


تلاش من و دوستانم از آنجایی که سرعت اولیه سرعت نهایی و فاصله به من داده شده شتاب هواپیما را با استفاده از سینماتیک حل کردم
$a = \frac{v_f^2 - v_i^2}{2d} = \frac{(55.6 m/s)^2 - (16.7 m/s)^2}{2(425m)} = 3.31 m/s^2$
روش من با فرمول های توصیه شده توسط کلاس متفاوته. من تصمیم گرفتم ممان نقطه A را برابر با صفر قرار دهم زیرا هواپیما هنگام حرکت به سمت پایین باند نمیچرخه به نظر میرسه از علم استاتیک یاد گرفتم که اگر جسمی حول یک نقطه معین نمیچرخه می تونیم به سادگی ممان حول آن نقطه را صفر بزارم
اگه N نیروی واکنش در B باشه. با ترکیب فرض بالا با قانون دوم نیوتن در جهت x محاسبه میشه
$\Sigma F_x: R = ma = (140000kg)(3.31 m/s^2) = 4.63 *10^5 N$ $\Sigma M_A: -(15m)N + (2.4m)mg - (1.8m)R = 0$ حل N به من میده $N = 1.64*10^5 N$
با توجه به راهنمای راه حل این غلطه توضیح راه حل:راهنمای ما از فرمولی استفاده میکنه که در کتاب درسی دینامیکم امده برای نقطهای P ثابت روی جسم صلب با مرکز جرم G گشتاور نقطه P به صورت زیر به محاسبه میشه
$\Sigma M_P = I_G\alpha + ma_Gd$
جایی که:$I_G$ ممان اینرسی جسم صلب در مورد G است $\alpha$ شتاب زاویه ای جسم صلب در حدود G است $a_G$ شتاب G است $d$ فاصله ممان-بازو از P تا G از $ma_G$ است
این کتاب نقطه C را در صفحه انتخاب کرد که هم R و هم A (نیروی واکنش در چرخ A) از آن عبور می کنند.ببینید
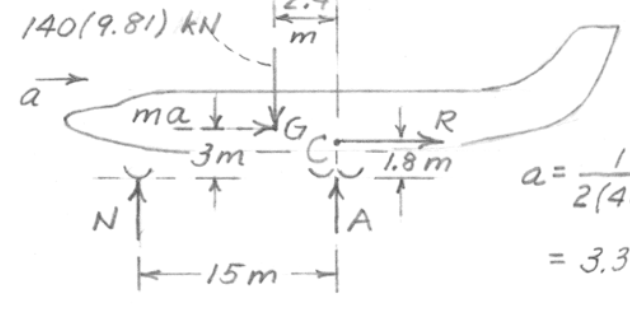
با استفاده از معادله ممان بالا $\alpha = 0$ (به دلیل اینکه هواپیما نمیچرخه) میده $\Sigma M_C = ma_Gd = (15m)N - (3m-1.8m)mg$
در نهایت با استفاده از $a_G = 3.3 m/s^2$ و با حل N به محاسبه میشه $N = 2.57*10^5 N$
چرا من گیج شدم:وای چرا
از درس استاتیک که پاس کردم همیشه به من یاد دادهاند که $\Sigma M = I\alpha$
ین اصطلاح اساساً به این معنیه که یک جسم شتابدهنده بدون چرخش هنوز میتونه یک ممان در حدود یک نقطه داشته باشه. در مقابل در کلاسهای استاتیک من به یاد میآورم که از این واقعیت استفاده کنم که اگر جسمی ساکن باشه ( بدون شتاب زاویه ای) میتونم ممان هر نقطه از جسم را برابر با صفر قرار دهم تا به حل آن کمک کنم.
حدس من در اینجاست که ناهماهنگی در کجاست: در کلاسهای استاتیک من فرض میکردیم که اجسام صلب مورد تجزیه و تحلیل نه تنها شتاب زاویهای صفر بلکه شتاب خطی صفر نیز دارند. (به هر حال این استاتیک است!) در مسائل دینامیک مانند این یک شتاب خطی غیر صفر وجود دارد که باید در نظر گرفته بشه. برای هر جسم نقطه ای ممان در مورد نقطه ثابت O با:$\Sigma M_O = \vec{r} \times \vec{F} = \vec{r} \times m\vec{a}$
وقتی دارم این را می نویسم . به نظر میرسه فرمول استفاده شده توسط راهنمای راه حل هم برای چرخش جسم صلب حول مرکز آن و هم شتاب خطی جسم نسبت به نقطه ای P خارج از مرکز جرم جسم را به حساب میاره یک اشتباه جزئی در روشم هستش. به نظر میرسه فراموش کردم سهم ممان را به دلیل نیروی اینرسی که در مرکز جرم G عمل می کند اضافه کنم
به معادله ممان معادله لحظه ای باید به صورت زیر باشه:
$\sum M_A = -(15 m) N + (3 m) 140*10^3*a + (2.4 m) 140*10^3*g - (1.8 m) 140*10^3*a = 0$ارزیابی برای N
$N = 2.57*10^5 N$
میدونم ممان کل در هر نقطه برای مسئله تعادل پویا و استاتیک همیشه صفر ارزیابی میشه. امیدوارم به شما کمک کند!
:افزودن: آنچه در بالا گفتم واقعا صحیحه اما برای استفاده در کلاس درس و در کل راه حل مورد توافق بیشتر همان راه حلیه که گفتم با استفاده از معادلات حرکت مسطح برای ممونتموها. روشی که در بالا توضیح داده شد کاربرد اصل دالامبره که واقعاً به عنوان یک استدلال خوبه امابیشتر دانشجویان مهندسی مکانیک و هوافضا مثل منو را هنگام استفاده از حل مسئله گیج میکنه من نمیتونم ممان را روی صفر تنظیم کنم مگر اینکه جسم در حرکت خود محدودیت نداشته باشه. اگر میتونستم هر ممونتوم را که حرکت نمیکرد روی صفر تنظیم کنم که استاتیک کار نمیکرد.
چرا گشتاور نیروها بر روی جسم صلب در تعادل ایستا باید در هر نقطه صفر باشه حتی اگر موقعیت آن نقطه روی جسم نباشه
چرا لازم است ممان نیروهای وارد بر جسم صلب در تعادل ایستا در مورد هر نقطه صفر باشه حتی اگر موقعیت آن نقطه روی خود جسم نباشه.جسمی را تحت تأثیر نیروهای Fi $i=1,\ldots,n$در حالت تعادل قرار بدم که در مکان های$r_i$ عمل میکنن $i=1,\ldots,n$. تعادل جسم دلالت داره
$\sum _{i=1}^n r_i \times F_i=0 \ \ \ \ \ \ \ \ \ \ \ \ \ \ \sum _{i=1}^n F_i=0$چه در مورد لحظه در مورد یک نقطه دلخواه p (که ممکنه روی جسم باشه یا نباشه).
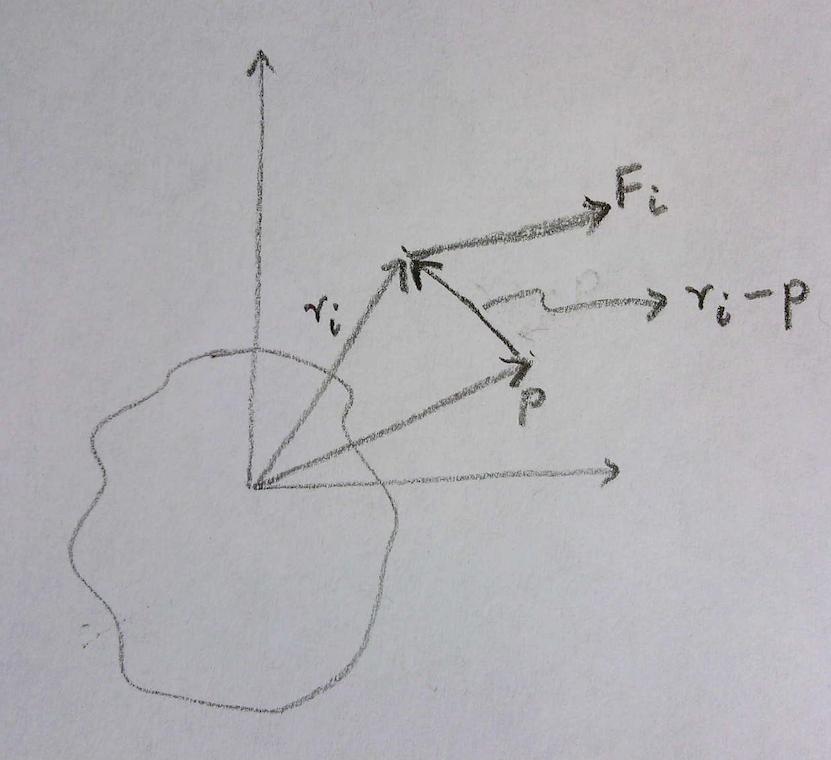
خوب اینجا $\sum _{i=1}^n (r_i-p) \times F_i = \sum _{i=1}^n r_i \times F_i-p\times\sum _{i=1}^n F_i = 0-p\times 0 = 0$از این رو نتیجه. لحظه در مورد هر نقطه صفر است خواه روی جسم باشه یا نباشه.نیروهای اینرسی در حین تجزیه و تحلیل نیروهای روی پیستون در یک لغزنده - مکانیسم میل لنگ؟
$F_{net} = F_p -F_f - F_i$Fp= که $F_p =$ نیروی ناشی از احتراق/فشار و$F_f =$ نیروی اصطکاکی و $F_i =$ نیروی اینرسی وبه دلیل وقوع نیروهای اینرسی نباید $F_{net} = 0$ باشه بله اوردن نیروهای دالامبر یک مسئله دینامیک را به یک مسئله ایستا تبدیل میکنه. معادلات حرکت از
$F_{\rm gas} - F_{\rm friction} - F_{\rm conrod} = m_{\rm piston} a_{\rm piston}$
به$\sum F = F_{\rm gas} - F_{\rm friction} - F_{\rm conrod} - m_{\rm piston} a_{\rm piston} = 0$
در مثال خودم سهم شاتون از طریق پین را فراموش کرده ام و بنابراین نیروهای خالص برابر با صفر ندارم
من متوجه شدم که ما در حال تجزیه و تحلیل پیستون در یک فریم مرجع غیر اینرسی هستم اما نکته سوال من این است که طبق اصل دالامبر هرگاه نیروی اینرسی در خط حرکت جسم وارد شود نیروی خالص وارد بر جسم صفر میشه و جسم در حالت تعادل دینامیکی قرار می گیرد. اما حتی در آن زمان مینویسم:مزیت استفاده از اصل دالامبر در برخورد با سیستم های پویا چیست؟
در کلاس دینامیک ما به شدت به ما توصیه میشه که از روش D'Alembert به جای روش قدیمی برای حل مسائل پویا استفاده کنیم. به عنوان مثال مشکل یک بلوک را که روی یک سطح قرار میگیره در نظر بگیرم (ما cof را می شناسیم): به جای محاسبه نیروی اصطکاک بلوک در شیب و مقایسه آن با جزء وزنی که در شیب عمل میکنه جسم آزاد را ترسیم میکنم. نمودار شامل نیروی اینرسی و حل مستقیم برای a که نشان می دهد که آیا بلوک در حال حرکت است یا نه. سوال من این است که چرا این روش نسبت به روش سنتی توصیه میشه؟ به نظر میرسه که پاسخ معمولاً در رابطه با آسانتر کردن حل مسائل پیچیدهتر است اما من کاملاً نمیدونم چرا این کار بیاهمیت قانون دوم نیوتن حل مسائل را بسیار آسانتر میکنه؟
سپس می توان سیستم را دقیقاً به عنوان یک سیستم ساکن تحت تأثیر این "نیروی و گشتاور اینرسی" و نیروهای خارجی تجزیه و تحلیل کرد. مزیت اینه که در سیستم استاتیک معادل میتونم در هر نقطه (نه فقط مرکز جرم)ممانهایی را در نظر بگیرم بنابراین میتونم این سیستم را به عنوان یک سیستم ساکن ارزیابی کنم که در معرض "نیروی و گشتاور اینرسی" و همچنین نیروهای خارجی قرار میگیره. مزیت اینه که می توان در مورد هر موقعیتی در سیستم استاتیک قابل مقایسه (نه فقط مرکز جرم) ممانهایی را در نظر گرفت.این اصل بیان میکنه که مجموع تفاوتهای بین نیروهای وارد بر سیستمی از ذرات پرجرم و مشتقات زمانی ممان خود سیستم که بر هر جابجایی مجازی مطابق با محدودیتهای سیستم پیشبینی میشود صفره.بنابراین. در نماد ریاضی اصل دالامبر به صورت زیر نوشته میشه:${\displaystyle \sum _{i}(\mathbf {F} _{i}-m_{i}{\dot {\mathbf {v} }}_{i}-{\dot {m}}_{i}\mathbf {v} _{i})\cdot \delta \mathbf {r} _{i}=0,}$
i یک عدد صحیح است که برای نشان دادن یک متغیر مربوط به یک ذره خاص در سیستم استفاده میشه{\mathbf {F}}_{i} کل نیروی اعمال شده (به استثنای نیروهای محدودیت)
مکانیک سیالات - جریان سیال
1.) برای این سوال آیا نیروی گرانش را در نظر می گیرم من از آن استفاده کرده ام اما مطمئن نیستم که آیا این استنتاج کلی من را باطل میکنه یا خیر. از آنجایی که جریان یک بعدی و در جهت x است آیا باید فقط تکانه و نیروهای آن جهت را در نظر بگیریم؟ پس باید pg را حذف کنم؟
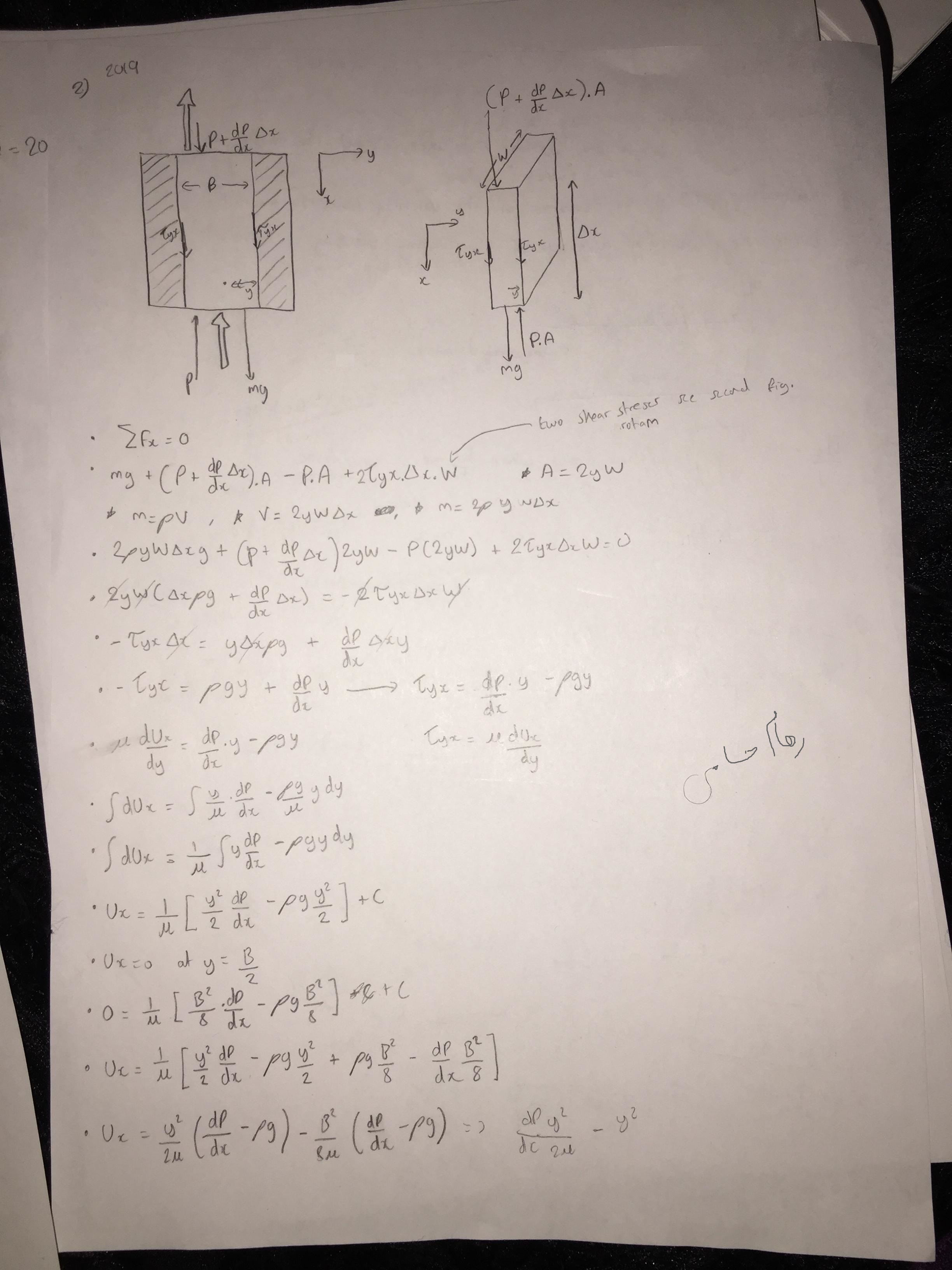
اما گرانش برای تعادل نیرو مهم است. در موازنه نیرو گرانش نیروهای اصطکاک ناشی از تنش سطحی/برشی آب و فشاری که از جهتی به سیال وارد میشه تا تعادل را کامل کند خواهید داشت.
من چیزی در سوال ندیدم که جهت جریان را نشان دهد اما ساده ترین آن احتمالاً این است که فرض کنیم جریان به سمت پایین یا بالا می رود. گرانش در جهت رو به پایین عمل می کند بنابراین یا یک فشار یا یک نیروی اصطکاک باید با نیروی گرانشی که در جهت عمودی عمل می کند متعادل شود یا در آن جهت شتابی وجود خواهد داشت. از آنجایی که جریان ثابت است شتاب نمی گیرد. اگر جریان را به سمت بالا انجام دهید به فشاری نیاز دارید که در جهت بالا عمل کند که سپس نیروی اصطکاک و گرانش را با هم مقابله کنه.اگر جریان عمودی باشه همچنان فشارهایی در امتداد طرف خواهم داشت تا مطمئن شوم جریان در یک جهت حرکت می کند اما فقط می توانید بگویید که فشاری در آنجا وارد میشه و دو طرف تعادل را به صفر می رساند و این در تعادل نیرو بی معنیه .اگر جریان در سراسر صفحه افقی باشه نیروی اصطکاکی در آن جهت خواهم داشت که علاوه بر نیروهای عمودی که در محل باقی میمونند باید با مقداری فشار نیز در نظر بگیرم.
در مکانیک سیالات ما اغلب در مورد عدد رینولدز اصطلاح نیروی اینرسی را می بینیم. مشکل اینه که من واقعاً متوجه نشدم که این نیروی اینرسی چیه. اساساً، مفهوم اینرسی همان چیزیه که توسط قوانین نیوتن ارائه شده است که در آن ما اینرسی را به عنوان مقاومت یک جسم برای تغییر حالت حرکتش میدونیم
این نیروی اینرسی در مکانیک سیالات به نظر میرسه که با سمت چپ معادله ناویر-استوکس مرتبط باشه$\rho \left(\dfrac{\partial \mathbf{u}}{\partial t} + (\mathbf{u}\cdot \nabla )\mathbf{u}\right) = -\nabla p+(\lambda + \mu)\nabla(\nabla\cdot\mathbf{u}) + \mu \nabla^2\mathbf{u}$
اما من واقعاً نمی فهمم چرا اینطوره. بنابراین واقعاً نیروی اینرسی در یک زمینه کلی تر چیه؟ و چگونه در مکانیک سیالات، نیروی اینرسی را با سمت چپ معادله ناویر-استوکس مرتبط کردیم؟
نیروی ساختگی که نیروی شبه نیز نامیده میشه نیروی دالامبر [ یا نیروی اینرسی نیروی ظاهریه که بر همه جرم هایی که حرکت آن ها با استفاده از یک غیر غیر قابل توصیفه عمل میکنه. فریم مرجع اینرسی مانند یک فریم مرجع چرخان..این اصل دالامبر است. ایده اصلی و بسیار کلی اینه که قانون دوم نیوتن را که برای یک جرم در حال شتاب اعمال میشه گرفته و آن را به صورت F−ma=0 بنویسم.من می تونم همین کار را با معادلات ناویر-استوکس انجام دهم. به نظر مجموعهای از نیروها در واحد حجم است که مجموع آن صفره در این حالت با نیروی اینرسی آنها به نیروی شبه از یک فریم مرجع غیر متوسط اشاره نمیکنند. در عوض با نیروی اینرسی به نیروی ناشی از تکانه سیال اشاره مکنه. این معمولاً در معادله تکانه با عبارت (ρv)v میگیم. بنابراین، هر چه یک سیال چگال تر باشه و هر چه سرعت آن بیشتر باشه تکانه (اینرسی) بیشتری داره
