


، شعاع دنده پینیون r1, ضریب دنده GR بین پینیون و خار، شعاع چرخ R و جرم وسیله نقلیه m
. من فرض می کنم هیچ نیروی مقاومتی وجود ندارد.بنابراین من دارم
$P=mar_1G_R\omega_2=m\alpha_2\omega_2(r_1G_r)^2,$
ω2 و \alpha_2 نشان دهنده سرعت زاویه ای و شتاب زاویه ای چرخ دنده است. شبیه یک معادله دیفرانسیل به نظر می رسد، و وقتی آن را حل می کنم، دریافت می کنم
$\omega_2=\frac 1{r_2G_r}\sqrt{ \frac {2Pt}{m}+C}$
، و سرعت ماشین فقط این برابر R است. مشکل این است که چگونه باید کار کند. وقتی GR
افزایش می یابد، شتاب کاهش می یابد. معادلات چه اشکالی دارد؟
این یک مدل بسیار ساده است، ما کشش هوا، اصطکاک، انتقال وزن و غیره را در نظر نمی گیریم.
می توانید شتاب را به عنوان تابعی از قدرت موتور محاسبه کنید و همچنین نمودارهای زمان و جابجایی را تحت توان ثابت محاسبه کنید.
$a = \frac{P}{m v}$
$\begin{aligned}
t &= \int_{v_0}^v \frac{1}{a} \,{\rm d}v & x & = \int_{v_0}^v \frac{v}{a} \, {\rm d}v \\
&= \frac{m}{2 P} \left( v^2 - v_0^2 \right) & &=\frac{m}{3 P} \left( v^3 - v_0^3 \right) \\
v &= \sqrt{ \frac{2 P t}{m} + v_0^2 } & x & = \frac{m}{3 P} \left( \left( \frac{2 P t}{m} + v_0^2 \right)^{3/2} - v_0^3 \right)
\end{aligned}$
ساختن یک مدل ریاضی دقیق از یک ماشین نسبتاً پیچیده است. حتی ابتدایی ترین نسخه ساده شده شامل حداقل 5 مؤلفه در حال تعامل است که 4 معادله بین آنها وجود دارد:
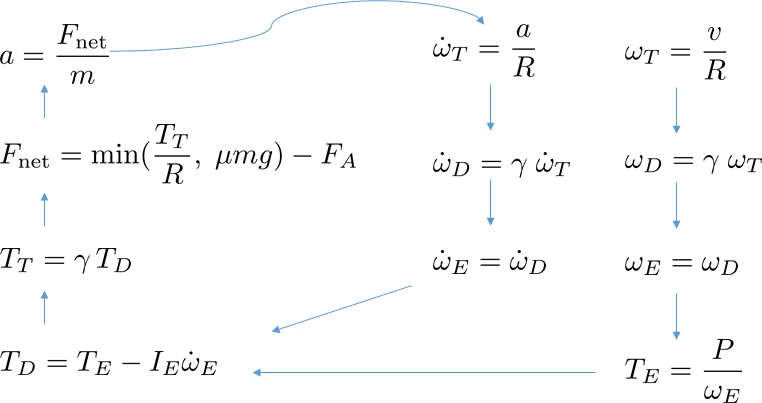
توجه کنید که برای بدست آوردن نیروی خالص Fnet (و در نتیجه شتاب) باید هر 4 تعامل بالا را مدل کنید.
