

من یک سوال در مورد چرخش ژیروسکوپ دارم اما سردرگمی خود را به طور خاص به شرح زیر توضیح میدم
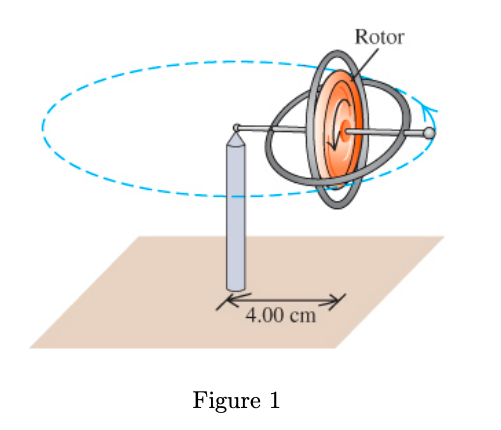
من این مفهوم را درک میکنم که اگر روتور برای چرخش ساخته شود در جهتی که توسط قانون دست راست در این مورد در سمت راست صفحه یک تکانه زاویهای ایجاد میشود میدانم. این همراه با گشتاور وارد شده به صفحه توسط وزن جسم باعث می شود ژیروسکوپ شروع به چرخش در یک دایره کند.با این حال چیزی که من رادچار اشتباه میکنه می کند این است که اگر دوره چرخش ژیروسکوپ T به من داده بشه
و جرم و گشتاور اینرسی روتور چگونه می توانم سرعت چرخش روتور را محاسبه کنم؟ چه نوع معادله ای می تواند به من اجازه دهد که این دو مفهوم را معادل سازی کنم و سرعت چرخش روتور را حل کنم؟
برای جلوگیری از هر گونه سردرگمی بین دو سرعت زاویه ای که با آنها سروکار داریم ابتدا نمادی را که استفاده خواهم کرد بیان می کنم. جرم ژیروسکوپ m است
ممان اینرسی I و فاصله آن تا نقطه محوری r. زاویه θ نشان دهنده زاویه ای است که ژیروسکوپ نسبت به نقطه محوری ترسیم می کند و $\Omega = \frac{d \theta}{dt}$
چیزی است که من آن را سرعت زاویه ای تقدیمی می نامم. در همین حال $\omega_s$
نشان دهنده سرعت زاویه ای چرخش خود ژیروسکوپ است. همانطور که اغلب در کتاب های درسی $\vec \tau$ دیده می شود
بیانگر گشتاور و $\vec L$ است
حرکت زاویه ای را نشان می دهد.پاسخ این سوال در رابطه بین سرعت زاویه ای چرخشی خود ژیروسکوپ و سرعت زاویه ای تقدیمی کل سیستم نهفته است. ابتدا باید متوجه باشیم که تکانه زاویه ای چرخشی ژیروسکوپ به وسیله:$\vec{L} = I \omega_s \hat r$
کجا $\hat r$ یک بردار واحد است که از محوری که میله در هر لحظه به سمت مرکز ژیروسکوپ قرار می گیرد اشاره می کند. از آنجایی که یک سرعت زاویه ای تقدیمی نیز وجود دارد یک تکانه زاویه ای مداری به سمت بالا وجود خواهد داشت (با فرض اینکه ژیروسکوپ در صفحه عمود بر میله عمودی در حال چرخش می ماند) اما همانطور که خواهیم دید گشتاور بر آن عمود خواهد بود و بنابراین عمود خواهد بود. ثابت باشد بنابراین برای سوال پرسیده شده جالب نیستش.
ما همچنین میتوانیم یک رابطه مهم را در مسئله یادداشت کنیم که در یافتن مشتق زمانی کل این بردار تکانه زاویهای ایجاد میشود (مهم است به خاطر داشته باشید که میخواهید $\frac{d \vec L}{dt}$ را پیدا کنید. و نه $\frac{d |\vec{L}|}{dt}$ از آنجایی که بزرگی تکانه زاویه ای اسپین به دلیل این واقعیت که هر دو I و $\omega_s$ ثابت هستند؛ در عوض من تغییر بردار دادم تا چرخش آن را مطالعه کنم که مستقیماً با سرعت زاویه ای تقدیمی Ω مرتبطه.
) استفاده كردن:$\frac {d \hat r}{dt} = \frac{d \theta}{dt}\hat \theta$
جایی که $\hat \theta$ عمود بر $\hat r$است
و در همان صفحه با آن و θ چیزی است که قبلاً ایجاد شده است. بنابراین می توانیم مشتق زمانی بردار تکانه زاویه ای را با نتیجه انجام بدم
$\frac {d \vec L}{dt} = I \omega_s \frac{d \theta}{dt} \hat \theta = I \omega_s \Omega \hat \theta$بنابراین مقدار این مشتق به صورت زیر محاسبه میکنم
$|\frac{d\vec L}{dt}| = I \omega_s \Omega$
اما از تعریف $\vec \tau = \vec r \times \vec F = \frac{d \vec L}{dt}$
همچنین به دست میارم
$|\frac {d \vec L}{dt}| = mgr$
از آنجایی که در اینجا $\vec F = m\vec g$
نیروی گرانش است معادل سازی این دو:$mgr = I \omega_s \Omega$
یا چون $\Omega = \frac{2\pi}{T}$
:$mgr = \frac{2\pi I \omega_s}{T}$
و ما می توانیم برای $\omega_s$ را حل کنیم
مقدار مورد نظر:$\omega_s = \frac{mgrT}{2 \pi I}$
به طور خلاصه معادله ای که می توان برای ارتباط بین این دو استفاده کرد $\Omega = \frac{\tau}{L_s}$ است
که به گشتاور و تکانه زاویه ای اسپین جسم مربوط میشه
