قسمت دوم
راه حل تحلیلی
روش براکیستوکرون برنولی مستقیم
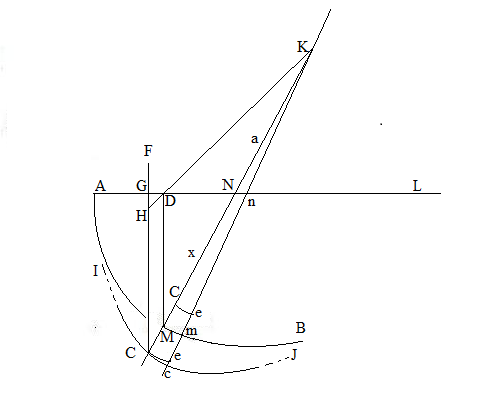
جسمی به صورت لغزشی در امتداد هر قوس دایره ای کوچک Ce بین شعاع KC و Ke در نظر گرفته می شود که مرکز K ثابت است. اولین مرحله اثبات شامل یافتن قوس دایره ای خاص، Mm است که جسم در کمترین زمان از آن عبور می کند.
خط KNC AL را در N قطع می کند، و خط Kne آن را در n قطع می کند، و آنها یک زاویه کوچک CKe در K ایجاد می کنند. اجازه دهید NK = a، و یک نقطه متغیر، C در KN گسترش یافته تعریف کنید. از بین تمام کمانهای دایرهای Ce، باید کمان Mm را پیدا کرد، که حداقل زمان برای لغزش بین 2 شعاع، KM و Km نیاز دارد. .
اجازه دهید MN = x. او m را طوری تعریف می کند که MD = mx، و n را طوری تعریف می کند که Mm = nx + na و توجه می کند که x تنها متغیر است و m متناهی و n بی نهایت کوچک است. زمان کمی برای سفر در امتداد قوس Mm است
${\displaystyle {\frac {Mm}{MD^{\frac {1}{2}}}}={\frac {n(x+a)}{(mx)^{\frac {1}{2}}}}}$ که باید حداقل باشد او توضیح نمی دهد که چون Mm بسیار کوچک است، سرعت در امتداد آن را می توان سرعت در M فرض کرد، که به عنوان جذر MD، فاصله عمودی M زیر خط افقی AL است.
از این پس، زمانی که متمایز می شود این باید بدهد
${\displaystyle {\frac {(x-a)dx}{2x^{\frac {3}{2}}}}=0} $ به طوری که x = a.
این حالت منحنی را مشخص می کند که جسم در کوتاه ترین زمان ممکن روی آن می لغزد. برای هر نقطه، M روی منحنی، شعاع انحنا، MK توسط محور AL آن به 2 قسمت مساوی بریده می شود. این خاصیت که برنولی می گوید برای مدت طولانی شناخته شده بود، منحصر به سیکلوئید است.
در نهایت، او حالت کلیتری را در نظر میگیرد که در آن سرعت یک تابع دلخواه X(x) است، بنابراین زمان کمینهسازی برابر است.
${\displaystyle {\frac {(x+a)}{X}}}$. سپس شرط حداقل می شود
${\displaystyle X={\frac {(x+a)dX}{dx}}}$ که او چنین می نویسد:${\displaystyle X=(x+a)\Delta x}$ و MN (=x) را به عنوان تابعی از NK (= a) می دهد. از این معادله منحنی را می توان از حساب انتگرال به دست آورد، اگرچه او این را نشان نمی دهد.
فرض کنید AMmB بخشی از سیکلوئید است که A به B را میپیوندد، که جسم در کمترین زمان به پایین میلغزد. بگذارید ICcJ بخشی از یک منحنی متفاوت باشد که A به B را میپیوندد، که میتواند به AL نزدیکتر از AmmB باشد. اگر کمان Mm زاویه MKm را در مرکز انحنای خود، K، فرعی میکند، بگذارید قوس روی IJ که همان زاویه را میگیرد Cc باشد. قوس دایره ای از طریق C با مرکز K Ce است. نقطه D در AL به صورت عمودی بالای M است. K را به D وصل کنید و نقطه H جایی است که CG KD را قطع می کند، در صورت لزوم گسترش می یابد.
اجازه دهید$tau$ و t به ترتیب زمان هایی هستند کهجسم در امتداد Mm و Ce سقوط می کند.
${\displaystyle \tau \propto {\frac {Mm}{MD^{\frac {1}{2}}}}}$،
${\displaystyle t\propto {\frac {Ce}{CG^{\frac {1}{2}}}}}$،
CG را به نقطه F گسترش دهید که در آن،
${\displaystyle CF={\frac {CH^{2}}{MD}}}$ و از آن زمان
${\displaystyle {\frac {Mm}{Ce}}={\frac {MD}{CH}}}$، نتیجه میشود که
${\displaystyle {\frac {\tau }{t}}={\frac {Mm}{Ce}}.\left({\frac {CG}{MD}}\right)^{\frac {1}{ 2}}=\left({\frac {CG}{CF}}\right)^{\frac {1}{2}}}$
از آنجایی که MN = NK، برای سیکلوئید:
${\displaystyle GH={\frac {MD.HD}{DK}}={\frac {MD.CM}{MK}}}$،
${\displaystyle CH={\frac {MD.CK}{MK}}={\frac {MD.(MK+CM)}{MK}}}$، و
${\displaystyle CG=CH+GH={\frac {MD.(MK+2CM)}{MK}}}$
اگر Ce از Mm به K نزدیکتر باشد، پس
${\displaystyle CH={\frac {MD.(MK-CM)}{MK}}} $و
${\displaystyle CG=CH-GH={\frac {MD.(MK-2CM)}{MK}}}$
در هر دو مورد،
${\displaystyle CF={\frac {CH^{2}}{MD}}>CG}$، و بدین ترتیب
${\displaystyle \tau <t}$
اگر قوس، Cc که با زاویه بینهایت کوچک MKm در IJ منتهی می شود، دایره ای نباشد، باید از Ce بزرگتر باشد، زیرا با نزدیک شدن زاویه MKm به صفر، Cec به یک مثلث قائم الزاویه در حد تبدیل می شود.
توجه داشته باشید، برنولی ثابت می کند که CF > CG با یک استدلال مشابه اما متفاوت.
از این نتیجه او نتیجه می گیرد که یک جسم سیکلوئید AMB را در زمان کمتری نسبت به هر منحنی ACB دیگری طی می کند.
روش غیر مستقیم
طبق اصل فرما، مسیر واقعی بین دو نقطه ای که یک پرتو نور طی می کند، مسیری است که کمترین زمان را می گیرد.
با پایستگی انرژی، سرعت لحظه ای یک جسم v پس از سقوط به ارتفاع y در یک میدان گرانشی یکنواخت به دست می آید:
$v={\sqrt {2gy}}$،
سرعت حرکتجسم در امتداد یک منحنی دلخواه به جابجایی افقی بستگی ندارد.
برنولی خاطرنشان کرد که قانون شکست ثابت حرکت یک پرتو نور در محیطی با چگالی متغیر را نشان می دهد:
${\frac {\sin {\theta }}{v}}={\frac {1}{v}}{\frac {dx}{ds}}={\frac {1}{v_{m}}}$ ،
جایی که $v_m $ثابت و است
تتا زاویه مسیر را نسبت به عمود نشان می دهد.
معادلات فوق منجر به دو نتیجه می شود:
در شروع، زمانی که سرعت ذرات صفر است، زاویه باید صفر باشد. از این رو، منحنی براکیستوکرون در مبدأ بر عمود مماس است.
هنگامی که مسیر افقی و زاویه θ = 90 درجه می شود، سرعت به حداکثر مقدار می رسد.
با فرض سادگی که ذره (یا پرتو) با مختصات (x,y) از نقطه (0,0) خارج شده و پس از سقوط در فاصله عمودی D به حداکثر سرعت می رسد:
$v_{m}={\sqrt {2gD}}.$
بازآرایی عبارات در قانون شکست و مربع به دست می دهد:
$v_{m}^{2}dx^{2}=v^{2}ds^{2}=v^{2}(dx^{2}+dy^{2})$
که برای dx بر حسب dy قابل حل است:
$dx=\frac{v\، dy}{\sqrt{v_m^2-v^2}}.$
جایگزین کردن عبارات v و vm بالا به دست می آید:
${\displaystyle dx={\sqrt {\frac {y}{D-y}}}\,dy\,,}$
که معادله دیفرانسیل یک سیکلوئید معکوس تولید شده توسط دایره ای به قطر D=2r است که معادله پارامتری آن عبارت است از:
${\displaystyle {\begin{aligned}x&=r(\varphi -\sin \varphi )\\y&=r(1-\cos \varphi).\end{aligned}}}$
که در آن φ یک پارامتر واقعی است که مربوط به زاویه ای است که دایره غلتشی از طریق آن می چرخد. برای φ داده شده، مرکز دایره در (x, y) = (rφ, r) قرار دارد.
در مسئله براکیستوکرون، حرکت جسم با تکامل زمانی پارامتر به دست میآید:
${\displaystyle \varphi (t)=\omega t\,,\omega ={\sqrt {\frac {g}{r}}}}$
جایی که t زمان رها شدن جسم از نقطه (0,0) است.
راه حل برنولی
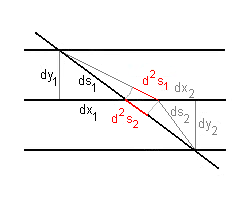
که چگونه می توان از دیفرانسیل دوم برای بدست آوردن شرایط برای حداقل زمان استفاده کرد. یک نسخه مدرن از اثبات به شرح زیر است. اگر انحراف ناچیزی از مسیر کمترین زمان داشته باشیم، برای مثلث دیفرانسیل تشکیل شده از جابجایی در طول مسیر و جابجایی های افقی و عمودی،
$ds^2=dx^2+dy^2.$
در تمایز با dy ثابت دریافت می کنیم،
$2ds\ d^{2}s=2dx\ d^{2}x.$
و در نهایت با تنظیم مجدد شرایط،
${\frac {dx}{ds}}d^{2}x=d^{2}s=v\ d^{2}t$
که در آن قسمت آخر جابجایی برای تغییر داده شده در زمان برای دیفرانسیل دوم است. حال تغییرات دو مسیر همسایه را در شکل زیر در نظر بگیرید که برای آنها فاصله افقی بین مسیرها در امتداد خط مرکزی d2x است (برای هر دو مثلث دیفرانسیل بالا و پایین یکسان است). در امتداد مسیرهای قدیم و جدید، بخش هایی که با هم تفاوت دارند عبارتند از:
تابع مسیر
$d^{2}t_{1}={\frac {1}{v_{1}}}{\frac {dx_{1}}{ds_{1}}}d^{2}x$
$d^{2}t_{2}={\frac {1}{v_{2}}}{\frac {dx_{2}}{ds_{2}}}d^{2}x$
برای مسیر کمترین زمانها، این زمانها با هم برابرند، بنابراین به ازای تفاوت آنها، دریافت میکنیم،
$d^{2}t_{2}-d^{2}t_{1}=0={\bigg (}{\frac {1}{v_{2}}}{\frac {dx_{2}}{ ds_{2}}}-{\frac {1}{v_{1}}}{\frac {dx_{1}}{ds_{1}}}{\bigg )}d^{2}x$و شرط کمترین زمان این است که
${\frac {1}{v_{2}}}{\frac {dx_{2}}{ds_{2}}}={\frac {1}{v_{1}}}{\frac {dx_{1 }}{ds_{1}}}$