیر بگذارد. تخلیهکنندههای استاتیک حاوی نقاط تیزتری نسبت به سایر قسمتهای هواپیما هستند و باعث میشوند که شارژ از طریق آنها تخلیه شود و این کار به تدریج انجام میشود.اصطکاک ناشی از سازه و هوا باعث تجمع بار ساکن در انتهای آن می شود که از طریق تخلیه کننده های ساکن پخش می شود.
تخلیه کننده های ساکن صاعقه گیر نیستند و بر احتمال اصابت صاعقه به هواپیما تأثیری ندارند.
تخلیه کننده های ساکن اگر به درستی به هواپیما متصل نباشند، کار نمی کنند. باید یک مسیر رسانا از تمام قسمت های هواپیما به تخلیه کننده ها وجود داشته باشد در غیر این صورت بی فایده خواهند بود. پانلهای دسترسی، درها، روکشها، چراغهای ناوبری، سختافزار نصب آنتن، سطوح کنترل و غیره، اگر نتوانند از طریق فیتیله استاتیک تخلیه شوند، میتوانند نویز ساکن ایجاد کنند.
هواپیماهای کامپوزیت چگونه از برخورد صاعقه محافظت می شوند؟
فیبر آبکاری شده با افزایش رسانایی به فیبر کربن، که مقاومت کمی دارد، محافظت در برابر صاعقه را فراهم می کند. این به رعد و برق یک مسیر رسانا می دهد تا دنبال شود. پوشش نیکل در هنگام برخورد رعد و برق تبخیر می شود، زیرا انرژی برای چنین پوشش نازکی قابل توجه است
-
rohamavation
نام: roham hesami radرهام حسامی راد
محل اقامت: 100 مایلی شمال لندن جاده آیلستون، لستر، لسترشر. LE2
عضویت : سهشنبه ۱۳۹۹/۸/۲۰ - ۰۸:۳۴
پست: 3278-
سپاس: 5494
- جنسیت:
تماس:
Re: هوافضا
بال چگونه کار می کند؟
هر جسمی، چه کتابی باشد که روی میز نشسته باشد یا موشکی که به فضا منفجر می شود، توسط تعدادی نیرو مورد حمله قرار می گیرد. نیروی اولیه ای که اکثر ما در زندگی تجربه می کنیم وزن خودمان است، نیرویی که ما را به سطح زمین نگه می دارد. یک هواپیما در حال پرواز تحت تأثیر چهار نیروی اساسی قرار می گیرد: وزنی که هواپیما را به سمت زمین می کشد، نیروی رانشی که هواپیما را به جلو می راند، نیروی کششی یا نیروی هوا که بر خلاف حرکت هواپیما فشار می آورد و بالابری که هواپیما را به سمت بالا می کشد. .
چهار نیرویی که بر روی یک هواپیما در حال پرواز عمل می کنند
چهار نیرویی که بر روی یک هواپیما در حال پرواز عمل می کنند
این نیروی بالابر است که (در درجه اول) توسط بال تولید می شود، و من معتقدم منظور سوال کننده از پرسیدن این است که "چگونه یک بال بالابر ایجاد می کند؟" اگرچه این یک سؤال به اندازه کافی ساده به نظر می رسد، اما عموم مردم احتمالاً از این که بفهمند مهندسان و دانشمندان هنوز در مورد چگونگی تولید بالابر حتی ۱۰۰ سال پس از تحقق پرواز بحث می کنند شگفت زده می شوند. در واقع، بسیار آسان است که وارد بحث های پربار در مورد این موضوع شوید، همانطور که من در هنگام تلاش برای پاسخ به این سوال بودم. بنابراین، برای انصاف در برابر طرفداران هر نظریه، هر یک را به نوبه خود مورد بحث قرار می دهم. اما ابتدا، اجازه دهید بحث خود را کمی با در نظر گرفتن بال به عنوان یک شکل دو بعدی ساده کنیم. سطح مقطع بال را در نظر بگیرید که توسط یک هواپیما که بال را بریده است ایجاد می کند. به این شکل مقطع دو بعدی ایرفویل (یا به دوستان انگلیسی ما آئروفویل) می گویند. نمونه ای از شکل معمول ایرفویل کلارک Y است.
رایجترین توضیح مفهوم بالابر بر اساس معادله برنولی است، معادلهای که فشارها و سرعتهای اعمالشده در امتداد سطح بال را مرتبط میکند. آنچه این معادله به زبان ساده می گوید این است که مجموع فشارهای وارد بر جسم ثابت است. این مجموع از دو نوع فشار تشکیل شده است: 1) فشار استاتیک یا فشار اتمسفر در هر نقطه از یک میدان جریان و 2) فشار دینامیکی یا فشار ایجاد شده توسط حرکت جسم در هوا. از آنجایی که فشار دینامیکی تابعی از سرعت جریان است، معادله برنولی مجموع فشارها را به سرعت جریان عبوری از بدنه مرتبط می کند. بنابراین آنچه این معادله به ما می گوید این است که با افزایش سرعت، فشار کاهش می یابد و بالعکس.
برای درک اینکه چرا سرعت جریان تغییر می کند، رابطه دومی به نام معادله تداوم معرفی می کنیم. چیزی که این رابطه به ما می گوید این است که سرعت عبور جریان از یک منطقه مستقیماً با اندازه آن ناحیه مرتبط است. به عنوان مثال، اگر در نی دمید، هوا با سرعت مشخصی خارج می شود. اگر سپس با همان قدرت دمید اما اکنون انتهای نی را فشار دهید، هوا سریعتر خارج می شود.
پس چگونه این معادلات با ایرفویل دو بعدی ما ارتباط دارند؟ دوباره به کلارک Y نگاه کنید و متوجه شوید که ایرفویل یک شکل منحنی است. در حالی که پایین نسبتاً صاف است، سطح بالایی ضخیم تر و منحنی تر است. بنابراین، هنگامی که هوا از روی یک ایرفویل عبور می کند، آن جریان از بالا به ناحیه کوچکتری نسبت به جریان هوایی که از سطح زیرین می گذرد فشرده می شود. معادله پیوستگی به ما می گوید که جریان فشرده شده در یک ناحیه کوچکتر باید سریعتر حرکت کند و معادله برنولی به ما می گوید که وقتی جریانی سریعتر حرکت می کند، فشار کمتری ایجاد می کند. بنابراین، فشار بالاتری در سطح زیرین ایرفویل و فشار کمتری در سطح بالایی وجود دارد. هرگاه چنین اختلاف فشاری در طبیعت وجود داشته باشد، نیرویی در جهت فشار پایینتر ایجاد میشود (زیرا فشار به عنوان نیرو در واحد سطح تعریف میشود). به این فکر کنید که سطح بالایی به سمت بالا مکیده شده است. این نیروی رو به بالا، البته بالابر است. این تئوری است که در اکثر کتاب های درسی آیرودینامیک ظاهر می شود، البته گاهی اوقات با فرضیات نادرست اعمال شده و نتیجه گیری می شود.
نظریه نیوتنی:
نظریهای که در حال حاضر محبوبیت پیدا میکند و احتمالاً منشأ آن «بنیادیتر» است، نظریه نیوتنی است، به این دلیل که گفته میشود از قانون سوم حرکت نیوتن پیروی میکند (برای هر عمل واکنشی برابر و مخالف وجود دارد). اول، بیشتر متوجه می شوند که هر بالابر تولید ایرفویل، جریان هوای پشت خود را منحرف می کند. بالابر مثبت هوا را به سمت پایین و به سمت زمین منحرف می کند. بنابراین، حرکت هر سطح بالابری از طریق یک جریان، آن جریان را در جهت جدیدی تسریع می کند. قانون دوم نیوتن به ما می گوید که نیرو نسبت مستقیمی با شتاب دارد (F=ma). بنابراین، باید از قانون سوم نیوتن نتیجه بگیریم که نیروی شتاب دهنده هوا به سمت پایین باید با نیرویی برابر و مخالف همراه باشد که ایرفویل را به سمت بالا می راند. این نیروی رو به بالا بالابر است.
تئوری گردش خون:
ریاضی ترین توضیح برای لیفت نظریه گردش است. گردش را می توان به عنوان مولفه ای از سرعت در نظر گرفت که در اطراف یک ایرفویل یا هر شکل دیگری می چرخد یا می چرخد. در شاخه ای از آیرودینامیک به نام جریان تراکم ناپذیر، می توانیم از روابط جریان پتانسیل برای حل این گردش استفاده کنیم.
یک شکل دلخواه هنگامی که این کمیت شناخته شد، نیروی بالابر را می توان برای استفاده از قضیه کوتا-جوکوفسکی که مستقیماً به بالابر و گردش ارتباط دارد، حل کرد. این رویکرد از نظر ریاضی شدیدتر از آن چیزی است که من میخواهم به آن بپردازم، و در واقع بیشتر روشی برای محاسبه بالابر در یک میدان جریان ایدهآل است تا توضیحی درباره منشاء فیزیکی بالابر.
نتیجه:
دوستان هوپا ممکنه بپرسند کدام یک از این نظریه ها درست است؟ در حقیقت، هر کدام از جهاتی معتبر و برای کاربردهای خاص مفید هستند، اما سوال نهایی این است که اساسی ترین توضیح کدام است. ریاضیدانان مطمئناً نظریه گردش را ترجیح می دهند، که مطمئناً رویکرد بسیار ظریفی است که کاملاً مبتنی بر اصول ریاضی است، اما توضیح نمی دهد که چه نیروی طبیعت باعث ایجاد گردش یا بالابر می شود. بسیاری استدلال می کنند که توضیح نیوتنی اساسی ترین است زیرا از قوانین حرکت نیوتنی "مشتق شده" است. در حالی که این تا حدی درست است، این تئوری توضیحی در مورد اینکه چرا یک ایرفویل در وهله اول جریان را به سمت پایین منحرف می کند، وجود ندارد. حتی با پذیرفتن این اصل، این ایده که یک ایرفویل جریان را منحرف میکند و در نتیجه لیفت را تجربه میکند نیز نمیتواند ابزارهای اساسی طبیعت (فشار و اصطکاک) را که آن نیرو را ایجاد و بر بدن اعمال میکنند، جذب کند. طرفداران این توضیح عموماً نظریه برنولی را به سخره می گیرند زیرا بر مفاهیم کمتر اساسی مانند معادلات برنولی و تداوم تکیه دارد. این شکایت تا حدی حقیقت دارد، و در نتیجه ممکن است درک این نظریه برای تازه کار دشوارتر باشد. با این حال، هر دو معادله از فیزیک نیوتنی مشتق شدهاند، و من میتوانم از مقدمات اساسیتر و از نظر ریاضی درستتر از نظریه نیوتنی استدلال کنم. در پایان تصمیم گیری را به عهده خواننده می گذارم.
برنولی در مقابل نیوتن -- بحث خوب در مورد این دو رویکرد
به یاد داشته باشید که در پاسخ به این سوال فقط مقطع دوبعدی یک بال را در نظر گرفتم، ایرفویل که به آن بال بی نهایت نیز می گویند. با این حال، من به هیچ مشکلی در مورد طراحی خود ایرفویل، مانند ایرفویل های کمبر، ضخامت یا متقارن اشاره نکردم. علاوه بر این، این بحث حتی به خواص آیرودینامیکی یک بال محدود یا یک بال با نوک نیز نپرداخته است. همانطور که انتظار می رود، چنین بال ویژگی های بسیار متفاوتی با بال بی نهایت دارد. بحث در مورد بال های محدود شامل پرداختن به مفاهیمی مانند کشش القایی، گردابه های نوک، و نسبت ابعاد و همچنین مسائل طراحی بال مانند مخروطی، جارو، پیچ و تاب و دستگاه های بالابر مانند فلپ ها و لت ها است. چنین بحثی بسیار فراتر از محدوده این سؤاله
هر جسمی، چه کتابی باشد که روی میز نشسته باشد یا موشکی که به فضا منفجر می شود، توسط تعدادی نیرو مورد حمله قرار می گیرد. نیروی اولیه ای که اکثر ما در زندگی تجربه می کنیم وزن خودمان است، نیرویی که ما را به سطح زمین نگه می دارد. یک هواپیما در حال پرواز تحت تأثیر چهار نیروی اساسی قرار می گیرد: وزنی که هواپیما را به سمت زمین می کشد، نیروی رانشی که هواپیما را به جلو می راند، نیروی کششی یا نیروی هوا که بر خلاف حرکت هواپیما فشار می آورد و بالابری که هواپیما را به سمت بالا می کشد. .
چهار نیرویی که بر روی یک هواپیما در حال پرواز عمل می کنند
چهار نیرویی که بر روی یک هواپیما در حال پرواز عمل می کنند
این نیروی بالابر است که (در درجه اول) توسط بال تولید می شود، و من معتقدم منظور سوال کننده از پرسیدن این است که "چگونه یک بال بالابر ایجاد می کند؟" اگرچه این یک سؤال به اندازه کافی ساده به نظر می رسد، اما عموم مردم احتمالاً از این که بفهمند مهندسان و دانشمندان هنوز در مورد چگونگی تولید بالابر حتی ۱۰۰ سال پس از تحقق پرواز بحث می کنند شگفت زده می شوند. در واقع، بسیار آسان است که وارد بحث های پربار در مورد این موضوع شوید، همانطور که من در هنگام تلاش برای پاسخ به این سوال بودم. بنابراین، برای انصاف در برابر طرفداران هر نظریه، هر یک را به نوبه خود مورد بحث قرار می دهم. اما ابتدا، اجازه دهید بحث خود را کمی با در نظر گرفتن بال به عنوان یک شکل دو بعدی ساده کنیم. سطح مقطع بال را در نظر بگیرید که توسط یک هواپیما که بال را بریده است ایجاد می کند. به این شکل مقطع دو بعدی ایرفویل (یا به دوستان انگلیسی ما آئروفویل) می گویند. نمونه ای از شکل معمول ایرفویل کلارک Y است.
رایجترین توضیح مفهوم بالابر بر اساس معادله برنولی است، معادلهای که فشارها و سرعتهای اعمالشده در امتداد سطح بال را مرتبط میکند. آنچه این معادله به زبان ساده می گوید این است که مجموع فشارهای وارد بر جسم ثابت است. این مجموع از دو نوع فشار تشکیل شده است: 1) فشار استاتیک یا فشار اتمسفر در هر نقطه از یک میدان جریان و 2) فشار دینامیکی یا فشار ایجاد شده توسط حرکت جسم در هوا. از آنجایی که فشار دینامیکی تابعی از سرعت جریان است، معادله برنولی مجموع فشارها را به سرعت جریان عبوری از بدنه مرتبط می کند. بنابراین آنچه این معادله به ما می گوید این است که با افزایش سرعت، فشار کاهش می یابد و بالعکس.
برای درک اینکه چرا سرعت جریان تغییر می کند، رابطه دومی به نام معادله تداوم معرفی می کنیم. چیزی که این رابطه به ما می گوید این است که سرعت عبور جریان از یک منطقه مستقیماً با اندازه آن ناحیه مرتبط است. به عنوان مثال، اگر در نی دمید، هوا با سرعت مشخصی خارج می شود. اگر سپس با همان قدرت دمید اما اکنون انتهای نی را فشار دهید، هوا سریعتر خارج می شود.
پس چگونه این معادلات با ایرفویل دو بعدی ما ارتباط دارند؟ دوباره به کلارک Y نگاه کنید و متوجه شوید که ایرفویل یک شکل منحنی است. در حالی که پایین نسبتاً صاف است، سطح بالایی ضخیم تر و منحنی تر است. بنابراین، هنگامی که هوا از روی یک ایرفویل عبور می کند، آن جریان از بالا به ناحیه کوچکتری نسبت به جریان هوایی که از سطح زیرین می گذرد فشرده می شود. معادله پیوستگی به ما می گوید که جریان فشرده شده در یک ناحیه کوچکتر باید سریعتر حرکت کند و معادله برنولی به ما می گوید که وقتی جریانی سریعتر حرکت می کند، فشار کمتری ایجاد می کند. بنابراین، فشار بالاتری در سطح زیرین ایرفویل و فشار کمتری در سطح بالایی وجود دارد. هرگاه چنین اختلاف فشاری در طبیعت وجود داشته باشد، نیرویی در جهت فشار پایینتر ایجاد میشود (زیرا فشار به عنوان نیرو در واحد سطح تعریف میشود). به این فکر کنید که سطح بالایی به سمت بالا مکیده شده است. این نیروی رو به بالا، البته بالابر است. این تئوری است که در اکثر کتاب های درسی آیرودینامیک ظاهر می شود، البته گاهی اوقات با فرضیات نادرست اعمال شده و نتیجه گیری می شود.
نظریه نیوتنی:
نظریهای که در حال حاضر محبوبیت پیدا میکند و احتمالاً منشأ آن «بنیادیتر» است، نظریه نیوتنی است، به این دلیل که گفته میشود از قانون سوم حرکت نیوتن پیروی میکند (برای هر عمل واکنشی برابر و مخالف وجود دارد). اول، بیشتر متوجه می شوند که هر بالابر تولید ایرفویل، جریان هوای پشت خود را منحرف می کند. بالابر مثبت هوا را به سمت پایین و به سمت زمین منحرف می کند. بنابراین، حرکت هر سطح بالابری از طریق یک جریان، آن جریان را در جهت جدیدی تسریع می کند. قانون دوم نیوتن به ما می گوید که نیرو نسبت مستقیمی با شتاب دارد (F=ma). بنابراین، باید از قانون سوم نیوتن نتیجه بگیریم که نیروی شتاب دهنده هوا به سمت پایین باید با نیرویی برابر و مخالف همراه باشد که ایرفویل را به سمت بالا می راند. این نیروی رو به بالا بالابر است.
تئوری گردش خون:
ریاضی ترین توضیح برای لیفت نظریه گردش است. گردش را می توان به عنوان مولفه ای از سرعت در نظر گرفت که در اطراف یک ایرفویل یا هر شکل دیگری می چرخد یا می چرخد. در شاخه ای از آیرودینامیک به نام جریان تراکم ناپذیر، می توانیم از روابط جریان پتانسیل برای حل این گردش استفاده کنیم.
یک شکل دلخواه هنگامی که این کمیت شناخته شد، نیروی بالابر را می توان برای استفاده از قضیه کوتا-جوکوفسکی که مستقیماً به بالابر و گردش ارتباط دارد، حل کرد. این رویکرد از نظر ریاضی شدیدتر از آن چیزی است که من میخواهم به آن بپردازم، و در واقع بیشتر روشی برای محاسبه بالابر در یک میدان جریان ایدهآل است تا توضیحی درباره منشاء فیزیکی بالابر.
نتیجه:
دوستان هوپا ممکنه بپرسند کدام یک از این نظریه ها درست است؟ در حقیقت، هر کدام از جهاتی معتبر و برای کاربردهای خاص مفید هستند، اما سوال نهایی این است که اساسی ترین توضیح کدام است. ریاضیدانان مطمئناً نظریه گردش را ترجیح می دهند، که مطمئناً رویکرد بسیار ظریفی است که کاملاً مبتنی بر اصول ریاضی است، اما توضیح نمی دهد که چه نیروی طبیعت باعث ایجاد گردش یا بالابر می شود. بسیاری استدلال می کنند که توضیح نیوتنی اساسی ترین است زیرا از قوانین حرکت نیوتنی "مشتق شده" است. در حالی که این تا حدی درست است، این تئوری توضیحی در مورد اینکه چرا یک ایرفویل در وهله اول جریان را به سمت پایین منحرف می کند، وجود ندارد. حتی با پذیرفتن این اصل، این ایده که یک ایرفویل جریان را منحرف میکند و در نتیجه لیفت را تجربه میکند نیز نمیتواند ابزارهای اساسی طبیعت (فشار و اصطکاک) را که آن نیرو را ایجاد و بر بدن اعمال میکنند، جذب کند. طرفداران این توضیح عموماً نظریه برنولی را به سخره می گیرند زیرا بر مفاهیم کمتر اساسی مانند معادلات برنولی و تداوم تکیه دارد. این شکایت تا حدی حقیقت دارد، و در نتیجه ممکن است درک این نظریه برای تازه کار دشوارتر باشد. با این حال، هر دو معادله از فیزیک نیوتنی مشتق شدهاند، و من میتوانم از مقدمات اساسیتر و از نظر ریاضی درستتر از نظریه نیوتنی استدلال کنم. در پایان تصمیم گیری را به عهده خواننده می گذارم.
برنولی در مقابل نیوتن -- بحث خوب در مورد این دو رویکرد
به یاد داشته باشید که در پاسخ به این سوال فقط مقطع دوبعدی یک بال را در نظر گرفتم، ایرفویل که به آن بال بی نهایت نیز می گویند. با این حال، من به هیچ مشکلی در مورد طراحی خود ایرفویل، مانند ایرفویل های کمبر، ضخامت یا متقارن اشاره نکردم. علاوه بر این، این بحث حتی به خواص آیرودینامیکی یک بال محدود یا یک بال با نوک نیز نپرداخته است. همانطور که انتظار می رود، چنین بال ویژگی های بسیار متفاوتی با بال بی نهایت دارد. بحث در مورد بال های محدود شامل پرداختن به مفاهیمی مانند کشش القایی، گردابه های نوک، و نسبت ابعاد و همچنین مسائل طراحی بال مانند مخروطی، جارو، پیچ و تاب و دستگاه های بالابر مانند فلپ ها و لت ها است. چنین بحثی بسیار فراتر از محدوده این سؤاله
-
rohamavation
نام: roham hesami radرهام حسامی راد
محل اقامت: 100 مایلی شمال لندن جاده آیلستون، لستر، لسترشر. LE2
عضویت : سهشنبه ۱۳۹۹/۸/۲۰ - ۰۸:۳۴
پست: 3278-
سپاس: 5494
- جنسیت:
تماس:
Re: هوافضا
من معادلات زیر را برای بالابر و کشیدن برای ایرفویل دو بعدی به عنوان تابعی از نیروی عادی (N)، نیروی محوری (A) و زاویه حمله (a) پیدا کردم:
L=N*cos(a)-A*sin(a)
D=N*sin(a)+A*cos(a)
به عنوان مثال، من N=5000 نیوتن و A=1200 نیوتن را در نظر گرفتم و لیفت و درگ را از 90- درجه تا 90 درجه محاسبه کردم. من دریافتم که بزرگترین بالابر در حدود -10 درجه است و این که کشش به سادگی در یک خط مستقیم افزایش یافته است. این نتایج کاملاً اشتباه به نظر می رسد. آیا بزرگترین بالابر نباید در زاویه حمله مثبت باشد و آیا کشیدن نباید حداقل نزدیک به 0 درجه باشد؟ آیا من یک حذف آشکار انجام داده ام یا توضیح فیزیکی برای این رفتار وجود دارد؟
- سوال از پل
معادلاتی که پیدا کردید در رابطه با نیروی برا و درگ به نیروی عادی و نیروی محوری دقیق هستند. اکثر مهندسان هوافضا و علاقه مندان به هوانوردی با اصطلاحات لیفت و درگ آشنا هستند. نیروی نرمال و نیروی محوری مقادیر مرتبطی هستند که با استفاده از یک سیستم مرجع متفاوت اندازه گیری می شوند. با مطالعه نمودار زیر می توان تفاوت بین دو مجموعه متغیر را بهتر درک کرد.
تفاوت بین لیفت (L) و درگ (D) در مقابل نیروی نرمال (N) و نیروی محوری (A)
تفاوت بین لیفت (L) و درگ (D) در مقابل نیروی نرمال (N) و نیروی محوری (A)
این شکل نشان می دهد که چگونه نیروهای بالابر و درگ روی یک ایرفویل دو بعدی عمل می کنند. شکل ایرفویل با سرعت V∞ حرکت می کند و با زاویه حمله α با جریان هوای ورودی برخورد می کند. نیروی بالابر به صورت عمود بر بردار سرعت تعریف می شود در حالی که درگ به صورت موازی با آن تعریف می شود. مهم نیست که زاویه حمله چیست، بلند کردن و کشیدن همیشه همین جهت را نسبت به سرعت حفظ می کند.
با این حال، نمودار همچنین دو متغیر جدید به نام های N برای نیروی عادی و A برای نیروی محوری معرفی می کند. این دو کمیت با توجه به سرعت اندازه گیری نمی شوند، بلکه با توجه به هندسه خود ایرفویل اندازه گیری می شوند. در مورد ایرفویل دو بعدی مانند آنچه در اینجا نشان داده شده است، پارامتر هندسی کلیدی خط وتر است. خط وتر به عنوان یک خط مستقیم از لبه جلو تا لبه انتهایی ایرفویل تعریف می شود. همانند لیفت و درگ، نیروی عادی و نیروی محوری به ترتیب عمود و موازی با خط وتر تعریف می شوند.
قبلاً دیدهایم که بلند کردن و کشیدن همیشه یک جهت را نسبت به سرعت حفظ میکنند بدون توجه به زاویه حمله. با این حال، جهت گیری بین این دو نیرو و خط وتر ایرفویل تغییر می کند. برعکس برای نیروهای عادی و محوری صادق است. با تغییر زاویه حمله، نیروهای عادی و محوری نسبت به سرعت جهت گیری را تغییر می دهند، اما این دو بردار همیشه جهت گیری یکسانی را نسبت به جسم حفظ می کنند.
این ما را به معادلاتی که ذکر کردید می رساند. کمیت های لیفت، کشش، نیروی نرمال و نیروی محوری همگی با مثلثات ساده مرتبط هستند. اگر مقادیر یک سیستم مرجع را بدانیم، می توانیم به راحتی با استفاده از معادلات زیر به سیستم دیگر تبدیل کنیم.
اگر نیروی نرمال (N) و نیروی محوری (A) را می دانید، برآمدگی (L) و کشیدن (D) را محاسبه کنید:
اگر لیفت (L) و کشیدن (D) را می دانید، نیروی نرمال (N) و نیروی محوری (A) را محاسبه کنید:
تا به حال، ما فقط در مورد نیروهای واقعی L، D، N و A صحبت کردهایم. این مقادیر را میتوان در واحدهای نیرو مانند پوند یا نیوتن اندازهگیری کرد. با این حال، در بحثهای قبلی دیدهایم که مهندسان اغلب این نیروها را به ضرایب غیر بعدی مانند CL برای بالابر و CD برای درگ تبدیل میکنند تا مقایسهها آسانتر شود. ضرایب مشابهی برای نیروی نرمال (CN) و نیروی محوری (CA) نیز وجود دارد. به دلایلی که به زودی مشخص خواهد شد، ما در ادامه این مقاله از این ضرایب استفاده خواهیم کرد.
همانطور که در بالا توضیح داده شد، معادلاتی که کشف کردید واقعا درست هستند، اما پاسخ هایی که هنگام اعمال آنها محاسبه کردید درست نیستند. خطا در تحلیل ساده شما این است که مقادیری را برای N و A فرض کرده اید که با زاویه حمله ثابت هستند. در واقع، این مقادیر مشابه نحوه تغییر L و D با α متفاوت خواهند بود. شما ریاضیات معادلات را به درستی اعمال کردید اما ورودی های اشتباهی را برای متغیرها فرض کردید. برای نشان دادن بهتر روابط بین این دو مجموعه از نیروهای آیرودینامیکی، به مثال واقعی تری نیاز داریم.
به جای اعداد، می توانیم از مثال ارائه شده در مقاله قبلی در مورد رفتار آیرودینامیکی ایرفویل ها در زاویه حمله بالا استفاده کنیم. در آن پاسخ، ما دو نمودار را معرفی کردیم که نشان میدهد چگونه ضرایب بالابر و درگ برای یک ایرفویل دو بعدی معمولی در زوایای حمله از 0 تا 180 درجه تغییر میکند. تعدادی از مقادیر ارائه شده در این نمودارها استخراج شده و در جدول زیر آمده است. جدول همچنین ضرایب نیروی نرمال و محوری مربوطه را نشان می دهد که با استفاده از معادلات ارائه شده قبلی تبدیل شده اند. شما می توانید خودتان از این مقادیر برای تبدیل به عقب و جلو استفاده کنید و مطمئن شوید که نحوه محاسبه هر چهار متغیر را درک می کنید.
Alpha Lift (CL) Drag (CD) Normal (CN) Axial (CA)
[درجه] [-] [-] [-] [-]
====================================================
0 0.0000 0.0000 0.0000 0.0000
10 0.8628 0.0209 0.8533 -0.1293
15 1.0314 0.0577 1.0112 -0.2112
17 0.5802 0.2164 0.6181 0.0373
23 0.5752 0.3378 0.6615 0.0862
33 0.8826 0.6971 1.1199 0.1039
45 0.9620 1.0828 1.4459 0.0854
55 0.8579 1.4210 1.6561 0.1123
70 0.5603 1.6585 1.7501 0.0407
80 0.3273 1.8010 1.8305 -0.0096
90 0.0744 1.8377 1.8377 -0.0744
100 -0.1835 1.7581 1.7632 -0.1246
110 -0.4265 1.6362 1.6834 -0.1589
120 -0.6298 1.5037 1.6171 -0.2065
130 -0.8132 1.2601 1.4880 -0.1870
140 -0.8975 0.9425 1.2934 -0.1451
150 -0.7041 0.6038 0.9117 -0.1708
160 -0.5802 0.3126 0.6521 -0.0953
170 -0.8132 0.1325 0.8239 0.0107
180 0.0000 0.0000 0.0000 0.0000
نمودارهای زیر برآمدگی را در مقابل نیروی نرمال و درگ در برابر نیروی محوری را برای داده های داده شده در جدول مقایسه می کنند. این مثال مقایسه خوبی از شباهت ها و تفاوت های بین دو مجموعه نیروهای آیرودینامیکی ارائه می دهد.
مقایسه ضرایب نیروی بالابر و نرمال
مقایسه ضرایب نیروی بالابر و نرمال
مقایسه ضرایب نیروی پسا و محوری
مقایسه ضرایب نیروی پسا و محوری
به روند این نمودارها توجه کنید. به عنوان مثال، نیروی بالابر و نرمال برای زوایای کوچک نزدیک به 0 درجه تقریباً یکسان هستند، اما سپس رشد کاملاً متفاوتی دارند. نیروی نرمال در 90 درجه به حداکثر می رسد اما بالابر صفر است. در همین حال، درگ نیز در 90 درجه به حداکثر می رسد اما نیروی محوری صفر است. این رفتار از نظر فیزیکی منطقی است زیرا در 90 درجه، خط وتر عمود بر سرعت است. به عبارت دیگر، دو سیستم مرجع به گونه ای در یک راستا قرار دارند که نیروی نرمال و نیروی کشش روی هم قرار می گیرند. علاوه بر این، ایرفویل چیزی بیش از یک صفحه صاف در این زاویه شدید نیست، به طوری که هیچ نیروی بالابری (یا نیروی محوری) ایجاد نمی کند، اما بیشترین نیروی پسا (و نیروی عادی) ممکن را ایجاد می کند. از نظر ریاضی، ما باید بر اساس رفتار توابع سینوس و کسینوس در معادلات تبدیل که قبلاً بحث شد، انتظار این وضعیت را داشته باشیم.
من می خواهم فرمول محاسبه بالابر تولید شده توسط بال هواپیما یا روتور هلیکوپتر را بدانم (اصطلاحات را تا حد امکان درک کنید).
آیا راهی برای محاسبه دینامیکی ضریب بالابر وجود دارد؟ من در جایی از فرمولی برای بال های کوچک خمیده خواندم...
آیا راهی برای تخمین ضریب درگ با استفاده از تئوری Thin Airfoil وجود دارد؟ من می دانم که ضریب لیفت به صورت 2*pi*alpha تخمین زده می شود، اما آیا نظریه Thin Airfoil حتی مقداری را برای ضریب درگ پیش بینی می کند؟
L=N*cos(a)-A*sin(a)
D=N*sin(a)+A*cos(a)
به عنوان مثال، من N=5000 نیوتن و A=1200 نیوتن را در نظر گرفتم و لیفت و درگ را از 90- درجه تا 90 درجه محاسبه کردم. من دریافتم که بزرگترین بالابر در حدود -10 درجه است و این که کشش به سادگی در یک خط مستقیم افزایش یافته است. این نتایج کاملاً اشتباه به نظر می رسد. آیا بزرگترین بالابر نباید در زاویه حمله مثبت باشد و آیا کشیدن نباید حداقل نزدیک به 0 درجه باشد؟ آیا من یک حذف آشکار انجام داده ام یا توضیح فیزیکی برای این رفتار وجود دارد؟
- سوال از پل
معادلاتی که پیدا کردید در رابطه با نیروی برا و درگ به نیروی عادی و نیروی محوری دقیق هستند. اکثر مهندسان هوافضا و علاقه مندان به هوانوردی با اصطلاحات لیفت و درگ آشنا هستند. نیروی نرمال و نیروی محوری مقادیر مرتبطی هستند که با استفاده از یک سیستم مرجع متفاوت اندازه گیری می شوند. با مطالعه نمودار زیر می توان تفاوت بین دو مجموعه متغیر را بهتر درک کرد.
تفاوت بین لیفت (L) و درگ (D) در مقابل نیروی نرمال (N) و نیروی محوری (A)
تفاوت بین لیفت (L) و درگ (D) در مقابل نیروی نرمال (N) و نیروی محوری (A)
این شکل نشان می دهد که چگونه نیروهای بالابر و درگ روی یک ایرفویل دو بعدی عمل می کنند. شکل ایرفویل با سرعت V∞ حرکت می کند و با زاویه حمله α با جریان هوای ورودی برخورد می کند. نیروی بالابر به صورت عمود بر بردار سرعت تعریف می شود در حالی که درگ به صورت موازی با آن تعریف می شود. مهم نیست که زاویه حمله چیست، بلند کردن و کشیدن همیشه همین جهت را نسبت به سرعت حفظ می کند.
با این حال، نمودار همچنین دو متغیر جدید به نام های N برای نیروی عادی و A برای نیروی محوری معرفی می کند. این دو کمیت با توجه به سرعت اندازه گیری نمی شوند، بلکه با توجه به هندسه خود ایرفویل اندازه گیری می شوند. در مورد ایرفویل دو بعدی مانند آنچه در اینجا نشان داده شده است، پارامتر هندسی کلیدی خط وتر است. خط وتر به عنوان یک خط مستقیم از لبه جلو تا لبه انتهایی ایرفویل تعریف می شود. همانند لیفت و درگ، نیروی عادی و نیروی محوری به ترتیب عمود و موازی با خط وتر تعریف می شوند.
قبلاً دیدهایم که بلند کردن و کشیدن همیشه یک جهت را نسبت به سرعت حفظ میکنند بدون توجه به زاویه حمله. با این حال، جهت گیری بین این دو نیرو و خط وتر ایرفویل تغییر می کند. برعکس برای نیروهای عادی و محوری صادق است. با تغییر زاویه حمله، نیروهای عادی و محوری نسبت به سرعت جهت گیری را تغییر می دهند، اما این دو بردار همیشه جهت گیری یکسانی را نسبت به جسم حفظ می کنند.
این ما را به معادلاتی که ذکر کردید می رساند. کمیت های لیفت، کشش، نیروی نرمال و نیروی محوری همگی با مثلثات ساده مرتبط هستند. اگر مقادیر یک سیستم مرجع را بدانیم، می توانیم به راحتی با استفاده از معادلات زیر به سیستم دیگر تبدیل کنیم.
اگر نیروی نرمال (N) و نیروی محوری (A) را می دانید، برآمدگی (L) و کشیدن (D) را محاسبه کنید:
اگر لیفت (L) و کشیدن (D) را می دانید، نیروی نرمال (N) و نیروی محوری (A) را محاسبه کنید:
تا به حال، ما فقط در مورد نیروهای واقعی L، D، N و A صحبت کردهایم. این مقادیر را میتوان در واحدهای نیرو مانند پوند یا نیوتن اندازهگیری کرد. با این حال، در بحثهای قبلی دیدهایم که مهندسان اغلب این نیروها را به ضرایب غیر بعدی مانند CL برای بالابر و CD برای درگ تبدیل میکنند تا مقایسهها آسانتر شود. ضرایب مشابهی برای نیروی نرمال (CN) و نیروی محوری (CA) نیز وجود دارد. به دلایلی که به زودی مشخص خواهد شد، ما در ادامه این مقاله از این ضرایب استفاده خواهیم کرد.
همانطور که در بالا توضیح داده شد، معادلاتی که کشف کردید واقعا درست هستند، اما پاسخ هایی که هنگام اعمال آنها محاسبه کردید درست نیستند. خطا در تحلیل ساده شما این است که مقادیری را برای N و A فرض کرده اید که با زاویه حمله ثابت هستند. در واقع، این مقادیر مشابه نحوه تغییر L و D با α متفاوت خواهند بود. شما ریاضیات معادلات را به درستی اعمال کردید اما ورودی های اشتباهی را برای متغیرها فرض کردید. برای نشان دادن بهتر روابط بین این دو مجموعه از نیروهای آیرودینامیکی، به مثال واقعی تری نیاز داریم.
به جای اعداد، می توانیم از مثال ارائه شده در مقاله قبلی در مورد رفتار آیرودینامیکی ایرفویل ها در زاویه حمله بالا استفاده کنیم. در آن پاسخ، ما دو نمودار را معرفی کردیم که نشان میدهد چگونه ضرایب بالابر و درگ برای یک ایرفویل دو بعدی معمولی در زوایای حمله از 0 تا 180 درجه تغییر میکند. تعدادی از مقادیر ارائه شده در این نمودارها استخراج شده و در جدول زیر آمده است. جدول همچنین ضرایب نیروی نرمال و محوری مربوطه را نشان می دهد که با استفاده از معادلات ارائه شده قبلی تبدیل شده اند. شما می توانید خودتان از این مقادیر برای تبدیل به عقب و جلو استفاده کنید و مطمئن شوید که نحوه محاسبه هر چهار متغیر را درک می کنید.
Alpha Lift (CL) Drag (CD) Normal (CN) Axial (CA)
[درجه] [-] [-] [-] [-]
====================================================
0 0.0000 0.0000 0.0000 0.0000
10 0.8628 0.0209 0.8533 -0.1293
15 1.0314 0.0577 1.0112 -0.2112
17 0.5802 0.2164 0.6181 0.0373
23 0.5752 0.3378 0.6615 0.0862
33 0.8826 0.6971 1.1199 0.1039
45 0.9620 1.0828 1.4459 0.0854
55 0.8579 1.4210 1.6561 0.1123
70 0.5603 1.6585 1.7501 0.0407
80 0.3273 1.8010 1.8305 -0.0096
90 0.0744 1.8377 1.8377 -0.0744
100 -0.1835 1.7581 1.7632 -0.1246
110 -0.4265 1.6362 1.6834 -0.1589
120 -0.6298 1.5037 1.6171 -0.2065
130 -0.8132 1.2601 1.4880 -0.1870
140 -0.8975 0.9425 1.2934 -0.1451
150 -0.7041 0.6038 0.9117 -0.1708
160 -0.5802 0.3126 0.6521 -0.0953
170 -0.8132 0.1325 0.8239 0.0107
180 0.0000 0.0000 0.0000 0.0000
نمودارهای زیر برآمدگی را در مقابل نیروی نرمال و درگ در برابر نیروی محوری را برای داده های داده شده در جدول مقایسه می کنند. این مثال مقایسه خوبی از شباهت ها و تفاوت های بین دو مجموعه نیروهای آیرودینامیکی ارائه می دهد.
مقایسه ضرایب نیروی بالابر و نرمال
مقایسه ضرایب نیروی بالابر و نرمال
مقایسه ضرایب نیروی پسا و محوری
مقایسه ضرایب نیروی پسا و محوری
به روند این نمودارها توجه کنید. به عنوان مثال، نیروی بالابر و نرمال برای زوایای کوچک نزدیک به 0 درجه تقریباً یکسان هستند، اما سپس رشد کاملاً متفاوتی دارند. نیروی نرمال در 90 درجه به حداکثر می رسد اما بالابر صفر است. در همین حال، درگ نیز در 90 درجه به حداکثر می رسد اما نیروی محوری صفر است. این رفتار از نظر فیزیکی منطقی است زیرا در 90 درجه، خط وتر عمود بر سرعت است. به عبارت دیگر، دو سیستم مرجع به گونه ای در یک راستا قرار دارند که نیروی نرمال و نیروی کشش روی هم قرار می گیرند. علاوه بر این، ایرفویل چیزی بیش از یک صفحه صاف در این زاویه شدید نیست، به طوری که هیچ نیروی بالابری (یا نیروی محوری) ایجاد نمی کند، اما بیشترین نیروی پسا (و نیروی عادی) ممکن را ایجاد می کند. از نظر ریاضی، ما باید بر اساس رفتار توابع سینوس و کسینوس در معادلات تبدیل که قبلاً بحث شد، انتظار این وضعیت را داشته باشیم.
من می خواهم فرمول محاسبه بالابر تولید شده توسط بال هواپیما یا روتور هلیکوپتر را بدانم (اصطلاحات را تا حد امکان درک کنید).
آیا راهی برای محاسبه دینامیکی ضریب بالابر وجود دارد؟ من در جایی از فرمولی برای بال های کوچک خمیده خواندم...
آیا راهی برای تخمین ضریب درگ با استفاده از تئوری Thin Airfoil وجود دارد؟ من می دانم که ضریب لیفت به صورت 2*pi*alpha تخمین زده می شود، اما آیا نظریه Thin Airfoil حتی مقداری را برای ضریب درگ پیش بینی می کند؟
-
rohamavation
نام: roham hesami radرهام حسامی راد
محل اقامت: 100 مایلی شمال لندن جاده آیلستون، لستر، لسترشر. LE2
عضویت : سهشنبه ۱۳۹۹/۸/۲۰ - ۰۸:۳۴
پست: 3278-
سپاس: 5494
- جنسیت:
تماس:
Re: هوافضا
قبل اون بگم اجزای اصلی هواپیما چه هستند؟
سازه هواپیما
قسمت های اصلی هواپیما:
1 :بدنه(fuselage)
2 :بال(wing)
3 :دم (tail)( Empennage)
بدنه هواپیما :
بدنه هواپیما قسمت اعظم ساختمان هواپیما را تشکیل می دهد و محلی مناسب برای جا سازی نصب و نگهداری بسیاری از دستگاه ها و قطعات هواپیما می باشد .
قسمت های اصلی هواپیما:
1 :بدنه(fuselage)
2 :بال(wing)
3 :دم (tail)( Empennage)
بدنه هواپیما :
بدنه هواپیما قسمت اعظم ساختمان هواپیما را تشکیل می دهد و محلی مناسب برای جا سازی نصب و نگهداری بسیاری از دستگاه ها و قطعات هواپیما می باشد . بسته به نوع هواپیما (مسافربری- باربری-شکاری-سوخت رسان...) کابین خلبان و خدمه پروازی- کابین مسافران مخازن سوخت- بار – مهمات و غیره در داخل بدنه هواپیما طراحی و قرار داده می شود.
بدنه هواپیما از دو قسمت اساسی تشکیل می شود:
1-استخوان بندی یا اسکلت(structure) که شکلهای گوناگون طراحی و ساخته می شود.
2 –پوسته بدنه(skin) که عبارتند از چندین صفحه فلزی صاف به نام (panel) که غالبا از جنس آلیاژ آلومینیوم های ضد زنگ می باشند و در نقاط مختلف بدنه هواپیما بر حسب فشار ناشی از پرواز- تحمل بار و سنگینی ضخامت آنها متفاوت می شود.
علاوه بر دو قسمت فوق صفحات فلزی دیگری در بدنه هواپیما بکار گرفته می شود این صفحات را تیزه گیر (fairing) و یا مغزی (fillet) می گویند که دارای سطحی صاف و هموار و قوسی شکل می باشند و محل اتصالات نظیر محل اتصال بال ها ،دم هواپیما، موتور ها به بدنه را که دارای زاویه خواهند بود می پوشاند و از ایجاد نیروی پسا drag در محل های اتصال جلوگیری می نمایند.
-انواع بدنه
نمای اصلی کلی هر هواپیما ناشی از نوع استخوان بندی بخصوصی است که برای آن هواپیما مدنظر گرفته می شود بدنه هواپیما (fuselage) بر چهار نوع است:
-داربستی : (truss)
-وارن تراس(warren truss)
-تخم مرغی (mono coque)
-نیمه تخمه مرغی (semi-mono coque)
بدنه هواپیما از نوع داربستی :از این نوع ساختمان بدنه امروزه تنها در ساخت هواپیما های کوچک استفاده می شود به طور کلی این بدنه دارای چهار پایه اصلی langeron است که بوسیله چند تیرک عمودی vertical و گاهی میله های فلزی rodsبه یکدیگر وصل شده اند در استخوان بندی داربستی فشار وارده بر هواپیما بیشتر توسط همین داربست تحمل می شود. این داربست مجموعه ای از تیرکها، میله ها، لوله ها و سیمها که بعنوان شاسی بدنه عمل می نماید.
بدنه از نوع وارن تراس :
مهمترین نوع اسکلت بندی وارن تراس می باشد. در این نوع اسکلت کلیه اجزای تراس به صورت مثلثی بهم وصل شده و چهار چوب آن تماما جو شکاری می شود بزرگترین مزیت این نوع اسکلت بندی این است که اجزای متشکله فقط در معرض نیروی کششی و فشار قرار می گیرند ولی نیروی خمش در آن هیچ تاثیری ندارد.
بدنه از نوع تخم مرغی :
این بدنه در حقیقت مانند یک پوسته هواپیما را در بر می گیرد و از آلومینیوم یا آلیاژی از این نوع بدنه بدون تقویت اجزا آن فشار وارده بر هواپیما را تحمل می نماید.
بدنه از نوع نیمه تخمه مرغی :
اکثر هواپیما های مدرن کنونی دارای این نوع ساختمان بدنه می باشند این نوع ساختمان از محفظه ای تو خالی با پوشش فلزی درست شده است که در داخل آن قالب های former بیضی شکل یا دایره ای و بعضی از اوقات چهارگوش قرار دارد که به وسیله تیغه هایی به نام
bulk head حلقه ها rings را به هم متصل کرده و تقویت شده اند در این نوع ساختمان فشار ها آئرودینامیکی بطور متناسب و یکنواخت بین پوسته خارجی بدنه و اسکلت تقسیم گردیده و در برابر فشار های پیچشی بسیار مقاوم است.
بالها :
اساسی ترین قسمت هواپیما در تأمین نیروی lifting force که باعث بلند شدن هواپیما از زمین و اوج گرفتن آن می شود بالها می باشند.بالها وزن کلی هواپیما را در پرواز نموده و قسمت اعظم فشار ها و تکانهای شدید بر هواپیما ضمن پرواز را خنثی می نمایند در بعضی از هواپیما ها بال دو قسمت دارد :
بال راست و بال چپ و در تعدادی دیگر بال از سه قسمت بال راست و بال چپ و بال مرکزی center wingتشکیل می شود.
بال های هواپیما از نظر پوشش دارای دو نوع پوشش زیر می باشند :
1: بال با پوشش پارچه ای(wood and clothe wing)
2: بال با پوشش ورقه فلزی (stress skin wing)
طبقه بندی هواپیما برحسب شکل بالها(by shape):
بال ذوزنقه ای- بال ذوزنقه ای معکوس –بال مستطیلی یا صلیبی –بال لوزی شکل –بال مثلثی یا دلتا –بال پیکانی شکل
دم هواپیما :
کلیه قسمت های عقب یا انتهای بدنه هواپیما به اضافه یک یا چند سکان عمودی یا افقی را دم tail می گویند.
کار سکان های افقی و عمودی یا در حقیقت وظیفه ی قسمت دم هواپیما ایجاد تعادل و ثبات هواپیما در پرواز و کمک در هدایت آن به سمت های راست ،چپ،پایین و بالا می باشد.
سکان افقی(horizontal, stabilizer)
در بعضی از هواپیما ها ممکن است سکان افقی بوده و بتواند دور محور طولی خود بچرخد و بدین نحو تعادل هواپیما را حول محور عرضی آن تامین نماید سکان افقی به انتها ی بدنه و هم روی سکان عمودی سوار می کنند.
سکان عمودی (vertical stabilizer) :
این سکان به طور عمودی به انتها ی بدنه و بین دو سکان افقی چپ و راست قرار دارد. وظیفه اصلی این سطح ایجاد حفظ تعادل عرضی هواپیما در پرواز و جلوگیری از انحراف ناخواسته به چپ و راست بوده و تعادل هواپیما را حول محور عمودی تامین می کند موتور ها و ملخ هواپیما ایجاد گشتاور torque پیچشی نمایند که به وسیله سکّان عمودی خنثی شده و هواپیما متعادل می گردد.
از نظر نوع بال ، بطور کلی دو نوع هواپیما وجود دارد:
هواپیماهای با بال ثابت (Fixed wing Aircraft)
هواپیماهای با بال چرخنده (Rotary wing Aircraft)
نوع اول هواپیما و به نوع دوم هلیکوپتر یا چرخبال نام دارد. هواپیماها عموما دارای بال ثابت هستند و در طول پرواز بال نمیچرخد. ولی هلیکوپتر ، هواپیمائی است که بالش در حال پرواز به دور یک محور میچرخد.
انواع هواپیما از نظر دارا بودن سرنشین
از نظر دارا بودن سرنشین ، هواپیماها به دو گونه کلی تقسیم میگردند:
هواپیماهای با سرنشین (Manned Aircraft)
هواپیماهای بدون سرنشین (Unmanned Aircraft)
هواپیماهای بدون سرنشین شامل موشک هدایت شونده ( Missile ) ، موشک هدایت نشونده ( Rocket ) ، هواپیماهای کنترل از راه دور ( RPV یا Remote Piloted Vehicle ) و غیره میباشند.
انواع هواپیما از نظر چگالی
از نظر جرم حجمی هواپیماها به دو دسته کلی تقسیم میشوند:
هواپیماهای سنگینتر از آزمایشهای مربوط به هوا (Heavier than Air Aircraft)
هواپیماهای سبکتر از آزمایشهای مربوط به هوا (Lighter than Air Aircraft)
نوع دوم شامل بالن (Balloon) ، کشتی هوائی (Air ship) و مانند اینهاست.
Sligo-plane-landing
انواع هواپیمای مانوری
از نظر قدرت مانوری ، هواپیماها به چهار نوع مختلف تقسیم میکردند:
هواپیماهای غیر مانوری (Normal (Non - Aerobatic) Aircraft)
هواپیماهای نیمه مانوری (Utility (Semi - Aerobatic) Aircraft)
هواپیماهای مانوری (Aerobatic Aircraft)
هواپیماهای بسیار مانوری (High Maneuverability Aircraft)
مرکز تولید نیرو (Powerplant)
بدنه (Fuselage)
بال (Wing)
دم (Empennage)
ارابه فرود (Landing gear)مجموعه دم هواپیما (Empennage) نیز بخش اصلی دیگری از هواپیما است. دم هواپیما از قسمت های ثابت و متحرک مختلفی تشکیل شده است. پایدارکننده عمودی، پایدارکننده افقی و سطوح متحرکی مانند سکان و بالابرندهها از آن جمله هستند.
پایدارکنندهها (Stabilizer): کار پایدارکننده ایجاد پایداری چه در جهت افقی و چه در جهت عمودی است.
پایدارکننده عمودی (Vertical stabilizer): دماغه هواپیما را از تاب خوردن به چپ و راست (yaw) بازمیدارد. اما در صورت نیاز، خلبان با کمک همین بخش میتواند هواپیما را به سمت چپ یا راست متمایل کند (تصویر ۵).
سکان هواپیما (Rudder): سکان هواپیما قسمت متحرکی از پایدارکننده عمودی است که کمک میکند هواپیما وضعیت جاری دماغه خود را حفظ کند. سکان نه برای تغییر جهت هواپیما، بلکه برای پایدار نگاه داشتن هواپیما هنگام تغییر جهت به کار میرود. هواپیما برای تغییر جهت دادن بالهای خود را با زاویه خاصی که به منحنی گردش به چپ و راست بستگی دارد، خم میکند.
پایدارکننده افقی (Horizontal stabilizer): دماغه هواپیما را از تاب خوردن در جهت بالا و پایین (pitch) بازمیدارد. اما در صورت نیاز، خلبان با کمک همین بخش میتواند هواپیما را به سمت چپ یا راست متمایل کند (تصویر ۶).
بالابرندهها (Elevator): بالابرندهها هواپیما را در فراز و فرودهایش (حرکت دماغه به بالا یا پایین) پایدار نگاه میدارند و نیز به تغییر زاویه حمله هواپیما کمک میکنند. وقتی بالابرنده بالا میرود، نیروی پایینبرنده افزایش مییابد و دم را به سمت پایین میکشد و دماغه را بالا میبرد. وقتی بالابرنده پایین بیاید، نیروی پایینبرنده در دم هواپیما کاهش مییابد و سبب میشود دم بالا برود و دماغه هواپیما پایینتر بیاید.
اجزای هواپیما
. نقش پایدارکننده عمودی (Vertical stabilizer) در تغییر جهت هواپیما به چپ یا راست
اجزای هواپیما
. نقش پایدارکننده افقی (Horizontal stabilizer) در تغییر جهت دماغه هواپیما به بالا یا پایین
ارابه فرود هواپیما
از دیگر اجزای اصلی هواپیما، ارابه فرود است. ارابه فرود بخشی است که اجازه میدهد هواپیما پس از پایان پرواز مجددا بر زمین بنشیند. ضمنا ارابه فرود مهمترین تکیهگاه هواپیما هنگام توقف، حرکت روی باند، برخاستن از زمین و نیز هنگام فرود است. ارابه فرود اغلب شامل چرخ است اما برخی از هواگردها مثل هواپیماهای آبنشین بهجای چرخ، ارابه فرود شناور (float) و هواپیماهای برفنشین بخشی مانند چوب اسکی دارند.
ارابه فرود بسیاری از هواپیماها از سه مجموعه چرخ اصلی تشکیل شده است: دو مجموعه چرخ در دو سمت هواپیما (معمولا زیر بالها) و یک چرخ در جلو یا عقب هواپیما. تکچرخ عقب یا جلو هواپیما هدایتپذیر است و خلبان میتواند با کمک آن هواپیما را روی زمین در جهتهای مختلف هدایت کند و راه ببرد.
قسمتهای اصلی ساختاری بال عبارتند از: اسپارها ، دنده ها و تارها. اجزای بال. اینها با خرپاها ، تیرهای I ، لوله ها یا سایر وسایل ، از جمله پوست تقویت می شوند. ... لبه های بال متصل به عقب ، یا عقب ، دو نوع سطح کنترل هستند که به آنها آیلرون و فلپ گفته می شود.بالهای هواپیما برای پرواز از طریق بالابر بسیار مهم هستند ، اما قسمتهای زیادی از بال را برای کنترل مقدار و جهت بالابر در اختیار دارند.
ایلرونز. ...
فلپ ها ...
وینگلت ...
اسلات ها ...
اسپویلر
که فلپ وانواع آنفلاپ (Flap): اگر هنگام پرواز با هواپیما کنار پنجره نشسته باشید و به بال هواپیما نگاه کنید قبل و در حین فرود سطحی از بال هواپیما خارج میشود و مساحت آنرا افزایش میدهد. این سطح را فلاپ میخوانیم. همانطور که گفتیم فلاپها سطح بال را افزایش میدهند. این افزایش سطح باعث افزایش جریان هوا در زیر بال هواپیما شده و هواپیما را وادار به بالا رفتن میکند. معمولاً از فلاپها هنگام فرود استفاده میشود اما در شرایطی خاص ممکن است هنگام برخاستن هواپیما هم از آنها استفاده شود که البته بعد از برخاستن بسته میشوند. فلاپها غالباً با درجات متفاوتی نشان داده میشوند. این خلبان است که بر اساس شرایط، درجهای مناسب را انتخاب میکند.
:اگر از فلپ ها به طور صحیح استفاده گردد میزان نیروی لیفت که بال تولید میکند زیاد
شده و در نتیجه سرعت stall کاهش می یابد.
به کمک فلپ ها میتوان با سرعت کم پرواز نمود وکنترل کافی وقابل قبول بر بیروی لیفت
داشت.این نکته را به خاطر باید داشت که با جمع کردن فلپ ها سرعت stall دوباره افزایش
می یابد.
فلپ های متداول در هواپیما:
1- plain flap
2-split flap
3- slotted flap
4-fowler flap
plain flap: به وسیله لولا به انتهای بال وصل میشود.هنگامی که فلپ ساده به سمت
پایین انحنا پیدا میکند قوس بال را افزایش داده و همچنین خط وتر بال را تغییر میدهد که
این دو عامل موجب افزایش مقدار نیروی لیفت بال میشود.
split flap: به سطح زیرین بال لولا شده وموجب افزایش نیروی لیفت میشود ولی drag
تولید شده ی آن از فلپ های ساده بیشتر است زیرا در قسمت زیرین بال نصب میشود و
توربولانس ایجاد میکند.
slotted flap: اسلات (salt) یا پیش بال: به سطح کوچک آیرودینامیکی در لبهی حملهی یک بال هواپیما گفته میشود. پیش بال صفحهی متحرکی بر روی لبهی حملهی بال است که با بازشدن آن شکافی بین صفحه و لبهی بال ایجاد شده و هوا از زیر بال به روی آن جریان مییابد. زمانی که پیش بال باز میشود زاویهی حملهی بال بیشتر است.
در طول برخاستن و نشستن هواپیما، فلاپهای عقب بال از لبهی عقبی ایرفویل باز میشوند. این عمل سریعاً شکل بال را عوض کرده و باعث میشود هوای بیشتری به سمت بالها حرکت کرده و در نتیجه نیروی برآر بیشتری تولید میشود. این تغییر همچنین نیروی پسار را افزایش میدهد که باعث کاهش سرعت هواپیمای در حال فرود میشود (ولی هنگام تیک آف لزوماً نیروی رانش بیشتری نیاز است).
اسلات یا پیش بال کاربردی مشابه فلاپ دارد (تغییر موقتی شکل بال برای افزایش نیروی برآر)، اما اسلاتها به جلوی بال متصل هستند نه قسمت عقب آن. همانطور که گفته شد خلبانها هنگام برخاستن و فرودآمدن از اسلات استفاده میکنند.از نظر شکل ظاهری شبیه فلپ ساده است. این نوع فلپ علاوه بر تغییراتی
کهدر انحنا خط وتر ایجاد میکند باعث میشود بخشی از هوای متراکم و پرفشار سطح زیرین
بال از طریق شکاف فوقانی هدایت شود این عمل به جریان هوای سطح فوقانی فلپ سرعت
بخشیده و در نتیجه مقدار نیروی لیفت افزایش پیدا می کند..
fowler flap: این نوع فلپ توسط سیستم پیچیده ای از ریل ها و قرقره ها به بال متصل شده
است این نوع فلپ هنگامی که کامل شود هم زمان که پایین می آید به سمت عقب نیز حرکت
می کند. حرکت رو به عقب فلپ باعث افزایش مساحت کلی بال می شود.
این نوع فلپ ها از نظر کارایی بهترین نوع فلپ هستند و هم چنین از نظر قیمتی گران تر از سایر
فلپ ها هستند.
slot و slat:
صفحاتی هستند که جریان پرفشار سطح زیرین بال را به قسمت بالای بال منتقل میکند
و موجب پایین آوردن سرعت stall میشود. به این علت که جدا شدن مولکولهای هوا از سطح
بالای بال به تعویق می اندازد.
landing edge flap:
مانند فلپ های لبه فرار عمل نموده و سطح بال را افزایش می دهند و در نتیجه تولید نیروی
لیفت می نماید.
spoiler:
سطوحی هستند که در هنگام لمس کردن چرخ های اصلی هواپیما با سطح باند مورد
استفاده قرار میگیرند.این سطوح موجب میشود که نیروی لیفت ایجاد شده بر روی سطح بال
کاهش یابد در هنگام landing وزن هواپیما را از بالها به چرخ های هواپیما می کند و موجب
ایستادن هواپیما در مسافت کمتری می شونداسپویلر ها یکی از رایج ترین سازه هایی هستند که در هواپیماهای تجاری به کار برده میشوند. هدف از ساخت این سازه بر روی بال های هواپیما، بر هم زدن نیروی Lift (که نیرویی است که باعث به پرواز در آمدن هواپیما میشود و رو به بالا میباشد) وافزایش نیروی Drag (نیرویی است که خلاف جهت حرکت هواپیما عمل میکند و مانند نیروی اصطکاک میباشد) میباشد.
اسپویلر ها، قطعات مسطح فلزی هستند که بر روی سطح بالایی بال هواپیما نصب میشوند که با بکارگیری آنها، این قطعات مسطح به سمت بالا حرکت کرده و در مقابل جریان هوا قرار میگیرند.
اسپویلر ها از نظر استفاده به طور کلی در 3 بخش دسته بندی میگردند:
1⃣اسپویلر ها در پرواز(Flight spoilers): از اسپویلر ها جهت کاهش سرعت هواپیما و همچنین، جهت افزایش نرخ کاهش ارتفاع در پرواز استفاده میگردد. یکی از استفاده های مهمی که از اسپویلر به هنگام فرود میشود، زمانی است که هواپیما جهت فرود به چند متری باند فرودگاه میرسد. مشکلی که در این زمان به وجود می آید این است که به دلیل ایجاد فرآیندی به نام گراند افکت(Ground effect)، نیروی lift ناگهان شروع به افزایش میکند. یعنی هواپیما در فاصله چند متری باند میماند و قادر به پایین آمدن و برخورد چرخ ها با زمین نمیباشد. در نتیجه اسپویلر ها به صورت خودکار باز شده تا نیروی lift را بر هم زده و به هواپیما اجازه کاهش ارتفاع را بدهد.
?به طور کلی شرکت های هواپیمایی محدود به استفاده از اسپویلر ها در خلال پرواز هستند. چرا که این عمل باعث ایجاد صدا و لرزش در هواپیما شده و باعث نگرانی مسافران میگردد.
2⃣اسپویلر ها در زمین(Ground spoilers): پس از فرود، هواپیما دارای سرعت بالایی میباشد، که این احتمال وجود دارد که هواپیما دوباره به پرواز در آید. بنابراین اسپویلر ها که بر هم زننده نیروی Lift میباشند، از پرواز دوباره هواپیما جلوگیری میکنند.
3⃣اسپویلر ها در گردش(Roll spoilers): از اسپویلر ها برای انجام گردش در پرواز نیز استفاده میگردد. به عنوان مثال، زمانی که هواپیما قصد گردش به سمت راست را داشته باشد، هواپیما طبیعتا باید حول محور طولی خود، به سمت راست بچرخد. در عمل، این اتفاق به وسیله افزایش نیروی Lift در بال چپ و کاهش نیروی Lift بر روی بال راست می افتد. اسپویلر های روی بال راست جهت کاهش نیروی Lift در این بال کمک میکنند. اما اسپویلر سمت چپ در حالت باز نشده باقی میماند
سازه هواپیما
قسمت های اصلی هواپیما:
1 :بدنه(fuselage)
2 :بال(wing)
3 :دم (tail)( Empennage)
بدنه هواپیما :
بدنه هواپیما قسمت اعظم ساختمان هواپیما را تشکیل می دهد و محلی مناسب برای جا سازی نصب و نگهداری بسیاری از دستگاه ها و قطعات هواپیما می باشد .
قسمت های اصلی هواپیما:
1 :بدنه(fuselage)
2 :بال(wing)
3 :دم (tail)( Empennage)
بدنه هواپیما :
بدنه هواپیما قسمت اعظم ساختمان هواپیما را تشکیل می دهد و محلی مناسب برای جا سازی نصب و نگهداری بسیاری از دستگاه ها و قطعات هواپیما می باشد . بسته به نوع هواپیما (مسافربری- باربری-شکاری-سوخت رسان...) کابین خلبان و خدمه پروازی- کابین مسافران مخازن سوخت- بار – مهمات و غیره در داخل بدنه هواپیما طراحی و قرار داده می شود.
بدنه هواپیما از دو قسمت اساسی تشکیل می شود:
1-استخوان بندی یا اسکلت(structure) که شکلهای گوناگون طراحی و ساخته می شود.
2 –پوسته بدنه(skin) که عبارتند از چندین صفحه فلزی صاف به نام (panel) که غالبا از جنس آلیاژ آلومینیوم های ضد زنگ می باشند و در نقاط مختلف بدنه هواپیما بر حسب فشار ناشی از پرواز- تحمل بار و سنگینی ضخامت آنها متفاوت می شود.
علاوه بر دو قسمت فوق صفحات فلزی دیگری در بدنه هواپیما بکار گرفته می شود این صفحات را تیزه گیر (fairing) و یا مغزی (fillet) می گویند که دارای سطحی صاف و هموار و قوسی شکل می باشند و محل اتصالات نظیر محل اتصال بال ها ،دم هواپیما، موتور ها به بدنه را که دارای زاویه خواهند بود می پوشاند و از ایجاد نیروی پسا drag در محل های اتصال جلوگیری می نمایند.
-انواع بدنه
نمای اصلی کلی هر هواپیما ناشی از نوع استخوان بندی بخصوصی است که برای آن هواپیما مدنظر گرفته می شود بدنه هواپیما (fuselage) بر چهار نوع است:
-داربستی : (truss)
-وارن تراس(warren truss)
-تخم مرغی (mono coque)
-نیمه تخمه مرغی (semi-mono coque)
بدنه هواپیما از نوع داربستی :از این نوع ساختمان بدنه امروزه تنها در ساخت هواپیما های کوچک استفاده می شود به طور کلی این بدنه دارای چهار پایه اصلی langeron است که بوسیله چند تیرک عمودی vertical و گاهی میله های فلزی rodsبه یکدیگر وصل شده اند در استخوان بندی داربستی فشار وارده بر هواپیما بیشتر توسط همین داربست تحمل می شود. این داربست مجموعه ای از تیرکها، میله ها، لوله ها و سیمها که بعنوان شاسی بدنه عمل می نماید.
بدنه از نوع وارن تراس :
مهمترین نوع اسکلت بندی وارن تراس می باشد. در این نوع اسکلت کلیه اجزای تراس به صورت مثلثی بهم وصل شده و چهار چوب آن تماما جو شکاری می شود بزرگترین مزیت این نوع اسکلت بندی این است که اجزای متشکله فقط در معرض نیروی کششی و فشار قرار می گیرند ولی نیروی خمش در آن هیچ تاثیری ندارد.
بدنه از نوع تخم مرغی :
این بدنه در حقیقت مانند یک پوسته هواپیما را در بر می گیرد و از آلومینیوم یا آلیاژی از این نوع بدنه بدون تقویت اجزا آن فشار وارده بر هواپیما را تحمل می نماید.
بدنه از نوع نیمه تخمه مرغی :
اکثر هواپیما های مدرن کنونی دارای این نوع ساختمان بدنه می باشند این نوع ساختمان از محفظه ای تو خالی با پوشش فلزی درست شده است که در داخل آن قالب های former بیضی شکل یا دایره ای و بعضی از اوقات چهارگوش قرار دارد که به وسیله تیغه هایی به نام
bulk head حلقه ها rings را به هم متصل کرده و تقویت شده اند در این نوع ساختمان فشار ها آئرودینامیکی بطور متناسب و یکنواخت بین پوسته خارجی بدنه و اسکلت تقسیم گردیده و در برابر فشار های پیچشی بسیار مقاوم است.
بالها :
اساسی ترین قسمت هواپیما در تأمین نیروی lifting force که باعث بلند شدن هواپیما از زمین و اوج گرفتن آن می شود بالها می باشند.بالها وزن کلی هواپیما را در پرواز نموده و قسمت اعظم فشار ها و تکانهای شدید بر هواپیما ضمن پرواز را خنثی می نمایند در بعضی از هواپیما ها بال دو قسمت دارد :
بال راست و بال چپ و در تعدادی دیگر بال از سه قسمت بال راست و بال چپ و بال مرکزی center wingتشکیل می شود.
بال های هواپیما از نظر پوشش دارای دو نوع پوشش زیر می باشند :
1: بال با پوشش پارچه ای(wood and clothe wing)
2: بال با پوشش ورقه فلزی (stress skin wing)
طبقه بندی هواپیما برحسب شکل بالها(by shape):
بال ذوزنقه ای- بال ذوزنقه ای معکوس –بال مستطیلی یا صلیبی –بال لوزی شکل –بال مثلثی یا دلتا –بال پیکانی شکل
دم هواپیما :
کلیه قسمت های عقب یا انتهای بدنه هواپیما به اضافه یک یا چند سکان عمودی یا افقی را دم tail می گویند.
کار سکان های افقی و عمودی یا در حقیقت وظیفه ی قسمت دم هواپیما ایجاد تعادل و ثبات هواپیما در پرواز و کمک در هدایت آن به سمت های راست ،چپ،پایین و بالا می باشد.
سکان افقی(horizontal, stabilizer)
در بعضی از هواپیما ها ممکن است سکان افقی بوده و بتواند دور محور طولی خود بچرخد و بدین نحو تعادل هواپیما را حول محور عرضی آن تامین نماید سکان افقی به انتها ی بدنه و هم روی سکان عمودی سوار می کنند.
سکان عمودی (vertical stabilizer) :
این سکان به طور عمودی به انتها ی بدنه و بین دو سکان افقی چپ و راست قرار دارد. وظیفه اصلی این سطح ایجاد حفظ تعادل عرضی هواپیما در پرواز و جلوگیری از انحراف ناخواسته به چپ و راست بوده و تعادل هواپیما را حول محور عمودی تامین می کند موتور ها و ملخ هواپیما ایجاد گشتاور torque پیچشی نمایند که به وسیله سکّان عمودی خنثی شده و هواپیما متعادل می گردد.
از نظر نوع بال ، بطور کلی دو نوع هواپیما وجود دارد:
هواپیماهای با بال ثابت (Fixed wing Aircraft)
هواپیماهای با بال چرخنده (Rotary wing Aircraft)
نوع اول هواپیما و به نوع دوم هلیکوپتر یا چرخبال نام دارد. هواپیماها عموما دارای بال ثابت هستند و در طول پرواز بال نمیچرخد. ولی هلیکوپتر ، هواپیمائی است که بالش در حال پرواز به دور یک محور میچرخد.
انواع هواپیما از نظر دارا بودن سرنشین
از نظر دارا بودن سرنشین ، هواپیماها به دو گونه کلی تقسیم میگردند:
هواپیماهای با سرنشین (Manned Aircraft)
هواپیماهای بدون سرنشین (Unmanned Aircraft)
هواپیماهای بدون سرنشین شامل موشک هدایت شونده ( Missile ) ، موشک هدایت نشونده ( Rocket ) ، هواپیماهای کنترل از راه دور ( RPV یا Remote Piloted Vehicle ) و غیره میباشند.
انواع هواپیما از نظر چگالی
از نظر جرم حجمی هواپیماها به دو دسته کلی تقسیم میشوند:
هواپیماهای سنگینتر از آزمایشهای مربوط به هوا (Heavier than Air Aircraft)
هواپیماهای سبکتر از آزمایشهای مربوط به هوا (Lighter than Air Aircraft)
نوع دوم شامل بالن (Balloon) ، کشتی هوائی (Air ship) و مانند اینهاست.
Sligo-plane-landing
انواع هواپیمای مانوری
از نظر قدرت مانوری ، هواپیماها به چهار نوع مختلف تقسیم میکردند:
هواپیماهای غیر مانوری (Normal (Non - Aerobatic) Aircraft)
هواپیماهای نیمه مانوری (Utility (Semi - Aerobatic) Aircraft)
هواپیماهای مانوری (Aerobatic Aircraft)
هواپیماهای بسیار مانوری (High Maneuverability Aircraft)
مرکز تولید نیرو (Powerplant)
بدنه (Fuselage)
بال (Wing)
دم (Empennage)
ارابه فرود (Landing gear)مجموعه دم هواپیما (Empennage) نیز بخش اصلی دیگری از هواپیما است. دم هواپیما از قسمت های ثابت و متحرک مختلفی تشکیل شده است. پایدارکننده عمودی، پایدارکننده افقی و سطوح متحرکی مانند سکان و بالابرندهها از آن جمله هستند.
پایدارکنندهها (Stabilizer): کار پایدارکننده ایجاد پایداری چه در جهت افقی و چه در جهت عمودی است.
پایدارکننده عمودی (Vertical stabilizer): دماغه هواپیما را از تاب خوردن به چپ و راست (yaw) بازمیدارد. اما در صورت نیاز، خلبان با کمک همین بخش میتواند هواپیما را به سمت چپ یا راست متمایل کند (تصویر ۵).
سکان هواپیما (Rudder): سکان هواپیما قسمت متحرکی از پایدارکننده عمودی است که کمک میکند هواپیما وضعیت جاری دماغه خود را حفظ کند. سکان نه برای تغییر جهت هواپیما، بلکه برای پایدار نگاه داشتن هواپیما هنگام تغییر جهت به کار میرود. هواپیما برای تغییر جهت دادن بالهای خود را با زاویه خاصی که به منحنی گردش به چپ و راست بستگی دارد، خم میکند.
پایدارکننده افقی (Horizontal stabilizer): دماغه هواپیما را از تاب خوردن در جهت بالا و پایین (pitch) بازمیدارد. اما در صورت نیاز، خلبان با کمک همین بخش میتواند هواپیما را به سمت چپ یا راست متمایل کند (تصویر ۶).
بالابرندهها (Elevator): بالابرندهها هواپیما را در فراز و فرودهایش (حرکت دماغه به بالا یا پایین) پایدار نگاه میدارند و نیز به تغییر زاویه حمله هواپیما کمک میکنند. وقتی بالابرنده بالا میرود، نیروی پایینبرنده افزایش مییابد و دم را به سمت پایین میکشد و دماغه را بالا میبرد. وقتی بالابرنده پایین بیاید، نیروی پایینبرنده در دم هواپیما کاهش مییابد و سبب میشود دم بالا برود و دماغه هواپیما پایینتر بیاید.
اجزای هواپیما
. نقش پایدارکننده عمودی (Vertical stabilizer) در تغییر جهت هواپیما به چپ یا راست
اجزای هواپیما
. نقش پایدارکننده افقی (Horizontal stabilizer) در تغییر جهت دماغه هواپیما به بالا یا پایین
ارابه فرود هواپیما
از دیگر اجزای اصلی هواپیما، ارابه فرود است. ارابه فرود بخشی است که اجازه میدهد هواپیما پس از پایان پرواز مجددا بر زمین بنشیند. ضمنا ارابه فرود مهمترین تکیهگاه هواپیما هنگام توقف، حرکت روی باند، برخاستن از زمین و نیز هنگام فرود است. ارابه فرود اغلب شامل چرخ است اما برخی از هواگردها مثل هواپیماهای آبنشین بهجای چرخ، ارابه فرود شناور (float) و هواپیماهای برفنشین بخشی مانند چوب اسکی دارند.
ارابه فرود بسیاری از هواپیماها از سه مجموعه چرخ اصلی تشکیل شده است: دو مجموعه چرخ در دو سمت هواپیما (معمولا زیر بالها) و یک چرخ در جلو یا عقب هواپیما. تکچرخ عقب یا جلو هواپیما هدایتپذیر است و خلبان میتواند با کمک آن هواپیما را روی زمین در جهتهای مختلف هدایت کند و راه ببرد.
قسمتهای اصلی ساختاری بال عبارتند از: اسپارها ، دنده ها و تارها. اجزای بال. اینها با خرپاها ، تیرهای I ، لوله ها یا سایر وسایل ، از جمله پوست تقویت می شوند. ... لبه های بال متصل به عقب ، یا عقب ، دو نوع سطح کنترل هستند که به آنها آیلرون و فلپ گفته می شود.بالهای هواپیما برای پرواز از طریق بالابر بسیار مهم هستند ، اما قسمتهای زیادی از بال را برای کنترل مقدار و جهت بالابر در اختیار دارند.
ایلرونز. ...
فلپ ها ...
وینگلت ...
اسلات ها ...
اسپویلر
که فلپ وانواع آنفلاپ (Flap): اگر هنگام پرواز با هواپیما کنار پنجره نشسته باشید و به بال هواپیما نگاه کنید قبل و در حین فرود سطحی از بال هواپیما خارج میشود و مساحت آنرا افزایش میدهد. این سطح را فلاپ میخوانیم. همانطور که گفتیم فلاپها سطح بال را افزایش میدهند. این افزایش سطح باعث افزایش جریان هوا در زیر بال هواپیما شده و هواپیما را وادار به بالا رفتن میکند. معمولاً از فلاپها هنگام فرود استفاده میشود اما در شرایطی خاص ممکن است هنگام برخاستن هواپیما هم از آنها استفاده شود که البته بعد از برخاستن بسته میشوند. فلاپها غالباً با درجات متفاوتی نشان داده میشوند. این خلبان است که بر اساس شرایط، درجهای مناسب را انتخاب میکند.
:اگر از فلپ ها به طور صحیح استفاده گردد میزان نیروی لیفت که بال تولید میکند زیاد
شده و در نتیجه سرعت stall کاهش می یابد.
به کمک فلپ ها میتوان با سرعت کم پرواز نمود وکنترل کافی وقابل قبول بر بیروی لیفت
داشت.این نکته را به خاطر باید داشت که با جمع کردن فلپ ها سرعت stall دوباره افزایش
می یابد.
فلپ های متداول در هواپیما:
1- plain flap
2-split flap
3- slotted flap
4-fowler flap
plain flap: به وسیله لولا به انتهای بال وصل میشود.هنگامی که فلپ ساده به سمت
پایین انحنا پیدا میکند قوس بال را افزایش داده و همچنین خط وتر بال را تغییر میدهد که
این دو عامل موجب افزایش مقدار نیروی لیفت بال میشود.
split flap: به سطح زیرین بال لولا شده وموجب افزایش نیروی لیفت میشود ولی drag
تولید شده ی آن از فلپ های ساده بیشتر است زیرا در قسمت زیرین بال نصب میشود و
توربولانس ایجاد میکند.
slotted flap: اسلات (salt) یا پیش بال: به سطح کوچک آیرودینامیکی در لبهی حملهی یک بال هواپیما گفته میشود. پیش بال صفحهی متحرکی بر روی لبهی حملهی بال است که با بازشدن آن شکافی بین صفحه و لبهی بال ایجاد شده و هوا از زیر بال به روی آن جریان مییابد. زمانی که پیش بال باز میشود زاویهی حملهی بال بیشتر است.
در طول برخاستن و نشستن هواپیما، فلاپهای عقب بال از لبهی عقبی ایرفویل باز میشوند. این عمل سریعاً شکل بال را عوض کرده و باعث میشود هوای بیشتری به سمت بالها حرکت کرده و در نتیجه نیروی برآر بیشتری تولید میشود. این تغییر همچنین نیروی پسار را افزایش میدهد که باعث کاهش سرعت هواپیمای در حال فرود میشود (ولی هنگام تیک آف لزوماً نیروی رانش بیشتری نیاز است).
اسلات یا پیش بال کاربردی مشابه فلاپ دارد (تغییر موقتی شکل بال برای افزایش نیروی برآر)، اما اسلاتها به جلوی بال متصل هستند نه قسمت عقب آن. همانطور که گفته شد خلبانها هنگام برخاستن و فرودآمدن از اسلات استفاده میکنند.از نظر شکل ظاهری شبیه فلپ ساده است. این نوع فلپ علاوه بر تغییراتی
کهدر انحنا خط وتر ایجاد میکند باعث میشود بخشی از هوای متراکم و پرفشار سطح زیرین
بال از طریق شکاف فوقانی هدایت شود این عمل به جریان هوای سطح فوقانی فلپ سرعت
بخشیده و در نتیجه مقدار نیروی لیفت افزایش پیدا می کند..
fowler flap: این نوع فلپ توسط سیستم پیچیده ای از ریل ها و قرقره ها به بال متصل شده
است این نوع فلپ هنگامی که کامل شود هم زمان که پایین می آید به سمت عقب نیز حرکت
می کند. حرکت رو به عقب فلپ باعث افزایش مساحت کلی بال می شود.
این نوع فلپ ها از نظر کارایی بهترین نوع فلپ هستند و هم چنین از نظر قیمتی گران تر از سایر
فلپ ها هستند.
slot و slat:
صفحاتی هستند که جریان پرفشار سطح زیرین بال را به قسمت بالای بال منتقل میکند
و موجب پایین آوردن سرعت stall میشود. به این علت که جدا شدن مولکولهای هوا از سطح
بالای بال به تعویق می اندازد.
landing edge flap:
مانند فلپ های لبه فرار عمل نموده و سطح بال را افزایش می دهند و در نتیجه تولید نیروی
لیفت می نماید.
spoiler:
سطوحی هستند که در هنگام لمس کردن چرخ های اصلی هواپیما با سطح باند مورد
استفاده قرار میگیرند.این سطوح موجب میشود که نیروی لیفت ایجاد شده بر روی سطح بال
کاهش یابد در هنگام landing وزن هواپیما را از بالها به چرخ های هواپیما می کند و موجب
ایستادن هواپیما در مسافت کمتری می شونداسپویلر ها یکی از رایج ترین سازه هایی هستند که در هواپیماهای تجاری به کار برده میشوند. هدف از ساخت این سازه بر روی بال های هواپیما، بر هم زدن نیروی Lift (که نیرویی است که باعث به پرواز در آمدن هواپیما میشود و رو به بالا میباشد) وافزایش نیروی Drag (نیرویی است که خلاف جهت حرکت هواپیما عمل میکند و مانند نیروی اصطکاک میباشد) میباشد.
اسپویلر ها، قطعات مسطح فلزی هستند که بر روی سطح بالایی بال هواپیما نصب میشوند که با بکارگیری آنها، این قطعات مسطح به سمت بالا حرکت کرده و در مقابل جریان هوا قرار میگیرند.
اسپویلر ها از نظر استفاده به طور کلی در 3 بخش دسته بندی میگردند:
1⃣اسپویلر ها در پرواز(Flight spoilers): از اسپویلر ها جهت کاهش سرعت هواپیما و همچنین، جهت افزایش نرخ کاهش ارتفاع در پرواز استفاده میگردد. یکی از استفاده های مهمی که از اسپویلر به هنگام فرود میشود، زمانی است که هواپیما جهت فرود به چند متری باند فرودگاه میرسد. مشکلی که در این زمان به وجود می آید این است که به دلیل ایجاد فرآیندی به نام گراند افکت(Ground effect)، نیروی lift ناگهان شروع به افزایش میکند. یعنی هواپیما در فاصله چند متری باند میماند و قادر به پایین آمدن و برخورد چرخ ها با زمین نمیباشد. در نتیجه اسپویلر ها به صورت خودکار باز شده تا نیروی lift را بر هم زده و به هواپیما اجازه کاهش ارتفاع را بدهد.
?به طور کلی شرکت های هواپیمایی محدود به استفاده از اسپویلر ها در خلال پرواز هستند. چرا که این عمل باعث ایجاد صدا و لرزش در هواپیما شده و باعث نگرانی مسافران میگردد.
2⃣اسپویلر ها در زمین(Ground spoilers): پس از فرود، هواپیما دارای سرعت بالایی میباشد، که این احتمال وجود دارد که هواپیما دوباره به پرواز در آید. بنابراین اسپویلر ها که بر هم زننده نیروی Lift میباشند، از پرواز دوباره هواپیما جلوگیری میکنند.
3⃣اسپویلر ها در گردش(Roll spoilers): از اسپویلر ها برای انجام گردش در پرواز نیز استفاده میگردد. به عنوان مثال، زمانی که هواپیما قصد گردش به سمت راست را داشته باشد، هواپیما طبیعتا باید حول محور طولی خود، به سمت راست بچرخد. در عمل، این اتفاق به وسیله افزایش نیروی Lift در بال چپ و کاهش نیروی Lift بر روی بال راست می افتد. اسپویلر های روی بال راست جهت کاهش نیروی Lift در این بال کمک میکنند. اما اسپویلر سمت چپ در حالت باز نشده باقی میماند
-
rohamavation
نام: roham hesami radرهام حسامی راد
محل اقامت: 100 مایلی شمال لندن جاده آیلستون، لستر، لسترشر. LE2
عضویت : سهشنبه ۱۳۹۹/۸/۲۰ - ۰۸:۳۴
پست: 3278-
سپاس: 5494
- جنسیت:
تماس:
Re: هوافضا
قسمتها یا اجزای اصلی هواپیما: مرکز تولید نیرو و بدنه و بال و دم و ارابه فرود
اجزای اصلی هواپیما چه هستند؟
هواپیماها در گذر زمان بسیاری تغییر کرده و پیچیدهتر شدهاند. کاربردها و قابلیتهای آنها نیز معمولا پیوسته افزایش یافته است. اما اجزای اصلی هواپیما طی تمام این سالها تقریبا ثابت مانده است. در این مطلب، به قسمتها یا اجزای اصلی هواپیما و سپس به زیرساختارهای هر بخش و انواع آنها اشاره خواهدشد.
اجزای اصلی هواپیما
مرکز تولید نیرو (Powerplant)
بدنه (Fuselage)
بال (Wing)
دم (Empennage)
ارابه فرود (Landing gear)
قسمتها یا اجزای اصلی هواپیما
مطلب مرتبط: موتور الکتریکی چیست و چگونه کار میکند
۱. مرکز تولید نیرو (موتور و پیشران هواپیما)
یکی از اجزای اصلی هواپیما مرکز تولید نیرو است. گاهی مرکز تولید نیروی هواپیما را با موتور یکی میگیرند، اما مرکز تولید نیرو در اصل از موتور (engine) بهعلاوه پیشران (propeller) تشکیل شده است. موتور، نیروی لازم برای به حرکت درآمدن پیشران را تامین میکند. در هواپیماهای قدیمیتر کوچک، موتور در جلوی بدنه بود. اما هواپیماهای بزرگتر تجاری و ترابری که به نیروی رانش و نیروی بالابرنده (برآ) بسیار بیشتری نیاز دارند، معمولا از چند مرکز تولید نیرو بهره میبرند. به همین علت، موتور هواپیما به کنارههای بدنه منتقل شده است تا بتوان چند مرکز تولید نیرو را در هواپیما جای داد.
در هواپیماهای پیشرفته امروزی، مرکز تولید نیرو توان الکتریکی لازم برای به کار انداختن تمام اجزای برقی هواپیما از جمله ابزارهای پروازی، گرمایش کابین (در صورت کاهش دمای آن به حدود ۱۰ درجه و افزایش ارتفاع آن به ۱۰۰۰ متر) را نیز فراهم میآورد.
مرکز تولید نیرو و موتور هواپیما
پوشش موتور (nacelle) بخشی در زیر بال هواپیماست که موتور را میپوشاند و جریان هوا را بهنرمی از اطراف خود عبور میدهد تا با کاستن از میزان مقاومت هوا مصرف سوخت هواپیما را حتیالامکان کاهش دهد.
پیشران هواپیما توان تولید شده توسط موتور را به نیروی رانش جلوبرنده یا اصطلاحا نیروی تراست (thrust) تبدیل میکند. در بسیاری از هواپیماهای قدیمی و تکموتوره، پیشران همان ملخ هواپیما بود که جلوی هواپیما نصب میشد.
۲. بدنه هواپیما
بدنه هواپیما از دیگر اجزای اصلی هواپیما است و کابین خلبان و کابین سرنشینان یا مسافران را شامل میشود. اغلب بسته به نوع هواپیما فضایی هم برای بار در نظر گرفته میشود. ساختار و مواد به کار رفته در بدنه نیز بسته به نوع هواپیما بسیار متفاوت است. در هواپیماهای قدیمی از فولاد و حتی از چوب استفاده میشد. اما امروزه در هواپیماهای کوچک پیشرفته، برای کاهش وزن و افزایش قدرت هواپیما از تیوبهای آلومینیومی بسیار شکلپذیر استفاده میشود. سطح بیرونی بدنه هواپیماهای امروزی نیز با لایههای آلومینیومی پوشیده میشود.
انواع بدنه هواپیما
برای بدنه هواپیما چهار نوع ساختار میتوان تعریف کرد:
داربستی (truss)
داربست مثلثی (warren truss)
یکپارچه (monocoque)
نیمهیکپارچه (semi-monocoque)
بدنه داربستی (truss)
خرپا یا داربست (truss)، چارچوب مشبک دوبعدی است که با پیوستن آنها بههم، اسکلت بدنه هواپیما شکیل میگیرد. در ساختار داربستی، بارها یا وزنها یکشکل در بدنه توزیع نمیشوند. ضمنا این نوع ساختار، فضای چندانی برای کابین فراهم نمیکند.
بدنه داربست مثلثی (warren truss)
داربست مثلثی مقاومتر از داربست ساده است اما باز، کاستیهایی دارد. لذا در هواپیماهای امروزی، برای توزیع یکنواخت نیروها بدنه یکپارچه (monocoque) یا نیمهیکپارچه (semi-monocoque) به کار میرود.
ساختار بدنه داربستی مثلثی
دنه یکپارچه (monocoque) و نیمهیکپارچه (semi-monocoque)
بدنه یکپارچه بسیار قدرتمند است و وزنها را بهتر تحمل میکند، اما نمیتواند آسیبهای فیزیکی سطح را تحمل کند. برای مثال، دم و دماغه هواپیماهایی که بدنه یکپارچه دارند، بسیار مقاوم اما کنارههای هواپیما آسیبپذیرند و با وارد آمدن همان مقدار نیرو شاید له شوند. لذا بدنه یکپارچه شاید برای هواپیماهای کوچکتر مناسب باشد، اما برای هواپیماهای بزرگتر مسافربری و باربری مناسب نیست. هواپیماهای بزرگ باید وزنهای خمشی را تحمل کنند و لذا پوسته بسیار ضخیمی میطلبند. در این نوع هواپیماها بدنه نیمهیکپارچه به کار میرود.
بدنه یکپارچه و نیمهیکپارچه هواپیما
۳. بالهای هواپیما
بالها نیز از دیگر اجزای اصلی هواپیما هستند. بالها قطعات هوابُر یا اصطلاحا ماهیواره (aerofoil) هستند که به دوسوی بدنه میچسبند تا نیروی برآر یا بالابرنده (lift force) ایجاد کنند. وقتی ذرات هوا از بال عبور میکنند، بالها بسته به شکلشان فشار متفاوتی ایجاد میکنند. بالها ممکن است به بخش فوقانی، میانی یا تحتانی بدنه متصل باشند. بال هواپیما اجزای متحرکی دارد که شهپر (aileron) و برآفزا (flap) از آن جملهاند.
اجزای دم و بال هواپیما
زاویه بال (یا برآافزاهای متصل به بال) را میتوان تغییر داد تا یا شدت نیروی برآر را تغییر دهند و یا هنگام نشست و برخاست هواپیما سرعت و ارتفاع آن را کنترل کنند. در هوابُرهای متقارن، نیروی برآر صفر است و بسته به زاویه افزایش مییابد. نیروی برآر بهتدریج افزایش مییابد و تقریبا در زاویه ۱۵ درجه به حداکثر میرسد. پس از گذر از زوایه ۱۵ درجه (وقتی که بالها اصطلاحا حالت حمله به خود میگیرند) ذرات هوا از بال جدا میشوند و هواپیما اصطلاحا حالت واماندگی (stall) مییابد.
بال هواپیما اجزای متحرکی دارد که شهپر (aileron) و برآفزا (flap) از آن جملهاند.
هواپیما برای چرخش حول محور طولی خود از شهپر استفاده میکند. شهپر معمولا هماهنگ با سکان عمل میکند.
برآفزاها، نیروی بالابرنده هواپیما (lift) را در سرعتهای کم مثلا هنگام نشست و برخاست آن افزایش میدهند. در معدودی از هواپیماها نیز برآفزا نزدیک دماغه هواپیما تعبیه میشود که در اینصورت بهآن پیش بال (canard) میگویند.
بال هواپیما
۴. دم هواپیما
مجموعه دم هواپیما (Empennage) نیز بخش اصلی دیگری از هواپیما است. دم هواپیما چند قسمت ثابت و متحرک دارد. پایدارکننده عمودی، پایدارکننده افقی و سطوح متحرکی مانند سکان و بالابرندهها از آن جمله هستند.
پایدارکنندههای دم هواپیما و اجزای آنها
پایدارکنندهها (Stabilizer): کار پایدارکننده، ایجاد پایداری چه در جهت افقی و چه در جهت عمودی است.
پایدارکننده عمودی (Vertical stabilizer)
پایدارکننده عمودی، دماغه هواپیما را از تاب خوردن به چپ و راست (yaw) بازمیدارد. در اکثر هواپیماها، پایدارکننده عمودی معمولا دو بال کوچک ثابت در دم است.
سکان هواپیما (Rudder): سکان هواپیما قسمت متحرکی از پایدارکننده عمودی است که کمک میکند هواپیما وضعیت جاری دماغه خود را حفظ کند . سکان نه برای تغییر جهت هواپیما، بلکه برای پایدار نگاه داشتن هواپیما هنگام تغییر جهت به کار میرود. هواپیما برای چرخش و تغییر جهت، شهپرهایش را به کار میگیرد.
اجزای هواپیما
. نقش سکان (Rudder) در تغییر جهت هواپیما به چپ یا راست: سکان، بخشی از پایدارکننده عمودی است.
پایدارکننده افقی (Horizontal stabilizer)
پایدارکننده افقی، دماغه هواپیما را از تاب خوردن در جهت بالا و پایین (pitch) بازمیدارد. در اکثر هواپیماها پایدارکننده افقی معمولا یک یا دو بال کوچک عمودی و ثابت در دم است.
بالابرنده (Elevator): بالابرنده، هواپیما را در فراز و فرودهایش (حرکت دماغه به بالا یا پایین) پایدار نگاه میدارد و نیز به تغییر زاویه حمله هواپیما کمک میکند (تصویر ۹). وقتی بالابرنده بالا میرود، نیروی پایینبرنده افزایش مییابد و دم را به سمت پایین میکشد و دماغه را بالا میبرد. وقتی بالابرنده پایین بیاید، نیروی پایینبرنده در دم هواپیما کاهش مییابد و سبب میشود دم بالا برود و دماغه هواپیما پایینتر بیاید. در اکثر هواپیماها، بالابرنده معمولا بخشی از پایدارکننده افقی است.
اجزای هواپیما
. نقش برآفزاها یا بالابرندهها (Elevator) در تغییر جهت دماغه هواپیما به بالا یا پایین. برآفزا، معمولا بخشی از پایدارکننده افقی است که حرکت حول محور عرضی هواپیما (محور بال به بال) را کنترل میکند.
حرکات و چرخشهای بسیاری از هواپیماها با سه بخش متحرک اصلی شامل برآفزا (flap)، سکان (rudder) و شهپر (aileron) انجام میشود.
۵. ارابه فرود هواپیما
از دیگر اجزای اصلی هواپیما، ارابه فرود است. ارابه فرود بخشی است که اجازه میدهد هواپیما پس از پایان پرواز مجددا بر زمین بنشیند. ضمنا ارابه فرود مهمترین تکیهگاه هواپیما هنگام توقف، حرکت روی باند، برخاستن از زمین و نیز هنگام فرود است. ارابه فرود اغلب شامل چرخ است اما برخی از هواگردها مثل هواپیماهای آبنشین بهجای چرخ، ارابه فرود شناور (float) و هواپیماهای برفنشین بخشی مانند چوب اسکی دارند.
ارابه فرود بسیاری از هواپیماها سه مجموعه چرخ اصلی دارد: دو مجموعه چرخ در دو سمت هواپیما (معمولا زیر بالها) و یک چرخ در جلو یا عقب هواپیما. تکچرخ عقب یا جلو هواپیما هدایتپذیر است و خلبان میتواند با کمک آن هواپیما را روی زمین در جهتهای مختلف هدایت کند و راه ببرد.
چکیده اجزای اصلی هواپیما
مرکز تولید نیرو (Powerplant)، بدنه، (Fuselage)، بال (Wing)، دم (Empennage) و ارابه فرود (Landing gear) اجزای اصلی ساختمان هواپیما هستند. بدیهی است که هواپیماها در گذر زمان پیچیدهتر و توانمندتر شدهاند، اما اجزا و قسمتهای اصلی آنها تقریبا ثابت مانده است.
اجزای اصلی هواپیما چه هستند؟
هواپیماها در گذر زمان بسیاری تغییر کرده و پیچیدهتر شدهاند. کاربردها و قابلیتهای آنها نیز معمولا پیوسته افزایش یافته است. اما اجزای اصلی هواپیما طی تمام این سالها تقریبا ثابت مانده است. در این مطلب، به قسمتها یا اجزای اصلی هواپیما و سپس به زیرساختارهای هر بخش و انواع آنها اشاره خواهدشد.
اجزای اصلی هواپیما
مرکز تولید نیرو (Powerplant)
بدنه (Fuselage)
بال (Wing)
دم (Empennage)
ارابه فرود (Landing gear)
قسمتها یا اجزای اصلی هواپیما
مطلب مرتبط: موتور الکتریکی چیست و چگونه کار میکند
۱. مرکز تولید نیرو (موتور و پیشران هواپیما)
یکی از اجزای اصلی هواپیما مرکز تولید نیرو است. گاهی مرکز تولید نیروی هواپیما را با موتور یکی میگیرند، اما مرکز تولید نیرو در اصل از موتور (engine) بهعلاوه پیشران (propeller) تشکیل شده است. موتور، نیروی لازم برای به حرکت درآمدن پیشران را تامین میکند. در هواپیماهای قدیمیتر کوچک، موتور در جلوی بدنه بود. اما هواپیماهای بزرگتر تجاری و ترابری که به نیروی رانش و نیروی بالابرنده (برآ) بسیار بیشتری نیاز دارند، معمولا از چند مرکز تولید نیرو بهره میبرند. به همین علت، موتور هواپیما به کنارههای بدنه منتقل شده است تا بتوان چند مرکز تولید نیرو را در هواپیما جای داد.
در هواپیماهای پیشرفته امروزی، مرکز تولید نیرو توان الکتریکی لازم برای به کار انداختن تمام اجزای برقی هواپیما از جمله ابزارهای پروازی، گرمایش کابین (در صورت کاهش دمای آن به حدود ۱۰ درجه و افزایش ارتفاع آن به ۱۰۰۰ متر) را نیز فراهم میآورد.
مرکز تولید نیرو و موتور هواپیما
پوشش موتور (nacelle) بخشی در زیر بال هواپیماست که موتور را میپوشاند و جریان هوا را بهنرمی از اطراف خود عبور میدهد تا با کاستن از میزان مقاومت هوا مصرف سوخت هواپیما را حتیالامکان کاهش دهد.
پیشران هواپیما توان تولید شده توسط موتور را به نیروی رانش جلوبرنده یا اصطلاحا نیروی تراست (thrust) تبدیل میکند. در بسیاری از هواپیماهای قدیمی و تکموتوره، پیشران همان ملخ هواپیما بود که جلوی هواپیما نصب میشد.
۲. بدنه هواپیما
بدنه هواپیما از دیگر اجزای اصلی هواپیما است و کابین خلبان و کابین سرنشینان یا مسافران را شامل میشود. اغلب بسته به نوع هواپیما فضایی هم برای بار در نظر گرفته میشود. ساختار و مواد به کار رفته در بدنه نیز بسته به نوع هواپیما بسیار متفاوت است. در هواپیماهای قدیمی از فولاد و حتی از چوب استفاده میشد. اما امروزه در هواپیماهای کوچک پیشرفته، برای کاهش وزن و افزایش قدرت هواپیما از تیوبهای آلومینیومی بسیار شکلپذیر استفاده میشود. سطح بیرونی بدنه هواپیماهای امروزی نیز با لایههای آلومینیومی پوشیده میشود.
انواع بدنه هواپیما
برای بدنه هواپیما چهار نوع ساختار میتوان تعریف کرد:
داربستی (truss)
داربست مثلثی (warren truss)
یکپارچه (monocoque)
نیمهیکپارچه (semi-monocoque)
بدنه داربستی (truss)
خرپا یا داربست (truss)، چارچوب مشبک دوبعدی است که با پیوستن آنها بههم، اسکلت بدنه هواپیما شکیل میگیرد. در ساختار داربستی، بارها یا وزنها یکشکل در بدنه توزیع نمیشوند. ضمنا این نوع ساختار، فضای چندانی برای کابین فراهم نمیکند.
بدنه داربست مثلثی (warren truss)
داربست مثلثی مقاومتر از داربست ساده است اما باز، کاستیهایی دارد. لذا در هواپیماهای امروزی، برای توزیع یکنواخت نیروها بدنه یکپارچه (monocoque) یا نیمهیکپارچه (semi-monocoque) به کار میرود.
ساختار بدنه داربستی مثلثی
دنه یکپارچه (monocoque) و نیمهیکپارچه (semi-monocoque)
بدنه یکپارچه بسیار قدرتمند است و وزنها را بهتر تحمل میکند، اما نمیتواند آسیبهای فیزیکی سطح را تحمل کند. برای مثال، دم و دماغه هواپیماهایی که بدنه یکپارچه دارند، بسیار مقاوم اما کنارههای هواپیما آسیبپذیرند و با وارد آمدن همان مقدار نیرو شاید له شوند. لذا بدنه یکپارچه شاید برای هواپیماهای کوچکتر مناسب باشد، اما برای هواپیماهای بزرگتر مسافربری و باربری مناسب نیست. هواپیماهای بزرگ باید وزنهای خمشی را تحمل کنند و لذا پوسته بسیار ضخیمی میطلبند. در این نوع هواپیماها بدنه نیمهیکپارچه به کار میرود.
بدنه یکپارچه و نیمهیکپارچه هواپیما
۳. بالهای هواپیما
بالها نیز از دیگر اجزای اصلی هواپیما هستند. بالها قطعات هوابُر یا اصطلاحا ماهیواره (aerofoil) هستند که به دوسوی بدنه میچسبند تا نیروی برآر یا بالابرنده (lift force) ایجاد کنند. وقتی ذرات هوا از بال عبور میکنند، بالها بسته به شکلشان فشار متفاوتی ایجاد میکنند. بالها ممکن است به بخش فوقانی، میانی یا تحتانی بدنه متصل باشند. بال هواپیما اجزای متحرکی دارد که شهپر (aileron) و برآفزا (flap) از آن جملهاند.
اجزای دم و بال هواپیما
زاویه بال (یا برآافزاهای متصل به بال) را میتوان تغییر داد تا یا شدت نیروی برآر را تغییر دهند و یا هنگام نشست و برخاست هواپیما سرعت و ارتفاع آن را کنترل کنند. در هوابُرهای متقارن، نیروی برآر صفر است و بسته به زاویه افزایش مییابد. نیروی برآر بهتدریج افزایش مییابد و تقریبا در زاویه ۱۵ درجه به حداکثر میرسد. پس از گذر از زوایه ۱۵ درجه (وقتی که بالها اصطلاحا حالت حمله به خود میگیرند) ذرات هوا از بال جدا میشوند و هواپیما اصطلاحا حالت واماندگی (stall) مییابد.
بال هواپیما اجزای متحرکی دارد که شهپر (aileron) و برآفزا (flap) از آن جملهاند.
هواپیما برای چرخش حول محور طولی خود از شهپر استفاده میکند. شهپر معمولا هماهنگ با سکان عمل میکند.
برآفزاها، نیروی بالابرنده هواپیما (lift) را در سرعتهای کم مثلا هنگام نشست و برخاست آن افزایش میدهند. در معدودی از هواپیماها نیز برآفزا نزدیک دماغه هواپیما تعبیه میشود که در اینصورت بهآن پیش بال (canard) میگویند.
بال هواپیما
۴. دم هواپیما
مجموعه دم هواپیما (Empennage) نیز بخش اصلی دیگری از هواپیما است. دم هواپیما چند قسمت ثابت و متحرک دارد. پایدارکننده عمودی، پایدارکننده افقی و سطوح متحرکی مانند سکان و بالابرندهها از آن جمله هستند.
پایدارکنندههای دم هواپیما و اجزای آنها
پایدارکنندهها (Stabilizer): کار پایدارکننده، ایجاد پایداری چه در جهت افقی و چه در جهت عمودی است.
پایدارکننده عمودی (Vertical stabilizer)
پایدارکننده عمودی، دماغه هواپیما را از تاب خوردن به چپ و راست (yaw) بازمیدارد. در اکثر هواپیماها، پایدارکننده عمودی معمولا دو بال کوچک ثابت در دم است.
سکان هواپیما (Rudder): سکان هواپیما قسمت متحرکی از پایدارکننده عمودی است که کمک میکند هواپیما وضعیت جاری دماغه خود را حفظ کند . سکان نه برای تغییر جهت هواپیما، بلکه برای پایدار نگاه داشتن هواپیما هنگام تغییر جهت به کار میرود. هواپیما برای چرخش و تغییر جهت، شهپرهایش را به کار میگیرد.
اجزای هواپیما
. نقش سکان (Rudder) در تغییر جهت هواپیما به چپ یا راست: سکان، بخشی از پایدارکننده عمودی است.
پایدارکننده افقی (Horizontal stabilizer)
پایدارکننده افقی، دماغه هواپیما را از تاب خوردن در جهت بالا و پایین (pitch) بازمیدارد. در اکثر هواپیماها پایدارکننده افقی معمولا یک یا دو بال کوچک عمودی و ثابت در دم است.
بالابرنده (Elevator): بالابرنده، هواپیما را در فراز و فرودهایش (حرکت دماغه به بالا یا پایین) پایدار نگاه میدارد و نیز به تغییر زاویه حمله هواپیما کمک میکند (تصویر ۹). وقتی بالابرنده بالا میرود، نیروی پایینبرنده افزایش مییابد و دم را به سمت پایین میکشد و دماغه را بالا میبرد. وقتی بالابرنده پایین بیاید، نیروی پایینبرنده در دم هواپیما کاهش مییابد و سبب میشود دم بالا برود و دماغه هواپیما پایینتر بیاید. در اکثر هواپیماها، بالابرنده معمولا بخشی از پایدارکننده افقی است.
اجزای هواپیما
. نقش برآفزاها یا بالابرندهها (Elevator) در تغییر جهت دماغه هواپیما به بالا یا پایین. برآفزا، معمولا بخشی از پایدارکننده افقی است که حرکت حول محور عرضی هواپیما (محور بال به بال) را کنترل میکند.
حرکات و چرخشهای بسیاری از هواپیماها با سه بخش متحرک اصلی شامل برآفزا (flap)، سکان (rudder) و شهپر (aileron) انجام میشود.
۵. ارابه فرود هواپیما
از دیگر اجزای اصلی هواپیما، ارابه فرود است. ارابه فرود بخشی است که اجازه میدهد هواپیما پس از پایان پرواز مجددا بر زمین بنشیند. ضمنا ارابه فرود مهمترین تکیهگاه هواپیما هنگام توقف، حرکت روی باند، برخاستن از زمین و نیز هنگام فرود است. ارابه فرود اغلب شامل چرخ است اما برخی از هواگردها مثل هواپیماهای آبنشین بهجای چرخ، ارابه فرود شناور (float) و هواپیماهای برفنشین بخشی مانند چوب اسکی دارند.
ارابه فرود بسیاری از هواپیماها سه مجموعه چرخ اصلی دارد: دو مجموعه چرخ در دو سمت هواپیما (معمولا زیر بالها) و یک چرخ در جلو یا عقب هواپیما. تکچرخ عقب یا جلو هواپیما هدایتپذیر است و خلبان میتواند با کمک آن هواپیما را روی زمین در جهتهای مختلف هدایت کند و راه ببرد.
چکیده اجزای اصلی هواپیما
مرکز تولید نیرو (Powerplant)، بدنه، (Fuselage)، بال (Wing)، دم (Empennage) و ارابه فرود (Landing gear) اجزای اصلی ساختمان هواپیما هستند. بدیهی است که هواپیماها در گذر زمان پیچیدهتر و توانمندتر شدهاند، اما اجزا و قسمتهای اصلی آنها تقریبا ثابت مانده است.
-
rohamavation
نام: roham hesami radرهام حسامی راد
محل اقامت: 100 مایلی شمال لندن جاده آیلستون، لستر، لسترشر. LE2
عضویت : سهشنبه ۱۳۹۹/۸/۲۰ - ۰۸:۳۴
پست: 3278-
سپاس: 5494
- جنسیت:
تماس:
Re: هوافضا
دم هواپیما چه کاری انجام می دهد؟
ج: دم هواپیما چندین هدف را دنبال می کند ، اما هدف اصلی ایجاد ثبات برای هواپیما است ، به این معنی که اگر هواپیما در اثر وزش باد از مسیر خارج شود ، می تواند به موقعیت اصلی خود بازگردد. ... همچنین روی دم تثبیت کننده افقی یا "بال عقب" قرار دارد که کنترل کننده گام است
دم ( tail ) در هواپیما ها جزو بخش های مهم محسوب می شود چرا که وظیفه پایداری و هدایت هواپیما در محور های عمودی وافقی را در عقب هواپیما را بر عهده دارد. دم هواپیما بر اساس نوع کاربرد و شکل ظاهری هواپیما به شکل ها و گونه های مختلفی طراحی و ساخته می شوند و انواع مختلف دارند
دم هواپیما که به عنوان تثبیت کننده افقی نیز شناخته می شود ، یک سطح بالابر کوچک است که روی دم قرار دارد در پشت سطوح اصلی بالابر هواپیمای بال ثابت و همچنین هواپیماهای بال غیر ثابت دیگر مانند هلی کوپترها و هواپیماهای کوچک. همه هواپیماهای بال ثابت هواپیمای دم ندارند. کانارد ، هواپیماهای بدون دم و بال پروازی دارای هواپیمای دم جداگانه نیستند ، در حالی که در هواپیماهای دم V ، تثبیت کننده عمودی ، سکان و صفحه دم و آسانسور با هم ترکیب می شوند و به صورت دو سطح مورب در یک طرح V شکل می گیرند.دم در هواپیما ها چه کاربردی دارد؟
دم در هواپیما ها به دو منظور پایداری و هدایت در دو محور PITCH و YAW استفاده می شود.دم هواپیما ها از لحاظ ساختار به دو قسمت افقی و عمودی تقسیم بندی می شوند که قسمت افقی آن برای کنترل پایداری و هدایت هواپیما در محور YAW و قسمت عمودی برای هدایت و حفظ پایداری پهپاد در محور PITCH مورد استفاده قرار می گیرد. اما این ساختار یک ساختار ساده و استاندارد برای دم هواپیما ها است اما برای تمامی هواپیما ها یکسان نیست و دم در هواپیما ها دارای انواع و نوع ساخت مختلف با ویژگی های متفاوتی هستند.
به طور کلی انواع مختلف طراحی و ساخت دم در هواپیما ها را می توان به یازده دسته و به صورت زیر تقسیم بندی کرد:
conventional
T-tail
cruciform-tail
dual-tail
triple-tail
V-tail
inverted V-tail
inverted Y-tail
twin-tail
boom-tail
high boom-tail
multiple-plane tail
اکثریت انواع مختلف طراحی دم ها در هواپیما های امروزی را می توان در این یازده دسته جای داد اما اشکال و طراحی های نوین و خلاقانه دیگری نیز ممکن است وجود داشته باشد که در این یازده دسته قرار نگیرد.در ادامه به بررسی جداگانه هر یک از بخش های این یازده دسته می پردازیم.
دم با ساختار استاندارد ( Conventional Tail )
این نوع از دم ها با شکلی ساده و استاندارد جزو مرسوم ترین و محبوب ترین ساختار دم در هواپیما ها محسوب می شود و بسیاری از هواپیما های مسافربری و عمومی از این نوع دم استفاده می کنند. دم هایی با این نوع شکل ساختاری همانطور که در شکل زیر مشاهده می کنید دارای یک بخش عمودی و یک بخش افقی هستند که در انتهای بدنه هواپیما قرار میگیرد.
بخش عمودی برای کنترل و هدایت هواپیما در محور YAW قرار گرفته و بخش افقی آن نیز شامل دو قسمت جداگانه می باشد که هرکدام در یک سمت بخش عمودی قرار می گیرد و برای کنترل پهپاد در محور PITCH استفاده می شود. این نوع از دم هواپیما ها می توانند پایداری مناسب و هدایت قابل قبولی را در کنار وزن ساختاری پایین داشته باشند که ویژگی مهمی در طراحی هواپیما ها می باشد و از این رو است که محبوبیت زیادی را بین طراحان هواپیما پیدا کرده است.
وظیفه هواپیمای دم ایجاد ثبات و کنترل است. به طور خاص ، هواپیمای دم به شما کمک می کند تا بتواند در تغییر موقعیت مرکز فشار یا مرکز ثقل ناشی از تغییر در سرعت و نگرش ، مصرف سوخت ، یا انداختن بار یا محموله بارگیری شود
در هواپیمایی ، ضربه دم یا ضربه دم وقتی اتفاق می افتد که دم یا خوابگاه هواپیما به زمین یا جسم ثابت دیگری برخورد کند. این می تواند با یک هواپیمای بال ثابت با حمل و نقل سه چرخه اتفاق بیفتد ، در هر دو تیک آف که خلبان بینی را خیلی سریع به سمت بالا می چرخاند ، یا در فرود زمانی که خلبان هنگام نزدیک شدن به دماغ بینی خیلی بالا می آورد ، اغلب در تلاش برای فرود آمدن بیش از حد نزدیک به باند آستانه. این امر همچنین می تواند در هنگام عملیات هلی کوپتر نزدیک به زمین ، هنگامی که دم به طور ناخواسته به مانعی برخورد می کند ، رخ دهد.
یک حادثه خفیف ضربه گیر دم ممکن است به خودی خود خطرناک نباشد ، اما اگر قرار باشد در آینده از حادثه فاجعه بار جلوگیری شود ، هواپیما هنوز ضعیف شده و باید کاملاً مورد بازرسی و بازسازی قرار گیرد.چه عاملی باعث ایجاد ضربه دم می شود؟
ضربه دم همان اتفاقی است که در انتهای عقب بدنه هواپیما به زمین می خورد. علت معمول این است که زاویه حرکت هواپیما بیش از حد تند باشد ، گرچه ممکن است در هنگام فرود نیز رخ دهد
مزایای AT tail چیست؟
دم T باعث افزایش نسبت ابعاد موثر باله به دلیل اثر "صفحه انتهایی" می شود ، جایی که مجاورت یک سطح عمود (دم افقی و بدنه در این حالت) باعث بهبود کارایی آیرودینامیکی می شود زیرا کاهش فشار هوا در انتهای سرپوشیده کاهش می یابد از سطح بالابر ، ضریب حجم دم چیست؟
ضرایب حجم دم ، مساحت سطح ، فاصله آن منطقه از فاصله هواپیما ، ناحیه بال ، وتر بال آیرودینامیکی و دهانه بال را مرتبط می کند. هواپیماهایی که دارای ضرایب حجمی یکسان هستند دارای ویژگی های پایداری ایستایی مشابه هستند. دانستن این مسئله روند طراحی را آسان می کند.
.انتهای دم هواپیما چه نام دارد؟
برای کنترل و مانور هواپیما ، بالهای کوچکتر در انتهای هواپیما قرار دارند. دم معمولاً دارای یک قطعه افقی ثابت به نام تثبیت کننده افقی و یک قطعه عمودی ثابت به نام تثبیت کننده عمودی است.اعتصاب دم چگونه اتفاق می افتد؟
وقتی دم هواپیما هنگام برخاستن یا فرود آمدن به زمین برخورد می کند ، ضربه دم رخ می دهد. اگرچه بسیاری از ضربات دم در هنگام برخاست اتفاق می افتد ، اما بیشترین آنها در هنگام فرود رخ می دهد. ضربه دم اغلب به دلیل خطای انسانی است. ضربات دم باعث آسیب قابل توجهی به دیواره فشار می شود.
کدام دو قسمت دم هواپیما را تشکیل می دهد؟
دم معمولاً دارای یک قطعه افقی ثابت به نام تثبیت کننده افقی و یک قطعه عمودی ثابت به نام تثبیت کننده عمودی است. وظیفه تثبیت کننده ها ایجاد ثبات برای هواپیما و نگه داشتن آن در پرواز مستقیم است.قسمت دم هواپیما چیست؟
Empennage نامی است که به کل قسمت دم هواپیما اعم از تثبیت کننده های افقی و عمودی ، سکان و آسانسور داده می شود.برای کنترل و مانور هواپیما ، بالهای کوچکتر در انتهای هواپیما قرار دارند. دم معمولاً دارای یک قطعه افقی ثابت به نام تثبیت کننده افقی و یک قطعه عمودی ثابت به نام تثبیت کننده عمودی است. وظیفه تثبیت کننده ها ایجاد ثبات برای هواپیما و نگه داشتن آن در پرواز مستقیم است. تثبیت کننده عمودی باعث می شود دماغه هواپیما از یک طرف به آن طرف نچرخد که اصطلاحاً yaw نامیده می شود. تثبیت کننده افقی از حرکت بالا و پایین بینی جلوگیری می کند که اصطلاحاً آن را گام می نامند. (در اولین هواپیمای برادر رایت ، تثبیت کننده افقی در جلوی بالها قرار گرفت. پس از واژه فرانسوی "اردک" چنین پیکربندی را canard می نامند).
در قسمت عقب بالها و تثبیت کننده ها قسمت های کوچکی متحرک قرار دارند که توسط لولاها به قسمتهای ثابت متصل می شوند. در شکل ، این بخشهای متحرک به رنگ قهوه ای رنگ هستند. تغییر قسمت عقب یک بال ، میزان نیرویی را که بال ایجاد می کند تغییر می دهد. توانایی تغییر نیرو وسیله ای برای کنترل و مانور هواپیما است. قسمت لولای تثبیت کننده عمودی را سکان می نامند. همانطور که از جلو بدنه مشاهده می شود ، برای منحرف کردن دم به چپ و راست استفاده می شود. قسمت لولای تثبیت کننده افقی را آسانسور می نامند. از آن برای منحرف کردن دم به بالا و پایین استفاده می شود. قسمت لولایی بال بال را aileron می نامند. از آن برای چرخاندن بالها از یک طرف به طرف دیگر استفاده می شود. با استفاده از اسپویلرها می توان اکثر هواپیماهای مسافربری را از این سو به آن رول کرد. اسپویلرها صفحات کوچکی هستند که برای ایجاد اختلال در جریان بال و تغییر مقدار نیرو با کاهش بالابر هنگام استقرار اسپویلر استفاده می شوند.
بالها دارای قسمتهای اضافی لولایی و عقب نزدیک بدنه هستند که فلپ نامیده می شوند. فلپ ها هنگام برخاستن و فرود آمدن به سمت پایین مستقر می شوند تا میزان نیروی تولید شده توسط بال را افزایش دهند. در برخی هواپیماها ، قسمت جلوی بال نیز منحرف می شود. اسلت ها هنگام برخاست و فرود برای تولید نیروی اضافی استفاده می شوند. از اسپویلرها در هنگام فرود برای کاهش سرعت هواپیما و مقابله با فلپ ها هنگام قرار گرفتن هواپیما روی زمین نیز استفاده می شود. دفعه بعدی که با هواپیما پرواز کردید ، به نحوه تغییر شکل بال در هنگام برخاست و فرود توجه کنید.
بدنه یا بدنه هواپیما ، تمام قطعات را در کنار هم نگه می دارد. خلبانان در کابین خلبان جلوی بدنه می نشینند. مسافران و بارها در عقب بدنه حمل می شوند. برخی هواپیماها سوخت را در بدنه حمل می کنند. دیگران سوخت را در بال می گیرند.
انواع دم
دم T شکل ( T-Tail )
دم های T شکل ( T-tail ) در واقع شکل تغییر یافته از ساختار مرسوم دم های می باشند. تفاوت دم های T شکل در قرار گیری تثبیت کننده و بخش افقی بر روی بخش عمودی است. معمولا تثبیت کننده افقی بالاتر از جریان عبوری عبوری هوای موتور ها ، ملخ ها و بال هواپیما قرار می گیرد که باعث بیشتر شدن بازدهی و راندمان تثبیت کننده افقی می شود همچنین این شکل ساختاری باعث بیشتر شدن آیرودینامیک تثبیت کننده عمودی و بالارفتن راندمان آن می شود. از این رو می توان دم هواپیما را کوچک تر و سبک تر ساخت که در کل باعث بالا رفتن راندمان پروازی هواپیما ها می شود.
استفاده از این نوع از دم معایبی را نیز دارد چراکه این ساختار باعث اعمال بار های پیچشی و خمشی بر روی بخش افقی می شود که در در دم های استاندارد این بار وجود ندارد.به دلیل این بار اضافی تحمیل شده این نوع از دم ها نیازمند ساختاری محکم تر و در نتیجه سنگین تر نسبت به مدل های استاندارد هستند.بیشترین فشار وارده بر روی بخش افقی دم در هنگام فرود هواپیما می باشد که ممکن است باعث خم شدن بیش از حد ثبیت کننده افقی دم شده و بخش افقی را وارد اشفتگی های جریان عبوری از بال ها کرده و کنترل هواپیما را برای خلبان سخت تر کند.اما با همه این تفاسیر دم های T شکل ( T-Tail ) دومین نوع از دم ها از لحاظ محبوبیت و کاربرد در بین سایر ساختار دم هواپیما ها می باشند.
دم صلیبی شکل ( Cruciform-Tail )
این نوع از ساختار دم هواپیما ها تلفیقی از دم های استاندارد و دم های T شکل هستند به این صورت که تثبیت کننده افقی در نیمه بالایی بخش عمودی قرار میگیرد و نه بروی آن. با این کار بخش افقی از معرض آشفتگی جریان بال ها و جریان عبوری موتور و ملخ ها خارج می شود و به بخش افقی نیز اجازه می دهد از جریان هوای عبوری بدون اختلالی استفاده کند. این کار به کنترل و هدایت هواپیما در چرخش ها کمک زیادی می کند.
دم های دوتایی ( Dual-Tail )
دم های دوتای نوع دیگری از ساختار دم هواپیما هستند. در این نوع طراحی دم ،تثبیت کننده افقی در قسمت انتهایی بدنه هواپیما نصب شده و دوتثبیت کننده عمودی در دو طرف انتهایی تثبیت کننده افقی قرار میگرد.این شکل از دم ها بیشتر در هواپیما های بمب افکن و هواپیما هایی که بر روی سطح آب فرود می آمدند و هواپیماه هایی با دو موتور بر روی بال استفاده می شد. به این دلیل که قرار گیری دو تثبیت کننده افقی در انتهای بخش افقی آن ها را در معرض جریان عبوری هوا از موتور ها قرار می دهد این کار باعث کنترل بهتر هنگام جهت دهی به هواپیما در سرعت های پایین می شود.
این نوع از ساختار باعث بالا رفتن راندامان پروازی شده و از این رو می توان بخش افقی بال را کوچک تر ، سبک تر و با بازدهی بیشتری ساخت.از جمل هواپیما هایی که از این نوع دم استفاه می کردند می توان به هواپیمای بمب افکن B-25 اشاره کرد.
دم های سه تایی ( Triple-Tail )
این نوع از دم ها ساختاری شبیه به دم های دوتایی دارند به این تفاوت که در این نوع از ساختار تثبیت کننده عمودی سومی نیز بر روی تثبیت کننده افقی قرار دارد. این مدل از دم ها را می توان در هواپیما هایی مانند هواپیمای مسافربری Lockheed Constellation مشاهده کرد.
دم های V شکل ( V-Tail )
دم های V شکل ( V-Tail ) دارای کاربرد محدودی در طراحی هواپیما ها می باشند. در این نوع از طراحی دو بخش اصلیه دم ها یعنی تثبیت کننده افقی و عمودی به صورت استاندارد و آن گونه که ما می شناسیم وجود ندارد و نها دو تثبیت کننده در انتهای بدنه و به شکل V قرار گرفته اند.در این نوع طراحی تثبیت کننده عمودی حذف شده است که باعث کاهش نیروی پسا در هنگام پرواز و سبک تر و کوچک تر شدن دم هواپیما می شود.همچنین تحقیقات انجام شده بر روی این نو از دم ها نشان داده که دم های V شکل می توانند پایداری هواپیما و هدایت کنترل آن را به اندازه دم های استاندارد تامین کنند.
از معایب استفاده از این نوع طراحی فرمان گیری های اضافه در هنگام دور زدن هواپیما است. هواپیما ها برای دور زدن می توانند از تثبیت کننده عمودی و فرمان Rudder استفاده کنند تا هواپیما به آرامی در محور YAW شروع به چرخیدن کند.اما در دم های V شکل به دلیل عدم وجود تثبیت کننده عمودی هواپیما برای مثال در هنگام چرخش به سمت چپ می بایست تثبیت کننده سمت راست به سمت بالا جرکت کرده و تثبیت کننده سمت چپ به سمت پایین حرکت کند.این کار باعث roll زدن هواپیما در مسیر اشتباهی شده و هواپیما را از مسیر خود دور می کند.
دم با شکل Y معکوس ( Inverted Y-Tail )
این نوع از طراحی شبیه به دم های استاندارد می باشد با این تفاوت که تثبیت کننده افقی آن از محل اتصال به بدنه کمی رو به پایین زاویه دارد. این کار برای دور کردن تثبیت کننده افقی از اشفتگی های جریان عبوری بال ها در زاویه حمله های زیاد مورد استفاده قرار می گیرد.
دم های دو قلو ( Twin-Tail )
دم های دوقلو ( Twin-Tail ) به عنوان آینده هواپیما های جنگنده نظیر F/A-18 Hornet محسوب می شود. این ساختار از دو تثبیت کننده افقی در کناره ها و دو تثبیت کننده عمودی در وسط تشکیل شده است.تثبیت کننده های عمودی در این نوع دم در واقع کاملا عمود نیستند و کمی زاویه دارند و ساختاری شبیه به دم های V شکل دارند.این نوع از دم ها کارایی و بازده بیشتری نسبت به دم های استاندارد دارند.
Boom-Tail
هواپیما های Boom-Tail در واقع هواپیما هایی هستند که بدنه آن ها به طور کامل تا دم عقبی بال ادامه پیدا نکرده است و بین بدنه اصلی و دم فضای خالی وجود دارد.هواپیما هایی با این نوع دم بیشتر برای هواپیما های بمب افکن و ترابری استفاده می شده چراکه در این نوع هواپیما دسترسی بیشتری به بدنه اصلی برای بارگیری و یا تخلیه بار وجود دارد. همچنین هواپیما هایی که برای پرواز از یک موتور عقبی در وسط بدنه و یا یک موتور عقب و یک موتور جلو در راستای یکدیگر استفاده می کنند بسیار مناسب است. از جمله این هواپیما ها می توان به هواپیما های سبک Cessna Skymaster و Adam 309 اشاره کرد.
دم های چند لایه ( Multiple-Plane Tail )
برخی هواپیما ها دارای دم عقبی با دو ردیف تثبیت کننده افقی و یا بیشتر بودند. این نوع از دم ها بیشتر در دوران جنگ جهانی اول و برای هواپیما های جنگنده استفاده می شده است..
ج: دم هواپیما چندین هدف را دنبال می کند ، اما هدف اصلی ایجاد ثبات برای هواپیما است ، به این معنی که اگر هواپیما در اثر وزش باد از مسیر خارج شود ، می تواند به موقعیت اصلی خود بازگردد. ... همچنین روی دم تثبیت کننده افقی یا "بال عقب" قرار دارد که کنترل کننده گام است
دم ( tail ) در هواپیما ها جزو بخش های مهم محسوب می شود چرا که وظیفه پایداری و هدایت هواپیما در محور های عمودی وافقی را در عقب هواپیما را بر عهده دارد. دم هواپیما بر اساس نوع کاربرد و شکل ظاهری هواپیما به شکل ها و گونه های مختلفی طراحی و ساخته می شوند و انواع مختلف دارند
دم هواپیما که به عنوان تثبیت کننده افقی نیز شناخته می شود ، یک سطح بالابر کوچک است که روی دم قرار دارد در پشت سطوح اصلی بالابر هواپیمای بال ثابت و همچنین هواپیماهای بال غیر ثابت دیگر مانند هلی کوپترها و هواپیماهای کوچک. همه هواپیماهای بال ثابت هواپیمای دم ندارند. کانارد ، هواپیماهای بدون دم و بال پروازی دارای هواپیمای دم جداگانه نیستند ، در حالی که در هواپیماهای دم V ، تثبیت کننده عمودی ، سکان و صفحه دم و آسانسور با هم ترکیب می شوند و به صورت دو سطح مورب در یک طرح V شکل می گیرند.دم در هواپیما ها چه کاربردی دارد؟
دم در هواپیما ها به دو منظور پایداری و هدایت در دو محور PITCH و YAW استفاده می شود.دم هواپیما ها از لحاظ ساختار به دو قسمت افقی و عمودی تقسیم بندی می شوند که قسمت افقی آن برای کنترل پایداری و هدایت هواپیما در محور YAW و قسمت عمودی برای هدایت و حفظ پایداری پهپاد در محور PITCH مورد استفاده قرار می گیرد. اما این ساختار یک ساختار ساده و استاندارد برای دم هواپیما ها است اما برای تمامی هواپیما ها یکسان نیست و دم در هواپیما ها دارای انواع و نوع ساخت مختلف با ویژگی های متفاوتی هستند.
به طور کلی انواع مختلف طراحی و ساخت دم در هواپیما ها را می توان به یازده دسته و به صورت زیر تقسیم بندی کرد:
conventional
T-tail
cruciform-tail
dual-tail
triple-tail
V-tail
inverted V-tail
inverted Y-tail
twin-tail
boom-tail
high boom-tail
multiple-plane tail
اکثریت انواع مختلف طراحی دم ها در هواپیما های امروزی را می توان در این یازده دسته جای داد اما اشکال و طراحی های نوین و خلاقانه دیگری نیز ممکن است وجود داشته باشد که در این یازده دسته قرار نگیرد.در ادامه به بررسی جداگانه هر یک از بخش های این یازده دسته می پردازیم.
دم با ساختار استاندارد ( Conventional Tail )
این نوع از دم ها با شکلی ساده و استاندارد جزو مرسوم ترین و محبوب ترین ساختار دم در هواپیما ها محسوب می شود و بسیاری از هواپیما های مسافربری و عمومی از این نوع دم استفاده می کنند. دم هایی با این نوع شکل ساختاری همانطور که در شکل زیر مشاهده می کنید دارای یک بخش عمودی و یک بخش افقی هستند که در انتهای بدنه هواپیما قرار میگیرد.
بخش عمودی برای کنترل و هدایت هواپیما در محور YAW قرار گرفته و بخش افقی آن نیز شامل دو قسمت جداگانه می باشد که هرکدام در یک سمت بخش عمودی قرار می گیرد و برای کنترل پهپاد در محور PITCH استفاده می شود. این نوع از دم هواپیما ها می توانند پایداری مناسب و هدایت قابل قبولی را در کنار وزن ساختاری پایین داشته باشند که ویژگی مهمی در طراحی هواپیما ها می باشد و از این رو است که محبوبیت زیادی را بین طراحان هواپیما پیدا کرده است.
وظیفه هواپیمای دم ایجاد ثبات و کنترل است. به طور خاص ، هواپیمای دم به شما کمک می کند تا بتواند در تغییر موقعیت مرکز فشار یا مرکز ثقل ناشی از تغییر در سرعت و نگرش ، مصرف سوخت ، یا انداختن بار یا محموله بارگیری شود
در هواپیمایی ، ضربه دم یا ضربه دم وقتی اتفاق می افتد که دم یا خوابگاه هواپیما به زمین یا جسم ثابت دیگری برخورد کند. این می تواند با یک هواپیمای بال ثابت با حمل و نقل سه چرخه اتفاق بیفتد ، در هر دو تیک آف که خلبان بینی را خیلی سریع به سمت بالا می چرخاند ، یا در فرود زمانی که خلبان هنگام نزدیک شدن به دماغ بینی خیلی بالا می آورد ، اغلب در تلاش برای فرود آمدن بیش از حد نزدیک به باند آستانه. این امر همچنین می تواند در هنگام عملیات هلی کوپتر نزدیک به زمین ، هنگامی که دم به طور ناخواسته به مانعی برخورد می کند ، رخ دهد.
یک حادثه خفیف ضربه گیر دم ممکن است به خودی خود خطرناک نباشد ، اما اگر قرار باشد در آینده از حادثه فاجعه بار جلوگیری شود ، هواپیما هنوز ضعیف شده و باید کاملاً مورد بازرسی و بازسازی قرار گیرد.چه عاملی باعث ایجاد ضربه دم می شود؟
ضربه دم همان اتفاقی است که در انتهای عقب بدنه هواپیما به زمین می خورد. علت معمول این است که زاویه حرکت هواپیما بیش از حد تند باشد ، گرچه ممکن است در هنگام فرود نیز رخ دهد
مزایای AT tail چیست؟
دم T باعث افزایش نسبت ابعاد موثر باله به دلیل اثر "صفحه انتهایی" می شود ، جایی که مجاورت یک سطح عمود (دم افقی و بدنه در این حالت) باعث بهبود کارایی آیرودینامیکی می شود زیرا کاهش فشار هوا در انتهای سرپوشیده کاهش می یابد از سطح بالابر ، ضریب حجم دم چیست؟
ضرایب حجم دم ، مساحت سطح ، فاصله آن منطقه از فاصله هواپیما ، ناحیه بال ، وتر بال آیرودینامیکی و دهانه بال را مرتبط می کند. هواپیماهایی که دارای ضرایب حجمی یکسان هستند دارای ویژگی های پایداری ایستایی مشابه هستند. دانستن این مسئله روند طراحی را آسان می کند.
.انتهای دم هواپیما چه نام دارد؟
برای کنترل و مانور هواپیما ، بالهای کوچکتر در انتهای هواپیما قرار دارند. دم معمولاً دارای یک قطعه افقی ثابت به نام تثبیت کننده افقی و یک قطعه عمودی ثابت به نام تثبیت کننده عمودی است.اعتصاب دم چگونه اتفاق می افتد؟
وقتی دم هواپیما هنگام برخاستن یا فرود آمدن به زمین برخورد می کند ، ضربه دم رخ می دهد. اگرچه بسیاری از ضربات دم در هنگام برخاست اتفاق می افتد ، اما بیشترین آنها در هنگام فرود رخ می دهد. ضربه دم اغلب به دلیل خطای انسانی است. ضربات دم باعث آسیب قابل توجهی به دیواره فشار می شود.
کدام دو قسمت دم هواپیما را تشکیل می دهد؟
دم معمولاً دارای یک قطعه افقی ثابت به نام تثبیت کننده افقی و یک قطعه عمودی ثابت به نام تثبیت کننده عمودی است. وظیفه تثبیت کننده ها ایجاد ثبات برای هواپیما و نگه داشتن آن در پرواز مستقیم است.قسمت دم هواپیما چیست؟
Empennage نامی است که به کل قسمت دم هواپیما اعم از تثبیت کننده های افقی و عمودی ، سکان و آسانسور داده می شود.برای کنترل و مانور هواپیما ، بالهای کوچکتر در انتهای هواپیما قرار دارند. دم معمولاً دارای یک قطعه افقی ثابت به نام تثبیت کننده افقی و یک قطعه عمودی ثابت به نام تثبیت کننده عمودی است. وظیفه تثبیت کننده ها ایجاد ثبات برای هواپیما و نگه داشتن آن در پرواز مستقیم است. تثبیت کننده عمودی باعث می شود دماغه هواپیما از یک طرف به آن طرف نچرخد که اصطلاحاً yaw نامیده می شود. تثبیت کننده افقی از حرکت بالا و پایین بینی جلوگیری می کند که اصطلاحاً آن را گام می نامند. (در اولین هواپیمای برادر رایت ، تثبیت کننده افقی در جلوی بالها قرار گرفت. پس از واژه فرانسوی "اردک" چنین پیکربندی را canard می نامند).
در قسمت عقب بالها و تثبیت کننده ها قسمت های کوچکی متحرک قرار دارند که توسط لولاها به قسمتهای ثابت متصل می شوند. در شکل ، این بخشهای متحرک به رنگ قهوه ای رنگ هستند. تغییر قسمت عقب یک بال ، میزان نیرویی را که بال ایجاد می کند تغییر می دهد. توانایی تغییر نیرو وسیله ای برای کنترل و مانور هواپیما است. قسمت لولای تثبیت کننده عمودی را سکان می نامند. همانطور که از جلو بدنه مشاهده می شود ، برای منحرف کردن دم به چپ و راست استفاده می شود. قسمت لولای تثبیت کننده افقی را آسانسور می نامند. از آن برای منحرف کردن دم به بالا و پایین استفاده می شود. قسمت لولایی بال بال را aileron می نامند. از آن برای چرخاندن بالها از یک طرف به طرف دیگر استفاده می شود. با استفاده از اسپویلرها می توان اکثر هواپیماهای مسافربری را از این سو به آن رول کرد. اسپویلرها صفحات کوچکی هستند که برای ایجاد اختلال در جریان بال و تغییر مقدار نیرو با کاهش بالابر هنگام استقرار اسپویلر استفاده می شوند.
بالها دارای قسمتهای اضافی لولایی و عقب نزدیک بدنه هستند که فلپ نامیده می شوند. فلپ ها هنگام برخاستن و فرود آمدن به سمت پایین مستقر می شوند تا میزان نیروی تولید شده توسط بال را افزایش دهند. در برخی هواپیماها ، قسمت جلوی بال نیز منحرف می شود. اسلت ها هنگام برخاست و فرود برای تولید نیروی اضافی استفاده می شوند. از اسپویلرها در هنگام فرود برای کاهش سرعت هواپیما و مقابله با فلپ ها هنگام قرار گرفتن هواپیما روی زمین نیز استفاده می شود. دفعه بعدی که با هواپیما پرواز کردید ، به نحوه تغییر شکل بال در هنگام برخاست و فرود توجه کنید.
بدنه یا بدنه هواپیما ، تمام قطعات را در کنار هم نگه می دارد. خلبانان در کابین خلبان جلوی بدنه می نشینند. مسافران و بارها در عقب بدنه حمل می شوند. برخی هواپیماها سوخت را در بدنه حمل می کنند. دیگران سوخت را در بال می گیرند.
انواع دم
دم T شکل ( T-Tail )
دم های T شکل ( T-tail ) در واقع شکل تغییر یافته از ساختار مرسوم دم های می باشند. تفاوت دم های T شکل در قرار گیری تثبیت کننده و بخش افقی بر روی بخش عمودی است. معمولا تثبیت کننده افقی بالاتر از جریان عبوری عبوری هوای موتور ها ، ملخ ها و بال هواپیما قرار می گیرد که باعث بیشتر شدن بازدهی و راندمان تثبیت کننده افقی می شود همچنین این شکل ساختاری باعث بیشتر شدن آیرودینامیک تثبیت کننده عمودی و بالارفتن راندمان آن می شود. از این رو می توان دم هواپیما را کوچک تر و سبک تر ساخت که در کل باعث بالا رفتن راندمان پروازی هواپیما ها می شود.
استفاده از این نوع از دم معایبی را نیز دارد چراکه این ساختار باعث اعمال بار های پیچشی و خمشی بر روی بخش افقی می شود که در در دم های استاندارد این بار وجود ندارد.به دلیل این بار اضافی تحمیل شده این نوع از دم ها نیازمند ساختاری محکم تر و در نتیجه سنگین تر نسبت به مدل های استاندارد هستند.بیشترین فشار وارده بر روی بخش افقی دم در هنگام فرود هواپیما می باشد که ممکن است باعث خم شدن بیش از حد ثبیت کننده افقی دم شده و بخش افقی را وارد اشفتگی های جریان عبوری از بال ها کرده و کنترل هواپیما را برای خلبان سخت تر کند.اما با همه این تفاسیر دم های T شکل ( T-Tail ) دومین نوع از دم ها از لحاظ محبوبیت و کاربرد در بین سایر ساختار دم هواپیما ها می باشند.
دم صلیبی شکل ( Cruciform-Tail )
این نوع از ساختار دم هواپیما ها تلفیقی از دم های استاندارد و دم های T شکل هستند به این صورت که تثبیت کننده افقی در نیمه بالایی بخش عمودی قرار میگیرد و نه بروی آن. با این کار بخش افقی از معرض آشفتگی جریان بال ها و جریان عبوری موتور و ملخ ها خارج می شود و به بخش افقی نیز اجازه می دهد از جریان هوای عبوری بدون اختلالی استفاده کند. این کار به کنترل و هدایت هواپیما در چرخش ها کمک زیادی می کند.
دم های دوتایی ( Dual-Tail )
دم های دوتای نوع دیگری از ساختار دم هواپیما هستند. در این نوع طراحی دم ،تثبیت کننده افقی در قسمت انتهایی بدنه هواپیما نصب شده و دوتثبیت کننده عمودی در دو طرف انتهایی تثبیت کننده افقی قرار میگرد.این شکل از دم ها بیشتر در هواپیما های بمب افکن و هواپیما هایی که بر روی سطح آب فرود می آمدند و هواپیماه هایی با دو موتور بر روی بال استفاده می شد. به این دلیل که قرار گیری دو تثبیت کننده افقی در انتهای بخش افقی آن ها را در معرض جریان عبوری هوا از موتور ها قرار می دهد این کار باعث کنترل بهتر هنگام جهت دهی به هواپیما در سرعت های پایین می شود.
این نوع از ساختار باعث بالا رفتن راندامان پروازی شده و از این رو می توان بخش افقی بال را کوچک تر ، سبک تر و با بازدهی بیشتری ساخت.از جمل هواپیما هایی که از این نوع دم استفاه می کردند می توان به هواپیمای بمب افکن B-25 اشاره کرد.
دم های سه تایی ( Triple-Tail )
این نوع از دم ها ساختاری شبیه به دم های دوتایی دارند به این تفاوت که در این نوع از ساختار تثبیت کننده عمودی سومی نیز بر روی تثبیت کننده افقی قرار دارد. این مدل از دم ها را می توان در هواپیما هایی مانند هواپیمای مسافربری Lockheed Constellation مشاهده کرد.
دم های V شکل ( V-Tail )
دم های V شکل ( V-Tail ) دارای کاربرد محدودی در طراحی هواپیما ها می باشند. در این نوع از طراحی دو بخش اصلیه دم ها یعنی تثبیت کننده افقی و عمودی به صورت استاندارد و آن گونه که ما می شناسیم وجود ندارد و نها دو تثبیت کننده در انتهای بدنه و به شکل V قرار گرفته اند.در این نوع طراحی تثبیت کننده عمودی حذف شده است که باعث کاهش نیروی پسا در هنگام پرواز و سبک تر و کوچک تر شدن دم هواپیما می شود.همچنین تحقیقات انجام شده بر روی این نو از دم ها نشان داده که دم های V شکل می توانند پایداری هواپیما و هدایت کنترل آن را به اندازه دم های استاندارد تامین کنند.
از معایب استفاده از این نوع طراحی فرمان گیری های اضافه در هنگام دور زدن هواپیما است. هواپیما ها برای دور زدن می توانند از تثبیت کننده عمودی و فرمان Rudder استفاده کنند تا هواپیما به آرامی در محور YAW شروع به چرخیدن کند.اما در دم های V شکل به دلیل عدم وجود تثبیت کننده عمودی هواپیما برای مثال در هنگام چرخش به سمت چپ می بایست تثبیت کننده سمت راست به سمت بالا جرکت کرده و تثبیت کننده سمت چپ به سمت پایین حرکت کند.این کار باعث roll زدن هواپیما در مسیر اشتباهی شده و هواپیما را از مسیر خود دور می کند.
دم با شکل Y معکوس ( Inverted Y-Tail )
این نوع از طراحی شبیه به دم های استاندارد می باشد با این تفاوت که تثبیت کننده افقی آن از محل اتصال به بدنه کمی رو به پایین زاویه دارد. این کار برای دور کردن تثبیت کننده افقی از اشفتگی های جریان عبوری بال ها در زاویه حمله های زیاد مورد استفاده قرار می گیرد.
دم های دو قلو ( Twin-Tail )
دم های دوقلو ( Twin-Tail ) به عنوان آینده هواپیما های جنگنده نظیر F/A-18 Hornet محسوب می شود. این ساختار از دو تثبیت کننده افقی در کناره ها و دو تثبیت کننده عمودی در وسط تشکیل شده است.تثبیت کننده های عمودی در این نوع دم در واقع کاملا عمود نیستند و کمی زاویه دارند و ساختاری شبیه به دم های V شکل دارند.این نوع از دم ها کارایی و بازده بیشتری نسبت به دم های استاندارد دارند.
Boom-Tail
هواپیما های Boom-Tail در واقع هواپیما هایی هستند که بدنه آن ها به طور کامل تا دم عقبی بال ادامه پیدا نکرده است و بین بدنه اصلی و دم فضای خالی وجود دارد.هواپیما هایی با این نوع دم بیشتر برای هواپیما های بمب افکن و ترابری استفاده می شده چراکه در این نوع هواپیما دسترسی بیشتری به بدنه اصلی برای بارگیری و یا تخلیه بار وجود دارد. همچنین هواپیما هایی که برای پرواز از یک موتور عقبی در وسط بدنه و یا یک موتور عقب و یک موتور جلو در راستای یکدیگر استفاده می کنند بسیار مناسب است. از جمله این هواپیما ها می توان به هواپیما های سبک Cessna Skymaster و Adam 309 اشاره کرد.
دم های چند لایه ( Multiple-Plane Tail )
برخی هواپیما ها دارای دم عقبی با دو ردیف تثبیت کننده افقی و یا بیشتر بودند. این نوع از دم ها بیشتر در دوران جنگ جهانی اول و برای هواپیما های جنگنده استفاده می شده است..
-
rohamavation
نام: roham hesami radرهام حسامی راد
محل اقامت: 100 مایلی شمال لندن جاده آیلستون، لستر، لسترشر. LE2
عضویت : سهشنبه ۱۳۹۹/۸/۲۰ - ۰۸:۳۴
پست: 3278-
سپاس: 5494
- جنسیت:
تماس:
Re: هوافضا
.شرح
Canardیا پیش بال یک سطح افقی سوار بر بدنه است کانارد در واقع همان سکان افقی است که از پشت بال به جلوی آن انتقال یافته است. که برای تأمین پایداری و کنترل طولی به جلو از بال اصلی قرار دارد. بسته به نصب ، ممکن است یک سطح هندسی ثابت ، متحرک یا متغیر باشد و ممکن است سطوح کنترل را در بر نگیرد.
نوعی بالچه در قسمت جلوی هواپیماست که در هواپیماهایی چون یوروفایتر و رافال دیده میشود. کانارد ها دو هدف دارند: بهتر کردن و بهبود قابلیت کنترل و مهار هواپیما و همچنین کمک به افزایش نیروی لیفت و جایگزینی تثبیت کننده افقی یا همان بالچه سوار بر دم و در آخر کاهش نیروی درگ.
چگونگی کاهش درگ در کانارد بدین شکل است که کانارد میزان نیروی لیفت که هواپیما نیاز به تولید دارد را کاهش میدهد که موجب کاهش درگ میشود.اما در عوض یک کانارد میتواند باعث از بین رفتن ثبات و همچنین کاهش قدرت بازیابی از استال(واماندگی) شود
یک کانارد ممکن است به دلایل مختلف از جمله تولید بالابر ، کنترل گام ، پایداری طولی و اصلاح یا برای اصلاح جریان هوا بر روی بال اصلی در طراحی هواپیما گنجانده شود. دو کلاس اصلی طراحی برای پیکربندی canard بالابر-canard و کنترل-canard هستند.اما یک نقطه ضعف وجود دارد: بال باید نیروی لیفت کافی برای مقابله با وزن و همچنین نیروی رو به پایین دم تولید کند که این لیفت اضافه که صرف خنثی کردن نیروی دم میشود خود باعث تولید درگ و در نتیجه کاهش کیفیت و کارکرد هواپیما میشودکانارد در واقع این بالچه افقی را از روی دم به سوی نوک هواپیما میبرد و مرکز لیفت بال را پشت مرکز سقل قرار میدهد. به منظور بالانس کردن تمایل نوک هواپیما برای پایین رفتن کانارد نیروی لیفت رو به بالا تولید میکند که به بال در مقابله با وزن کمک میکند.در نتیجه درگ کاهش و کیفیت افزایش میابد.سکان افقی کارش چیست؟
اگر سکان افقی نباشد هواپیما قادر به پرواز ثابت و پایدار افقی نیست زیرا دماغه آن به سمت پایین متمایل می شود (نیروی بالابرنده بال باعث پایین امدن دماغه هواپیما می شود). سکان افقی با ایجاد یک نیروی به طرف پایین باعث بالا رفتن دماغه و امکان پرواز افقی پایدار برای هواپیما می شود.
کانارد بجای سکان افقی
بعدها این فکر به ذهن طراحان خطور کرد که چرا سکان افقی را به جلوی بال منتقل نکنیم در این صورت بجای نیروی رو به پایین باید نیروی رو به بالا برای تعادل هواپیما تولید شود و این خود یک نیروی بالا برنده اضافه برای پرواز ایجاد میکند و راندمان طرح را بالا میبرد درحالیکه سکان افقی در پشت بال نه تنها نیروی بالابرنده تولید نمی کند بلکه با ایجاد نیروی رو به پایین باعث اتلاف در نیروی بالابرنده بال نیز میشود و این تفکر عامل بکارگیری کانارد شد.
هواپیماهای بال دلتا که نه سکان افقی دارند و نه کانارد چگونه مشکل پایین امدن دماغه را حل می کنند؟
در این هواپیماها با انتقال بال به انتهای بدنه مرکز ثقل نیروی بالابرنده را تغییر می دهند و دماغه بالا می اید و نیازی به سکان افقی نیست م مانند جنگنده اف 16 ان را مثبت کرد که باعث بالا رفتن دماغه می شود و سکان افقی در اف 16 برعکس عمل می کند چون نیروی رو به بالا ایجاد می کند تا دماغه پایین بیاید).
یک کانارد بالابرنده در Rutan Long-EZ
پیکربندی lifting-canard به گونه ای است که در آن وزن هواپیما بین بال و کانارد تقسیم می شود. یک کانارد بالابرنده یک بارگذاری یا بالابر مثبت ایجاد می کند که در مقابل یک تثبیت کننده افقی معمولی است که باعث ایجاد منفی می شود. به نظر می رسد این ویژگی این امکان را دارد که به طراحی اجازه دهد یک بال اصلی کوچکتر را در خود جای دهد. با این حال ، همانطور که هم ثبات گام و هم توانایی بازیابی اصطبل حکم می کند که کانارد قبل از بال اصلی بایستد ، توانایی بالابندی کامل بال را نمی توان نتیجه داد و در نتیجه نیاز به یک بال اصلی است که در واقع بزرگتر از آن است که برای یک معمولی مورد نیاز است. هواپیمای پیکربندی
کانارد کنترل در یوروفایتر تایفون هنگام پرواز
در طراحی کنترل-کانارد ، تقریباً تمام وزن هواپیما توسط بال حمل می شود و از کانارد در درجه اول برای کنترل گام در هنگام مانور استفاده می شود. به عبارت دیگر ، کنترل-کانارد عمدتا یک سطح کنترل است و معمولاً در زاویه حمله صفر است.
در برخی از هواپیماهای جنگی مانند یوروفایتر ، از كناردارد برای كنترل عمدی هواپیما استفاده می شود تا قابلیت مانور بیشتری داشته باشد. در این حالت ، سیستم های کنترل پرواز الکترونیکی از عملکرد کنترل گام کانارد برای ایجاد ثبات استاتیک و دینامیکی مصنوعی استفاده می کنند.
چرا از کانارد استفاده می شود؟
Canards بخشی از هواپیما است که به عنوان تثبیت کننده یا آسانسور عمل می کند و در مقابل بال اصلی نصب می شود. از یک کانارد به چندین دلیل مانند افزایش نیروی بلند کردن ، پایداری کنترل های هواپیما و تغییرات جریان بر روی بال اصلی استفاده می شود.
کانارد های جلویی چه کاری انجام می دهند؟
به زبان ساده ، کانارد ، که به آنها "هواپیمای غواصی" نیز گفته می شود ، بال های مثلثی کوچکی هستند که به سپر جلوی ماشین متصل می شوند تا اندکی آیرودینامیک خودرو را تغییر دهند. ... اولین راه این است که کانارد جریان هوای پیش رو را به سمت بالا هدایت می کند ، که به نوبه خود باعث ایجاد فشار رو به پایین بر روی کانارد می شود.
آشنایی با Canard
شاید خیلیها فکر میکنند که سکان افقی فقط در انتهای هواپیما قرار میگیرد ولی جالب است که بدانید در بعضی از هواپیماها سکان افقی در جلوی هواپیما نصب میشود.Canard در اصل دم افقی شما را به سمت بینی حرکت می دهد و مرکز بال بال را در پشت مرکز ثقل قرار می دهد. برای ایجاد تعادل بین گرایش طبیعی به پایین بینی ، گیاه کندر یک نیروی بلند کننده به سمت بالا ایجاد می کند - که به مقابله با وزن کمک می کندکانارد در هواپیما چگونه کار می کند؟
Canard یک سطح افقی سوار بر بدنه است که برای تأمین پایداری و کنترل طولی به جلو از بال اصلی قرار دارد. بسته به نصب ، ممکن است یک سطح هندسی ثابت ، متحرک یا متغیر باشد و ممکن است سطوح کنترل را در بر نگیرد.هواپیما به سبک کانارد چیست؟
Canard یک آرایش هوانوردی است که در آن یک بالگرد جلو یا جلو از بال اصلی هواپیمای بال ثابت قرار می گیرد. اصطلاح "canard" ممکن است برای توصیف خود هواپیما ، پیکربندی بال یا هواپیمای قبلی استفاده شود.آیا کانارد واقعا کار می کند؟
کانارد به دو روش مختلف به تولید نیروی رو به پایین کمک می کند. ... متاسفانه ، کانارد بسیار کارآمد نیست ، زیرا گرداب های قوی و موقعیت کانارد مقدار قابل توجهی کشش ایجاد می کند. آنها برای تنظیم دقیق تعادل آیرودینامیکی مفیدتر هستند.
دم هواپیما وظیفه ایجاد تعادل و پایداری طولی و عرضی هواپیما را دارد و شامل سکان عمودی و سکان افقی است.
یک هواپیما برای پروازی امن باید حول محورهایش تعادل داشته باشد، معنی این حرف آن است که برآیند کلیه نیروهایی که به هواپیما وارد میشود نباید حول مرکز جرم آن، گشتاور ایجاد کند. بدون وجود سکان افقی، تنها با یک ترکیب خاصی از سرعت و مرکز جرم هواپیما، تعادل هواپیما حفظ میشود. سکان افقی یک نیروی متعادلکننده اعمال میکند که باعث میشود در صورت تغییر محل مرکز جرم و تغییر سرعت، هواپیما همچنان بتواند تعادل خود را حفظ کند. از آنجایی که دم افقی در فاصله نسبتا زیادی از مرکز جرم قرار دارد، میتواند گشتاور بزرگی در مرکز جرم ایجاد کند. چنانچه هواپیمایی بال داشته باشد ولی فاقد دم باشد، از نظر جانبی متعادل است اما از نظر طولی ناپایدار خواهد بود؛ یعنی هر اغتشاشی که تمایل به بالا بردن دماغه هواپیما داشته باشد، یک گشتاور بالا برنده دماغه ایجاد میکند که آن خود تمایل به بیشتر بالا بردن دماغه خواهد داشت. با اضافه کردن دم به انتهای هواپیما، دم یک گشتاور پایین آورنده دماغه ایجاد میکند؛ لذا خاصیت نامتعادلکنندگی بال از بین میرود و هواپیما از نظر طولی متعادل میشود.
اما دم افقی نصب شده در جلوی بدنه چیست؟
کانارد در هواپیماهای مختلفی استفاده میشود اما در هواپیماهای بال دلتا رایجتر است و در هواپیماهای بالمثلثی بدون دم، وجود کانارد ضروری است. هواپیماهای نظامی بسیار سریع، پرتوان و مدرن همچون جنگندههای اروپایی ساب ۳۹ گریپن، ساب ۳۷ ویگن، داسو رافال، یوروفایتر و خانواده هواپیماهای سوخو 30 روسیه از کانارد برای بهبود مانورپذیری و پایداری خود استفاده میکنند. در میان بمبافکنها نیز، B1 لنسر آمریکایی و بمب افکن روسی توپولف ۱۶۰ از نمونههای شاخص هواپیماهای کانارد هستند.
ناگفته نماند که ترکیب بال دلتا و کانارد باعث میشود تا هواپیما از توانایی نشست و برخاست بالایی برخوردار باشند. هنگام فرود، کاناردها با چرخیدن به سمت جلو دماغه هواپیما و در نتیجه چرخ جلو را به پایین فشار داده و کارایی ترمز هواپیما را بالا میبرند. همچنین بعد از فرود از کاناردها به عنوان سطوح کاهنده سرعت برای کاهش مسافت ترمز استفاده میشود.
از کانارد در هواپیماهای مسافربری نیز استفاده شده است، مهمترین هواپیمای مسافربری مجهز به کانارد توپولف Tu144 بود که وجه تمایز اصلی آن با کنکورد وجود دو بالچه در اطراف دماغه هواپیما بود.
کنترل کانارد هواپیما
کنترل کاناردهای متحرک مکانیزم پیچیدهای دارد و اگر در زمان نامناسب تغییر حالت پیدا کنند به راحتی باعث استال موتور هواپیما میشوند به همین دلیل در بیشتر مواقع کاناردها به وسیله کامپیوتر مرکزی کنترل میشوند، البته خلبان میتواند در صورت نیاز به صورت دستی این کار را انجام دهد.
نحوه کنترل و تغییر حالت کانارد دقیقا مانند کنترل سکان افقی انتهای هواپیما میباشد.
آیا یک کاناردلیفت تولید می کند؟
Canard در اصل دم افقی شما را به سمت بینی حرکت می دهد و مرکز بال بال را در پشت مرکز ثقل قرار می دهد. برای ایجاد تعادل بین گرایش طبیعی به پایین بینی ، گیاه کندر یک نیروی بلند کننده به سمت بالا ایجاد می کند - که به مقابله با وزن کمک می کند
Canardیا پیش بال یک سطح افقی سوار بر بدنه است کانارد در واقع همان سکان افقی است که از پشت بال به جلوی آن انتقال یافته است. که برای تأمین پایداری و کنترل طولی به جلو از بال اصلی قرار دارد. بسته به نصب ، ممکن است یک سطح هندسی ثابت ، متحرک یا متغیر باشد و ممکن است سطوح کنترل را در بر نگیرد.
نوعی بالچه در قسمت جلوی هواپیماست که در هواپیماهایی چون یوروفایتر و رافال دیده میشود. کانارد ها دو هدف دارند: بهتر کردن و بهبود قابلیت کنترل و مهار هواپیما و همچنین کمک به افزایش نیروی لیفت و جایگزینی تثبیت کننده افقی یا همان بالچه سوار بر دم و در آخر کاهش نیروی درگ.
چگونگی کاهش درگ در کانارد بدین شکل است که کانارد میزان نیروی لیفت که هواپیما نیاز به تولید دارد را کاهش میدهد که موجب کاهش درگ میشود.اما در عوض یک کانارد میتواند باعث از بین رفتن ثبات و همچنین کاهش قدرت بازیابی از استال(واماندگی) شود
یک کانارد ممکن است به دلایل مختلف از جمله تولید بالابر ، کنترل گام ، پایداری طولی و اصلاح یا برای اصلاح جریان هوا بر روی بال اصلی در طراحی هواپیما گنجانده شود. دو کلاس اصلی طراحی برای پیکربندی canard بالابر-canard و کنترل-canard هستند.اما یک نقطه ضعف وجود دارد: بال باید نیروی لیفت کافی برای مقابله با وزن و همچنین نیروی رو به پایین دم تولید کند که این لیفت اضافه که صرف خنثی کردن نیروی دم میشود خود باعث تولید درگ و در نتیجه کاهش کیفیت و کارکرد هواپیما میشودکانارد در واقع این بالچه افقی را از روی دم به سوی نوک هواپیما میبرد و مرکز لیفت بال را پشت مرکز سقل قرار میدهد. به منظور بالانس کردن تمایل نوک هواپیما برای پایین رفتن کانارد نیروی لیفت رو به بالا تولید میکند که به بال در مقابله با وزن کمک میکند.در نتیجه درگ کاهش و کیفیت افزایش میابد.سکان افقی کارش چیست؟
اگر سکان افقی نباشد هواپیما قادر به پرواز ثابت و پایدار افقی نیست زیرا دماغه آن به سمت پایین متمایل می شود (نیروی بالابرنده بال باعث پایین امدن دماغه هواپیما می شود). سکان افقی با ایجاد یک نیروی به طرف پایین باعث بالا رفتن دماغه و امکان پرواز افقی پایدار برای هواپیما می شود.
کانارد بجای سکان افقی
بعدها این فکر به ذهن طراحان خطور کرد که چرا سکان افقی را به جلوی بال منتقل نکنیم در این صورت بجای نیروی رو به پایین باید نیروی رو به بالا برای تعادل هواپیما تولید شود و این خود یک نیروی بالا برنده اضافه برای پرواز ایجاد میکند و راندمان طرح را بالا میبرد درحالیکه سکان افقی در پشت بال نه تنها نیروی بالابرنده تولید نمی کند بلکه با ایجاد نیروی رو به پایین باعث اتلاف در نیروی بالابرنده بال نیز میشود و این تفکر عامل بکارگیری کانارد شد.
هواپیماهای بال دلتا که نه سکان افقی دارند و نه کانارد چگونه مشکل پایین امدن دماغه را حل می کنند؟
در این هواپیماها با انتقال بال به انتهای بدنه مرکز ثقل نیروی بالابرنده را تغییر می دهند و دماغه بالا می اید و نیازی به سکان افقی نیست م مانند جنگنده اف 16 ان را مثبت کرد که باعث بالا رفتن دماغه می شود و سکان افقی در اف 16 برعکس عمل می کند چون نیروی رو به بالا ایجاد می کند تا دماغه پایین بیاید).
یک کانارد بالابرنده در Rutan Long-EZ
پیکربندی lifting-canard به گونه ای است که در آن وزن هواپیما بین بال و کانارد تقسیم می شود. یک کانارد بالابرنده یک بارگذاری یا بالابر مثبت ایجاد می کند که در مقابل یک تثبیت کننده افقی معمولی است که باعث ایجاد منفی می شود. به نظر می رسد این ویژگی این امکان را دارد که به طراحی اجازه دهد یک بال اصلی کوچکتر را در خود جای دهد. با این حال ، همانطور که هم ثبات گام و هم توانایی بازیابی اصطبل حکم می کند که کانارد قبل از بال اصلی بایستد ، توانایی بالابندی کامل بال را نمی توان نتیجه داد و در نتیجه نیاز به یک بال اصلی است که در واقع بزرگتر از آن است که برای یک معمولی مورد نیاز است. هواپیمای پیکربندی
کانارد کنترل در یوروفایتر تایفون هنگام پرواز
در طراحی کنترل-کانارد ، تقریباً تمام وزن هواپیما توسط بال حمل می شود و از کانارد در درجه اول برای کنترل گام در هنگام مانور استفاده می شود. به عبارت دیگر ، کنترل-کانارد عمدتا یک سطح کنترل است و معمولاً در زاویه حمله صفر است.
در برخی از هواپیماهای جنگی مانند یوروفایتر ، از كناردارد برای كنترل عمدی هواپیما استفاده می شود تا قابلیت مانور بیشتری داشته باشد. در این حالت ، سیستم های کنترل پرواز الکترونیکی از عملکرد کنترل گام کانارد برای ایجاد ثبات استاتیک و دینامیکی مصنوعی استفاده می کنند.
چرا از کانارد استفاده می شود؟
Canards بخشی از هواپیما است که به عنوان تثبیت کننده یا آسانسور عمل می کند و در مقابل بال اصلی نصب می شود. از یک کانارد به چندین دلیل مانند افزایش نیروی بلند کردن ، پایداری کنترل های هواپیما و تغییرات جریان بر روی بال اصلی استفاده می شود.
کانارد های جلویی چه کاری انجام می دهند؟
به زبان ساده ، کانارد ، که به آنها "هواپیمای غواصی" نیز گفته می شود ، بال های مثلثی کوچکی هستند که به سپر جلوی ماشین متصل می شوند تا اندکی آیرودینامیک خودرو را تغییر دهند. ... اولین راه این است که کانارد جریان هوای پیش رو را به سمت بالا هدایت می کند ، که به نوبه خود باعث ایجاد فشار رو به پایین بر روی کانارد می شود.
آشنایی با Canard
شاید خیلیها فکر میکنند که سکان افقی فقط در انتهای هواپیما قرار میگیرد ولی جالب است که بدانید در بعضی از هواپیماها سکان افقی در جلوی هواپیما نصب میشود.Canard در اصل دم افقی شما را به سمت بینی حرکت می دهد و مرکز بال بال را در پشت مرکز ثقل قرار می دهد. برای ایجاد تعادل بین گرایش طبیعی به پایین بینی ، گیاه کندر یک نیروی بلند کننده به سمت بالا ایجاد می کند - که به مقابله با وزن کمک می کندکانارد در هواپیما چگونه کار می کند؟
Canard یک سطح افقی سوار بر بدنه است که برای تأمین پایداری و کنترل طولی به جلو از بال اصلی قرار دارد. بسته به نصب ، ممکن است یک سطح هندسی ثابت ، متحرک یا متغیر باشد و ممکن است سطوح کنترل را در بر نگیرد.هواپیما به سبک کانارد چیست؟
Canard یک آرایش هوانوردی است که در آن یک بالگرد جلو یا جلو از بال اصلی هواپیمای بال ثابت قرار می گیرد. اصطلاح "canard" ممکن است برای توصیف خود هواپیما ، پیکربندی بال یا هواپیمای قبلی استفاده شود.آیا کانارد واقعا کار می کند؟
کانارد به دو روش مختلف به تولید نیروی رو به پایین کمک می کند. ... متاسفانه ، کانارد بسیار کارآمد نیست ، زیرا گرداب های قوی و موقعیت کانارد مقدار قابل توجهی کشش ایجاد می کند. آنها برای تنظیم دقیق تعادل آیرودینامیکی مفیدتر هستند.
دم هواپیما وظیفه ایجاد تعادل و پایداری طولی و عرضی هواپیما را دارد و شامل سکان عمودی و سکان افقی است.
یک هواپیما برای پروازی امن باید حول محورهایش تعادل داشته باشد، معنی این حرف آن است که برآیند کلیه نیروهایی که به هواپیما وارد میشود نباید حول مرکز جرم آن، گشتاور ایجاد کند. بدون وجود سکان افقی، تنها با یک ترکیب خاصی از سرعت و مرکز جرم هواپیما، تعادل هواپیما حفظ میشود. سکان افقی یک نیروی متعادلکننده اعمال میکند که باعث میشود در صورت تغییر محل مرکز جرم و تغییر سرعت، هواپیما همچنان بتواند تعادل خود را حفظ کند. از آنجایی که دم افقی در فاصله نسبتا زیادی از مرکز جرم قرار دارد، میتواند گشتاور بزرگی در مرکز جرم ایجاد کند. چنانچه هواپیمایی بال داشته باشد ولی فاقد دم باشد، از نظر جانبی متعادل است اما از نظر طولی ناپایدار خواهد بود؛ یعنی هر اغتشاشی که تمایل به بالا بردن دماغه هواپیما داشته باشد، یک گشتاور بالا برنده دماغه ایجاد میکند که آن خود تمایل به بیشتر بالا بردن دماغه خواهد داشت. با اضافه کردن دم به انتهای هواپیما، دم یک گشتاور پایین آورنده دماغه ایجاد میکند؛ لذا خاصیت نامتعادلکنندگی بال از بین میرود و هواپیما از نظر طولی متعادل میشود.
اما دم افقی نصب شده در جلوی بدنه چیست؟
کانارد در هواپیماهای مختلفی استفاده میشود اما در هواپیماهای بال دلتا رایجتر است و در هواپیماهای بالمثلثی بدون دم، وجود کانارد ضروری است. هواپیماهای نظامی بسیار سریع، پرتوان و مدرن همچون جنگندههای اروپایی ساب ۳۹ گریپن، ساب ۳۷ ویگن، داسو رافال، یوروفایتر و خانواده هواپیماهای سوخو 30 روسیه از کانارد برای بهبود مانورپذیری و پایداری خود استفاده میکنند. در میان بمبافکنها نیز، B1 لنسر آمریکایی و بمب افکن روسی توپولف ۱۶۰ از نمونههای شاخص هواپیماهای کانارد هستند.
ناگفته نماند که ترکیب بال دلتا و کانارد باعث میشود تا هواپیما از توانایی نشست و برخاست بالایی برخوردار باشند. هنگام فرود، کاناردها با چرخیدن به سمت جلو دماغه هواپیما و در نتیجه چرخ جلو را به پایین فشار داده و کارایی ترمز هواپیما را بالا میبرند. همچنین بعد از فرود از کاناردها به عنوان سطوح کاهنده سرعت برای کاهش مسافت ترمز استفاده میشود.
از کانارد در هواپیماهای مسافربری نیز استفاده شده است، مهمترین هواپیمای مسافربری مجهز به کانارد توپولف Tu144 بود که وجه تمایز اصلی آن با کنکورد وجود دو بالچه در اطراف دماغه هواپیما بود.
کنترل کانارد هواپیما
کنترل کاناردهای متحرک مکانیزم پیچیدهای دارد و اگر در زمان نامناسب تغییر حالت پیدا کنند به راحتی باعث استال موتور هواپیما میشوند به همین دلیل در بیشتر مواقع کاناردها به وسیله کامپیوتر مرکزی کنترل میشوند، البته خلبان میتواند در صورت نیاز به صورت دستی این کار را انجام دهد.
نحوه کنترل و تغییر حالت کانارد دقیقا مانند کنترل سکان افقی انتهای هواپیما میباشد.
آیا یک کاناردلیفت تولید می کند؟
Canard در اصل دم افقی شما را به سمت بینی حرکت می دهد و مرکز بال بال را در پشت مرکز ثقل قرار می دهد. برای ایجاد تعادل بین گرایش طبیعی به پایین بینی ، گیاه کندر یک نیروی بلند کننده به سمت بالا ایجاد می کند - که به مقابله با وزن کمک می کند